连续除污装置的制作方法
1.本发明涉及对物品的外表面利用除污剂雾进行连续除污且将该除污后的物品向无菌环境的作业室运送的连续除污装置。
背景技术:
2.出于医疗现场的便利性,正在制造预先填充有医药品的预灌封注射器和预灌封药瓶等。向这些注射器或药瓶等填充医药品的作业在无菌环境下的填充作业室(以下称作“无菌作业室”)中进行。在该作业中使用的注射器和药瓶等是一个个较小的部件,另外,也需要较多处理的数量。于是,这些注射器或药瓶等在各自的制造阶段中通过γ射线照射、电子束照射、eog(环氧乙烷气体)等而被杀菌,以将预定个数集中收纳于封装体的状态被向无菌作业室搬入。
3.该封装体例如存在在下述专利文献1中提出或作为以往技术而记载的医疗用器具封装体等(图1中的p)。这些封装体一般被称作剥开封装体(peel-open package),具备配合收纳在内部的注射器或药瓶等医疗器具的形状而成形的塑料制桶体(图1中的p1)和气体能够透过的上表面密封件(图1中的p2)。对于该上表面密封件,一般使用由高密度聚乙烯极细纤维构成的无纺布、特卫强(商标),气体能够通过该特卫强(商标)所具有的微细孔而向塑料制桶体内部透过,但可阻止微生物的侵入。
4.这样构成的封装体进一步用包装袋包裹其外部而流通、搬运。但是,在流通或搬运时,或者,在为了向无菌作业室搬入而从该包装袋取出时,塑料制桶体及上表面密封件的外表面会被污染。因此,若不对该污染的外表面进行除污,则无法向无菌作业室搬入。于是,利用与无菌作业室连接设置的除污装置对塑料制桶体及上表面密封件的外表面进行除污后向无菌作业室运送,在无菌作业室内从塑料制桶体剥开上表面密封件,对内部的杀菌后的注射器或药瓶进行填充作业。
5.一般来说,用于对向无菌作业室搬入的收纳体进行除污的除污装置对应于目的而采用eog(环氧乙烷气体)、过氧化氢(气体或雾)、臭氧气体、等离子体、γ射线照射、紫外线照射或电子束照射等各种方法。在它们之中,作为最一般的方法之一,存在利用过氧化氢(气体或雾)的方法。该过氧化氢具有强力的除污效果,廉价且容易入手,并且作为最终分解成氧和水的对环境友好的除污剂是有效的。但是,在利用过氧化氢的方法中,存在为了得到要求的水平的除污效果而需要很多时间这一问题。另外,存在在除污后去除冷凝于收纳体的表面的过氧化氢水膜的通风需要更多的时间这一问题。
6.另一方面,在如预灌封注射器的制造那样需要每单位时间处理大量收纳体的除污装置中,期望时间处理较短且除污效果较高的方法。于是,在下述非专利文献1中,作为与使用一般的过氧化氢等除污剂的装置相比可得到较高的除污效果而且生产性高且没有残留物质的安全的装置,介绍了并入有低能量电子加速器的除污装置。
7.该除污装置在收纳有预灌封注射器的封装体的处理中实际运转,装有预先被除污处理了的注射器的封装体在其外表面由电子束除污后由输送机向无菌作业室运送。该装置
利用分别以120度的角度配置的三台低能量电子加速器(图2中的56、57、58)从三个方向的各照射窗(56a、57a、58a)向封装体的所有表面照射电子束。
8.需要说明的是,在该装置中,通过控制照射的电子束的束量,能够对塑料制桶体和上表面密封件高效地进行除污。根据下述非专利文献1,通过该装置,每一小时能够处理3600个注射器,实现了较高的生产性。
9.现有技术文献
10.专利文献1:日本专利第4237489号
11.非专利文献1:财团法人放射线利用振兴协会,放射线利用技术数据库,数据编号:010306(制作:2007/10/03,关口正之)
技术实现要素:
12.发明所要解决的课题
13.在上述非专利文献1的除污装置中,为了对医疗用器具封装体的外表面整体进行除污,从在朝向运送方向运送的医疗用器具封装体的外周部侧分别以120度的角度配置的三台低能量电子加速器同时照射电子束(参照图2)。
14.在该方法中,对于对医疗用器具封装体的外表面(上表面部、底面部及左右侧面部)照射电子束是充分的。但是,朝向医疗用器具封装体的运送方向而在前后侧面部存在距离,对于照射电子束是不充分的。因此,难以将除污效果的可靠性和安全性维持得较高。于是,在从外周部向医疗用器具封装体的前后侧面部照射电子束的情况下,距各电子加速器的照射窗的距离变远,因此需要增大各电子加速器的照射窗并调整照射角度并且提高各电子加速器的加速电压而增强照射强度。
15.一般来说,能够增大照射面积、提高加速电压的低能量电子加速器的每一台的价格昂贵。另外,在提高了加速电压的情况下,基于电子加速器的使用累计时间的使用界限(寿命)变短,由更换引起的维护费用也比较贵。因此,存在因同时使三台昂贵的装置运转而装置的初始费用和维护费用都变高这一问题。
