一种多自由度后装治疗装置
1.本实用新型属于近距离放射治疗技术领域,具体涉及到一种多自由度后装治疗装置。
背景技术:
2.后装近距离治疗技术目前在头颈部肿瘤、乳腺癌、肺癌、前列腺癌、妇科肿瘤以及软组织肿瘤等方面已有较广泛应用,主要采用外照射后局部推量或近距离单独应用模式,在适应症选择合适的情况下,疗效非常显著。
3.后装治疗机即近距离后装治疗机,是使用放射核素产生的射束治疗肿瘤的设备。它的功能是近距离放射治疗,被广泛应用于宫颈癌、前列腺癌、乳腺癌和皮肤癌的治疗,也同样适用于许多其他部位的肿瘤治疗。目前使用的后装机治疗头只有升降功能,对一些特殊部位的治疗由于施源器导管的角度过大,在治疗过程中容易导致放射源不能顺利通过或卡源等问题。在治疗过程中施源器导管过长增加了施源器通过导管的时间,从而导致患者受到不必要的额外辐射剂量,同时也增加了放射源卡源发生的概率。
技术实现要素:
4.本实用新型的目的是提供一种多自由度后装治疗装置,通过设置多方向的自由度,治疗头和患者体表施源器的距离可以达到最近,也可以保障放射源经过的路径平滑。可以实现四个自由度的运动,能够满足人体不同部位和角度施源器对后装机的要求。
5.为达上述目的,本实用新型所采用的技术方案是:提供一种多自由度后装治疗装置,包括底座和机械部件,机械部件包括依次转动连接的机械臂a、关节a、机械臂b以及关节b,关节b转动连接有施源部件和驱动部件,底座上转动连接有转盘,底座内部设置有控制系统,转盘的旋转方向为水平旋转;转盘上通过连接件与机械臂a连接,机械臂a的旋转方向为水平旋转;
6.其中施源部件包括依次连接的储源罐、源通道以及治疗头,施源部件、控制系统和驱动部件均电性连接。
7.采用上述方案的有益效果是:本实用新型提供的是一种可以用于后装近距离治疗手术中的手术装置,包括可以提供支撑力的底座,以及底座上的机械部件,机械部件是可以将出源的相关部件连接和移动的结构。模拟人体的构造,得到依次转动连接的机械臂a、关节a、机械臂b以及关节b,其中机械臂a与关节a的活动可以参考五轴关节型机器人手臂的肘转运动,也就是实现整个机械部件的上下和左右运动;机械臂b以及关节b的活动可以参考五轴关节型机器人手臂的偏转运动,也就是说关节b可以实现施源部件(储源罐)的旋转运动。关节b转动连接有施源部件和驱动部件,驱动部件可以驱动施源部件施放放射源。底座上设置有转盘,通过控制系统控制旋转,转盘在底座上旋转可以带动机械部件旋转,以底座的中心为坐标原点,底座的直径方向为x轴和y轴,以底座垂直方向上的对称轴为z轴作为坐标系定位的话,可以理解为转盘在z轴方向做旋转运动。因此本实用新型可以实现上下运
动、左右运动、垂直方向旋转以及左右方向的旋转运动。
8.施源部件包括依次连接的储源罐、源通道以及治疗头,施源部件、控制系统和驱动部件均电性连接。控制系统包括控制器等常规部件,其中控制器可以是欧姆龙cp1h-x40dt-d型plc控制器。储源罐作为储存放射源的结构,治疗头为与患者接触的结构,控制系统控制驱动部件将储源罐中的放射源从源通道发射到治疗头,可以对患者进行治疗。其中治疗头可以连接多个输源管、施源器。储源罐内只装一个放射源,通过治疗头的引导控制,放射源可依次通过相应管道达到治疗区,按计划实施治疗。
9.进一步地,连接件包括设置于转盘上的滑轨,滑轨两端设置有固定标。
10.采用上述方案的有益效果是:机械臂a可以通过滑轨在转盘上滑动,增加机械部件的移动范围。
11.进一步地,驱动部件包括电性连接的步进电动机、驱动器和连接电线。
12.进一步地,关节a和关节b的结构为机械手关节结构,机械臂a和机械臂b的动力系统均为驱动电机,其中,机械臂a的驱动电机设置于转盘内部,机械臂b的驱动电机设置于机械臂a内部,机械臂a通过传动轴与关节a、机械臂b连接,机械臂b通过传动轴与关节b连接,驱动电机均与控制系统电性连接。
13.进一步地,底座内部设置有旋转电机,旋转电机与控制系统电性连接。
14.进一步地,源通道与储源罐以及治疗头均设置有锁紧机构,包括锁紧盘和锁紧把手。
15.采用上述方案的有益效果是:治疗头内有锁紧盘,当插好施源器插管后,转一下锁紧把手,则所有施源器与后装机相连端即被卡死,不可能脱落,这样就可以避免治疗过程中施源器插管从后装机上脱落造成放射源外露事故发生。
