一种用于CT介入导航机器人的快速夹具的制作方法
一种用于ct介入导航机器人的快速夹具
技术领域
1.本实用新型属于医疗器械技术领域,具体涉及一种用于ct介入导航机器人的快速夹具
背景技术:
2.经皮穿刺介入手术是一种典型的微创手术,是在医学影像(b超、mri和ct等) 的引导下,将手术器械(常用器械有穿刺针、活检针、消融针等)准确置入病人体内器官进行组织提取或治疗。
3.与手动穿刺相比,机器人通过三维路径规划、实时跟踪靶点等技术手段不仅能提高手术操作的精度,而且减少对医生经验的依赖,降低医生的劳动强度,使穿刺介入手术建立在更加科学、可控和具有预见性的基础上。ct介入导航机器人的夹具主要功能是机器人确定好入针位置后,为穿刺针和消融针提供一种支撑,让针能沿着针道进入人体组织,提高手术稳定性和精度。
4.现有ct导航的夹具通常采用丝杠运动的方式,让两个夹爪闭合和张开,需要定期润滑,比较麻烦。同时,针管定位器使用的是硬性塑料,而消融针是非标产品,针直径的误差比较大,这就造成消融针与针管定位器的孔径无法精密配合,针与孔之间存在间隙,影响定位精度。
技术实现要素:
5.本实用新型要解决的技术问题是,克服现有技术中的不足,提供一种用于ct介入导航机器人的快速夹具。
6.为解决技术问题,本实用新型的解决方案是:
7.提供一种用于ct介入导航机器人的快速夹具,包括:安装杆件,包括杆件本体,在其上端部设有用于连接机械臂的法兰盘底座,杆件本体垂直固定在法兰盘底座的中央;快速闭合器,固定在所述杆件本体的下端部;包括闭合器底座和闭合器压盖,两者能够以其表面相对贴合,一侧通过第一转轴活动连接,另一侧设有闭锁结构用于贴合时锁紧;在闭合器底座与闭合器压盖之间设有贯通的限位槽;针管定位器,内部设有用于插入标准穿刺针或消融针的管状通孔,能由快速闭合器夹持在限位槽中。
8.作为一种改进方案,所述法兰盘底座的端面上设有定位销或定位孔。
9.作为一种改进方案,所述杆件本体下端部设有至少两个贯穿杆件本体的螺孔,并由螺钉实现固定安装;或者,带孔夹片与快速闭合器相对布置,杆件本体下端部被夹持在两者之间,并由螺钉实现固定安装。
10.作为一种改进方案,杆件本体下端部的侧面设有平面区域,快速闭合器后侧表面与平面区域贴合;或者,快速闭合器的后侧表面设有定位槽,杆件本体下端部位于定位槽中。
11.作为一种改进方案,所述针管定位器的上端部具有外扩的凸缘,用于限位安装。
12.作为一种改进方案,所述针管定位器具有复合结构,其外层为定位器外管,内部嵌套设有定位器内管。
13.作为一种改进方案,所述针管定位器由两种材料通过二次注塑加工形成复合结构的中空管状结构,其外层为聚碳酸酯材质的定位器外管,内层为医用级硅橡胶材质的定位器内管,定位器内管的腔体直径小于标准穿刺针或消融针的外径。
14.作为一种改进方案,所述快速闭合器的闭锁结构是快装锁杆结构,包括设于闭合器底座或闭合器压盖上的第二转轴,以及相应地设于闭合器压盖或闭合器底座上的限位卡口;螺纹锁杆的一端活动套装在第二转轴上,另一端装有带螺孔的手柄,螺纹锁杆能够嵌入限位卡口中并由手柄实现锁紧。
15.作为一种改进方案,所述快速闭合器的限位槽的截面呈圆形,所述针管定位器呈圆管状,两者径向尺寸相互匹配。
16.作为一种改进方案,在闭合器底座和闭合器压盖的相对表面上分别设有凹槽,当两者闭合时两个凹槽共同组成限位槽;限位槽的形状和径向尺寸与针管定位器的形状和外径尺寸相匹配。
17.与现有技术相比,本发明的有益效果是:
18.1、本实用新型结构简单,快速夹具在旋松螺纹锁杆后即可快速打开闭合器的压盖;可以轻松装入或取出针管定位器,方便操作。
19.2、ct介入导航机器人的机械臂根据手术方案和预设路径运行到指定位置后,只需使用快速闭合器实现对针管定位器的夹持操作,就可以将穿刺针或消融针从针管定位器的圆柱孔中插入进行穿刺操作,因此定位更精准;由于无需手持穿刺针或消融针进行人工定位操作,可以大大提高介入手术的稳定性和精度。
20.3、针管定位器通过二次注塑加工形成复合结构。其外层采用聚碳酸酯,能够保持夹持的稳定性,让针道不会变形;内层的医用级硅橡胶具备一定弹性,能避免金属材质定位器存在的夹持过紧,导致无法进针或夹持过松容易影响定位精度的问题。
21.4、该产品消除了现有夹具所采用的丝杠结构,无需定期润滑,无需后期维护。
附图说明
