微创手术机器人电驱动式触地平衡底座的制作方法
1.本实用新型涉及医疗器械技术领域,尤其是一种微创手术机器人电驱动式触地平衡底座。
背景技术:
2.微创机器人手术系统是集多项现代高科技手段于一体的综合体,其用途广泛,在临床上具有大量的应用。医生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的革命性外科手术工具。
3.微创手术机器人从手重量大,人力推动费力,尤其在手术室窄空间内摆位调整非常不便,调整好位置后如何实现底座平稳迅速地锁地也存在不便。
技术实现要素:
4.本实用新型的目的在于提供一种微创手术机器人电驱动式触地平衡底座,克服前述现有技术的不足,能够省时省力地在手术室窄空间内对微创手术机器人进行摆位调整,位置调整好以后能够迅速实现平稳锁地的功能。
5.本实用新型解决其技术问题所采取的技术方案是:
6.一种微创手术机器人电驱动式触地平衡底座,包括底座框架、行走轮、电动脚轮和能够进行伸缩调节的支撑机构,所述电动脚轮设置于底座框架的中部,所述行走轮设置于框架的下端并分布于电动脚轮的四周,所述支撑机构设置于底座框架的四角处,支撑机构包括电动推杆和与电动推杆连接并通过电动推杆进行伸缩调节的导向支撑组件,电动推杆的电机与电流传感器电性连接;
7.电动脚轮选择德国品牌tente的additional roller,通过此类电动驱动助力装置实现底座框架的灵活移动,电动脚轮设置于底座框架的中部,工作时电动脚轮向下伸出触地,电动脚轮的电机驱动脚轮来实现微创机器人的移动行走;当机器人的位置调整好准备手术时,需要设备处于稳定状态,此时采用底座框架四角处的单控电动推杆推动导向支撑组件触地,随着导向支撑组件接触地面压力增大,电动推杆的电机负载电流增大,电流传感器收到电流变化信号后控制电动推杆的电机断电,以此迅速锁定电动推杆,响应时间更短,控制更精度,高效实现各个电动推杆可靠触地,使整个手术机器人处于平衡状态。
8.进一步的,所述底座框架包括第一矩形管、第二矩形管和安装板,第一矩形管间隔设置,第二矩形管间隔设置于第一矩形管之间,安装板安装于第一矩形管之间或第二矩形管之间;底座框架整体结构简单,设计合理,支撑力度强。
9.进一步的,所述电动推杆的外套管固定于第一矩形管或第二矩形管的内腔;所述导向支撑组件包括支撑杆、上沿、弹簧、导向管、下沿和安装管,所述支撑杆与电动推杆的内杆连接,支撑杆从第一矩形管或第二矩形管的内腔伸出,支撑杆的外壁设置有上沿,上沿的下端与弹簧的上端连接,弹簧的下端与导向管的上端连接,导向管套设于支撑杆的外部,导向管的下端设置有下沿,下沿与套设在导向管外部的安装管下端连接,安装管的上端固定
在第一矩形管或第二矩形管上;
10.电动推杆的内杆伸出时,带动支撑杆下移,由于安装管是固定连接在第一矩形管或第二矩形管上的,因此与安装管固定连接的导向管和下沿的位置均保持固定,支撑杆向下穿出导向管,弹簧受到压缩,在此过程中导向管对支撑杆形成导向的保护作用;电动推杆的内杆收回时,支撑杆在电动推杆的作用以及弹簧复位作用下顺利收回导向管内部。
11.进一步的,所述安装板的两端安装在与其位置相对应的第一矩形管或第二矩形管的下端面上,安装板的板体沿第一矩形管或第二矩形管的外壁向上弯折后向水平弯折,电动脚轮安装在安装板的水平段,该设置方式是由于电动脚轮自身具有一定重量,支撑机构触地支撑后电动脚轮脱离地面,下拉安装板,在此设计下安装板沿第一矩形管或第二矩形管向上弯折的板段能够抵触在第一矩形管或第二矩形管上形成有力支撑,有效防止安装板的损坏。
12.进一步的,所述行走轮设置于底座框架的四角处,行走轮包括万向脚轮和定向脚轮。
13.本实用新型的有益效果是:与现有技术相比,本实用新型的一种微创手术机器人电驱动式触地平衡底座具有以下优点:电动脚轮作为电动驱动助力装置能够实现底座框架的灵活移动,电动脚轮设置于底座框架的中部,工作时电动脚轮向下伸出触地,电动脚轮的电机驱动脚轮来实现微创机器人的移动行走;当机器人的位置调整好准备手术时,需要设备处于稳定状态,此时采用底座框架四角处的单控电动推杆推动导向支撑组件触地,随着导向支撑组件接触地面压力增大,电动推杆的电机负载电流增大,电流传感器收到电流变化信号后控制电动推杆的电机断电,以此迅速锁定电动推杆,响应时间更短,控制更精度,高效实现各个电动推杆可靠触地,使整个手术机器人处于平衡状态。
附图说明
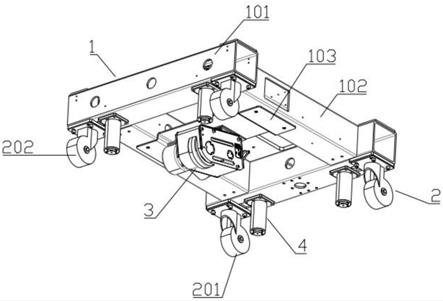
14.图1为本实用新型总体结构示意图;