16.另一方面,在增强各电子加速器的照射强度而对医疗用器具封装体的前后侧面部充分地进行除污的情况下,因医疗用器具封装体的部位而在照射强度上产生强弱,在距电子加速器的照射窗的距离较近的部位处,进行基于过剩的电子束的照射,会对医疗用器具封装体产生损害。另外,存在因医疗用器具封装体的各部位与各电子加速器的照射窗的距离不同而各部位的除污水平不同这一问题。
17.这样,关于近年来广泛使用的利用过氧化氢等除污剂的方法,被认可有强力的除污效果、廉价、对环境友好等效果,另一方面,处理需要较长时间,且在需要大量处理的医疗用器具封装体的除污中存在问题。另一方面,关于利用电子加速器的方法,在需要大量处理的医疗用器具封装体的除污中被认可有效果,另一方面,存在装置价格和维护费用昂贵且各部位的除污水平不同这一问题。
18.于是,本发明的目的在于,应对上述的诸问题,提供一种连续除污装置,不使用昂贵的电子加速器而采用近年来广泛使用的过氧化氢等除污剂,能够实现短时间处理、各部位的除污水平均等且能够实现除污对象物品的大量处理。
19.用于解决课题的手段
20.在上述课题的解决时,本发明人锐意研究的结果,通过利用超声波雾化装置将过氧化氢水等除污剂变换为微细的除污剂雾且使该除污剂雾集中于除污装置内的除污对象物品的表面而完成了本发明。
21.即,本发明的连续除污装置根据第一技术方案的记载,
22.在与无菌作业室(20、120)连接设置,通过除污剂雾(41、141)对物品(p)的外表面进行除污,并将该物品向上述无菌作业室的内部运送的连续除污装置(10、110)中,其特征在于,
23.连续除污装置(10、110)具备:由除污区域(11、111)和通风区域(12、112)构成的装置主体(10a、110a)、运送物品的运送单元(30、130)、雾供给单元(雾放出装置)及通风单元(50、150),
24.上述装置主体具备:将除污前的物品向上述除污区域搬入的搬入口(13、113)和将已除污的物品从上述通风区域搬出的搬出口(14、114),
25.上述运送单元在支撑从上述搬入口搬入的物品且经由上述除污区域及上述通风区域的内部而运送至上述搬出口时,通过在上述除污区域的内部变更支撑该物品的部位,能够对该物品的全部的外表面进行除污,
26.上述雾供给单元具备将除污剂变换为上述除污剂雾并向上述除污区域的内部供给的超声波雾化装置,使上述除污剂雾集中地作用于由上述运送单元在上述除污区域的内部运送的物品的外表面,
27.上述通风单元通过清洁气体去除残留于从上述除污区域由上述运送单元运送来的物品的外表面的上述除污剂雾。
28.另外,本发明根据第二技术方案的记载,在第一技术方案所述的连续除污装置(10)的基础上,其特征在于,
29.所述运送单元(30)由在除污区域(11)及通风区域(12)的内部运送物品的物品运送装置(31a、31b、31c、31d)和变更支撑物品的部位的支撑改换装置(32)构成,
30.所述物品运送装置将从所述搬入口搬入的多个物品在所述除污区域及所述通风区域的内部向升降中的任一方向连续地运送并从所述搬出口搬出,
31.所述支撑改换装置在所述除污区域的内部从所述物品运送装置拆下物品且将该物品再次支撑于所述物品运送装置。
32.另外,本发明根据第三技术方案的记载,在第一技术方案所述的连续除污装置(110)的基础上,其特征在于,
33.上述运送单元(130)由在除污区域(111)及通风区域(112)的内部运送物品的物品运送装置(131a、131b、131c)和变更支撑物品的部位的支撑改换装置(132)构成,
34.上述物品运送装置将从上述搬入口搬入的多个物品在上述除污区域及上述通风区域的内部在水平方向上连续地运送并从上述搬出口搬出,
35.上述支撑改换装置在上述除污区域的内部从上述物品运送装置拆下物品且将该物品再次支撑于上述物品运送装置。
36.另外,本发明根据第四技术方案的记载,在第一技术方案~第三技术方案中任一项所述的连续除污装置的基础上,其特征在于,
37.作为除污对象的上述物品是收纳已杀菌的注射器或药瓶等医疗器具等而成的收
纳体。
38.发明效果
39.根据上述结构,本发明的连续除污装置具备:由除污区域和通风区域构成的装置主体、运送物品的运送单元、雾供给单元及通风单元。装置主体具备:将除污前的物品向除污区域搬入的搬入口和将已除污的物品从通风区域搬出的搬出口。运送单元在支撑从搬入口搬入的物品并经由除污区域及通风区域的内部而运送至搬出口时,在除污区域的内部变更支撑该物品的部位。由此,能够对该物品的全部的外表面进行除污。
