穿刺定位系统及其控制方法与流程
本发明涉及临床医疗,尤其涉及一种穿刺定位系统及其控制方法。
背景技术:
1、穿刺是将穿刺针刺入体腔抽取分泌物做化验,向体腔注入气体或造影剂做造影检查,或向体腔内注入药物的一种诊疗技术,目的是抽血化验,输血、输液及置入导管做血管造影脑或脊髓腔。穿刺用于诊断或治疗,例如有硬脑膜下腔穿刺、脑室穿刺、脑血管穿刺、腰椎穿刺、胸部体腔穿刺等。此外穿刺还可以用于通道的建立,便于后边手术器械的送入。
2、目前医生为患者做穿刺手术时,通常通过拍摄ct(computed tomography,电子计算机断层扫描)、mri(magnetic resonance imaging,磁共振成像)、超声、x射线等图像信息,由医生借助计算机辅助设置确定穿刺点和穿刺角度,然后制定相应手术方案,之后根据制定的方案进行穿刺。上述方式主要依赖术前制定的方案、医生的经验和观察到的情况手动进行手术,使得穿刺的精度受到多方面的因素影响,无法实现精准定位,且增加了操作者对影像的学习曲线,提升了手术的风险。
3、此外,一方面与超声引导相比,ct对软组织器官的分辨力有限,造成前列腺与周围组织的边界显示模糊,病灶不易在ct中显现,给精准的穿刺介入手术造成困难,另一方面mri对软组织分辨力度强,可用于病灶的识别和定位,超声可实时检测图像。因此,将超声和mri进行融合,有助于实现精准的穿刺介入手术。
技术实现思路
1、本发明的目的在于提供一种穿刺定位系统及其控制方法,通过所述规划模块和所述超声模块获取清楚准确的图像信息,并通过显示模块进行实时显示,通过所述工作站模块实现所述调整模块和所述执行模块的精确控制,提升操作的准确度。
2、为实现上述目的,本发明提供了一种穿刺定位系统,包括规划模块、超声模块、工作站模块、显示模块、调整模块和执行模块,所述规划模块与所述工作站模块电连接,所述规划模块用于获取对象的mri图像信息,并用于根据所述mri图像信息确定操作区域和非操作区域,所述规划模块根据所述操作区域、所述非操作区域和所述mri图像信息重建图像得到重建图像信息,所述规划模块将所述重建图像信息传输给所述工作站模块,所述超声模块与所述工作站模块电连接,所述超声模块用于获取所述对象的超声图像信息并传输给所述工作站模块,所述工作站模块与所述显示模块电连接,所述工作站模块接收所述重建图像信息和所述超声图像信息并建立操作路径,所述工作站模块将所述重建图像信息和所述超声图像信息传输给所述显示模块,所述显示模块接收所述重建图像信息和所述超声图像信息并显示,所述调整模块和所述执行模块均与所述工作站模块电连接,所述工作站模块用于控制所述控制模块和所述执行模块的启闭,所述执行模块设置于所述调整模块,所述调整模块用于调整所述执行模块的位置和角度,所述执行模块用于进行对应操作。
