固定用于致动医疗设备的远端头部的线缆的引导护套的方法与流程
1.本发明涉及一般意义上能够进入身体内部(例如腔或通道)的医疗设备的技术领域,更具体地说,本发明涉及导管型医疗设备,优选涉及内窥镜型医疗设备。
2.本发明的目的为可重复使用的或一次性的内窥镜找到了特别有利的应用。
3.更具体地,本发明涉及弯曲结构(bending structure)的致动线缆的引导护套的固定,允许定位此类导管或内窥镜型的医疗设备的远端头部,该远端头部适用于确保多种功能,诸如可视化、流体供应、流体抽吸、器械供应、样品收集或手术操作的执行。
4.根据本发明的导管型或内窥镜型医疗设备发现了特别有利的应用,用于进入人体的中空器官、腔或天然或者人造管道的内表面,以便执行用于治疗、手术或诊断目的的各种操作。
5.根据本发明的导管型或内窥镜型医疗设备用于诊断、治疗或手术目的,以检查可通过自然或人造路径进入的人体所有内部部位。例如,根据本发明的导管型或内窥镜型医疗设备可用于如下领域:泌尿道、胃肠道、呼吸系统、心血管系统、气管、窦腔、女性生殖系统、腹腔或通过自然或人造路径探索的人体任何其他部位。
背景技术:
6.一般来说,如专利申请wo 2014/106510所述,医用内窥镜包括控制手柄,插入管固定于该控制手柄。该管包括配备有光学可视化系统的远端头部,光学可视化系统用于照明和检查人体的器官、腔或管道。在该远端头部的上游,插入管包括弯曲结构或由铰接椎体形成的偏转部分,其能够使用安装在插入管内的一个或多个致动线缆来定向远端头部。每个致动线缆包括远端部和近端部,所述远端部固定至远端头部,控制机构作用在所述近端部上,所述控制机构装备手柄,以确保线缆的滑动,从而确保该偏转部分的折叠,以定向所述远端头部。
7.传统上,每个致动线缆安装在固定至控制手柄的引导护套内,以便使用控制机构,相对于引导护套施加在线缆的近端部上的移动可被传输到致动线缆的远端部,从而引起远端头部的相应移动。如专利申请wo 2016/188537中所述,引导护套固定至控制手柄。这种解决方案在实践中并不令人满意,因为似乎很难自动执行此类固定操作,以在整个制成过程中获得恒定的固定质量。此外,这种类型的固定不能完全保证耐老化,例如在储存和运输过程中。其他解决方案包括如专利文件ep 1 737 335所述将线缆在插入于滑块的螺母中保持到位,或使用专利us 6 673 012中所述的滑轮。
8.专利文件ep 3 066 995中还描述了使用触发器来致动内窥镜的远端部分。
技术实现要素:
9.因此,本发明旨在通过提出一种新技术来克服现有技术的缺点,该技术用于将线缆的引导护套固定至控制手柄,所述线缆用于致动导管型或内窥镜型医疗设备的远端头部,这种新技术确保了整个产品的长期且恒定的固定质量,同时具有较低的实施成本。
10.为了实现这样的目标,用于固定用于致动医疗器械远端头部的线缆的引导护套的方法包括以下步骤:
[0011]-提供用于医疗器械的控制手柄的壳体,具有由热塑性材料制成的至少一个柱(column),用于固定致动线缆的支撑护套,所述致动线缆能相对于支撑护套平移;
[0012]-从柱的末端部分布置沟槽,所述沟槽径向延伸以允许致动线缆的支撑护套的插入;
[0013]-将致动线缆的支撑护套定位在沟槽内,而自由端从柱伸出;
[0014]-至少加热固定柱的自由端,并向柱施加压力,以确保通过焊接将支撑护套附接至控制手柄的壳体。
[0015]
