一种踝关节康复机器人的制作方法
1.本发明创造属于医疗器械,特指一种踝关节康复机器人。
背景技术:
2.踝关节康复机器人是一种辅助患者的踝关节开展被动运动、日常活动和促进康复的医疗器械,其中,踝关节康复机器人包括机械关节,机械关节可在电机驱动下,用于协助踝关节器官辅助患者的踝关节进行康复运动。人体的踝关节在正常活动中包括三个自由度,分别为跖屈-背伸方向上的自由度、内旋-外旋方向上的自由度、内翻-外翻方向上的自由度。
3.如公告号“cn101596139b”公开了一种三自由度踝关节辅助运动外骨骼,通过对x轴电机、y轴电机和z轴电机的旋转角度控制,可实现外骨骼辅助患者实现踝关节背屈/跖屈、内翻/外翻和内旋/外旋三个自由度的分别运动及环绕的协同运动。这种结构与现有的踝关节外骨骼相比,拥有更多自由度的运动并且实现了环绕这一协同运动,其结构新颖,轻便灵巧,便于穿戴,控制方便,可以作为人体踝关节肌肉萎缩或者残疾人士的医疗康复辅助器械。
4.然而现有技术不够完善,存在如下几个方面亟需改善:
5.(1)康复机器人的各个自由度上的运动相互独立的问题:现有的踝关节康复机器人采用多个电机分别对多个自由度上的踝关节运动进行单独控制,彼此之间缺乏关联,为了让康复机器人带动踝关节在多个自由度上进行运动,需要多个电机同时对踝关节进行驱动,这就导致了控制复杂、难以设计出符合人体运动工程学的控制方式的问题。
6.(2)康复机器人在每个自由度上的运动均需要独立的电机进行驱动,多个电机的结构造成了设备结构复杂和成本高的问题。
技术实现要素:
7.为克服现有技术的不足及存在的问题,本发明创造提供一种踝关节康复机器人。
8.为实现上述目的,本发明创造采用如下技术方案:
9.一种踝关节的康复机器人,包括患侧康复装置,患侧康复装置用于辅助患侧踝关节的康复运动,患侧康复装置包括:
10.第一腿托架,第一腿托架用于固定患侧的小腿;
11.第一足托架,用于固定患侧的足部;
12.第一支架,第一足托架通过第一支架铰接在第一腿托架上,第一支架可在第一腿托架上前后转动;
13.第一驱动装置,传动连接在第一支架上,用于带动第一支架在第一腿托架上转动;
14.第二支架,第一足托架通过第二支架铰接在第一支架上,第二支架可在第一支架上左右旋转;
15.第二驱动装置,传动连接在第二支架上,用于带动第二支架在第一支架上左右旋
转;
16.第三支架,第一足托架通过第三支架铰接在第二支架上,第三支架可在第二支架上左右翻转;
17.传动件,传动件连接在第一支架和第三支架之间,第一支架、第二支架、第三支架和传动件构成空间连杆机构,若第二支架在第一支架上转动时,可带动第三支架在第一支架上转动。
18.在一些方式中,所述传动件包括第一连杆、第二连杆和第三连杆,第一连杆固定设置在第一支架上,第一连杆可转动和滑动地设置在第二连杆上,第三连杆可转动和滑动地设置在第二连杆上,第三连杆还铰接在第三支架上。
19.在一些方式中,所述第一连杆包括第一轴肩,第三连杆包括第二轴肩,第二连杆上分别开设有第一轴孔和第二轴孔,第一轴孔的轴向和第二轴孔的轴向相互垂直,第一轴肩的横截面、第二轴肩的横截面、第一轴孔的横截面和第二轴孔的横截面均为圆形,第一轴肩设置在第一轴孔内,第二轴孔设置在第二轴孔内。
20.在一些方式中,所述第一轴孔和第二轴孔均为盲孔,第二连杆上可拆卸设置有第一端盖和第二端盖,第一端盖设置在第一轴孔的外端,第二端盖设置在第二轴孔的外端。
21.在一些方式中,还包括第一落地架,第一足托架设置在第一落地架上。
22.在一些方式中,所述第一落地架和第一足托架之间设置有角度调节机构,角度调节机构用于调节第一足托架在第一落地架上的角度。
23.在一些方式中,所述第一腿托架包括第一腿托板和第一长度调节机构,第一长度调节机构设置在第一腿托板和第一支架之间,第一长度调节机构用于调节第一腿托板和第一支架上的第一足托架之间的距离。
24.在一些方式中,还包括健侧康复装置,健侧康复装置用于辅助健侧踝关节的康复运动。
