一种基于模块化技术的腕手矫形器
1.本实用新型涉及康复辅助器械技术领域,具体涉及一种基于模块化技术的腕手矫形器。
背景技术:
2.脑卒中、脑外伤、脑炎等中枢神经受损的患者,常表现为手部功能大部分丧失。如脑卒中约70%的患者遗留上肢功能障碍,主要表现为手腕及肌张力下降、手部灵巧性丧失,出现痉挛、关节挛缩、疼痛和水肿等症状。腕、指屈肌痉挛和软组织挛缩导致的屈腕、屈指痉挛在脑卒中患者中十分常见,严重影响脑卒中患者的日常生活和卫生管理,降低患者生活质量。康复辅具在脑卒中偏瘫患者的临床治疗中越来越受到关注,
3.腕手矫形器,作为手功能康复的辅助治疗设备,时常被手康复医生用于在具有手动能障碍的患者身上,以帮助患者手部尽快恢复至正常水平。但现有的大多数腕手矫形器通常存在如下缺点:(1)制备时间长,个性化定制时通常需要测量、取型、制作、修改、正式交付等工序耗时十分漫长;(2)只具备单一功能,缺乏随患者康复状态而改变功能的能力,医师难以对患者康复训练动作做出及时、规范化的指导;(3)缺乏经济性,个性化定制价格昂贵,需要患者承担不小的经济压力。
技术实现要素:
4.(一)要解决的技术问题
5.为了克服现有技术不足,现提出一种基于模块化技术的腕手矫形器,各模块的组件可根据需要更换,可以适应不同的手部矫形要求或是同一疾病的不同康复时期,患者无需花费大量时间在矫形的定制上,各模块间有动态与静态矫形两种模式,在静态矫形后还可进行肌肉的抗阻训练,不仅起到了畸形的矫治还防止了并发症的发生一举多得,各关节见都设计有可调结构可精确的控制矫形器关节与人体关节对齐,提高使用实时性降低矫形器的弃用率。
6.(二)技术方案
7.本实用新型通过如下技术方案实现:本实用新型提出了一种基于模块化技术的腕手矫形器,包括手指模块1、手掌模块2、腕关节模块4、前臂模块和辅助结构,其特征在于:五个所述手指模块1按照实际人体手指排列方式连接于手掌模块2之上,手掌模块2可用手掌处固定带3与患者手部连接,手掌模块2 通过手掌模块2与矫形器腕关节链接与调节结构与腕关节模块4进行连接,腕关节模块4通过前臂模块与腕关节链接调节锁7与前臂模块相连接,所述手指模块1近端与手掌模块2相连接,所述手指模块1包括掌指关节、端指关节、两个跨关节的指关节角度调节杆、两个手指辅助控制弹簧、两个手指夹持装置和两个关节对齐调节杆,两个所述手指夹持装置分别位于手指的指腹及指背,一个位于掌指关节与近端指关节间,一个越过近端指关节的位置,且通过弹簧连接,所述手掌模块2包括远端手指左右调节结构,其内设置有一水平螺纹杆,近端手指模块1的左右与前后调节结构,中部靠桡侧
的拇指固定于角度控制结构,位于边缘的固定带搭扣,所述腕关节模块4包括角度可调的静态腕关节和辅助控制的动态腕关节,两关节两端皆有带刻度的连接杆对应手掌与前臂部分起到链接与微调作用,关节位于人体腕关节的尺侧,所述前臂模块包括三对用固定带卡扣,每对均有适合固定带的开口方便固定带连接,腕关节对齐锁体,所述辅助结构为柔性固定带,所述固定带一头有与矫形器固定带搭扣相对应固定开口,一头为柔性魔术贴。
8.进一步的,所述手指模块1由八条手指夹持弹簧8、四手指夹板9、两组指关节调节螺杆10、两组指关节角度调节螺杆11组成,两组指关节调节螺杆10 使得矫形器机械关节与患者关节相对齐,其次患者将手指放入相应的手指夹板9 内通过手指夹持弹簧8使患者手指持续的受到矫形力作用从而达到矫形的作用,最后通过调节两组指关节角度调节螺杆11来实现患者手指角度的摆放。
9.进一步的,所述手掌模块2由三条柔性手掌处固定带3、四组手指模块1与手掌模块链接与调节结构12、拇指模块与手掌模块链接与调节结构13、一个手掌模块与矫形器腕关节链接与调节结构14、手指模块水平调节螺纹杆15和拇指模块连接基16座组成,所述手指模块1通过手指模块与手掌模块链接与调节结构12与手掌模块2相连接,手指模块1通过手指模块与手掌模块链接与调节结构12与手掌模块2相连接,通过转动手指模块水平调节螺纹杆15使手指模块1 在一定范围内水平移动,可使得矫形器手指模块1在竖直方向上与患者相应手指相对齐。其次可转动手掌模块左右调节螺纹杆22使得手掌模块进一步的与患者手掌在竖直方向上对齐,最后通过调节手掌模块与腕关节链接调节锁7以达到手掌模块2与患者手在水平位置上相对齐。