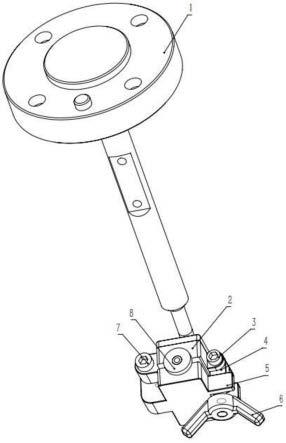
22.图1为本实用新型中快速夹具结构示意图。
23.图2为针管定位器示意图;
24.图3为针管定位器的轴剖图;
25.图4为快速夹具的使用状态示意图;
26.图5为快速夹具的使用状态示意图。
27.图中附图标记:1法兰盘底座;2闭合器底座;3第二转轴;4螺纹锁杆;5闭合器压盖;6手柄;7第一转轴;8针管定位器;8-1定位器外管;8-2定位器内管。
具体实施方式
28.本技术中为部件所编序号本身,例如“第一”、“第二”等,仅用于区分所描述的对象,不具有任何顺序或技术含义。而本技术所说“连接”、“联接”,如无特别说明,均包括直接和间接连接(联接)。在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
29.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
30.如图1所示,用于ct介入导航机器人的快速夹具,包括:安装杆件、快速闭合器和针管定位器;其中,
31.安装杆件,包括杆件本体,在其上端部设有用于连接机械臂的法兰盘底座1,杆件本体垂直固定在法兰盘底座1的中央。与机械臂末端的法兰盘端面的定位孔(或定位销) 相对应,在法兰盘底座1的端面上设有定位销(或定位孔)。
32.快速闭合器固定在所述杆件本体的下端部,包括闭合器底座2和闭合器压盖5,两者能够以其表面相对贴合,且一侧通过第一转轴7活动连接,另一侧设有闭锁结构用于贴合时锁紧;在闭合器底座2与闭合器压盖5之间设有贯通的限位槽;限位槽用于插入针管定位器8。通常情况下,针管定位器的外形呈圆管状,快速闭合器的限位槽的截面呈圆形,两者径向尺寸相互匹配以实现稳固夹持安装。具体地,在闭合器底座2和闭合器压盖5的相对表面上分别设有凹槽,当两者闭合时两个凹槽共同组成限位槽;限位槽的形状和径向尺寸与针管定位器8的形状和外径尺寸相匹配。
33.快速闭合器的闭锁结构可选是快装锁杆结构,包括设于闭合器底座2(或闭合器压盖5)上的第二转轴3,以及相应地设于闭合器压盖5(或闭合器底座2)上的限位卡口;螺纹锁杆4的一端活动套装在第二转轴3上,另一端装有带螺孔的手柄6,螺纹锁杆4 能够嵌入限位卡口中并由手柄6实现锁紧。快速闭合器的闭锁结构也可选择其它形式,例如搭接方式的卡扣结构等。
34.为安装快速闭合器,可以在杆件本体下端部设至少两个贯穿杆件本体的螺孔,并由螺钉经螺孔再旋入闭合器底座2背面的安装孔中,实现固定安装;或者,将带孔夹片与快速闭合器相对布置,杆件本体下端部被夹持在两者之间,并由螺钉经带孔夹片上的安装孔再旋入闭合器底座2背面的安装孔中,实现固定安装。
35.为使快速闭合器安装稳固,可以在杆件本体下端部的侧面设平面区域,闭合器底座 2的后侧表面与平面区域贴合;或者,在闭合器底座2的后侧表面设定位槽,杆件本体下端部位于定位槽中。这样,可以使快速闭合器与杆件本体之间结合更稳固。
36.如图2、3针管定位器8具有复合结构,其外层为定位器外管8-1,上端部具有外扩的凸缘,能由快速闭合器夹持在限位槽中实现限位安装。内层为定位器内管8-2,设有轴向的管状通孔,用于插入标准穿刺针或消融针。例如,针管定位器8可由两种材料通过二次注塑加工形成复合结构的中空管状结构,其外层为聚碳酸酯,内层为邵氏硬度55 的医用级硅橡胶,内管腔体直径小于标准穿刺针或消融针的外径。由于医用级硅橡胶具备一定弹性,能避免金属材质定位器存在的夹持过紧无法进针或夹持过松容易滑落的问题。
37.使用方法说明:
38.先将法兰盘底座1用螺钉固定在ct介入导航机器人的机械臂末端,并通过定位销或定位孔实现定位。
39.手术开始后,ct介入导航机器人根据规划将机械臂末端运动到患者的肿瘤手术区域上方。医生逆时针方向旋转手柄6,松开螺纹锁杆4,打开闭合器压盖5。然后将针管定位器8装入闭合器底座2与闭合器压盖5之间的限位槽处,闭合器压盖5并复位螺纹锁杆4,顺时针旋转手柄6固定住针管定位器8。此时,医生将穿刺针或消融针从针管定位器8的管状通孔中插入(如图4所示)。
40.穿刺手术结束后,逆时针旋转手柄6,松开螺纹锁杆4,打开闭合器压盖5(如图4 所示),医生同时取出针管定位器8和穿刺针后,移走机器人的机械臂即可。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1