有利的是,对柱施加压力以使材料移动,直到获得与支撑护套接触的珠边(bead,凸圆)。因此,支撑护套与壳体的附接更好。
[0016]
优选地,对柱施加压力,直到获得至少部分地封闭所述沟槽的珠边。
[0017]
有利的是,控制手柄的壳体和柱由热塑性材料制成。
[0018]
根据示例性实施例,沟槽从柱的末端部分布置,具有供支撑护套插入沟槽中的抵靠底部,沟槽的深度使得柱的自由端延伸到支撑护套之外。
[0019]
沟槽布置为具有一深度,该深度等于包含在支撑护套直径的1.5到5倍之间的数值。
[0020]
根据有利的变型实施例,超声波焊接确保将支撑护套附接至控制手柄的壳体。
[0021]
根据本发明的方法实现了热和压力铆接,以确保支撑护套到控制手柄的壳体的附接。
[0022]
本发明的另一个目的是提供一种用于导管型或内窥镜型医疗设备的控制手柄的壳体,该壳体设有由热塑性材料制成的至少一个柱,并具有径向穿通的沟槽,致动线缆的支撑护套安装在所述沟槽中,所述致动线缆能相对于所述壳体平移移动,柱具有由热塑性材料制成的珠边形状的变形自由端,并与支撑护套配合以将支撑护套连接到壳体。
[0023]
有利的是,柱和壳体由热塑性材料制成。
[0024]
以下参考附图给出的描述产生了各种其他特征,所述附图通过非限制性示例示出了本发明目的的实施例。
附图说明
[0025]
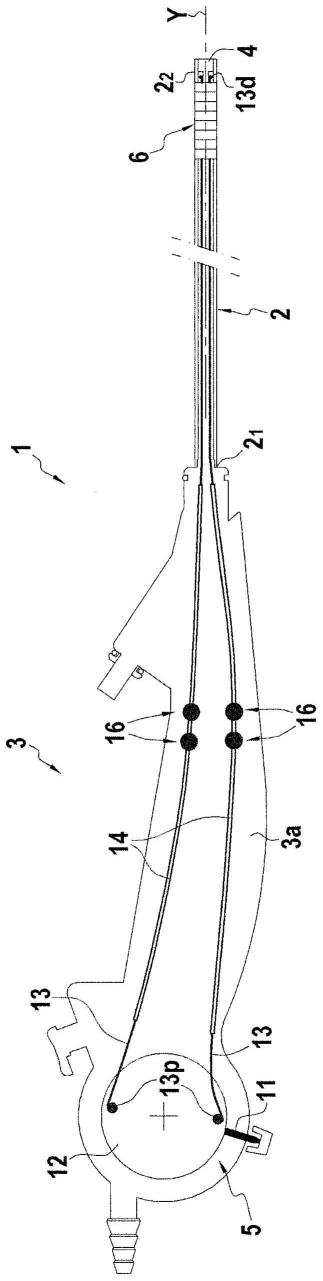
[图1]图1是一般意义上的导管型或内窥镜型医疗设备的示意图,包括配有固定柱的控制手柄,所述固定柱用于线缆的引导护套,所述线缆用于致动医疗设备的远端头部。
[0026]
[图2]图2是一个立体图,示出了致动线缆的引导护套在固定至控制手柄之前的定位。
[0027]
[图2a]图2a是沿图2的线a-a截取的横截面图。
[0028]
[图3]图3是一个立体图,示出了致动线缆已固定至控制手柄之后的引导护套。
[0029]
[图3a]图3a是沿图3的线a-a截取的横截面图,示出了固定至控制手柄的致动线缆的引导护套。
具体实施方式
[0030]
图1通过示例示出了一般意义上的内窥镜型或导管型的医疗设备1,其被设计为用于进入身体内部(例如腔或通道)。传统上,内窥镜型或导管型医疗设备1包括插入管2,插入管的一侧具有连接到控制手柄3的壳体3a的近端部分21,相对侧具有配备有远端头部4的远端部分22。插入管2以临时或永久的方式固定在控制手柄3的壳体上。该插入管2具有较大或较小的长度和柔性,旨在被引入自然或人造路径中,以执行各种操作或功能,用于治疗、手术或诊断目的。插入管2由半刚性材料制成,其长度与待检查的管道的长度相适应并且可以在5cm到2m之间。插入管2具有各种横截面形状,诸如方形、椭圆形或圆形。该插入管2与组织、人体器官或医用设备(套管针或探针)接触,基本上可供一患者单次或多次使用,或者甚至在去污、消毒或灭菌后可重复使用。
[0031]
根据优选实施例,根据本发明的医疗设备1是一种内窥镜,包括视觉系统,所述视觉系统能够照明和带回(return)插入管2的远端部分的图像。因此,内窥镜1包括安装在控制手柄3内且穿过插入管2直至远端头部4的视觉系统。
[0032]
传统上,医疗设备1还包括控制机构5,允许相对于插入管2的纵向轴线y定位远端头部4。为此,插入管2在远端头部4的上游包括弯曲、折叠或偏转部分6,允许相对于插入管2的纵向轴线y定向远端头部4。该弯曲、折叠或偏转部分6可以以任何适当的方式制造,以确保远端头部4相对于插入管2的纵向轴线y的弯曲。例如,该弯曲、折叠或偏转部分6可以由铰接在一起的管状椎体或由弹簧制成。