25.在一些方式中,所述健侧康复装置包括第二腿托架、第四支架、万向节和第二足托架,第二腿托架用于固定健侧的小腿,第二足托架用于固定健侧的足部,第四支架铰接在第二腿托架上,第四支架可在第二腿托架上前后转动,万向节设置在第四支架和第二足托架之间,第二足托架可通过万向节在第四支架上进行左右偏转和左右翻转。
26.在一些方式中,所述万向节包括第一构件、第二构件和第三构件,第一构件固定设置在第四支架上,第三构件固定设置在第二足托架上,第二构件铰接在第一构件上,第二构件还铰接在第三构件上,第一构件在第二构件上的转动方向和第三构件在第二构件上的转动方向相互垂直。
27.本发明创造相比现有技术突出且有益的技术效果是:
28.在本发明创造中,第一支架、第二支架、第三支架和传动件构成空间连杆机构,使得第二支架在第一支架上的左右旋转和第三支架在第二支架上的左右翻转构成联动,第二驱动装置带动第二支架在第一支架上左右旋转时,还带动第三支架在第二支架上左右翻转,单个第二驱动装置即可实现患侧踝关节在内旋-外旋自由度和内翻-外翻自由度上的协同动作,通过对空间连杆机构的设计即可设计出符合人体运动工程学的控制方式,因此本发明创造具有控制简单、便于设计、结构精简、成本低廉和康复效果好的优点。
附图说明
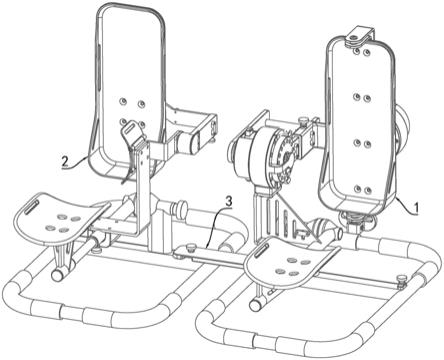
29.图1是本发明创造的立体结构示意图;
30.图2是本发明创造的患侧康复装置的结构示意图;
31.图3是本发明创造的患侧康复装置的剖面结构示意图;
32.图4是本发明创造的图3中“a”处的放大结构示意图;
33.图5是本发明创造的患侧康复装置的爆炸结构示意图之一;
34.图6是本发明创造的患侧康复装置的爆炸结构示意图之二;
35.图7是本发明创造的健侧康复装置的结构示意图;
36.图8是本发明创造的健侧康复装置的爆炸结构示意图之一;
37.图9是本发明创造的健侧康复装置的爆炸结构示意图之二;
38.图10是本发明创造的万向节的剖面结构示意图;
39.图11是本发明创造的患者的使用状态的结构示意图;
40.图12是本发明创造的踝关节背伸和跖屈的结构示意图;
41.图13是本发明创造的踝关节内旋和外旋的结构示意图;
42.图14是本发明创造的踝关节外翻和内翻的结构示意图;
43.图中:1-患侧康复装置、2-健侧康复装置、3-连接板、4-患者、11-第一落地架、12-第一角度调节机构、13-第一腿托架、14-第一驱动装置、15-第一支架、16-第二驱动装置、17-第二支架、18-第三支架、19-传动件、20-第一足托架、21-第二落地架、22-第二角度调节机构、23-第四支架、24-万向节、25-第二足托架、26-第二腿托架、41-健侧、42-患侧、43-踝关节、431-足部、432
‑ꢀ
小腿、111-第一落地框、121-第一转轴、122-第一套管、123-第一端面齿轮、 124-第二端面齿轮、125-第三连接件、1211-第三螺纹孔、131-第一腿托板、132
‑ꢀ
第一管体、133-第一杆体、134-第一连接件、1321-第一螺纹孔、151-第一支撑杆、152-第一滑套、153-第二连接件、1521-第二螺纹孔、191-第一连杆、192
‑ꢀ
第二连杆、193-第三连杆、194-第一端盖、195-第二端盖、1911-第一轴肩、1921
‑ꢀ
第一轴孔、1922-第二轴孔、1931-第二轴肩、211-第二落地框、221-第二转轴、 222-第二套管、223-第三端面齿轮、224-第四端面齿轮、225-第五连接件、2211
‑ꢀ
第五螺纹孔、241-第一构件、242-第二构件、243-第三构件、261-第二支撑杆、 262-第二滑套、263-第四连接件、2621-第四螺纹孔、264-第二腿托板。
具体实施方式
44.为了便于本领域技术人员的理解,下面结合附图和具体实施例对本发明创造作进一步描述。