40.雾供给单元具备将除污剂变换为除污剂雾并向除污区域的内部供给的超声波雾化装置。该雾供给单元使除污剂雾集中地作用于由运送单元在除污区域的内部运送的物品的外表面。通风单元通过清洁气体去除残留于从除污区域由运送单元运送来的物品的外表面的除污剂雾。
41.这样,根据上述结构,能够提供一种连续除污装置,不使用昂贵的电子加速器而采用近年来广泛使用的过氧化氢等除污剂,能够实现短时间处理、各部位的除污水平均等,能够实现除污对象物品的大量处理。
42.另外,根据上述结构,运送单元由在除污区域及通风区域的内部运送物品的物品运送装置和变更支撑物品的部位的支撑改换装置构成。物品运送装置将从搬入口搬入的多个物品在除污区域及通风区域的内部向升降中任一方向连续地运送并从搬出口搬出。支撑改换装置在除污区域的内部从物品运送装置拆下物品且将该物品再次支撑于物品运送装置。由此,能够更具体地发挥上述作用效果。
43.另外,根据上述结构,运送单元由在除污区域及通风区域的内部运送物品的物品运送装置和变更支撑物品的部位的支撑改换装置构成。物品运送装置将从搬入口搬入的多个物品在除污区域及通风区域的内部在水平方向上连续地运送并从所述搬出口搬出。支撑改换装置在除污区域的内部从物品运送装置拆下物品且将该物品再次支撑于物品运送装置。由此,能够更具体地发挥上述作用效果。
44.另外,根据上述结构,作为除污对象的物品可以是收纳已杀菌的注射器或药瓶等医疗器具等而成的收纳体。由此,能够更具体地发挥上述作用效果。
附图说明
45.图1是示出在第一及第二实施方式的连续除污装置中作为除污对象的收纳体(封装体)的立体图。
46.图2是示出非专利文献1的连续除污装置的电子加速器的配置的概要图。
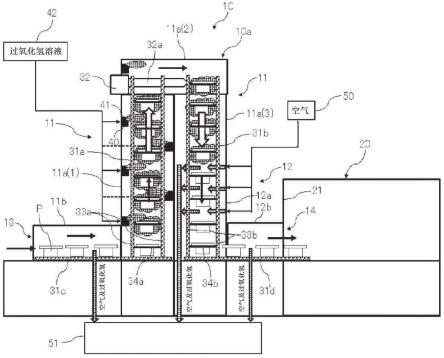
47.图3是在第一实施方式的竖型连续除污装置的主视图中示出内部的状态的概略剖视图。
48.图4是示出第一实施方式的滚动输送机担载封装体p的状态的(a)主视图、(b)侧视图。
49.图5是示出从图4的滚动输送机利用支撑改换装置换载了封装体p的状态的(c)主视图、(d)侧视图。
50.图6是在第二实施方式的横型连续除污装置的主视图中示出内部的状态的概略剖视图。
51.图7是示出第二实施方式的悬挂输送机担载封装体p的状态的(a)主视图、(b)侧视图。
52.图8是从图4的悬挂输送机利用支撑改换装置换载了封装体p的状态的(c)主视图、(d)侧视图。
53.图9是作为各实施方式的变形例而示出取代支撑杆而利用支撑爪来担载封装体p的状态的(a)主视图、(b)侧视图。
具体实施方式
54.在本发明中,“雾”广义地解释,包括微细化而浮游于空气中的除污剂的液滴的状态、除污剂的气体和液滴混合存在的状态、除污剂在气体与液滴之间反复进行冷凝和蒸发的相变化的状态等。另外,关于粒径,也包括根据情况而细微地划分的雾(也存在被定义为10μm以下的情况)、浓雾(也存在被定义为5μm以下的情况)、液滴(微细的状态)等地广义地解释。需要说明的是,在本发明中认为:通过超声波雾化装置的作用而被均匀化为超微细粒子,在短时间内也发挥高度的除污效果。
55.以下,对本发明的连续除污装置利用各实施方式来详细地进行说明。需要说明的是,本发明并非仅限定于下述的各实施方式。在以下所示的各实施方式的连续除污装置中,作为除污剂而使用过氧化氢。首先,说明利用过氧化氢来进行除污的物品。在各实施方式中,将收纳有注射器或药瓶等医疗器具的收纳体(封装体)设为除污对象物品。需要说明的是,在本发明中,不将除污对象物品限定于这些收纳体(封装体),只要是连续除污并向无菌作业室运送的物体,就设为对象。
56.《第一实施方式》
57.图1是示出在本第一实施方式的连续除污装置中设为除污对象的收纳体(封装体)的立体图。不过,在本发明中,收纳体的形状并非仅限定于图1的形状。在图1中,封装体p具备聚乙烯制桶体p1和特卫强(商标)制的上表面密封件p2。在本第一实施方式中,以在其内部收纳许多在预灌封注射器的填充作业中使用的杀菌后的注射器且被密封的状态被除污。
58.接着,对本第一实施方式的连续除污装置进行说明。图3是在本第一实施方式的竖型连续除污装置的主视图中示出内部的状态的概略剖视图。本第一实施方式的连续除污装置具备:由除污区域和通风区域构成的装置主体、运送封装体p的运送装置、雾供给装置及通风装置(通风用的清洁空气的供排气装置)。需要说明的是,本第一实施方式的连续除污装置是在除污区域和通风区域中在升降方向上运送封装体p的竖型连续除污装置。