16.进一步地,储源罐表层设置有外套结构,内层材质为金属铅,储源罐中心嵌设有具有弯曲通道的钨合金防护块,钨合金防护块内部穿设有管道。
17.采用上述方案的有益效果是:储源罐的主要作用是停止治疗时存放放射源,屏蔽放射源的射线,减少射线对医护人员辐照。外套结构主要起支撑作用,钨合金防护块主要起防护作用,管道用于存放放射源或模拟源,可以达到近距离放射治疗机的防护安全要求。
18.进一步地,治疗头的形状为圆筒状,治疗头的前端设置有分度盘。
19.综上所述,本实用新型具有以下优点:
20.1、本实用新型通过设置双机械臂和双关节的结构,可以实现机械部件的旋转运动,匹配最合适的手术机位,减少手术时间;
21.2、本实用新型通过设置底座和转盘的结构,可以使整个机械部件以及出源的部件等在竖直方向上的旋转,旋转角度为360
°
,大大提高了多自由度后装治疗装置的灵活性和可变性;
22.3、本实用新型的结构可以缩减常规施源器导管的距离,进而减少了放射源在路径中的时间,降低患者受到的额外辐射剂量;由于放射源经过的路径平滑,进而减小了卡源事件发生的可能。
附图说明
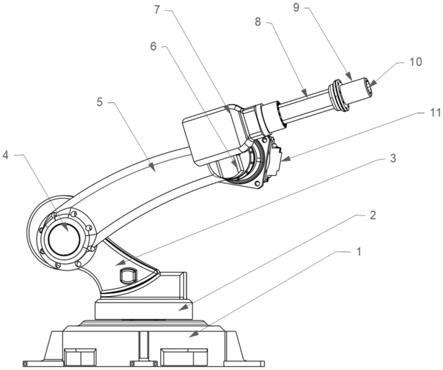
23.图1为本实用新型的侧视图;
24.图2为本实用新型的俯视图;
25.图3为本实用新型的正视图;
26.其中,1、底座;2、转盘;3、机械臂a;4、关节a;5、机械臂b;6、关节b;7、储源罐;8、源通道;9、治疗头;10、分度盘;11、驱动部件。
具体实施方式
27.下面结合附图对本实用新型的具体实施方式做详细的说明。
28.本实用新型的一个实施例中,如图1-3所示,提供了一种多自由度后装治疗装置,包括放置于地面或平稳结构上的底座1,底座1可以通过均匀的螺栓固定。底座1的结构为圆柱形,在其表面设置有一个转盘2,底座1内部设置有旋转电机和控制系统,控制系统可以是一个控制器,可以是单片机,也可以是芯片,主要用于控制旋转电机进而可以驱动转盘2在底座1上做360
°
的旋转运动。
29.在本发明的一个优选的实施例中,转盘2上设置有滑轨,滑轨两端设置固定标,可以防止滑出滑轨外部。滑轨再连接有机械臂a 3,机械臂a 3的驱动电机设置于转盘2内部,并且与控制系统电性连接;机械臂a 3通过关节a 4连接有机械臂b 5,机械臂a 3内部设置有机械臂b 5的驱动电机,同时与控制系统电性连接;机械臂b 5再通过关节b 6与储源罐7和驱动电机转动连接,其中关节a 4和关节b 6内部均设置有传动轴,驱动电机是储源罐7的动力系统,通过控制系统的指令进而控制放射源的发射。
30.其中,储源罐7外部的表层设置有外套结构,内层材质为金属铅,储源罐7中心嵌设有具有弯曲通道的钨合金防护块,钨合金防护块内部穿设有管道。储源罐7通过源通道8连接有治疗头9,治疗头9的前端设置有分度盘10,分度盘10可以连接多个输源管、施源器,配合治疗头9的引导作用可以使放射源依次通过相应的管道输送。源通道8与储源罐7以及治疗头9均设置有锁紧机构,包括锁紧盘和锁紧把手。当插好施源器插管后,转一下锁紧把手,则所有施源器与后装机相连端即被卡死,不可能脱落,这样就可以避免治疗过程中施源器插管从后装机上脱落造成放射源外露事故发生。
31.在本发明的另一个较佳的实施例中,机械臂a与机械臂b中不设置驱动电机,关节a 4和关节b 6的内部设置有分别控制机械臂b 5以及施源部件转动的驱动电机,施源部件可以围绕关节b 6做旋转运动。
32.使用方法:将多自由度后装治疗装置固定于底面,根据患者位置调节各个关节和机械臂的位置,使其达到最佳的施入部位,投入放射源,打开驱动电机,放射源从储源罐7中稳定输出,经过源通道8从治疗头9到达治疗部位。在手术过程中可以根据转盘2、机械臂a 3、关节a 4、机械臂b 5、关节b 6的作用驱动整个装置的旋转运动,包括左右运动、上下运动、垂直方向旋转以及左右方向旋转运动,能够满足人体不同部位和角度施源器对后装机的要求。
33.虽然结合附图对本实用新型的具体实施方式进行了详细地描述,但不应理解为对本专利的保护范围的限定。在权利要求书所描述的范围内,本领域技术人员不经创造性劳动即可作出的各种修改和变形仍属本专利的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1