45.如图11至图14所示,踝关节43指的是人体的小腿431和足部432之间的关节。踝关节43的运动包括跖屈、背伸、内旋、外旋、内翻和外翻等。若足部 432和小腿431近乎垂直并且足部432并未向左或向右摆动、翻转时,踝关节 43处于自然状态,该自然状态一般被称为中立位。若踝关节43跖屈时,足部 432向下偏离中立位的极限角度约为40-50
°
。若踝关节43背伸时,足部432 向上偏离中立位的极限角度约为20-30
°
。若踝关节43内旋时,足部432向内偏离中立位的极限角度约为8
°
。若踝关节43外旋时,足部432向外偏离中立位的极限角度约为85
°
。若踝关节43内翻时,足部432向内偏离中立位的极限角度约为30
°
。若踝关节43外
翻时,足部432向外偏离中立位的极限角度约为 30-35
°
。
46.需要说明的是,踝关节43在正常活动时,不仅可以单独进行跖屈、背伸、内旋、外旋、内翻和外翻的动作,而且还可以在跖屈-背伸自由度、内旋-外旋自由度和内翻-外翻自由度中至少两个自由度结合的动作。例如,踝关节43在进行内旋时还可以进行内翻,踝关节43在进行外旋时还可以进行外翻。
47.而现有技术中公开的一种三自由度踝关节辅助运动外骨骼中,通过对x轴电机、y轴电机和z轴电机的旋转角度控制,可分别驱动外骨骼辅助患者的踝关节背屈/跖屈、内翻/外翻和内旋/外旋三个自由度的进行单独控制,为了实现上述多个自由度的协同动作,需要多个电机共同参与控制,这就导致了控制复杂、难以规划出明确和符合人体运动工程学的控制方式,而且多个电机单独控制的方式还导致结构复杂和成本高的问题。另外,患者由于长期卧床的原因,其健侧的踝关节和肌肉长期也无法正常活动,也需要适当的康复训练。
48.如图1至图10所示,是本发明创造实施例提供的一种踝关节的康复机器人,包括患侧康复装置1和健侧康复装置2。患侧康复装置1用于辅助患侧42踝关节43的康复运动,健侧康复装置2用于辅助健侧41踝关节43的康复运动。
49.患侧康复装置1包括第一落地架11、第一腿托架13、第一足托架20、第一支架15、第二支架17、第三支架18,第一驱动装置14、第二驱动装置16和传动件19。
50.在实际使用中,第一落地架11可落地放置在地面上,使得本踝关节的康复机器人可落地使用。
51.具体地,第一落地架11包括第一落地框111,第一落地框111的整体结构呈矩形的框体。若第一落地架11落地放置在地面上时,第一落地框111设置在地面上,提高了支撑的稳定性。
52.第一腿托架13设置在第一落地架11上,用于固定患侧42的小腿431。在实际使用中,第一腿托架13可通过绑带绑紧在患侧42的小腿431上。
53.具体地,第一腿托架13包括第一腿托板131,第一腿托板131上形成有弧形面,患者4的小腿431可适配在第一腿托板131的弧形面上,提高了小腿431 和第一腿托板131之间定位的牢固性,也提高了第一腿托板131对小腿431承托的舒适性。
54.第一腿托架13还包括第一长度调节机构,第一长度调节机构设置在第一腿托板131和第一支架15之间,用于调节第一腿托板131和第一支架15上的第一足托架20之间的距离,第一长度调节机构可伸长或缩短,从而可调节第一腿托板131和第一支架15之间的距离。在实际使用中,若第一长度调节机构伸长或缩短时,第一腿托板131和第一支架15上的第一足托架20之间的距离也增大或减小,使得不同体格的患者4均可以舒适地穿戴患侧康复装置1,提高了本患侧康复装置1的适用范围。
55.第一长度调节机构包括第一管体132、第一杆体133和第一连接件134,第一杆体133滑动设置在第一管体132内,第一连接件134可拆卸设置在第一杆体133和第一管体132之间,若第一连接件134从第一杆体133或第一管体132 上拆分时,第一杆体133可在第一管体132内自由滑动。
