用于固定导航跟踪器的纳米纤维粘合剂的制作方法
用于固定导航跟踪器的纳米纤维粘合剂
1.相关申请
2.本技术要求于2020年8月4日提交的并且名称为“用于固定导航跟踪器的纳米纤维粘合剂(nanofiber adhesves for navigation tracker fixation)”的美国临时专利申请号63/060,937的权益,该申请的内容据此全文以引用的方式并入。
技术领域
3.本公开整体涉及医疗装置领域。更具体地,一些实施方案涉及将医疗装置附着到组织的纳米纤维粘合剂。
附图说明
4.本文的书面公开内容描述了非限制性和非穷举性的例示性实施方案。参考附图中描述的此类例示性实施方案中的某些例示性实施方案,附图中:
5.图1是根据本公开的一个实施方案的附接到患者的组织的跟踪器系统的侧视图。
6.图2是图1的跟踪器系统的顶视图,其中跟踪器线圈以虚线示出。
7.图3是根据本公开的一个实施方案的设置在纳米纤维包壳内的跟踪器系统的侧视图。
8.图4示出了根据本公开的一个实施方案的附着到患者的口腔粘膜的跟踪器系统。
9.图5示出了根据本公开的一个实施方案的附着到患者脊柱的骨膜的跟踪器系统。
10.图6是根据本公开的一个实施方案的跟踪器系统的侧视图。
11.图7是图6的跟踪器系统的图像(诸如x射线、ct或mri图像)的示意性表示。
12.图8是根据本公开的一个实施方案的跟踪器系统的侧视图。
13.图9是图8的跟踪器系统的图像(诸如x射线、ct或mri图像)的示意性表示。
14.图10是根据本公开的一个实施方案的跟踪器系统的侧视图。
15.图11是附接到弯曲组织表面的图10的跟踪器系统的侧视图,跟踪器系统适形于组织表面。
16.图12是根据本公开的一个实施方案的附接在两个组织表面之间的跟踪器系统的侧视图。
17.图13是附接在两个组织表面之间的图12的跟踪器系统的侧视图,跟踪器系统适形在两个组织表面之间。
18.图14是根据本公开的一个实施方案的附着到患者的组织的跟踪器系统的侧视图。
19.图15是在从患者的组织移除跟踪器系统之后图14的跟踪器系统的基垫的一部分的侧视图。
20.图16是根据本公开的另一实施方案的附着到患者的组织的跟踪器系统的端视图。
21.图17是在从患者的组织移除跟踪器系统之后图16的跟踪器系统的端视图,示出了附着到组织的跟踪器系统的基垫的一部分。
具体实施方式
22.执业医生可在图像引导的导航医疗规程期间使用外科导航系统。患者跟踪器可与这些导航系统结合使用以定位或识别解剖结构和/或映射参考空间内的那些位置。经由患者配准建立定位患者解剖结构和/或映射解剖位置的能力。配准是指用于将患者的三维位置与用于导航的术前和术中图像相匹配的计算机化过程。此类导航系统可在多种规程中使用,包括开放规程、微创规程和经皮规程。然后,由患者跟踪器识别的位置可用于在外科手术期间将治疗装备引导到特定位置和取向,和/或可用于跟踪解剖位置的位置或对准。
