一种可乘坐手扶电梯的感应轮椅
1.本实用新型涉及日常生活技术领域,具体涉及一种可乘坐手扶电梯的感应轮椅。
背景技术:
2.随着社会的进步与科学技术的急速发展,科学技术的产物越来越丰富应用也越来越广泛,人们的生活也愈加便捷快速,在这种趋势的引导下,我们更应该着眼于服务那些生活不便者,使科技的优势惠及全体人民,最大限度发挥其作用。现在轮椅的使用者越来越广,包括伤者、老人在内的群体出行依然存在很大的不便,并且大部分的直梯不仅空间有限而且等待时间较长,因此如果轮椅可以在手扶电梯上使用就大大便捷了他们的出行。
技术实现要素:
3.针对现有技术中存在的问题,本实用新型提供一种可乘坐手扶电梯的感应轮椅,从而实现了轮椅可以在手扶电梯上的使用。
4.本实用新型是通过以下技术方案来实现:
5.一种可乘坐手扶电梯的感应轮椅,包括轮椅本体1,感应装置、伸缩装置和控制器7;
6.所述控制器7安装在轮椅本体1的底座上;所述控制器7依次连接感应装置和伸缩装置;
7.所述感应装置包括感应器2和红外测距仪3,所述感应器2分别安装在轮椅本体1的前端支架上和后端支架上,所述红外测距仪3安装在轮椅本体1的脚踏板上;
8.所述伸缩装置包括伸缩杆4,所述伸缩杆4分别安装在轮椅本体1上的前端支架的底端和后端支架的底端。
9.优选的,控制器7的一端通过连接线6与红外测距仪3连接,控制器7的另一端通过连接线6依次与感应器2和伸缩杆4连接。
10.优选的,感应器2的一端通过连接线6与红外测距仪3连接,感应器2的另一端通过连接线6与伸缩杆4连接。
11.优选的,感应器2与伸缩杆4之间设有伸缩控制阀门5。
12.优选的,轮椅本体1上还设有电源装置9;所述电源装置9安装在轮椅本体1的底座上。
13.优选的,轮椅本体1的扶手上设有用于控制轮椅整体操作的电源控制按钮8。
14.优选的,感应器2的数量为四组。
15.优选的,红外测距仪3的数量为两组。
16.与现有技术相比,本实用新型具有以下有益的技术效果:
17.本实用新型提供的一种可乘坐手扶电梯的感应轮椅,不仅在出行上解决了做电梯难的问题还丰富了轮椅的使用功能。轮椅上添加一个自动感应的装置,通过感应装置对轮椅前后的重量进行对比在差值较大的情况下说明轮椅处于一个不平稳的状态此时,红外测
距仪可以进行对地的距离测量,将测量值传送给伸缩阀门从而使得轮椅的某一部分起到支撑作用最后保持平稳达到乘坐手扶电梯的目的。红外检测仪在收到感应装置的信号后,开始进行对地距离检测,检测到的距离返回计算装置,若可以保证前后的重量一致,则将数据传送到与支撑装置相连的控制装置。乘轮椅出行的人本就多有不便,即使有直梯但由于轮椅的占地面积大因此并不能很即使的解决这个问题,我们提供的这个装置在很大程度上节省了人力物力。
附图说明
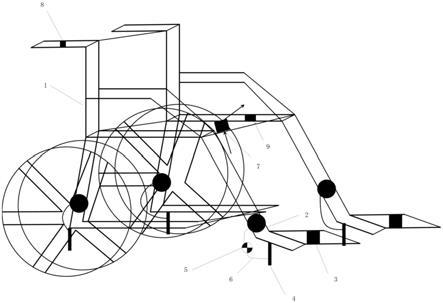
18.图1为本实用新型感应轮椅装置图;
19.图2为本实用新型感应装置的局部图。
20.图中:1轮椅本体,2感应器,3红外测距仪,4伸缩杆,5伸缩控制阀门,6连接线,7控制器,8电源控制按钮,9电源装置。
具体实施方式
21.下面结合具体的实施例对本实用新型做进一步的详细说明,所述是对本实用新型的解释而不是限定。
22.本实用新型为一种可乘坐手扶电梯的感应轮椅,如图2所示,包括,轮椅本体1,感应器2,红外测距仪3,伸缩杆4,伸缩控制阀门5,连接线6,控制器7,电源控制按钮8,电源装置9。
23.包括轮椅本体1,感应装置、伸缩装置和控制器7;控制器7安装在轮椅本体1的底座上;控制器依次连接感应装置和伸缩装置;感应装置包括感应器2和红外测距仪3,感应器2分别安装在轮椅本体1的前端支架上和后端支架上,红外测距仪3安装在轮椅本体1的脚踏板上;伸缩装置包括伸缩杆4,所述伸缩杆4分别安装在轮椅本体1上的前端支架的底端和后端支架的底端。
24.控制器7的一端通过连接线6与红外测距仪3连接,控制器7的另一端通过连接线6依次与感应器2和伸缩杆4连接。
25.所述感应器2的一端通过连接线6与红外测距仪3连接,感应器2的另一端通过连接线6与伸缩杆4连接。
26.所述感应器2与伸缩杆4之间设有伸缩控制阀门5。