10.进一步的,所述腕关节模块4具有两种形态分别为静态腕关节和动态腕关节。静态腕关节由静态腕关节调节轴防脱盖、静态腕关节调节轴、静态腕关节调节轴复位弹簧、静态腕关节与手掌模块连接部分、静态腕关节与前臂模块链接部分组成;动态腕关节由动态腕关节与手掌模块连接部分、动态腕关节与前臂模块连接部分、动态腕关节辅助控制弹簧、动态腕关节辅助控制弹簧固定螺丝组成。
11.进一步的,所述前臂模块由前臂支撑壳体5、三条前臂处固定带6、腕关节链接调节锁7组成,患者将前臂放于前臂支撑壳体5内通过三条前臂处固定带6 完成链接,然后根据具体需求安装相应模块。
12.进一步的,所述腕关节链接调节锁7由腕关节链接调节锁锁芯、调节锁锁盖、锁芯复位弹簧、调节锁主体组成,按动锁芯外露于锁部分可以使锁芯在调节锁主体26内上下移动,同时锁芯上的突起部分也跟着改变原有位置,此时锁芯对腕关节不再具有竖直方向上的约束,腕关节可自由移动。
13.(三)有益效果
14.本实用新型相对于现有技术,具有以下有益效果:
15.1.各模块的组件可根据需要更换,可以适应不同的手部矫形要求或是同一疾病的不同康复时期。
16.2.各模块均可进行一定范围的调节,可以适应不同手型的患者,患者无需花费大量时间在矫形的定制上。
17.3.各模块间有动态与静态矫形两种模式,在静态矫形后还可进行肌肉的抗阻训练,不仅起到了畸形的矫治还防止了并发症的发生一举多得。
18.4.各关节见都设计有可调结构可精确的控制矫形器关节与人体关节对齐,提高使用实时性降低矫形器的弃用率。
19.5.各模块间功能执行互不干扰,相互独立的模块可实现对不同部位提供精确的矫形需求。不至于一指受伤全手废用。
附图说明
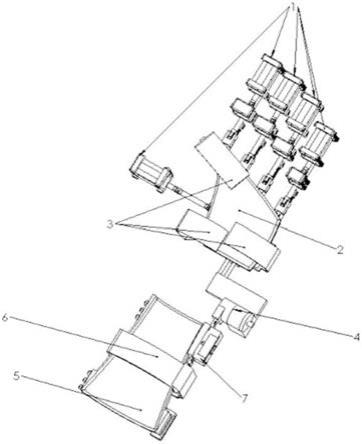
20.图1是本实用新型结构示意图。
21.图2是本实用新型的手指模块结构示意图。
22.图3是本实用新型的手掌模块结构示意图。
23.图4为本实用新型的手指模块与手掌模块链接与调节结构示意图;
24.图5为本实用新型的拇指模块与手掌模块链接与调节结构示意图;
25.图6为本实用新型的手掌模块与矫形器腕关节链接与调节结构示意图;
26.图7为本实用新型的腕关节链接调节锁结构示意图;
27.图8为本实用新型的静态腕关节结构示意图;
28.图9为本实用新型的动态腕关节结构示意图
29.1-手指模块;2-手掌模块;3-手掌处固定带;4-腕关节模块;5-前臂支撑壳体;6-前臂处固定带;7-腕关节链接调节锁;8-手指夹持弹簧;9-手指夹板; 10-指关节调节螺杆;11-指关节角度调节螺杆;12-手指模块与手掌模块链接与调节结构;13-拇指模块与手掌模块链接与调节结构;14-手掌模块与矫形器腕关节链接与调节结构;15-手指模块水平调节螺纹杆;16-拇指模块连接基座; 17-拇指模块链接装置;18-链接固定螺丝;19-拇指模块角度调节螺丝;20-手掌模块左右调节螺纹杆固定盖;22-手掌模块左右调节螺纹杆;23-腕关节链接调节锁锁芯;24-调节锁锁盖;25-锁芯复位弹簧;26-调节锁主体;27-静态腕关节调节轴防脱盖;28-静态腕关节调节轴;29-静态腕关节调节轴复位弹簧; 30-静态腕关节与手掌模块连接部分;31-静态腕关节与前臂模块链接部分;32
‑ꢀ
动态腕关节与手掌模块连接部分;33-动态腕关节与前臂模块连接部分;34-动态腕关节辅助控制弹簧;35-动态腕关节辅助控制弹簧固定螺丝。
具体实施方式
30.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