56.具体地,第一连接件134为螺钉,第一管体132上开设有第一螺纹孔1321,第一连接件134螺纹连接在第一螺纹孔1321内,第一连接件134的一端压紧在第一杆体133上。若第一连接件134在第一螺纹孔1321内拧动时,第一连接件 134可松开在第一杆体133上。
57.第一腿托板131固定设置在第一杆体133上,第一支架15铰接在第一管体 132上。若第一杆体133伸出或收缩在第一管体132内时,第一腿托板131和第一支架15上的第一足托架20之间的距离可增大或减小。
58.第一落地架11和第一腿托架13之间设置有第一角度调节机构12,第一角度调节机构12用于调节第一腿托架13在第一落地架11上的角度。在实际使用中,第一腿托架13在第一落地架11上的角度可增大或减小,使得患者4可以不同姿势使用本患侧康复装置1,例如,患者4可坐在座椅上或躺在床上使用该患侧康复装置1,提高了使用方式的多样性。
59.第一角度调节机构12包括第一转轴121、第一套管122、第一端面齿轮123、第二端面齿轮124和第三连接件125,第一端面齿轮123固定设置在第一转轴 121上,第二端面齿轮124固定设置在第一套管122上,第一转轴121穿设于第一套管122,第三连接件125可拆卸设置在第一转轴121上,第一端面齿轮123 和第三连接件125分别设置在第一套管122的两端,第三连接件125将第一转轴121轴向固定在第一套管122上,第一端面齿轮123啮合在第二端面齿轮124 上,从而将第一转轴121周向固定在第一套管122上。
60.若第三连接件125松开在第一转轴121上时,第一转轴121可在第一套管 122的轴向上滑动,第一端面齿轮123可脱离第二端面齿轮124,第一转轴121 可绕第一套管122进行转动。若第一转轴121绕第一套管122转动时,第一腿托架13和第一落地架11之间的角度增大或减小。在实际使用中,若第一腿托架13调节在第一落地架11上的角度调节至所需角度时,将第一连接件134拧紧在第一转轴121上,第一端面齿轮123啮合在第二端面齿轮124上,从而第一腿托架13定位在第一落地架11上。
61.具体地,第三连接件125也为螺钉,第一转轴121上开设有第三螺纹孔1211,第三连接件125螺纹连接在第三螺纹孔1211内,第三连接件125压紧在第一套管122的一端。若第三连接件125在第三螺纹孔1211内拧动时,第三连接件125 可松开第一套管122。第一管体132固定设置在第一转轴121上,第一落地架 11固定设置在第一套管122上。
62.第一足托架20用于固定患侧42的足部432。在实际使用中,患侧42的足部432可通过绑带固定设置在第一足托架20上。具体地,第一足托架20的整体结构呈板状,提高了第一足托架20对患侧42的足部432的承托效果。
63.第一足托架20通过第一支架15铰接在第一腿托架13上,第一支架15可在第一腿托架13上前后转动。在实际使用中,若第一支架15在第一腿托架13 上前后转动时,可带动患侧42的踝关节43跖屈或背伸。
64.第一驱动装置14传动连接在第一支架15上,用于带动第一支架15在第一腿托架13上前后转动。
65.具体地,第一驱动装置14为电机,第一支架15通过第一驱动装置14铰接在第一腿托架13上,第一驱动装置14固定设置在第一管体132上,第一支架 15固定设置在第一驱动装置14的机轴上。
66.第一足托架20通过第二支架17铰接在第一支架15上,第二支架17可在第一支架15上左右旋转。在实际使用中,若第二支架17在第一支架15上左右旋转时,可带动患侧42的踝关节43内旋或外旋。
67.第二驱动装置16传动连接在第二支架17上,用于带动第二支架17在第一支架15上左右旋转。
68.具体地,第二驱动装置16为电机,第二支架17通过第二驱动装置16铰接在第一支架15上,第二驱动装置16固定设置在第一支架15上,第二支架17 固定设置在第二驱动装置16的机轴上。