27.所述轮椅本体1上还设有电源装置9;所述电源装置9安装在轮椅本体1的底座上。
28.所述轮椅本体1的扶手上设有用于控制轮椅整体操作的电源控制按钮8。
29.所述感应器2的数量为四组。
30.所述红外测距仪3的数量为两组。
31.所述控制器为微型控制器;用于控制轮椅红外测距仪测量对地的距离数据判断在何值时需要伸缩杆伸长,使轮椅前后的重量一致,达到平稳状态。
32.感应装置的具体工作原理:通过对比轮椅前后的承重差距来判断此时轮椅是否处于一个平稳的状态,正常情况下当轮椅在手扶电梯上时,由于电梯阶梯的宽度有限因此无法满足轮椅前后支撑均在一级阶梯上,会出现一侧悬空的情况,此时轮椅前后的重量一定是不一样的,感应装置就在这时向红外测距仪发出信号,使红外测距仪测量对地的距离在
何值时可以时轮椅平稳也就是前后侧的重量一致,此时伸缩装置动作,伸缩杆伸长。
33.感应器2置于轮椅的四个角,将前后两个分为一组与另一侧前后两个进行重量对比,可使用电阻应变式感应器,弹性体在外力的作用下产生弹性形变,使粘贴在它表面的电阻应变片也随着产生形变,电阻片变形后阻值将发生变化,由此产生电信号传送到红外测距仪。
34.红外测距仪3是根据红外线反射的原理研制的,利用红外传感器发射出一束红外光,在照射到地面后形成一个反射的过程,反射后传感器接收到信号,然后利用图像处理接收发射与接收的时间差的数据,经信号处理器处理后计算出物体的距离。在这里我们将红外测距仪3也固定在轮椅的四个角,并使每次使红外垂直地面发射。
35.伸缩杆4的主要是对应红外测距仪测出的距离,阀门打开后伸缩杆达到规定的长度后,测距仪将信号传递给伸缩控制阀门,使阀门关闭。
36.伸缩控制阀门5的本质是开关,目的是控制伸缩杆的动作,伸缩控制阀门固定在轮椅上感应器2与伸缩杆4之间,由固定夹进行固定。
37.感应装置通过检测轮椅前后的重量来判断是否伸长或缩短轮椅的支撑杆,若检测到轮椅前后的承载重量并不相同则考虑启用伸缩杆4。伸缩杆4通过接收感应器2的信息控制支撑轮椅的伸缩4杆,在手扶电梯进行的过程中,伸缩杆4伸长至下一级阶梯来达到轮椅平稳的目的。感应器2将作为控制轮椅伸缩杆4伸缩的信号,如果感应器2感知到轮椅前后重量的变化时,则表明此时应该进行动作保证轮椅在手扶电梯的情况下正常使用,并且这次红外测距仪3也开始工作。红外测距仪3在收到感应器2的信号后,开始进行对地距离检测,检测到的距离传递给控制器的计算装置,若可以保证前后的重量一致,则将数据传送到与伸缩杆相连的伸缩控制阀门5。与伸缩杆4相连的感应器5收到信号后,伸缩杆4进行相应的伸缩动作,伸缩长度则是红外测距仪3已经测量出的结果。与伸缩杆4相连的伸缩控制阀门5在收到动作指令后阀门打开,伸缩杆4发生变化,在达到规定长度后伸缩杆动作,伸缩控制阀门5关闭。伸缩杆4可以通过发生长度变化帮助轮椅在电梯行进的过程中保持平稳。
38.具体的操作步骤如下:
39.在轮椅即将进入手扶电梯时打开位于轮椅手柄上的电源控制按钮8,则感应器3开始工作,开始不断判断轮椅前后的重量,若重量一致则轮椅正常前进不发生动作,若轮椅前后的重量发生变化并且重量差值有不断增大的趋势时感应器将信号发送至红外测距仪3,红外测距仪3开始测量轮椅到地面的距离,并将此距离数值传送到控制器中的计算装置,通过带入此数据判断在此数据下是否能够使轮椅前后重量保持一致,如果得到肯定答案,此时感应器3将距离数据与命令一起送至伸缩控制阀门5,阀门打开,伸缩杆4发生长度变化达到此数值后伸缩控制阀门5关闭。伸缩杆3可以通过发生长度变化帮助轮椅在电梯行进的过程中保持平稳。因此本实用新型的感应器2旨在判断是否需要进行后续动作,其判断依据就是轮椅前后的重量是否一致,如果此时出现较大偏差则开始动作,引入红外测距仪3的目的是判断轮椅在何时可以恢复平稳状态,这是一个连续的过程,因为电梯在进行的过程中平稳状态是保持不变的,但是在上下电梯时,电梯的开始或者结束的部分是没有出现阶梯的,因此红外的工作状态是处于一个过程中的并不是瞬间完成后就结束工作状态的。伸缩杆3依靠伸缩控制阀门5开启和关闭,这是快速的过程同样也是在一个工作过程中的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1