3、本发明的穿刺定位系统的有益效果在于:通过规划模块获取所述对象的mri图像信息,并根据所述mri图像信息确定所述对象的操作区域和非操作区域,之后将所述操作区域和所述非操作区域进行分割或者勾勒,并重建图像得到所述重建图像信息,使得所述操作区域和所述非操作区域显示的更加清楚,通过所述超声模块获取所述对象的超声图像信息,通过所述工作站模块根据所述超声图像信息和所述重建图像信息建立操作路径,并将所述超声图像信息和所述重建图像信息进行图像融合,然后传输至所述显示模块进行显示,之后通过所述工作站模块控制所述控制模块的启闭调整所述执行模块的位置和角度,最后进行对应操作。由此可见,本技术的穿刺定位系统通过mri图像确定操作区域和非操作区域,通过所述超声模块获取实时的超声图像,并通过所述显示模块对所述对象的所述重建图像信息和所述超声图像信息进行图像融合并实时显示,可以清楚准确的观察图像信息,准确的判断操作区域和非操作区域的位置,并通过所述工作站模块根据所述重建图像信息和所述超声图像信息建立所述操作路径,可以使得所述操作路径更加准确,之后通过所述工作站模块控制所述调整模块开启对所述执行模块的位置进行调整,使得调整的精度更高,最后通过所述工作站模块控制所述执行模块进行对应操作,能够精确控制所述执行模块的行进距离。
4、在一种可行的方案中,还包括定位模块,所述定位模块设置于所述执行模块,所述定位模块与所述工作站模块电连接,所述定位模块用于获取所述执行模块位置信息并传输至所述工作站模块。其有益效果在于:通过将所述定位模块设置于所述执行模块,获取所述执行模块的实时位置信息并将所述位置信息传输至所述工作站模块,便于知晓所述执行模块的空间位置,便于精确移动所述执行模块的位置,便于精确控制所述执行模块与所述对象的相对位置。
5、在一种可行的方案中,还包括融合模块和计算模块;所述融合模块分别与所述工作站模块、所述显示模块和所述计算模块电连接,所述融合模块获取所述执行模块位置信息和所述操作路径并融合成实时位置信息,所述融合模块将所述实时位置信息传输给所述计算模块和所述显示模块;所述计算模块与所述工作站模块电连接,所述计算模块接收所述实时位置信息,并根据所述实时位置信息计算所述执行模块位置信息和所述操作路径的差值信息并传输给所述工作站模块。其有益效果在于:通过所述融合模块将所述执行模块位置信息和所述操作路径整合成实时位置信息,通过所述计算模块计算所述执行模块位置信息和所述操作路径的差值信息并传输给所述工作站模块,便于所述工作站模块根据所述差值信息便于判定所述执行模块是否调整至所述操作路径所在位置,且便于在未调整到位时所述工作站模块根据所述差值信息继续控制所述调整模块调整所述执行模块的位置。
6、在一种可行的方案中,还包括移动模块和连接模块,所述工作站模块和所述显示模块设置于所述移动模块,所述移动模块用于调整位置,所述连接模块设置于所述移动模块,所述超声模块和所述调整模块设置于所述连接模块,所述连接模块用于调整所述超声模块和所述调整模块的位置。其有益效果在于:通过所述移动模块便于调整穿刺定位系统的位置,设置连接模块便于所述执行模块和所述超声模块的固定和空间位置调整。
7、在一种可行的方案中,所述移动模块设有中空内腔,所述中空内腔用于存储所述连接模块、所述超声模块、所述调整模块和所述执行模块。其有益效果在于:这样设置便于对所述执行模块、所述超声模块、所述调整模块和所述执行模块进行存储,一方面降低穿刺定位系统的占用空间,另一方面能够降低外界环境对上述模块的影响,减缓老化。