59.在图3中,本第一实施方式的连续除污装置10的装置主体10a的周围被由不锈钢制金属板构成的外壁部覆盖,该装置主体10a与隔离器20的侧壁21连接地载置于地板面上。装置主体10a被划分为除污区域11和通风区域12。另外,除污区域11被划分为除污区域主体11a和导入区域11b。需要说明的是,在导入区域11b的一侧的壁部设置有向连续除污装置10的内部搬入封装体p的搬入口13。另一方面,通风区域12被划分为通风区域主体12a和导出区域12b。需要说明的是,在导出区域12b的一侧的壁部设置有搬出封装体p的搬出口14,与隔离器20的侧壁21连通。
60.需要说明的是,在本第一实施方式中,在装置主体10a的除污区域主体11a的部分和通风区域主体12a的部分处,使装置容量(区域的长度)可变化。具体而言,在图3中,除污
区域主体11a由与导入区域11b相接的除污区域第一部分11a(1)(图示左侧)、装置上部的除污区域第二部分11a(2)(图示上侧)及与通风区域主体12a相接的除污区域第三部分11a(3)(图示右侧上约一半)构成。相对于此,通风区域主体12a由除污区域第三部分11a(3)与导出区域12b之间的部分构成。
61.这样除污区域主体11a与通风区域主体12a相比装置容量大的理由如下。在本发明中,高效地利用微细的过氧化氢水雾来谋求除污水平的均等和可靠性,并且由于使用少量的过氧化氢水雾,所以通风的效率良好。由此,除污区域主体11a与通风区域主体12a相比装置容量变大,但作为整体,即使与以往的装置相比为同等或其以下,也能够实现除污对象物品的大量处理。
62.在装置主体10a的内部配置有运送封装体p的运送装置30。该运送装置30由物品运送装置31和支撑改换装置32构成。另外,物品运送装置31具有从除污区域第一部分11a(1)朝向除污区域第二部分11a(2)而将封装体p向上升方向(从底部到顶部)运送的滚动输送机31a和从除污区域第二部分11a(2)经由除污区域第三部分11a(3)而在通风区域主体12a的内部将封装体p向下降方向(从顶部到底部)运送的滚动输送机31b。
63.而且,物品运送装置31具有将封装体p从导入区域11b的搬入口13运送至除污区域第一部分11a(1)的底部的辊式输送机31c和将封装体p从通风区域主体12a的底部运送至导出区域12b的搬出口14的辊式输送机31d。另一方面,支撑改换装置32设置于除污区域第二部分11a(2),从滚动输送机31a的顶部拆下封装体p且使其支撑于滚动输送机31b的顶部。在本发明中,支撑改换装置32的工作机构不特别限定。例如,可以是推动封装体p的推动装置(推杆)或把持并挪动封装体p的把持装置(夹具)等。需要说明的是,在本第一实施方式中,采用了推杆32。关于该推杆32的工作将后述。
64.需要说明的是,运送封装体p的运送装置的种类不特别限定。将载置物品的底壁面而运送的辊式输送机、网式输送机等输送机装置或担载侧面部而运送的正时带、正时升降机、滚动输送机、穿梭输送机等担载装置组合而使用即可。
65.在此,对在本第一实施方式中采用的滚动输送机的构造和工作进行说明。需要说明的是,滚动输送机31a、31b具有同样的构造,对滚动输送机31a进行说明。在图3中,滚动输送机31a为了从两侧面担载封装体p而具有相同构造的两组担载体。在图3中,仅记载了一个担载体,另一个担载体隐藏于图的里侧。
66.各担载体由两根驱动轴33a和跨设于这些驱动轴的多个支撑杆34a构成(图3参照)。两根驱动轴33a分别由从除污区域第一部分11a(1)到除污区域第二部分11a(2)在垂直方向上配置的环状链条构成,通过驱动机构(未图示)而在上下方向上环绕。这样,通过两根驱动轴33a在上下方向上环绕,多个支撑杆34a也沿着其而在上下方向上环绕。
67.该环绕的多个支撑杆34a从两侧面担载封装体p并在除污区域第一部分11a(1)的内部向上升方向(从底部到顶部)运送。需要说明的是,具有相同的构造的滚动输送机31b通过驱动机构而向相反方向旋转,在除污区域第三部分11a(3)及通风区域主体12a的内部向下降方向(从顶部到底部)运送封装体p。
68.接着,对支撑杆34a从两侧面担载封装体p的状态进行说明。图4是示出本第一实施方式的滚动输送机31a担载封装体p的状态的(a)主视图、(b)侧视图。需要说明的是,在图4中,仅记载了支撑杆34a而省略了驱动轴33a。在图4中,支撑杆34a从两侧面担载封装体p的
第一肩部p3a。在该状态下,封装体p由滚动输送机31a在除污区域第一部分11a(1)的内部向上升方向(从底部到顶部)运送(参照图3)。需要说明的是,在封装体p中,在第一肩部p3a的下方存在第二肩部p3b。关于该第二肩部p3b的作用将后述。
69.在这样的结构中,对连续除污装置10的内部的状态及除污操作进行说明。在图3中,处于外部环境的作业者(未图示)将多个封装体p载置于驱动的辊式输送机31c上。封装体p以载置于驱动的辊式输送机31c的状态经由导入区域11b的搬入口13而被向导入区域11b的内部搬入。