23.一些实施方案将跟踪器附连到患者。例如,通过对这些跟踪器连同感兴趣的治疗点(诸如肿瘤)进行成像,将这些跟踪器的位置映射到患者的图像空间(或参考空间)内。然后,跟踪器可提供信息以帮助外科医生将治疗装备相对于肿瘤引导和取向。例如,一些实施方案使用电磁跟踪器。在治疗期间,可在目标位置周围感应电磁场。患者跟踪器与电磁场之间的交互可用于确定跟踪器(例如,具有六个自由度)在参考空间内的位置和取向(统称为姿态)。治疗装备也可相对于相同的参考空间进行控制。因此,患者跟踪器可被配置为提供一个或多个参考点以供在规程期间使用。在其他实施方案中,跟踪器可使用其他方法来提供姿态信息,诸如红外、无线电或超声发射器/后向反射器。关于跟踪器的附加信息可至少在2015年3月31日提交的名称为“模块化线圈组件(modular coil assembly)”的美国专利申请号14/673,994中找到,该美国专利申请全文据此以引用方式并入本文。
24.在一些情况下,患者跟踪器可通过粘合剂附着到患者的皮肤或通过螺钉附接到骨。虽然将跟踪器附着到皮肤比骨螺钉的侵入性小,但皮肤可能在放置跟踪器和拍摄初始图像的时间与规程的时间之间相对于骨或身体的其他部分显著地移位。在规程期间,皮肤也可相对于骨或身体的其他部分移动。另一方面,虽然将跟踪器拧到骨一般提供更积极、更固定的位置,但这种方法相对更具侵入性。可相对于骨或身体的其他部分固定并且微创的跟踪器将是有利的。
25.如下文进一步详细描述的,被配置为耦接到固定到骨的薄组织(诸如(但不限于)粘膜组织或骨的骨膜)的跟踪器可比螺钉具有更小的侵入性,同时在皮肤上提供比粘合剂更固定的位置。由于这样的组织可能趋于自然润湿,因此如下文详述的粘附系统可利用粘附剂的润湿或水合来将患者跟踪器耦接到组织。
26.如本文附图中大体描述和例示的实施方案的部件可以多种不同配置来布置和设计。因此,如附图中所表示的各种实施方案的以下更详细的描述并不旨在限制本公开的范围,而仅仅是各种实施方案的代表。尽管在附图中呈现了实施方案的各种方面,但除非特别指出,附图不必按比例绘制。
27.短语“耦接到”的范围大到足以指代两个或更多个实体之间的任何合适的耦接或其他形式的交互,包括机械、流体、电/磁和热相互作用。因此,两个部件可彼此耦接,即使它们彼此不直接接触。短语“附接到”或“直接附接到”是指彼此直接接触和/或仅通过任何合适种类的紧固件(例如,安装硬件或粘合剂)彼此分开的两个或更多个实体之间的交互。短语“流体连通”以其普通意义使用并且范围大到足以指代当元件彼此流体连通时,流体(例如,气体或液体)可从一个元件流到另一元件的布置。
28.术语“近侧”和“远侧”是相反方向的术语,并且适用于该领域通常使用的医疗装置。例如,被配置用于由医生直接操作的医疗装置的远侧端部是在正常使用期间离医生最
远的部件的端部。近侧端部是指相反端部,或者在正常使用期间最靠近医师的端部。
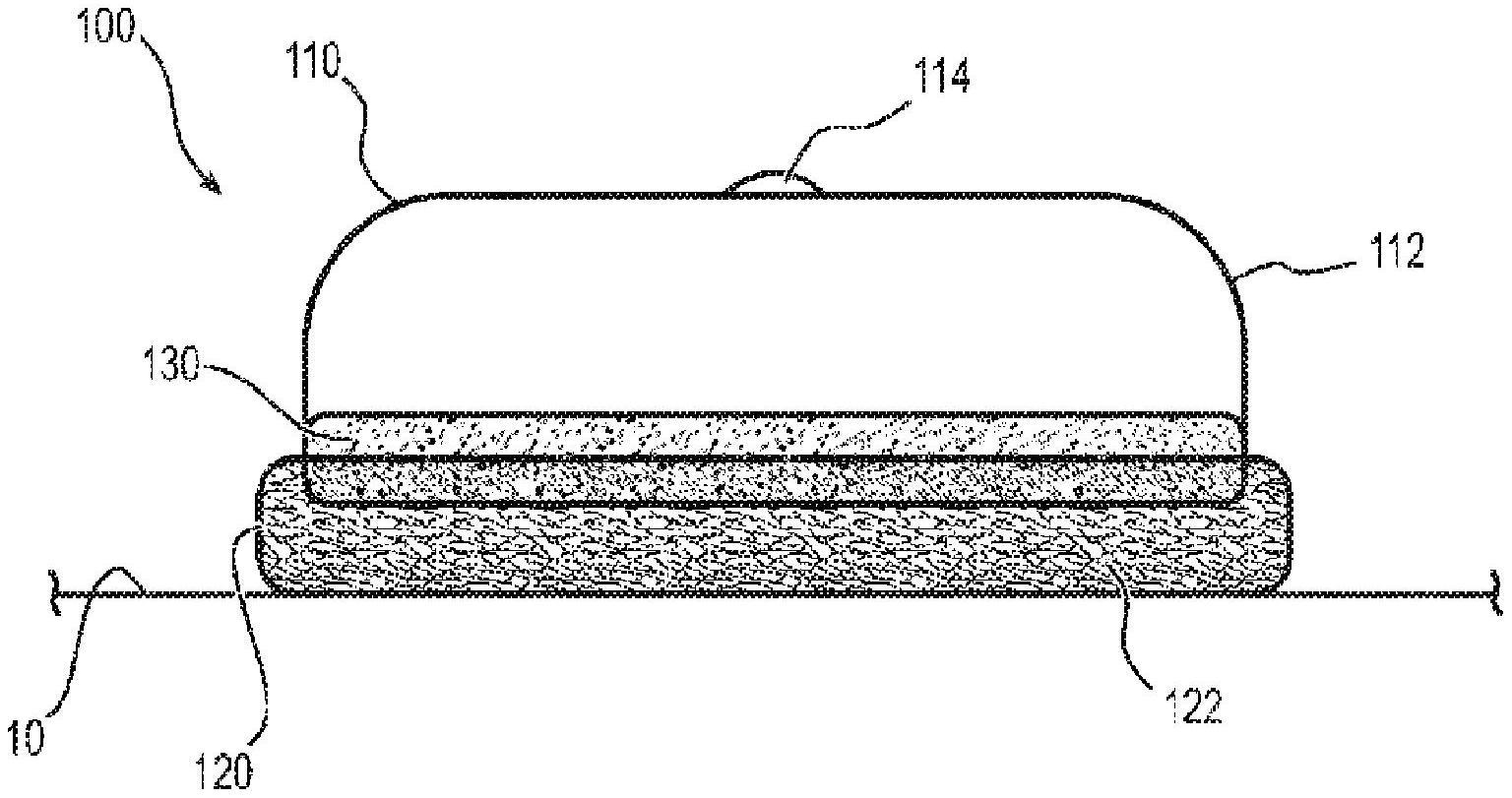
29.图1和图2示出了用于耦接到组织10以便在医疗规程期间使用以提供参考点的跟踪器系统100。跟踪器系统100可例如在耳鼻喉(ent)规程、颅规程、脊柱规程、心脏规程、肺规程等中使用。图1示出了跟踪器系统100的侧视图,并且图2示出了跟踪器系统100的顶视图。同样如上所述,一个或多个跟踪器系统(诸如跟踪器系统100)可用于在图像引导的导航系统中进行患者配准。配准是指用于将患者的三维位置与用于导航的术前和术中图像相匹配的计算机化过程。