8、在一种可行的方案中,所述规划模块包括图像获取单元、分析单元、重建单元和输入输出单元,所述图像获取单元分别与所述分析单元和所述重建单元电连接,所述图像获取单元用于获取所述mri图像信息并传输给所述分析单元和所述重建单元,所述分析单元与所述重建单元电连接,所述分析单元接收所述mri图像信息并确定所述操作区域和所述非操作区域,所述分析单元将所述操作区域和所述非操作区域信息传输给所述重建单元,所述重建单元与所述输入输出单元电连接,所述重建单元接收所述mri图像信息、所述操作区域和所述非操作区域信息,并根据所述mri图像信息、所述操作区域和所述非操作区域信息重建图像得到所述重建图像信息并传输给所述输入输出单元,所述输入输出单元与所述工作站模块电连接,所述输入输出单元接收所述重建图像信息并传输给所述工作站模块。其有益效果在于:通过所述图像获取单元获取所述mri图像信息,通过所述分析单元确定所述操作区域和所述非操作区域,通过所述重建单元对所述mri图像、所述操作区域和所述非操作区域进行重建,对所述操作区域和所述非操作区域进行勾勒或者分割,使之显示更加清楚,通过所述输入输出单元将重建后的图像信息传输至所述工作站模块,同时也便于通过所述输入输出单元获取所述工作站模块的指令信息。
9、在一种可行的方案中,所述超声模块包括超声探头、转动机构、直线运动机构和超声鞘;所述超声探头设置于所述转动机构,所述转动机构用于带动所述超声探头转动,所述超声探头用于获取所述超声图像信息;所述超声鞘设置于所述超声探头一侧,所述转动机构设置于所述直线运动机构,所述直线运动机构用于带动所述超声探头往复运动;所述超声探头、所述转动机构和所述直线运动机构与所述工作站模块电连接,所述超声探头将所述超声图像信息传输给所述工作站模块,所述工作站模块分别控制所述超声探头、所述转动机构和所述直线运动机构的启闭。其有益效果在于:通过设置所述超声鞘降低所述超声鞘与所述对象之间摩擦,通过设置所述转动机构和所述直线运动机构使得所述超声探头能够获取不同方位或不同部位的图像信息。
10、在一种可行的方案中,所述调整模块包括第一移动机构、第二移动机构、第一固定夹、第二固定夹、第三移动机构和第一穿刺针架;所述第一移动机构设置于所述转动机构,所述第二移动机构设置于所述第一移动机构,且所述第一移动机构和所述第二移动机构呈一定角度设置,所述第一移动机构用于带动所述第二移动机构移动;所述第一固定夹和所述第三移动机构设置于所述第二移动机构,所述第二移动机构用于带动所述第一固定夹和所述第三移动机构运动;所述第二固定夹设置于所述第三移动机构,所述第三移动机构用于带动所述第二固定夹绕所述第一固定夹转动;所述第一穿刺针架设置于所述第一固定夹和所述第二固定夹,所述执行模块设置于所述第一穿刺针架或所述第三移动机构;所述第一移动机构、所述第二移动机构和所述第三移动机构均与所述工作站模块电连接,所述工作站模块分别控制所述第一移动机构、所述第二移动机构和所述第三移动机构的启闭。