69.第一支架15包括第二长度调节机构,第二长度调节机构设置在第一腿托架 13和第三支架18之间,第二长度调节机构用于调节第一腿托架13和第三支架 18之间的距离。在实际使用中,若第一腿托架13和第三支架18之间的距离增大或减小时,第一腿托板131和第一足托架20之间的距离增大或减小,使得不同体格的患者4均可以舒适地穿戴患侧康复装置1,提高了本患侧康复装置1的适用范围。
70.第二长度调节机构包括第一支撑杆151、第一滑套152和第二连接件153,第一滑套152套设在第一支撑杆151上,第二连接件153可拆卸设置在第一支撑杆151和第一滑套152之间,若第二连接件153从第一支撑杆151或第一滑套152上拆分时,第一滑套152可在第一支撑杆151上自由滑动。
71.具体地,第二连接件153为螺钉,第一滑套152上开设有第二螺纹孔1521,第二连接件153螺纹连接在第二螺纹孔1521内,第二连接件153的一端压紧在第一支撑杆151上。若第二连接件153在第二螺纹孔1521内拧动时,第二连接件153可松开在第一支撑杆151上。
72.第一支撑杆151的整体结构呈杆状,第一支撑杆151固定设置在第一驱动装置14的机轴上,第一滑套152固定设置在第二驱动装置16上。
73.第一足托架20通过第三支架18铰接在第二支架17上,第一足托架20固定设置在第三支架18上,第三支架18可在第二支架17上左右翻转。在实际使用中,若第三支架18在第二支架17上左右翻转时,可带动患侧42的踝关节43 内翻或外翻。
74.具体地,第三支架18的整体结构、第二支架17的整体结构均为“u”字型的板状,第三支架18设置在第二支架17内,第三支架18的一端铰接在第二支架17的一端,第三支架18的另一端铰接在第二支架17的另一端,提高了结构的合理性。
75.传动件19连接在第一支架15和第三支架18之间,第一支架15、第二支架 17、第三支架18和传动件19构成空间连杆机构,若第二支架17在第一支架15 上左右旋转时,可带动第三支架18在第二支架17上左右翻转。在实际使用中,若第二支架17带动患侧42的踝关节43内旋时,还通过第三支架18带动患侧 42的踝关节43内翻;若第二支架17带动患侧42的踝关节43外旋时,还通过第三支架18带动患侧42的踝关节43外翻。
76.第一支架15在第一腿托架13上转动的方向、第二支架17在第一支架15 上旋转的方向和第三支架18在第二支架17上翻转的方向两两之间相互垂直。
77.在本发明创造中,第一支架15、第二支架17、第三支架18和传动件19构成空间连杆机构,使得第二支架17在第一支架15上的左右旋转和第三支架18 在第二支架17上的左右翻转构成联动,第二驱动装置16带动第二支架17在第一支架15上左右旋转时,还带动第三支架18在第二支架17上左右翻转,单个第二驱动装置16即可实现患侧42踝关节43在内旋-外旋自由度和内翻-外翻自由度上的协同动作,通过对空间连杆机构的设计即可设计出符合人体运动工程学的控制方式,因此本发明创造具有控制简单、便于设计、结构精简、成本低廉和康复效果好的优点。
78.所述传动件19包括第一连杆191、第二连杆192和第三连杆193,第一连杆191固定设置在第一支架15上,第一连杆191可转动和滑动地设置在第二连杆192上,第三连杆193可
转动和滑动地设置在第二连杆192上,第三连杆193 还铰接在第三支架18上,第三连杆193在第三支架18上的转动方向和第一支架15在第一腿托架13上的转动方向一致。
79.具体地,第一连杆191通过第二驱动装置16固定设置在第一支架15上,第一连杆191固定设置在第二驱动装置16上。