70.接着,封装体p被向除污区域第一部分11a(1)的内部搬入,被担载于滚动输送机31a。在此,辊式输送机31c和滚动输送机31a交替地间歇工作。具体而言,在滚动输送机31a停止的状态下辊式输送机31c工作,将封装体p运送至滚动输送机31a的底部并且停止。接着,在辊式输送机31c停止的状态下滚动输送机31a工作,在利用滚动输送机31a的支撑杆34a从两侧面担载第一肩部p3a的状态下,在除污区域第一部分11a(1)的内部向上升方向运送一步并停止。这样,辊式输送机31c与滚动输送机31a交替地间歇工作,将封装体p从除污区域第一部分11a(1)的底部运送至顶部。
71.在除污区域第一部分11a(1)及除污区域第二部分11a(2)的侧壁面配置有多个雾供给装置40(在图3中是六台),从侧面向由滚动输送机31a运送的封装体p放出过氧化氢水雾41。由此,过氧化氢水雾41均匀地充满除污区域主体11a的内部全域,一边运送多个封装体p一边连续地除污。需要说明的是,关于雾供给装置40后述。
72.这样,在除污区域主体11a的内部处于除污状态的封装体p经由除污区域第一部分11a(1)的顶部而被向除污区域第二部分11a(2)的内部搬入。在此,推杆32工作而从滚动输送机31a的顶部拆下封装体p,并使其支撑于滚动输送机31b的顶部。
73.在此,对推杆32的工作进行说明。在图3中,推杆32具备在除污区域第二部分11a(2)的内部在水平方向上伸缩工作的缸32a。处于滚动输送机31a的顶部的封装体p通过推杆32的缸32a伸长而被推出,从滚动输送机31a的顶部一边滑动一边被拆下。接着,通过缸32a进一步伸长,而封装体p支撑于另一个滚动输送机31b的顶部。在该推杆32的工作状态下,滚动输送机31a和滚动输送机31b都停止。
74.图5是示出从滚动输送机31a利用推杆32将封装体p换载到了滚动输送机31b的状态的(c)主视图、(d)侧视图。需要说明的是,在图5中,仅记载支撑杆34b而省略了驱动轴33b。在图5中,支撑杆34b从两侧面担载封装体p的第二肩部p3b。
75.在此,对将支撑杆担载封装体p的部位从第一肩部p3a变更为第二肩部p3b的理由进行说明。担载于滚动输送机31a的封装体p的第一肩部p3a与支撑杆34a接触。因此,在除污行程中过氧化氢水雾无法充分接触,在该部分处,存在均匀的过氧化氢薄膜无法冷凝而除污效果下降的可能性。于是,能够通过将担载部分从第一肩部p3a变更为第二肩部p3b,而对封装体p的全部的外表面进行完全除污。
76.接着,支撑于滚动输送机31b的顶部的封装体p伴随于滚动输送机31b的间歇工作而在除污区域第三部分11a(3)的内部被向下降方向(从顶部到底部)运送。在该状态下,在封装体p的外表面冷凝有均匀的过氧化氢薄膜,进行除污。这样,封装体p通过一边由滚动输送机31a、31b运送一边在除污区域主体11a的内部滞留预先设定的时间,而外表面整体被均匀地除污。
77.接着,封装体p以支撑于滚动输送机31b的状态被向下降方向运送,被向通风区域主体12a的内部搬入。被搬入到通风区域主体12a的内部的封装体p一边在通风区域主体12a的内部被向下降方向运送一边被进行通风。具体而言,利用通风装置的供气装置50向通风区域主体12a的内部供给清洁空气。另外,利用通风装置的排气装置(未图示)将通风区域主体12a的内部的空气(包含气化的过氧化氢和过氧化氢水雾)强制性地排出。另外,强制性地排出的空气中的过氧化氢被过氧化氢分解装置51分解为氧和水。
78.需要说明的是,通风操作中的清洁空气的供排气量和通风时间设为预先设定的条件。这样,封装体p一边在通风区域主体12a的内部被运送一边被通风,冷凝于表面的过氧化氢薄膜被排除而成为除污操作完成了的状态。
79.接着,封装体p在通风区域主体12a的底部从滚动输送机31b被载置到辊式输送机31d。在此,滚动输送机31b与辊式输送机31d交替地间歇工作。具体而言,在辊式输送机31d停止的状态下滚动输送机31b工作,将封装体p运送至滚动输送机31b的底部而停止。接着,在滚动输送机31b停止的状态下辊式输送机31d工作,从滚动输送机31b的支撑杆34b拆下封装体p,以载置于辊式输送机31d的状态,经由导出区域12b的搬出口14而向隔离器20的内部搬入。
80.这样,关于除污操作完成而被搬入到隔离器20的内部的封装体p,在隔离器20内从封装体p将上表面密封件p2剥开,对内部的杀菌后的注射器或药瓶进行填充作业。
