一种临床检查管道置入辅助系统
1.本实用新型涉及临床检查设备领域,尤其涉及一种临床检查管道置入辅助系统。
背景技术:
2.在临床检验中,置入管道进行影像检测由于具有准确性高等优点,在临床上广泛采用,比如鼻胃管、气管插管、喉镜等等。
3.以鼻胃管为例,目前,在临床护理中,鼻胃管是一个很重要的工具。而鼻胃管的置管也是一项重要的操作。但是由于食管和气管的特殊构造,在置入鼻胃管的过程中,很容易误插入气管,危及患者生命安全,造成重大的医疗事故。
4.目前鼻胃管的置入过程是将鼻胃管经鼻腔进入食管再进入胃里,进入胃中后使用常用确认方法确认管道是否置入胃中。现有常用的解决方案已经有很多,比如:
5.1.通过传统手段判断,包括:是否能够回抽到胃液;听气过水音;将管端没入水,观察患者呼吸时是否有成串气泡溢出;观察患者是否有误入气管的不适反应;
6.上述方案的缺点包括:
7.a.有时气管内也有可能存在一些分泌物,回抽时会被误认为是胃液,从而影响医护人员的判断;
8.b.如果胃管置入深度不够,管端未进入胃液中,则不会产生气过水音,影响判断;
9.c.部分患者(如老年人或昏迷患者)耐受较强、咳嗽反应差,不会及时产生呛咳等不适反应,影响判断;
10.由于以上缺点的存在,临床护理工作中,曾经多次发生胃管误入气管而造成的重大事故。
11.2.比如中国实用新型专利cn 203342168 u,其通过在胃管内嵌套酸碱显色试纸,当判断到胃管已经置入胃中后,抽出显色试纸,通过试纸颜色判断胃管是否正确置入胃中;
12.这种方案缺点包括:
13.a.该方法只是判断胃管是否正确置入胃中,而不能提高置管成功率,医护人员仍然需要凭自己的经验来进行胃管的置入操作,操作难度没有降低;
14.b.该方法即便判断到胃管置入错误,还是要拔出重新置管;反复置管会给患者带来严重的心理负担,损伤患者粘膜,带来安全隐患。
15.3.比如中国实用新型专利cn 211934896 u,其通过类似胃肠镜的实现方法,依靠仪器辅助,通过电脑等设备查看胃管前端传回的实时图像,来判断胃管是否准确置入到了胃中。
16.这种方法的缺点包括:
17.1.受限于仪器,操作场所过于局限,不够灵活,如胃肠镜一样,该方案的置入操作高度依赖复杂的检测仪器,必须在专门的监护室内进行,在没有设备的环境下无法使用;
18.2.检查费用高。
技术实现要素:
19.本实用新型的目的就在于提供一种临床检查管道置入辅助系统,以解决上述问题。
20.为了实现上述目的,本实用新型采用的技术方案是这样的:一种临床检查管道置入辅助系统,包括辅助系统主体,所述辅助系统主体的头部设置有头部检测单元和转向单元,在所述辅助系统主体的尾部设置有尾部反馈显示单元,所述头部检测单元与转向单元和尾部反馈显示单元分别电连接。
21.本技术中的“电连接”,是本领域的公知常识,即为线路构造中不同元器件之间通过pcb铜箔或导线等可传输电信号的实体线路进行连接的形式。
22.上述辅助系统主体,用于本辅助系统头部(包括头部检测单元和转向单元)和尾部(反馈显示单元)的物理连接,同时所述辅助系统主体内部还有信号导线,用于将头部处理单元的状态和检测结果传输给尾部的反馈显示单元;
23.本技术的辅助系统,采用类似套管的实现方法,通过套入比如胃管的内腔来引导胃管准确置入患者胃部。具体而言:将本技术的辅助系统伸入待置入的管道比如胃管等,其中头部从比如胃管的最前端伸出,然后与胃管等一起插入人体内,通过头部的检测单元检测管道所处的位置,比如用于鼻胃管插管时,用于识别气管入口和食道口,并通过转向单元调整管道伸入的角度,比如用于鼻胃管时,用于调整鼻胃管前端的转向和角度,引导鼻胃管进入患者胃部,并在尾部反馈显示单元显示管道的位置及插入结果,即用于反馈实时操作过程及ph值等等,从而保证管道能够准确插入预定位置,并提高置入效率。