80.所述第一连杆191包括第一轴肩1911,第三连杆193包括第二轴肩1931,第二连杆192上分别开设有第一轴孔1921和第二轴孔1922,第一轴孔1921的轴向和第二轴孔1922的轴向相互垂直,第一轴肩1911的横截面、第二轴肩1931 的横截面、第一轴孔1921的横截面和第二轴孔1922的横截面均为圆形,第一轴肩1911设置在第一轴孔1921内,第二轴孔1922设置在第二轴孔1922内。第一轴肩1911适配在第一轴孔1921内,第一轴肩1911可在第一轴孔1921的轴向上滑动,还可以绕第一轴孔1921进行转动。第二轴肩1931适配在第二轴孔1922内,第二轴肩1931可在第二轴孔1922的轴向上滑动,还可以绕第二轴孔1922进行转动。
81.所述第一轴孔1921和第二轴孔1922均为盲孔,第二连杆192上可拆卸设置有第一端盖194和第二端盖195,第一端盖194和第二端盖195可通过螺栓连接的方式固定在第二连杆192上,第一连杆191穿设于第一端盖194,第一端盖 194设置在第一轴孔1921的外端,第一端盖194将第一轴肩1911限位在第一轴孔1921内,第二连杆192穿设于第二端盖195,第二端盖195设置在第二轴孔1922的外端,第二端盖195将第二轴肩1931限位在第二轴孔1922内。
82.第一连杆191的整体结构呈“一”字型,第一轴肩1911设置在第一连杆191 的一端,第二连杆192的整体结构呈“l”字型,第一轴孔1921和第二轴孔1922 设置在第二连杆192的两端,第三连杆193的整体结构呈“一”字型,第二轴肩1931设置在第三连杆193的一端。
83.健侧康复装置2包括第二落地架21、第二腿托架26、第四支架23、万向节 24和第二足托架25。
84.在实际使用中,第二落地架21可落地放置在地面上,使得本健侧康复装置 2可落地使用。
85.具体地,第二落地架21包括第二落地框211,第二落地框211的整体结构呈矩形的框体。若第二落地架21落地放置在地面上时,第二落地框211设置在地面上,提高了支撑的稳定性。
86.第二腿托架26设置在第二落地架21上,用于固定健侧41的小腿431。在实际使用中,第二腿托架26可通过绑带绑紧在健侧41的小腿431上。
87.具体地,第二腿托架26包括第二腿托板264,第二腿托板264上形成有弧形面,患者4的小腿431可适配在第二腿托板264的弧形面上,提高了小腿431 和第二腿托板264之间定位的牢固性,也提高了第二腿托板264对小腿431承托的舒适性。
88.第二落地架21和第二腿托架26之间设置有第二角度调节机构22,第二角度调节机构22用于调节第二腿托架26在第二落地架21上的角度,第二角度调节机构22的整体结构和第一角度调节机构12的整体结构一致。在实际使用中,第二腿托架26在第二落地架21上的角度可增大或减小,使得患者4可以不同姿势使用本健侧康复装置2,例如,患者4可坐在座椅上或躺在床上使用该健侧康复装置2,提高了使用方式的多样性。
89.第二角度调节机构22包括第二转轴221、第二套管222、第三端面齿轮223、第四端面齿轮224和第五连接件225,第三端面齿轮223固定设置在第二转轴 221上,第四端面齿轮
224固定设置在第二套管222上,第二转轴221穿设于第二套管222,第五连接件225可拆卸设置在第二转轴221上,第三端面齿轮223 和第五连接件225分别设置在第二套管222的两端,第五连接件225将第二转轴221轴向固定在第二套管222上,第三端面齿轮223啮合在第四端面齿轮224 上,从而将第二转轴221周向固定在第二套管222上。
90.若第五连接件225松开在第二转轴221上时,第二转轴221可在第二套管 222的轴向上滑动,第三端面齿轮223可脱离第四端面齿轮224,第二转轴221 可绕第二套管222进行转动。若第二转轴221绕第二套管222转动时,第二腿托架26和第二落地架21之间的角度增大或减小。在实际使用中,若第二腿托架26调节在第二落地架21上的角度调节至所需角度时,将第五连接件225拧紧在第二转轴221上,第三端面齿轮223啮合在第四端面齿轮224上,从而第二腿托架26定位在第二落地架21上。