81.接着,对雾供给装置40进行说明。在本第一实施方式中,作为雾供给装置40而使用超声波雾化装置40。该超声波雾化装置40配置于除污区域主体11a的侧壁面,从侧面朝向由滚动输送机31a运送的封装体p放出过氧化氢水雾41(参照图3)。需要说明的是,对于超声波雾化装置40,从配置于除污区域主体11a的外部的过氧化氢水罐42供给过氧化氢水。能够通过控制该过氧化氢水的供给量(消耗量),来对封装体p的外表面适当地进行除污。
82.需要说明的是,在本发明中,关于超声波雾化装置40的构造不特别限定。例如,能够利用通过向过氧化氢水的液体中投入压电振子而雾化的浸渍型超声波雾化装置。另外,也可以使用具备压电振子和通过该压电振子的振动而将过氧化氢水雾化的多个微细孔贯通表背而设置的多孔振动板的圆盘网型雾化装置。需要说明的是,在本第一实施方式中,采用圆盘网型雾化装置,从多孔振动板的一个面供给过氧化氢水,并将从另一个面放出的过氧化氢水雾向除污区域主体11a的内部供给。
83.需要说明的是,如上所述,利用超声波雾化装置40产生的过氧化氢水雾成为包含雾、浓雾、微细的液滴的微细粒子而均匀地浮游于除污区域主体11a的内部。由此,冷凝于在除污区域主体11a的内部上升移动或下降移动的封装体p的外表面整体而形成均匀且薄层的过氧化氢水膜。该薄层的过氧化氢水膜在过氧化氢水与过氧化氢气体之间反复进行冷凝和蒸发的相变化,发挥封装体p的高度的除污效果。
84.另外,通过冷凝于封装体p的外表面整体的均匀且薄层的过氧化氢水膜反复进行再蒸发和冷凝,能够提高过氧化氢水雾中的过氧化氢水浓度,能够以少量的过氧化氢水实现效率较高的除污。另外,因为能够以少量的过氧化氢水高效地进行除污,所以残留于封装体p的表面的过氧化氢水膜的通风的效率也提高,能够实现除污操作的短时间化。
85.由此,根据上述第一实施方式,能够提供一种连续除污装置,不使用昂贵的电子加速器而采用近年来广泛使用的过氧化氢等除污剂,能够实现短时间处理、各部位的除污水
平均等,能够实现除污对象物品的大量处理。
86.《第二实施方式》
87.本第二实施方式相对于上述第一实施方式的竖型连续除污装置,涉及横型连续除污装置。需要说明的是,作为除污对象的收纳体(封装体)是与上述第一实施方式相同的封装体p。
88.对本第二实施方式的连续除污装置进行说明。图6是在本第二实施方式的连续除污装置的主视图中示出内部的状态的概略剖视图。本第二实施方式的连续除污装置与上述第一实施方式相同地具备由除污区域和通风区域构成的装置主体、运送封装体p的运送装置、雾供给装置及通风装置(通风用的清洁空气的供排气装置)。需要说明的是,本第二实施方式的连续除污装置是在除污区域和通风区域中在水平方向上运送封装体p的横型连续除污装置。
89.在图6中,本第二实施方式的横型连续除污装置110的装置主体110a的周围被由不锈钢制金属板构成的外壁部覆盖,该装置主体110a与隔离器120的侧壁121连接并载置于地板面上。装置主体110a被划分为除污区域111和通风区域112。另外,除污区域111被划分为除污区域主体111a和导入区域111b。需要说明的是,在导入区域111b的一侧的壁部设置有向连续除污装置110的内部搬入封装体p的搬入口113。另一方面,在通风区域112的一侧的壁部设置有搬出封装体p的搬出口114,与隔离器120的侧壁121连通。
90.在装置主体110a的内部配置有运送封装体p的运送装置130。该运送装置130由物品运送装置131和支撑改换装置132构成。另外,物品运送装置131具有:在除污区域主体111a的内部在水平方向上运送封装体p的悬挂输送机131a、从导入区域111b的搬入口113到除污区域主体111a的导入部为止在水平方向上运送封装体p的辊式输送机131b及从通风区域112的内部到搬出口114为止在水平方向上运送封装体p的辊式输送机131c。另一方面,支撑改换装置132设置于除污区域主体111a的中途区域,从悬挂输送机131a拆下封装体p,改变支撑部而使其再次支撑于悬挂输送机131a。
91.需要说明的是,运送封装体p的运送装置的种类不特别限定。将载置物品的底壁面而运送的辊式输送机、网式输送机等输送机装置或担载侧面部而运送的正时带、正时升降机、滚动输送机、穿梭输送机等担载装置组合而使用即可。
92.在此,对在本第二实施方式中采用的悬挂输送机的构造和工作进行说明。在图6中,悬挂输送机131a为了从两侧面担载封装体p而具有相同构造的两组担载体。在图6中,仅记载了一个担载体,另一个担载体隐藏于图的里侧。