24.作为优选的技术方案:所述头部检测单元包括相互电连接的核心处理器和微型高清摄像头。
25.本技术的头部检测单元,是一个微电脑系统,类似于pda,其中的核心处理器用于处理各种功能器件的数据并发出动作指令,微型高清摄像头在系统的最前端,用于检测管道所到达的位置。
26.作为进一步优选的技术方案:所述头部检测单元还包括超声波发射器,所述超声波发射器也与所述核心处理器电连接。
27.作为更进一步优选的技术方案:所述头部检测单元还包括酸碱度检测传感器,所述酸碱度检测传感器也与所述核心处理器电连接。
28.作为更进一步优选的技术方案:所述头部检测单元还包括ai识别芯片,所述ai识别芯片也与所述核心处理器电连接。
29.作为优选的技术方案:所述转向单元由至少一个转向关节构成,所述转向关节包括水平转向马达、连接杆和垂直转向马达,所述水平转向马达与垂直转向马达通过连接杆连接。
30.即一个转向关节由两个马达组成,水平转向马达用于水平角度控制,垂直转向马达用于垂直角度控制,在两个方向马达的协同工作下,可以控实现鼻胃管前端进行360度的方向调整;这是现有公知的机械臂结构。
31.一般正常情况下,一至两个转向关节就可以完成胃管前端的转向角度控制。不过关节越多,可控制的角度转向越精确,当然,转向关节数量过多会增加成本和系统的复杂性。图6示出了单关节(左)与多关节系统9右的对比图,从图中可以看到,多关节系统的调整
角度更为圆滑,不易形成较大的拐角。
32.作为优选的技术方案:所述尾部反馈显示单元为液晶屏。
33.作为优选的技术方案:所述辅助系统主体为软质中空管。其硬度优选与胃管相当,材质过硬会有可能戳伤患者。
34.作为进一步优选的技术方案,在所述软质中空管内布置有用于电源和信号连接的连接导线。
35.本技术尤其针对鼻胃管的置入提出了一种能够实现自动插入的辅助系统;本领域技术人员能够理解的,本技术的辅助系统除了应用于鼻胃管外,还可进一步应用于其他管道置入操作,如气管插管、喉镜等插管操作中。只要给ai视觉识别系统指定目标的特征值,本系统就可以按照该特征自动识别目标并到达预定位置;从而在提高操作准确度的同时,还可以减轻患者痛苦,降低了医护工作人员的工作难度。
36.与现有技术相比,本实用新型的优点在于:
37.1.操作简单,容易掌握;整个过程可以由辅助系统自动引导管道置入患者体内目标部位,减轻患者痛苦,减少医护人员工作难度,节约时间;
38.2.对于鼻胃管置入,通过ai视觉识别和酸碱度检测双重判断,有效保证胃管置入位置的准确性;
39.3.系统结构简单,操作过程不需要其他复杂大型仪器的参与,医护人员在任何环境下都可以进行操作,实用性强,检查费用低。
附图说明
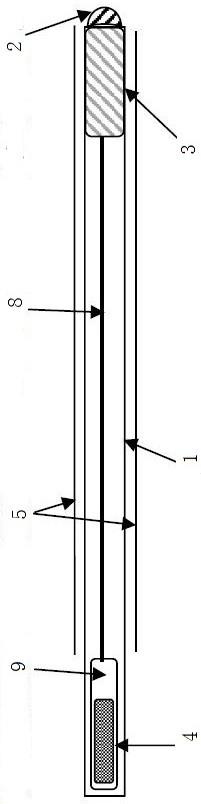
40.图1为本实用新型实施例1的结构示意图;
41.图2为图1中的头部检测单元的结构示意图;
42.图3为图2中超声波发射器的工作原理图;
43.图4为转向单元中其中一个转向关节的结构示意图;
44.图5为图1中头部检测单元与尾部反馈显示单元的工作原理图;
45.图6为转向单元采用单关节(左)与多关节(右)的对比图。
46.图中:1、辅助系统主体;2、头部检测单元;21、核心处理器;22、微型高清摄像头;23、超声波发射器;24、酸碱度检测传感器;3、转向单元;31、水平转向马达;32、连接杆;33、垂直转向马达;34、水平旋转面;4、尾部反馈显示单元;5、鼻胃管;6、超声波;7、器官内壁;8、连接导线;9、电池。