[0033]
控制机构5可以以任何合适的方式制造,使得远端头部4可以在插入管2为笔直的静止位置与偏转部分6为弯曲的弯曲位置之间移动。作为非限制性示例,控制机构5可对应于专利fr 3 047 887中描述的控制机构。为此,控制机构5包括手动控制杆11,可从控制手柄的壳体3a的外部访问。该控制杆11使安装在壳体3a内的至少一个枢转部件(例如滑轮12)旋转,并且安装在插入管2内的至少一个(在所示示例中为两个)致动线缆13固定在所述滑轮上以固定到远端头部4。致动线缆13的近端部13p相对于径向平面对称地相对固定在滑轮12上,而致动线缆13的远端部13d固定至远端头部4。
[0034]
该控制机构5适于确保例如远端头部4的左右或上下移动。在所示的示例中,控制杆11具有旋转冲程,但控制杆11可能具有平移移动,从而通过移动变换系统引起枢转部件12的旋转。类似地,控制机构5可适于使用三个或四个致动线缆13确保远端头部4的左右和上下移动。
[0035]
当然,致动线缆13以任何合适的方式制造,以确保导致远端头部4弯曲的移动传输功能。因此,这些致动线缆13可以例如由如金属或聚合物材料制成的杆、线、丝、股或链制成。通常,致动线缆13由直径在例如0.1mm和2mm之间的不锈钢制成。
[0036]
每个致动线缆13安装在支撑护套14内,所述支撑护套旨在固定至控制手柄3的壳体3a。因此,支撑护套14确保在远端头部4的偏转操作期间滑动引导致动线缆13。因此,致动线缆13相对于支撑护套14平移,支撑护套14与控制手柄3固定安装。例如,支撑护套14由不锈钢制成。通常,支撑护套14是通过沿致动线缆13缠绕一个或多个金属线形成的。
[0037]
根据本发明的一个特征,控制手柄3的壳体3a内部设有至少一个突起或突出部16,从控制手柄3的壳体3a的内表面3i突出(图2、2a)。该突起或突出部16在以下描述中被指定为柱16,因此对应于烟囱状件(chimney)、螺柱或衬垫,该烟囱状件、螺柱或衬垫沿着优选基
本垂直于壳体3a的内表面3i的延伸方向x从壳体3a的内表面3i突起。如下文更详细地描述的,每个柱16确保支撑护套14附接到控制手柄3的壳体3a,同时允许致动线缆13相对于支撑护套14滑动。因此,每个柱提供支撑护套14与壳体3a的坚固且永久的固定。
[0038]
在图1所示的示例中,控制机构5包括两个致动线缆13,每个致动线缆安装在支撑护套14内,支撑护套14使用根据本发明的两个固定柱16固定至壳体3a。当然,每个支撑护套14可以使用不同数量的固定柱16锚固到壳体3a。
[0039]
每个柱16由径向沟槽17左右交叉,在支撑护套14固定到柱之前,沟槽在柱16的末端部分打开,以允许从柱16的末端部分接合致动线缆13的支撑护套14。沟槽17布置成从柱16的末端部分沿延伸方向x的正割(secant)方向(例如基本垂直于延伸方向x)延伸,通向柱16的两个相对侧。如图3a更具体示出,沟槽17包括底部17a,支撑护套14位于该底部上。在附图所示的示例中,每个柱16均为与沟槽17径向交叉的管的形状。很明显,柱16可以由实心圆柱体制成,沟槽17与该圆柱体径向交叉。
[0040]