93.各担载体由两根驱动轴133a和分别配置于这些驱动轴的多个支撑杆134a构成(参照图6)。需要说明的是,支撑杆134a是l字形的杆,从驱动轴133a向下方悬吊。两根驱动轴133a分别由在水平方向上配置于除污区域主体111a的环状链条构成,通过驱动机构(未图示)而在水平方向(图示左右方向)上环绕。这样,通过两根驱动轴133a在水平方向上环绕,多个支撑杆134a也沿着其而在水平方向上环绕。该环绕的多个支撑杆134a从两侧面担载封装体p而在除污区域主体111a的内部在水平方向(图示右方向)上运送。
94.接着,对支撑杆134a从两侧面担载封装体p的状态进行说明。图7是示出本第二实施方式的悬挂输送机131a担载封装体p的状态的(a)主视图、(b)侧视图。需要说明的是,在图7中,仅记载支撑杆134a而省略了驱动轴133a。在图7中,支撑杆134a从两侧面担载封装体
p的第一肩部p3a。在该状态下,封装体p由悬挂输送机131a在除污区域主体111a的内部在水平方向上运送(参照图6)。需要说明的是,在封装体p中,在第一肩部p3a的下方存在第二肩部p3b。关于该第二肩部p3b的作用将后述。
95.在这样的结构中,对连续除污装置110的内部的状态及除污操作进行说明。在图6中,处于外部环境的作业者(未图示)将多个封装体p载置于驱动的辊式输送机131b上。封装体p以载置于驱动的辊式输送机131b的状态经由导入区域111b的搬入口113而被向导入区域111b的内部搬入。
96.接着,封装体p被向除污区域主体111a的内部搬入,从辊式输送机131b被支撑于悬挂输送机131a。需要说明的是,从辊式输送机131b向悬挂输送机131a换载的工作与上述第一实施方式相同地基于辊式输送机131b和悬挂输送机131a的交替的间歇工作。支撑于悬挂输送机131a的封装体p在除污区域主体111a的内部被在水平方向上运送。在除污区域主体111a的上壁面配置有多个雾供给装置140(在图6中是三台),从上表面朝向由悬挂输送机131a运送的封装体p放出过氧化氢水雾141。
97.由此,过氧化氢水雾141均匀地充满除污区域主体111a的内部,一边运送多个封装体p一边连续地除污。需要说明的是,关于雾供给装置140将后述。这样,封装体p通过一边由悬挂输送机131a运送一边在除污区域主体111a的内部滞留预先设定的时间,而外表面整体被均匀地除污。
98.这样,关于在除污区域主体111a的内部处于除污状态的封装体p,在除污区域主体111a的中途区域中支撑改换装置132工作而进行悬挂输送机131a处的换载。在此,支撑改换装置132的构造不管是何种构造都行。需要说明的是,在本第二实施方式中,采用了与上述第一实施方式相同的推杆132。在图6中,除污区域主体111a的行进方向被表示为直线状。但是,不限定于此,也可以在支撑改换装置132的位置处使除污区域主体111a的行进方向变化。例如,通过使其变化90
°
,而除污区域主体111a成为水平l字状,也能够应对横型连续除污装置110的设置场所的制约。
99.图8是示出在悬挂输送机131a中换载了封装体p的状态的(c)主视图、(d)侧视图。需要说明的是,在图8中,仅记载支撑杆134b而省略了驱动轴133b。在图8中,支撑杆134b从两侧面担载封装体p的第二肩部p3b。需要说明的是,关于将支撑杆担载封装体p的部位从第一肩部p3a变更为第二肩部p3b的理由,与上述第一实施方式相同。
100.接着,到达了除污区域主体111a的端部的封装体p被搬入到通风区域主体12a的内部,从悬挂输送机131a被支撑于辊式输送机131c。在该状态下,在由悬挂输送机131a运送至通风区域112的导入部的封装体p的外表面还冷凝有过氧化氢薄膜。
101.接着,被搬入到通风区域112的内部的封装体p一边在通风区域112的内部被在水平方向上运送一边被进行通风。具体而言,利用通风装置的供气装置150向通风区域112的内部供给清洁空气。另外,利用通风装置的排气装置(未图示)将通风区域112的内部的空气(包含气化的过氧化氢和过氧化氢水雾)强制性地排出。另外,强制性地排出的空气中的过氧化氢由过氧化氢分解装置151分解成氧和水。
102.需要说明的是,通风操作中的清洁空气的供排气量和通风时间设为预先设定的条件。这样,封装体p一边在通风区域112的内部被运送一边被通风,冷凝于表面的过氧化氢薄膜被排除而成为除污操作完成的状态。
103.接着,封装体p以载置于辊式输送机131c的状态经由通风区域112的搬出口114而被搬入到隔离器120的内部。
104.这样,关于除污操作完成而被搬入到隔离器120的内部的封装体p,在隔离器120内从封装体p将上表面密封件p2剥开,对内部的杀菌后的注射器或药瓶进行填充作业。
