热凝电极的制作方法
1.本技术的实施例涉及医疗器械技术领域,尤其涉及一种热凝电极。
背景技术:
2.在seeg电极的电极点间内置温度传感器,使seeg热凝也可以像传统射频仪热凝一样,精确控制热凝区域的温度,但是,seeg电极的电极点数量众多,难以达到全电极范围内的温度监测。以常见的16导电极举例,该电极具有16个电极点,温度传感器可以放置于电极点下方或电极点间的电极丝套管内。在临床使用时,这16个点都有可能需要热凝,因此需要16个(放置于电极点下)/15个(放置于电极点间)温度传感器,才可以达到全电极监测,由于每个t型热电偶由2根电偶丝组成,seeg电极内没有空间放下这额外的32根电偶丝。因此目前的解决方案是只在一个电极点下放置传感器,这样只有刚好在这个点进行热凝时,才可以进行温度控制,剩下的点位还是只能依靠传统的输出功率和热凝时间参数来控制。
技术实现要素:
3.本技术实施例提供了一种热凝电极,能够在热凝电极进行热凝时其全部电极点范围内都能够实现温度检测。
4.本技术实施例提供的热凝电极,包括:
5.热凝电极本体,包括第一管体及设置在所述第一管体上的多个电极点,每个所述电极点能够在外部设备的控制下在其周围形成热凝区域;
6.温度传感器,部分设置在所述第一管体内,所述温度传感器包括设置在所述第一管体内的温度连接线及设置在所述温度连接线上的多个测温元件;
7.操纵装置,与位于所述第一管体外的所述温度传感器连接,能够驱动所述温度连接线在所述第一管体内移动以实现测量一个或多个所述热凝区域的温度。
8.由以上技术方案可知,热凝电极本体的第一管体内设置有部分温度传感器,在第一管体外的部分温度传感器上连接有操纵装置,操纵装置能够驱动温度传感器上的温度连接线在第一管体内移动,在采用热凝电极对人体组织进行热凝时,从而能够检测第一管体上的电极点形成的任一热凝区域的温度。
9.在一种可能的实现方式中,所述温度传感器还包括第二管体,所述温度连接线设置在所述第二管体内,所述操纵装置能够驱动所述温度连接线在所述第二管体内移动以实现测量一个或多个所述热凝区域的温度。
10.在一种可能的实现方式中,所述操纵装置包括:
11.壳体,所述壳体限定有:
12.一个空腔,用于容纳穿过所述第二管体的所述温度连接线;
13.一个表面,所述表面上标识有刻度;
14.滑块,所述滑块与所述壳体滑动连接,所述滑块至少具有:
15.固定部分,所述固定部分位于所述空腔内,用于固定所述温度连接线;
16.标识部分,从所述表面露出。
17.在一种可能的实现方式中,所述壳体包括底座和面板,所述底座上开设有凹槽,在所述底座的上表面上设置有面板以遮盖所述凹槽,所述面板的上表面形成所述表面,所述面板和所述凹槽共同限定所述空腔。
18.在一种可能的实现方式中,所述凹槽相对的侧壁上开设有滑道,所述滑块上设置有子滑块,所述子滑块滑动设置在所述滑道内。
19.在一种可能的实现方式中,所述固定部分限定一个沿所述温度连接线延伸方向分布的腔道,所述温度连接线固定于所述腔道内且能够在所述滑块的带动下在所述第二管体内移动。
20.在一种可能的实现方式中,所述腔道内填充有用于固定所述温度连接线的填充物。
21.在一种可能的实现方式中,还包括加强管,部分所述加强管设置在所述第二管体内,部分所述加强管固定于所述腔道内,所述温度连接线穿设于所述加强管内。
22.在一种可能的实现方式中,所述壳体内开设有与所述刻度匹配的滑道,所述滑块设置有与所述滑道相配合的子滑块,所述子滑块设置于所述滑道内。
23.在一种可能的实现方式中,还包括封堵器,所述封堵器设置于所述第一管体的开口处,所述第二管体贯穿所述封堵器与所述操纵装置连接。
24.应当理解,
技术实现要素:
部分中所描述的内容并非旨在限定本技术的实施例的关键或重要特征,亦非用于限制本技术的范围。本技术的其它特征将通过以下的描述变得容易理解。
附图说明
25.结合附图并参考以下详细说明,本技术各实施例的上述和其他特征、优点及方面将变得更加明显。在附图中,相同或相似的附图标记表示相同或相似的元素,其中:
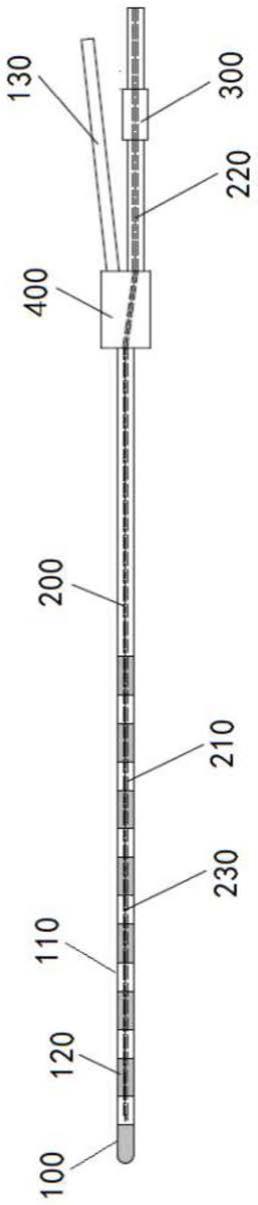
26.图1示出了根据本技术的实施例的热凝电极的结构示意图。
27.图2示出了根据本技术的实施例的操纵装置的结构示意图。
28.图3示出了图2中a-a方向的剖面图。
29.其中:
30.100、热凝电极本体;110、第一管体;120、电极点;130、电极连接线;
31.200、温度传感器;210、第二管体;220温度连接线;230、测温元件;
32.300、操纵装置;310、壳体;320、滑块;
33.311、空腔;312、表面;313、底座;314、面板;315、凹槽;316、滑道;
34.321、子滑块;322、固定部分;323、标识部分;324、腔道;
35.400、封堵器。
具体实施方式
36.为了便于对本技术实施例的理解,首先对本技术实施例涉及的部分术语进行解释。
37.热凝毁损,在人体组织内通过高频电流,使人体组织自身发热,当人体组织温度超
过46℃时人体组织的蛋白质完全变性,形成的不可逆的毁损。
38.预毁损/可逆毁损,使人体组织升温蛋白质发生变性,但是随着时间此变性可逐渐恢复的毁损,使用预毁损技术造成的损伤是可逆的,因此经常用来提前验证完全不可逆毁损的治疗效果。一般认为预毁损的组织温度在44~46℃之间,要达到这一温度范围,在热凝区域必须设有温度传感器,实时监测温度数据并同步传输至射频输出的控制模块中,控制模块根据温度信息实时调整输出能量。
39.seeg热凝,利用植入脑内的颅内深部电极上的两个电极点,作为射频能量输出回路的两极,使这两点间及周围一定范围内的脑组织升温变形,达到热凝毁损的效果。
40.下面将结合附图对本技术实施例提供的热凝电极进行详细说明。
41.传统的射频仪可以通过内置在专用射频电极内的温度传感器(一般为t型热电偶)监控热凝区域的温度,并且利用实时获取的热凝区域温度,及时地、精细地调整输出功率,达到精确控制热凝区域温度的效果。
42.直接控制热凝区域的温度,可以更精确的控制热凝程度和热凝范围。另外精确控温的一大优势在于可以进行“预毁损”或称为“可逆毁损”,通过控制热凝区域的温度在44~46℃之间,使人体组织暂时失去活性,用来验证该位置热凝的疗效,若预毁损显示有效,则可进行完全毁损保证疗效;若预毁损无效或产生不可接受的并发症,则可以选择不进行完全毁损,该部分人体组织可以逐渐复原,避免无效治疗或严重并发症的出现。
43.seeg热凝利用的颅内深部电极没有内置的温度传感器,热凝效果主要通过控制射频功率和热凝时间两个参数来实现。由于需要热凝的区域可能处于人体内任意位置,因此被热凝的人体组织的热凝特性并非固定不变,例如热凝肿瘤或发育不良的脑组织时,脑组织性质和正常脑组织差别很大,导致了同一个射频功率和热凝时间参数下,在脑内可能造成不同程度、不同范围的毁损灶。因此,通过调整射频功率和热凝时间参数,对于脑组织热凝程度和热凝范围的控制精度很低。
44.为解决上述问题,本技术的实施例提供了一种热凝电极,能够在热凝电极进行热凝时其全部电极点范围内都能够实现温度检测,从而实现热凝电极上电极点形成的全部热凝区域的温度可进行检测,达到精确控制的效果。
45.参见图1,热凝电极包括热凝电极本体100、温度传感器200和操纵装置300。热凝电极本体100包括第一管体110及设置在第一管体110上的多个电极点120,多个电极点120连接于设置在第一管体110内的电极连接线 130,电极连接线130可以连接外部设备,使得每个电极点120能够在外部设备的控制下在其周围形成热凝区域。温度传感器200部分设置在第一管体110 内。在一种可能的实现方式中,温度传感器200包括部分设置在第一管体110 内的温度连接线220及设置在温度连接线220上的多个测温元件230。操纵装置300与位于第一管体110外的温度传感器200连接,能够驱动温度连接线220在第一管体110内移动以实现测量一个或多个热凝区域的温度。在另一种可能的实现方式中,温度传感器200包括设置在第一管体110内的温度连接线220及设置在温度连接线220上的多个测温元件。操纵装置300与位于第一管体110外的温度传感器连接,能够驱动温度连接线220在第二管体 210内移动以实现测量一个或多个热凝区域的温度。
46.在本技术实施例中,热凝电极本体100可以通过手术方式将其第一管体110植入人体组织内。示例地,通常在全麻状态下于手术室内通过颅骨钻孔或颅内脑外科手术过程中
植入,颅骨钻孔植入可以采用立体定向框架或无框架立体定向技术。当然,在将热凝电极本体100植入人体其他组织时,可以将半刚性的管心针或推进器安置在第一管体110的中空部位,用其将第一管体110插入,第一管体110插入后,移除管心针或推进器,将第一管体110 留在人体组织内。