支撑护套14固定到柱上后,每个柱16具有两个分支16a,分别从沟槽17的任一侧突起,以与壳体3a相对,由与柱16材料相同的珠边18连接。该材料的珠边18至少部分地填充沟槽17以与支撑护套14配合,从而将支撑护套14连接到壳体3a。换句话说,该珠边18与支撑护套14接触,同时从其外表面装配到支撑护套14的厚度中。因此,珠边18从表面地穿透支撑护套14的厚度。在支撑护套14由一个或多个金属线缠绕而形成的情况下,珠边18插入支撑护套14的金属线的绕组(windings)之间。因此,支撑护套14牢固地锚固至壳体3a。
[0041]
根据本发明的一个特征,支撑护套14通过焊接而附接至柱16。根据本发明的一个特征,柱16由热塑性材料(即,能够通过加热到一定温度以上而软化并通过冷却而硬化的材料)制成。例如,制造柱16的材料落在半晶态或非晶态热塑性聚合物的分类下。通常,柱16例如由abs(丙烯腈-丁二烯-苯乙烯)、pp(聚丙烯)、pom(聚甲醛)、聚酰胺、聚氨酯、pe(聚乙烯)、ps(聚苯乙烯)或pvc(聚氯乙烯)或这些聚合物的任何混合物制成。
[0042]
根据有利实施例,壳体3a由热塑性材料制成。根据优选变型实施例,壳体3a和柱16由相同的热塑性材料制成。通常,使用成型技术制造壳体3a,在此期间同时形成柱16和壳体3a。当然,可以考虑将柱16添加到壳体3a的内表面3i上。
[0043]
使用固定柱16将引导护套14固定至壳体3a由如下所述的方法执行。
[0044]
固定方法的第一步包括:提供用于内窥镜型或导管型的医疗设备1的控制手柄的壳体3a,具有至少一个热塑性材料的柱16,适于允许固定致动线缆13的支撑护套14,所述致动线缆能相对于支撑护套平移。在所示的示例中,对于两个支撑护套14中的每一个,壳体3a包括从壳体3a的内表面3i彼此靠近突起的两个柱16,并且每个柱都制成轴或管状烟囱的形状。当然,每个支撑护套14的固定柱16的数量可以不同于两个,并且配备这种控制手柄的支撑护套14的数量可以不同于两个。
[0045]
有利的是,壳体3a和柱16在相同的制造步骤中制造。因此,壳体3a和柱16由热塑性材料制成,并且优选由相同的热塑性材料制成。然而,不能排除通过任何适当方式将柱16固定到壳体3a来将柱16添加到壳体3a上的步骤。
[0046]
从柱16的末端部分,布置有径向横穿的沟槽17,以允许插入致动线缆13的支撑护套14。该沟槽17在与壳体3a的内表面3i相反的方向上敞开,以允许从柱16的末端部分接合支撑护套4。该沟槽17优选在柱16的制造步骤期间制造。有利的是,壳体3a和具有沟槽17的
柱16在相同的制造步骤中制造。通常,壳体3a和具有沟槽17的柱16通过注射成型制成。当然,可以在柱16的实际制造步骤之后的步骤中制造该沟槽17。
[0047]
根据附图中所示的实施例,沟槽17具有底部17a,该底部在壳体3a的内表面3i上方突起。当然,沟槽17的底部17a可以对应于壳体3a的内表面3i。沟槽17的底部17a能够形成用于支撑护套14的抵靠或支承表面。
[0048]
根据一个实施例特征,沟槽17制造成具有确定的深度,以便一旦支撑护套14被插入沟槽中,柱16的自由端16l延伸到支撑护套14之外或上方。该自由端16l对应于分支16a的延伸到支撑护套14之外或上方的部分。换句话说,沟槽17的深度严格大于支撑护套14的直径。例如,沟槽17被布置成其深度等于包含在支撑护套14的直径的1.5到5倍之间的数值。因此,每个柱16包括两个分支16a,分别从沟槽17的任一侧突起,每个分支16a具有从支撑护套14伸出的自由端16l。