91.具体地,第五连接件225也为螺钉,第二转轴221上开设有第五螺纹孔2211,第五连接件225螺纹连接在第五螺纹孔2211内,第五连接件225压紧在第二套管222的一端。若第五连接件225在第五螺纹孔2211内拧动时,第五连接件225 可松开第二套管222。第二支撑杆261固定设置在第二转轴221上,落地架固定设置在第二套管222上。
92.第二足托架25用于固定健侧41的足部432。在实际使用中,健侧41的足部432可通过绑带固定设置在第二足托架25上。具体地,第二足托架25的整体结构呈板状,提高了第二足托架25对健侧41的足部432的承托效果。
93.第二足托架25通过第四支架23铰接在第二腿托架26上,第四支架23可在第二腿托架26上前后转动。在实际使用中,若第四支架23在第二腿托架26 上前后转动时,可带动健侧41的踝关节43跖屈或背伸。
94.第二腿托架26包括第三长度调节机构,第三长度调节机构和第二长度调节机构结构一致,第三长度调节机构设置在第二腿托板264和第四支架23之间,第三长度调节机构可伸长或缩短,从而可调节第二腿托板264和第四支架23之间的距离。在实际使用中,若第三长度调节机构伸长或缩短时,第二腿托板264 和第四支架23上的第二足托架25之间的距离也增大或减小,使得不同体格的患者4均可以舒适地穿戴健侧康复装置2,提高了本健侧康复装置2的适用范围。
95.第三长度调节机构包括第二支撑杆261、第二滑套262和第四连接件263,第二滑套262套设在第二支撑杆261上,第四连接件263可拆卸设置在第二滑套262和第二支撑杆261之间,若第四连接件263从第二滑套262或第二支撑杆261上拆分时,第二滑套262可在第二支撑杆261的长度方向上自由滑动。
96.具体地,第四连接件263为螺钉,第二滑套262上开设有第四螺纹孔2621,第四连接件263螺纹连接在第四螺纹孔2621内,第四连接件263的一端压紧在第二支撑杆261上。若第四连接件263在第四螺纹孔2621内拧动时,第四连接件263可松开在第二支撑杆261上。
97.第二腿托架26铰接在第二滑套262上,万向节24设置在第二支撑杆261 上。若第二滑套262在第二支撑杆261上滑动时,第二腿托板264和第二足托架25之间的距离可增大或减小。
98.第二足托架25通过万向节24连接在第四支架23上,第二足托架25可通过万向节24在第四支架23上进行左右偏转和左右翻转。在实际使用中,若第二足托架25在第四支架23上左右偏转和左右翻转时,可实现健侧41的踝关节43内旋、外旋、内翻和外翻的动作。
99.在本发明创造中,健侧41的踝关节43可在健侧康复装置2上进行康复锻炼,健侧康复装置2可限定健侧41踝关节43的转动角度,避免健侧41发生扭伤、拉伤等问题,因此本发明创造具有可健侧41和患侧42同时锻炼、安全系数高的优点。
100.所述万向节24包括第一构件241、第二构件242和第三构件243,第一构件241固定设置在第四支架23上,第三构件243固定设置在第二足托架25上,第二构件242铰接在第一构件241上,第二构件242还铰接在第三构件243上,第一构件241在第二构件242上的转动方向和第三构件243在第二构件242上的转动方向相互垂直,从而实现第二足托架25可通过万向节24在第四支架23 上进行偏转和翻转。
101.第一落地架11和第二落地架21并排设置在一起,第一落地架11和第二落地架21之间设置有连接板3,连接板3的一端可螺栓连接在第一落地架11上,连接板3的另一端可螺栓连接在第二落地架21上,符合人体工程学的设计,提高了使用的舒适性。
102.上述实施例仅为本发明创造的较佳实施例,并非依此限制本发明创造的保护范围,故:凡依本发明创造的结构、形状、原理所做的等效变化,均应涵盖于本发明创造的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1