47.在热凝电极本体100植入人体组织后,可以通过外部设备的控制使热凝电极本体100上的电极点120在其周围形成多个热凝区域,在这个过程中,若需要对某一个或多个热凝区域的温度进行检测时,可以通过操纵装置300 来移动温度连接线220,使得设置在温度连接线220上的一个或多个测温元件230能够到达不同的热凝区域,以实现对不同热凝区域的温度进行检测。
48.参见图2,操纵装置300包括壳体310和与壳体310滑动连接的滑块 320。壳体310在其内部限定一个空腔311,在其外表限定一个表面312。在一种可能的实现方式中,滑块320的滑动方向沿着温度连接线220的延伸方向。在一种可能的实施方式中,参见图3,壳体310可以由底座313和面板 314形成,底座313上开设有凹槽315,在底座313的上表面上设置面板314 以遮盖该凹槽315,面板314的上表面形成表面312,由面板314和凹槽315 共同限定空腔311,在凹槽315的两相对的侧壁上开设有滑道316,滑块320 上设置有子滑块321,子滑块321设置在滑道316内,通过子滑块321和滑道316的配合,能够实现滑块320和壳体310的相对滑动。
49.滑块320至少具有固定部分322和标识部分323,固定部分322位于空腔311内,空腔311的大小尺寸能够适于该固定部分322在其内发生移动。标识部分323从壳体310的表面露出,表面312上具有刻度,在滑块320与壳体310发生相对滑动时,表面312上的刻度能够标识滑块320与壳体310 相对滑动的距离。固定部分322限定一个沿温度连接线220延伸方向分布的腔道324,温度连接线220固定于该腔道324内,该温度连接线220能够随着滑块320的移动而发生移动。
50.在一种可能的实现方式中,继续参见图2,将第二管体210断开部分,断开的两端均连接于壳体310上,使得断开部分的两端均有部分位于空腔311 内,从而两截第二管体210和空腔311共同限定了一个可供温度连接线220 移动的通道。也就是说,温度连接线220分布于第二管体210和空腔311,位于空腔311内的温度连接线220穿过滑块320的固定部分322上的腔道 324,为了将温度连接线220固定在腔道324内,使得温度连接线220能够跟随滑块320的滑动而移动,可以在腔道324内增加填充物,以将温度连接线220固定在腔道324内。在一种可能的实施方式中,可以在腔道324内充填填充胶来固定温度连接线220。在其他可能的实施方式中,还可以通过其他的方式来固定温度连接线220,例如通过卡紧或锁紧装置来将温度连接线 220固定在腔道324内。进一步地,两截第二管体210正对设置,从而能够使得温度连接线220能够沿其延伸方向直线运动,避免温度连接线220在可供其移动的通道内移动时位于第二管体210内的部分发生扭转或弯折。
51.由于空腔311内部空间相对于温度电极线220移动的距离相对较大,因此在温度连接线220随着滑块320移动时,可能会发生温度连接线220在第二管体210内被扭转或弯折的情况。为了避免这种情况的发生,可以在第二管体210内设置加强管211。具体地,使得加强管211一端伸入第二管体210 靠近空腔311的部分,另一端伸入并固定到滑块320的腔道324内,温度连接线220穿过该加强管211,在滑块320带动温度连接线220移动时,使得位于第二
管体210内的温度连接线220不会随之发生扭转或弯折。
52.在一种可能的实现方式中,在第一管体110的开口处设置有封堵器400,第二管体210和电极连接线130均穿过该封堵器400,从而既能对第一管体 110进行封堵,又能防止电极连接线130对第二管体210的影响。
53.以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的申请范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离前述申请构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中申请的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1