[0049]
因此,固定方法包括将支撑护套14定位在从柱16的末端部分向后缩进的沟槽17内,也就是说,同时柱的自由端16l从支撑护套14伸出。将支撑护套14插入沟槽17内的步骤可以手动或使用机械臂自动执行。根据有利特征,执行将支撑护套14插入沟槽17内,直到支撑护套抵靠沟槽17的底部17a。
[0050]
固定方法包括至少加热固定柱16的自由端,并在柱16上施加压力,以确保通过焊接将支撑护套14固定至控制手柄3的壳体3a。如图2a所示,至少使用适合所实施的焊接方法的焊接头20施加压力。实际上,可以由焊接头20和/或独立于焊接头20的装置提供热量。同样,可以在施加压力之前或在施加压力的同时提供热量。可以手动或使用机械臂自动执行将支撑护套14焊接到沟槽17内的步骤。例如,可以为壳体3a的所有柱16复制可被定义为获得有效焊接的温度参数以及焊接头20的位移参数。
[0051]
在柱16的自由端16l处供热导致其软化,从而在施加压力的作用下,材料根据靠近焊接头20的方向沿着支撑护套14的方向移动,如图2a中的箭头f1所示。焊接头20的移动方向有利地建立成平行于柱16的延伸方向x。在所示示例中,焊头20承载在柱16的自由端16l的末端部分上。有利的是,焊接头20相对于柱16移动。当然,可以考虑相对于焊接头20移动柱16,即壳体3a。
[0052]
移位的热塑性材料与支撑护套14接触或配合,从而支撑护套与柱16固定。因此,至少一部分移位的热塑性材料穿透沟槽17内部(图3a)。根据固定方法的有利变形,对固定柱16施加压力以使软化的材料移动,直到获得与支撑护套14接触或在表面上穿透支撑护套14的突起、珠边或螺柱18。在支撑护套14由一个或多个金属线缠绕而形成的情况下,该突起的软化材料插入支撑护套14的金属线的绕组之间。
[0053]
该珠边18来自热塑性材料,由柱16的至少自由端16l的变形产生。当然,该珠边18保持附接至柱16,形成一个整体。与变形前的状态相比,柱16根据其自由端16l的较大或较小高度变形。
[0054]
根据固定方法的有利变形,在柱16上施加压力,直到获得至少局部地封闭沟槽17的珠边18。在附图中,移位的热塑性材料因此在支撑护套14上方形成实心圆盘,完全封闭沟槽17。当然,珠边18可以采取不同的形状,例如与柱16的管状形状相对应的环形形状。
[0055]
通过实施热铆接方法,即(例如激光、电磁感应、热空气、红外线)或(轨道、纵向或轴向)摩擦振动焊接方法,执行将支撑护套14固定至壳体3a。
[0056]
根据示例性实施方案,通过实施超声波焊接方法将支撑护套14附接至壳体3a。根据本实施例,壳体3a例如位于砧座和焊接头20上,从而使振动超声波发生器(vibrating sonotrode)通过移动数毫米施加到柱16的末端部分以移动材料。
[0057]
根据本发明的方法允许获得用于内窥镜型或导管型医疗设备1的控制手柄的壳体3a,包括至少一个柱16,确保用于线缆的支撑护套14的固定,所述线缆用于致动该医疗设备1的远端头部4。这种固定牢固且永久。
[0058]
本发明不限于所描述和表示的示例,因为可以在不脱离其范围的情况下对其进行各种修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1