11、其有益效果在于:通过设置所述超声模块对所述第一移动机构进行固定,通过所述转动机构能够调整所述第一穿刺针架所在的平面在空间内的朝向,通过所述第一移动机构和所述第二移动机构使得能够调整所述第一穿刺针架所在的平面在空间内的位置,通过所述第三移动机构带动所述第二固定夹上的所述第一穿刺针架绕所述第一固定夹转动,能够调整所述第一穿刺针架在所在平面内的朝向,叠加所述转动机构、所述第一移动机构、所述第二移动机构和所述第三移动机构的作用使得所述第一穿刺针架可以朝向空间内的任意一点,使得所述第一穿刺针架可以到达所需的路径位置。
12、在一种可行的方案中,所述调整模块包括平面移动机构、第一角度调节机构、第二角度调节机构和第二穿刺针架;所述第一角度调节机构设置于所述平面移动机构,所述第二角度调节机构设置于所述第一角度调节机构,且所述第一角度调节机构与所述第二角度调节机构呈一定角度设置,所述第二穿刺针架设置于所述第二角度调节机构,所述平面移动机构用于带动所述第一角度调节机构移动,所述第一角度调节机构用于带动所述第二角度调节机构转动,所述第二角度调节机构用于带动所述第二穿刺针架转动;所述平面移动机构、所述第一角度调节机构和所述第二角度调节机构分别与所述工作站模块电连接,所述工作站模块分别控制所述平面移动机构、所述第一角度调节机构和所述第二角度调节机构的启闭。
13、其有益效果在于:通过设置所述平面移动机构调整所述第一角度调节机构的位置,通过所述第一角度调节机构和所述第二角度调节机构的共同作用调整所述第二穿刺针架在空间内的朝向,叠加所述平面移动机构的作用使得所述第二穿刺针架可以朝向空间内的任一点。
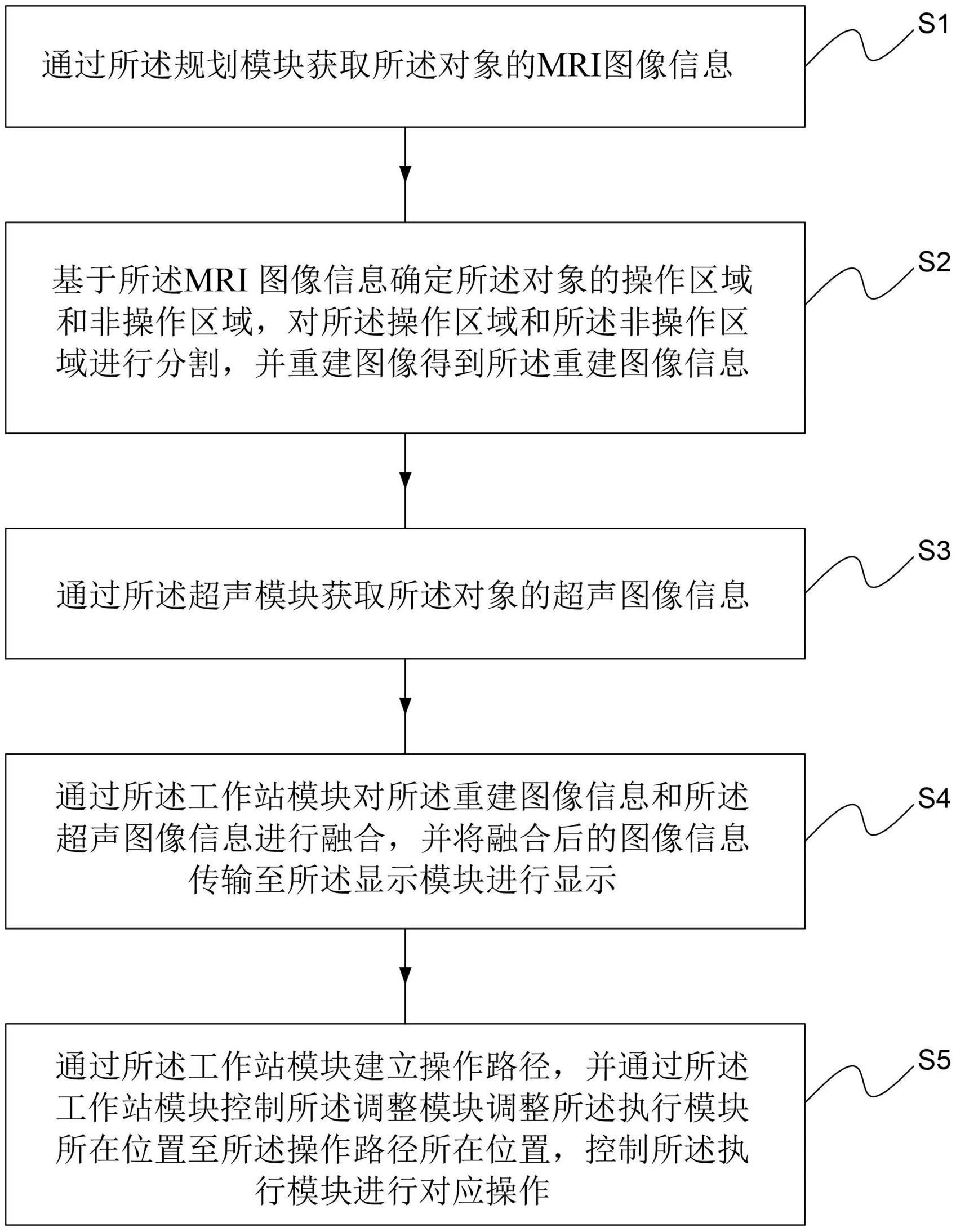
14、本发明还提供了一种穿刺定位系统的控制方法,包括以下步骤:s1:通过所述规划模块获取所述对象的mri图像信息,s2:基于所述mri图像信息确定所述对象的操作区域和非操作区域,对所述操作区域和所述非操作区域进行分割,并重建图像得到所述重建图像信息,s3:通过所述超声模块获取所述对象的超声图像信息,s4:通过所述工作站模块对所述重建图像信息和所述超声图像信息进行融合,并将融合后的图像信息传输至所述显示模块进行显示,s5:通过所述工作站模块建立操作路径,并通过所述工作站模块控制所述调整模块调整所述执行模块所在位置至所述操作路径所在位置,控制所述执行模块进行对应操作。
15、本发明的穿刺定位系统的控制方法的有益效果在于:通过所述规划模块获取所述对象的所述mri图像信息,并根据所述mri图像信息确定所述操作区域和所述非操作区域,并对所述操作区域和所述非操作区域进行分割,之后根据分割后的操作区域、非操作区域信息和所述mri图像信息重建图像,使得所述操作区域和所述非操作区域显示的更加清楚,同时通过所述超声模块获取所述对象的超声图像信息,再通过所述工作站模块对所述重建图像信息和所述超声图像信息进行融合,并通过所述显示模块进行实时显示,便于操作人员观察,之后通过所述工作站模块建立操作路径,并根据所述操作路径对所述执行模块的位置进行调整,调整到位后进行对应操作,能够使得调整的位置更加准确,提升操作的精确度。