31.如图1至图9所示的一种基于模块化技术的腕手矫形器,包括手指模块1、手掌模块2、腕关节模块4、前臂模块和辅助结构,其特征在于:五个所述手指模块1按照实际人体手指排列方式连接于手掌模块2之上,手掌模块2可用手掌处固定带3与患者手部连接,手掌模块2通过手掌模块2与矫形器腕关节链接与调节结构与腕关节模块4进行连接,腕关节模块4通过前臂模块与腕关节链接调节锁7与前臂模块相连接,所述手指模块1近端与手掌模块2相连接,所述手指模块1包括掌指关节、端指关节、两个跨关节的指关节角度调节杆、两个手指辅助控制弹簧、两个手指夹持装置和两个关节对齐调节杆,两个所述手指夹持装置分别位于手指的指腹及指背,一个位于掌指关节与近端指关节间,一个越过近端指关节的位置,且
通过弹簧连接,所述手掌模块2包括远端手指左右调节结构,其内设置有一水平螺纹杆,近端手指模块1的左右与前后调节结构,中部靠桡侧的拇指固定于角度控制结构,位于边缘的固定带搭扣,所述腕关节模块4包括角度可调的静态腕关节和辅助控制的动态腕关节,两关节两端皆有带刻度的连接杆对应手掌与前臂部分起到链接与微调作用,关节位于人体腕关节的尺侧,所述前臂模块包括三对用固定带卡扣,每对均有适合固定带的开口方便固定带连接,腕关节对齐锁体,所述辅助结构为柔性固定带,所述固定带一头有与矫形器固定带搭扣相对应固定开口,一头为柔性魔术贴。
32.其中,所述手指模块1由八条手指夹持弹簧8、四手指夹板9、两组指关节调节螺杆10、两组指关节角度调节螺杆11组成;所述手掌模块2由三条柔性手掌处固定带3、四组手指模块1与手掌模块链接与调节结构12、拇指模块与手掌模块链接与调节结构13、一个手掌模块与矫形器腕关节链接与调节结构14、手指模块水平调节螺纹杆15和拇指模块连接基16座组成;所述腕关节模块4 具有两种形态分别为静态腕关节和动态腕关节。静态腕关节由静态腕关节调节轴防脱盖、静态腕关节调节轴、静态腕关节调节轴复位弹簧、静态腕关节与手掌模块连接部分、静态腕关节与前臂模块链接部分组成;动态腕关节由动态腕关节与手掌模块连接部分、动态腕关节与前臂模块连接部分、动态腕关节辅助控制弹簧、动态腕关节辅助控制弹簧固定螺丝组成;所述前臂模块由前臂支撑壳体5、三条前臂处固定带6、腕关节链接调节锁7组成;所述腕关节链接调节锁7由腕关节链接调节锁锁芯、调节锁锁盖、锁芯复位弹簧、调节锁主体组成。
33.本实用新型提到的一种基于模块化技术的腕手矫形器,其在具体使用时,手指模块1按照实际人体手指排列方式连接于手掌模块2,手掌模块2可用手掌处固定带3与患者手部连接,手掌模块2通过手掌模块与矫形器腕关节链接与调节结构14与腕关节4进行连接,腕关节4通过前臂模块与腕关节链接调节锁 7与前臂模块相连接,各个部分链接形成矫形器整体。实际使用时可根据患者实际需求选配不同部件以满足患者个性化需求。
34.一个手指模块1由八条手指夹持弹簧8、四手指夹板9、两组指关节调节螺杆10、两组指关节角度调节螺杆11组成。实际使用时首先调节两组指关节调节螺杆10使得矫形器机械关节与患者关节相对齐,其次患者将手指放入相应的手指夹板9内通过手指夹持弹簧8使患者手指持续的受到矫形力作用从而达到矫形的作用,最后通过调节两组指关节角度调节螺杆11来实现患者手指角度的摆放。
35.手掌模块2由三条柔性手掌处固定带3、四组手指模块与手掌模块链接与调节结构12、一个手掌模块与矫形器腕关节链接与调节结构14、拇指模块连接基座16组成。实际使用时首先手指模块1通过手指模块与手掌模块链接与调节结构12与手掌模块2相连接,通过转动手指模块水平调节螺纹杆15使手指模块1 在一定范围内水平移动,可使得矫形器手指模块1在竖直方向上与患者相应手指相对齐。其次可转动手掌模块左右调节螺纹杆22使得手掌模块进一步的与患者手掌在竖直方向上对齐,最后通过调节手掌模块与腕关节链接调节锁7以达到手掌模块2与患者手在水平位置上相对齐。
36.前臂模块由前臂支撑壳体5、三条前臂处固定带6、前臂模块与腕关节链接调节锁7组成。实际使用时患者将前臂放于前臂支撑壳体5内通过三条前臂处固定带6完成链接,然后根据具体需求安装相应模块。