具体实施方式
47.下面将结合附图对本实用新型作进一步说明。
48.实施例1:
49.参见图1,一种临床检查管道置入辅助系统,包括辅助系统主体1,所述辅助系统主体1为软质中空管,所述辅助系统主体1的头部设置有头部检测单元2和转向单元3,在所述辅助系统主体1的尾部设置有尾部反馈显示单元4,在所述辅助系统主体1的尾部还设置有为整个辅助系统供电的电池9,所述头部检测单元2与转向单元3和尾部反馈显示单元4电连接;本实施例中,头部检测单元2位于辅助系统主体1最头端,转向单元3位于辅助系统主体1
头端的中空管内,用于电源和信号连接的连接导线8也位于中空管;
50.本实施例以鼻胃管5的辅助置入为例:
51.参见图2,所述头部检测单元2包括相互电连接的核心处理器21、微型高清摄像头22、超声波发射器23和酸碱度检测传感器24,所述微型高清摄像头22、超声波发射器23和酸碱度检测传感器24均与所述核心处理器21电连接;
52.本实施例中,所述头部检测单元2还包括ai识别芯片,所述ai识别芯片也与所述核心处理器2电连接;
53.本实施例的转向单元3由三个转向关节构成,所述转向关节的结构如图4所示,包括水平转向马达31、连接杆32和垂直转向马达33,所述水平转向马达31与垂直转向马达33通过连接杆32连接,图4中,通过水平旋转面34和竖直旋转面的配合实现任意角度的方向调整;
54.即一个转向关节由两个马达组成,水平转向马达31用于水平角度控制,垂直转向马达33用于垂直角度控制,在两个方向马达的协同工作下,可以控实现鼻胃管5前端进行360度的方向调整;
55.在微型高清摄像头的辅助下,通过加入现有公知的ai识别芯片实现ai识别功能:通过内置ai视觉识别算法,区分气管口和食管口;并通过结果控制转向单元的相应马达向食管口转向,从而完成引导胃管进入食管的操作;
56.ai视觉识别算法的核心点是特征值检测:由于在人体食管和气管连接处,存在有会厌这个特殊部分,所以可以通过建立视觉识别算法模型并对其进行训练,从而完成系统对会厌结构的识别;
57.由于会厌是在气管入口上方,所以在ai识别单元识别到会厌后,会调整转向单元的角度,将鼻胃管5前端引导至后方的食管入口;
58.当识别到食管入口后,还进一步优选超声波发射器23进行辅助,如图3所示,通过超声波6准确调整鼻胃管5前端的转向角度,当超声波6检测到器官内壁(图3左图),系统会自动通过转向单元3修正转向角度(图3右图),以防止转向过度而划伤器官内壁7(本实施例即食管粘膜);
59.同时,内置的酸碱度检测传感器24,用于检测当前环境下的酸碱度值,并将数值反馈给尾部的尾部反馈显示单元4,用于医护人员了解当前环境的具体酸碱ph值;
60.本实施例的所述尾部反馈显示单元4为液晶显示屏,如图5所示,该单元的主要作用是显示头部检测单元2中酸碱度检测传感器24的检测结果,以供操作人员判断胃管是否已经准确进入胃部,一般如果ph值<2,即判断准确进入胃部,然后将本辅助系统从胃管中抽出,完成鼻胃管的置入。
61.实施例2:
62.本实施例与实施例1相比,不设置ai识别单元,其余与实施例1相同,本实施例虽然智能化程度降低,但是仍能实现管道的辅助插入功能,以及插入结果的检测(通过酸碱度检测的反馈来确认是否正确置入胃中)。
63.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1