16、在一种可行的方案中,所述步骤s5具体包括以下步骤:s51:通过所述工作站模块建立若干个所述操作路径,s52:通过所述工作站模块选定s51中的一个所述操作路径,s53:控制所述调整模块调整所述执行模块所在位置至选定的所述操作路径的所在位置,s54:通过所述执行模块进行对应操作,s55:重复执行步骤s52至s54直至完成所有操作。其有益效果在于:这样设置通过建立若干个所述操作路径,并通过选定多个不同的所述操作路径进行对应操作,可以通过不同角度获取操作区域的病理样本,可以得到更加准确的病理分析结果。
17、在一种可行的方案中,所述步骤s53具体包括以下步骤:s530:提供定位模块,所述定位模块设置于所述执行模块,所述定位模块实时获取所述执行模块的位置信息并传输至所述工作站模块和所述显示模块,s531:所述工作站模块根据实时的所述位置信息和选定的所述操作路径计算所述执行模块所需的调整信息和调整距离,并根据所述调整信息控制所述调整模块启动直至所述调整距离为零时控制所述调整模块关闭,所述显示模块接收所述位置信息并实时显示。其有益效果在于:通过所述定位模块获取所述执行模块的位置信息,并通过所述工作站模块计算所述执行模块所需的调整信息和调整距离,这样能够精确控制所述调整模块的启闭、精确调整所述执行模块的位置。
18、在一种可行的方案中,所述步骤s54具体包括以下步骤:s540:所述执行模块包括执行单元和驱动单元,所述执行单元设置于所述驱动单元的活动端,所述执行单元用于进行对应操作,所述驱动单元用于驱动所述执行单元移动,所述工作站模块用于控制所述驱动单元启闭,s541:所述工作站模块控制所述驱动单元开启,s542:所述定位模块获取所述执行单元的初始位置信息,所述工作站模块根据所述初始位置信息和所述操作区域计算所述执行单元所需行进的深度信息,s543:通过所述定位模块获取所述执行单元实时的行进距离信息,直至所述行进距离信息与所述深度信息相等时,控制所述驱动单元关闭,s544:通过所述执行单元进行对应操作,s545:所述工作站模块控制所述驱动单元带动所述执行单元退出。其有益效果在于:通过所述定位模块获取所述执行单元实时的行进距离信息,并根据所述工作站模块计算的所述行进深度信息,对所述驱动单元进行精确的启闭控制,保证所述执行单元运动至操作区域,获取所需的病理样本。
19、在一种可行的方案中,所述步骤s3具体包括以下步骤:s31:开启所述超声模块,s32:将所述超声模块移动至所述对象的待操作区域,s33:自动化运行所述超声模块获取所述超声图像信息。其有益效果在于:这样设置通过手动移动将所述超声模块移动至待检测区域,并通过自动控制控制所述超声模块旋转或前后移动获取超声图像,使用方式简单,便于节省操作人员的精力。
20、在一种可行的方案中,所述步骤s3和所述步骤s4之间还包括步骤:所述超声模块根据所述步骤s3获取的超声图像信息对非操作区域进行分割和重建。其有益效果在于:这样设置能够在临床进行操作时再次确定所述非操作区域的位置,避免对所述非操作区域造成损伤。
- 还没有人留言评论。精彩留言会获得点赞!