105.接着,对雾供给装置140进行说明。在本第二实施方式中,作为雾供给装置140而使用与上述第一实施方式相同的超声波雾化装置140。该超声波雾化装置140配置于除污区域主体111a的上壁面,从上表面朝向由悬挂输送机131a运送的封装体p放出过氧化氢水雾141(参照图6)。需要说明的是,对于超声波雾化装置140,从配置于除污区域主体111a的外部的过氧化氢水罐142供给过氧化氢水。能够通过控制该过氧化氢水的供给量(消耗量),而对封装体p的外表面适当地进行除污。
106.需要说明的是,关于超声波雾化装置140的构造,不特别限定。需要说明的是,在本第二实施方式中,采用了与上述第一实施方式相同的圆盘网型雾化装置。
107.需要说明的是,如上所述,利用超声波雾化装置140产生的过氧化氢水雾成为包含雾、浓雾、微细的液滴的微细粒子而均匀地浮游于除污区域主体111a的内部。由此,冷凝于在除污区域主体111a的内部水平移动的封装体p的外表面整体而形成均匀且薄层的过氧化氢水膜。该薄层的过氧化氢水膜在过氧化氢水与过氧化氢气体之间反复进行冷凝与蒸发的相变化,发挥封装体p的高度的除污效果。
108.另外,通过冷凝于封装体p的外表面整体的均匀且薄层的过氧化氢水膜反复进行再蒸发与冷凝,能够提高过氧化氢水雾中的过氧化氢水浓度,能够以少量的过氧化氢水实现效率较高的除污。另外,因为能够以少量的过氧化氢水高效地除污,所以残留于封装体p的表面的过氧化氢水膜的通风的效率也提高,能够实现除污操作的短时间化。
109.由此,根据上述第二实施方式,能够提供一种连续除污装置,不使用昂贵的电子加速器而采用近年来广泛使用的过氧化氢等除污剂,能够实现短时间处理、各部位的除污水平均等,能够实现除污对象物品的大量处理。
110.需要说明的是,在本发明的实施时,不限于上述各实施方式,可举出以下这样的各种变形例。
111.(1)在上述的各实施方式中,利用滚动输送机或悬挂输送机的支撑杆担载封装体p。但是,不限定于此,也可以取代支撑杆而利用支撑爪来担载封装体p。将该状态在图9中示出。在图9中,封装体p的肩部在两根支撑爪的顶端部的点处被支撑。由此,在担载部分(点)处也可抑制除污状态下降。
112.(2)在上述的各实施方式中,作为换载封装体p的机构而采用了推动装置(推杆)。但是,不限定于此,也可以采用把持装置(夹具)而将封装体p以利用夹具把持的状态进行换载。需要说明的是,在采用了夹具的情况下,也能够将封装体p以使其旋转了90
°
的状态换载。
113.(3)在上述的各实施方式中,在除污区域主体的中途利用推动装置(推杆)换载封装体p。但是,不限定于此,也可以采用针对一边间歇工作一边上升的滚动输送机的每一步进行换载的机构。另外,在悬挂输送机中,也同样可以采用针对每一步进行换载的机构。
114.(4)在上述的各实施方式中,在换载封装体p时,在封装体p的同一侧面的第一肩部和第二肩部处进行换载。但是,不限定于此,也可以在封装体p的其他侧面的第一肩部或第
二肩部处换载。
115.(5)在上述的各实施方式中,在换载封装体p时,在封装体p的同一侧面的第一肩部和第二肩部处换载。但是,不限定于此,也可以在封装体p的肩部与底面部处进行换载。
116.附图标记说明
117.10、110
…
连续除污装置,10a、110a
…
装置主体,11、111
…
除污区域,11a(11a(1)、11a(2)、11a(3))、111a
…
除污区域主体,
118.11b、111b
…
导入区域,12、112
…
通风区域,
119.12a
…
通风区域主体,12b
…
导出区域,
120.13、113
…
搬入口,14、114
…
搬出口,
121.20、120
…
隔离器,21、121
…
侧壁,30、130
…
运送装置,
122.31a、31b
…
滚动输送机,131a
…
悬挂输送机,
123.31c、31d、131b、131c
…
辊式输送机,
124.32、132
…
支撑改换装置(推杆),32a
…
缸,
125.33a、34b、133a、134b
…
驱动轴,
126.34a、34b、134a、134b、234a
…
支撑杆,
127.234c
…
支撑爪,
128.40、140
…
雾放出装置,41、141
…
过氧化氢水雾,
129.42、142
…
过氧化氢水罐,50、150
…
供气装置,
130.51、151
…
过氧化氢分解装置,p
…
封装体,p1
…
桶体,
131.p2
…
上表面密封件,p3
…
侧面肩部,p3a
…
第一肩部,p3b
…
第二肩部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1