37.腕关节4具有两种形态分别为静态腕关节和动态腕关节。静态腕关节由静态腕关
节调节轴防脱盖27、静态腕关节调节轴28、静态腕关节调节轴复位弹簧 29、静态腕关节与手掌模块连接部分30、静态腕关节与前臂模块链接部分31组成。实际使用时静态腕关节处于时刻锁定状态,当需要调节腕关节角度时可将静态腕关节调节轴28按下使关节齿和锁定状态变为自由解锁状态,调整好使用角度后撤去外力后静态腕关节调节轴28将在静态腕关节调节轴复位弹簧29的作用下从新将关节锁定,以达到静态矫正的目的。动态腕关节由动态腕关节与手掌模块连接部分32、动态腕关节与前臂模块连接部分33、动态腕关节辅助控制弹簧34、动态腕关节辅助控制弹簧固定螺丝35组成。实际使用时根据患者实际需求选则不同的动态腕关节辅助控制弹簧34以及其安装方向与位置,以达到动态腕关节的辅助患者腕关节屈或伸的需求。
38.手掌模块与腕关节链接调节锁7由腕关节链接调节锁锁芯23、调节锁锁盖 24、锁芯复位弹簧25、调节锁主体26组成。实际使用时按动锁芯外露于锁部分可以使锁芯在调节锁主体26内上下移动,同时锁芯上的突起部分也跟着改变原有位置,此时锁芯对腕关节不再具有竖直方向上的约束,腕关节可自由移动。当矫形器腕关节4与患者腕关节对齐时撤去外力调节锁锁芯23在锁芯复位弹簧 25的作用下复位,锁芯上的突起嵌入腕关节相应的凹陷中完成对腕关节相对于调节锁的位置锁定。
39.前臂模块与腕关节链接调节锁7与手掌模块与腕关节链接调节锁7结构相同不再赘述。
40.功能位和休息位的摆放:当修复损伤的肌肉、调整肌腱张力时,应调整至手的休息位:将腕关节调节至使腕关节背伸10
°‑
15
°
。调整掌指关节及指间关节的屈度使其至半屈位,从示指至小指屈曲度渐大,指端指向舟骨结节方向。当外伤包扎固定时应调整至手的功能位:调整腕关节使腕背伸25
°‑
30
°
,掌指及指间关节微屈,拧动手指近掌端螺纹杆使手指分开。
41.代偿或辅助肌肉功能:如指屈肌肌力减弱,可缩短手指辅助控制弹簧原长,手伸肌放松时呈现自动的屈曲状态,此时指伸肌功能未受限。用弹簧的弹力来辅助肌肉功能活动促进肌肉和神经恢复,同时还能防止肌肉和肌腱的萎缩。
42.降低肌张力和抑制痉挛:例如在脑卒中brunnstrom(布伦斯特伦)手功能 iii级时,应该保持在抗屈曲痉挛体位,降低手屈肌肌张力,诱发伸肌伸展。此时适当增加手指辅助控制弹簧的原长。对于手的屈肌起到轻缓而持续的牵伸作用可降低肌张力,抑制肌肉痉挛。
43.预防和矫正畸形:可以调节指间关节角度螺纹杆使手指达到一个合适的角度,以提供一个持续的矫形力从而预防和矫正手的畸形。根据不同时期的恢复情况,逐步调指间关节角度螺纹杆的长度调整不同时期对关节的作用力。
44.抗阻功能训练:通过更换不同弹性系数和不同原长的手指辅助控制弹簧,可产生对伸肌或屈肌阻力来起到抗阻肌群肌力训练的作用,可依照患者的恢复情况来逐步增加或减小弹性系数来满足患者恢复的不同阶段的需求。
45.限制活动范围:通过改变矫形器关节结构使其在特定角度发生机械干涉,把动态矫形器的活动范围限制在某一个范围内,如前臂部正中神经损伤修复术后早期调整腕关节结构增加机械干涉把腕关节的活动度限制在屈曲30
°‑
80
°
的范围内,不允许其屈腕角度小于30
°
和背伸。
46.手部不同区域可分别控制:本矫形器因具有高度模块化的特点,矫形器不同区域可执行不同功能。例如:可以在手指进行抗阻功能训练的同时固定腕关节在功能位或休息位。甚至与手指之间也可以独立执行不同的功能实现不同区域的分别控制。
47.上面所述的实施例仅仅是对本实用新型的优选实施方式进行描述,并非对本实用新型的构思和范围进行限定。在不脱离本实用新型设计构思的前提下,本领域普通人员对本实用新型的技术方案做出的各种变型和改进,均应落入到本实用新型的保护范围,本实用新型请求保护的技术内容,已经全部记载在权利要求书中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1