15.图2为本实用新型安装板和电动脚轮的结构示意图;
16.图3为本实用新型支撑机构的结构示意图;
17.图4为本实用新型支撑机构局部分拆后的结构示意图;
18.其中,1底座框架、101第一矩形管、102第二矩形管、103安装板、2行走轮、201万向脚轮、202定向脚轮、3电动脚轮、4支撑机构、401电动推杆、402支撑杆、403上沿、404弹簧、405导向管、406下沿、407安装管。
具体实施方式
19.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
20.如图1-4所示的实施例中,一种微创手术机器人电驱动式触地平衡底座,包括底座框架1、行走轮2、电动脚轮3和能够进行伸缩调节的支撑机构4,所述电动脚轮3设置于底座框架1的中部,所述行走轮2设置于框架的下端并分布于电动脚轮3的四周,所述支撑机构4设置于底座框架1的四角处,支撑机构4包括电动推杆401和与电动推杆401连接并通过电动推杆401进行伸缩调节的导向支撑组件,电动推杆401的电机与电流传感器电性连接;
21.电动脚轮3选择德国品牌tente的additional roller,通过此类电动驱动助力装置实现底座框架1的灵活移动,电动脚轮3设置于底座框架1的中部,工作时电动脚轮3向下伸出触地,电动脚轮3的电机驱动脚轮来实现微创机器人的移动行走;当机器人的位置调整好准备手术时,需要设备处于稳定状态,此时采用底座框架1四角处的单控电动推杆401推动导向支撑组件触地,随着导向支撑组件接触地面压力增大,电动推杆401的电机负载电流增大,电流传感器收到电流变化信号后控制电动推杆401的电机断电,以此迅速锁定电动推杆401,响应时间更短,控制更精度,高效实现各个电动推杆401可靠触地,使整个手术机器人处于平衡状态。
22.本实施例中,所述底座框架1包括第一矩形管101、第二矩形管102和安装板103,第一矩形管101间隔设置,第二矩形管102间隔设置于第一矩形管101之间,安装板103安装于第一矩形管101之间或第二矩形管102之间;底座框架1整体结构简单,设计合理,支撑力度强。
23.本实施例中,所述电动推杆401的外套管固定于第一矩形管101或第二矩形管102的内腔;所述导向支撑组件包括支撑杆402、上沿403、弹簧404、导向管405、下沿406和安装管407,所述支撑杆402与电动推杆401的内杆连接,支撑杆402从第一矩形管101或第二矩形管102的内腔伸出,支撑杆402的外壁设置有上沿403,上沿403的下端与弹簧404的上端连接,弹簧404的下端与导向管405的上端连接,导向管405套设于支撑杆402的外部,导向管405的下端设置有下沿406,下沿406与套设在导向管405外部的安装管407下端连接,安装管407的上端固定在第一矩形管101或第二矩形管102上;
24.电动推杆401的内杆伸出时,带动支撑杆402下移,由于安装管407是固定连接在第一矩形管101或第二矩形管102上的,因此与安装管407固定连接的导向管405和下沿406的位置均保持固定,支撑杆402向下穿出导向管405,弹簧404受到压缩,在此过程中导向管405对支撑杆402形成导向的保护作用;电动推杆401的内杆收回时,支撑杆402在电动推杆401的作用以及弹簧404复位作用下顺利收回导向管405内部。
25.本实施例中,所述安装板103的两端安装在与其位置相对应的第一矩形管101或第二矩形管102的下端面上,安装板103的板体沿第一矩形管101或第二矩形管102的外壁向上弯折后向水平弯折,电动脚轮3安装在安装板103的水平段,该设置方式是由于电动脚轮3自身具有一定重量,支撑机构4触地支撑后电动脚轮3脱离地面,下拉安装板103,在此设计下安装板103沿第一矩形管101或第二矩形管102向上弯折的板段能够抵触在第一矩形管101或第二矩形管102上形成有力支撑,有效防止安装板103的损坏。
26.本实施例中,所述行走轮2设置于底座框架1的四角处,行走轮2包括万向脚轮201和定向脚轮202。
27.上述具体实施方式仅是本实用新型的具体个案,本实用新型的专利保护范围包括但不限于上述具体实施方式的产品形态和式样,任何符合本实用新型权利要求书且任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应落入本实用新型的专利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1