30.跟踪器系统100可包括耦接到基垫120的导航跟踪器110(诸如电磁跟踪器)。导航跟踪器110可被配置为测量在医疗规程期间感应到的电磁场的强度和/或其他特性,然后将这些测量结果与空间中的三维点相关联以提供参考点。在其中跟踪器系统100固定到密切地或紧密地耦接到骨的组织10的实施方案中,可限制或最小化跟踪器系统100相对于骨的移位。这继而可最小化跟踪器系统100相对于目标区域(诸如肿瘤)的移位。
31.在一些实施方案中,目标区域可以是骨本身。例如,导航跟踪器110可附接到若干椎骨。可经由导航跟踪器110,通过将椎骨重新定位和重新取向的医疗规程来跟踪椎骨的位置和取向。
32.导航跟踪器110可包括壳体112。壳体112可由多种不同材料制成。例如,壳体112可由不会与电磁场不利地相互作用的聚合物材料制成。合适的材料包括聚氯乙烯(pvc)、聚丙烯(pp)、聚乙烯(pe)、聚苯乙烯(ps)、尼龙、聚对苯二甲酸乙二醇酯(pet)、聚酰亚胺(pa)、聚碳酸酯(pc)、丙烯腈丁二烯(abs)、聚醚醚酮(peek)、聚氨酯(pu)等。壳体112可为刚性的,或者壳体112可为柔性的。
33.导航跟踪器110还可包括电缆114。电缆114可将导航跟踪器110耦接到计算机或其他系统,该计算机或其他系统被配置为利用参考空间中的点从导航跟踪器110接收信息或向该导航跟踪器传输信息。电缆114可电耦接到导航跟踪器110内的线圈(诸如跟踪器116、118)。因此,通过电缆114的电流流动可用于围绕线圈(诸如跟踪器116、118)感应磁场和/或测量在线圈(诸如跟踪器116、118)中在它们受到外部磁场时感应的电流。例如,所测量的电流然后可与外部磁场内的位置相关,并因此与参考空间中的点相关。
34.附加地,电缆114还可被配置为便于从组织10移除跟踪器系统100。电缆114可放置在非对称位置,诸如放置在导航跟踪器110的边附近,以便于向导航跟踪器110的边和/或基垫120施加力。这种在边处施加的力可能趋于将导航跟踪器110和/或基垫120从组织10剥离,从而便于移除。
35.如上所述,导航跟踪器110可包括设置在壳体112内的跟踪器116、118。同样,电缆114可电耦接到跟踪器116、118。在一些实施方案中,跟踪器116、118包括导电线圈(诸如金属),这些导电线圈可在受到磁场时感应磁场和/或传导电流。在例示的实施方案中,导航跟踪器110包括两个不同的线圈设计。线圈116是棒状线圈,并且线圈118是圆形线圈。然而,附加线圈设计、形状和布局同样在本公开的范围内。
36.在一些实施方案中,跟踪器116、118可以是磁场传感器。磁场传感器的示例包括霍尔效应传感器、磁阻传感器、隧道结传感器、微机电系统(mems)、磁通门传感器等。
37.在例示的实施方案中,壳体112耦接到基垫120,该基垫被配置为将跟踪器系统100耦接到组织。在一些实施方案中,基垫120被配置为直接附着到某些组织。在例示的实施方
案中,基垫120包括多个纳米纤维122。纳米纤维可被配置为与组织10和/或设置在该组织表面上的流体直接相互作用,以将基垫120附着到组织10。例如,纳米纤维122可被配置为通过流体吸附、润湿、水合平衡和/或大分子互穿而附着到润湿组织10。
38.吸收是原子、离子或分子从气体、液体或溶解的固体附着到表面。润湿是指当液体和固体表面结合在一起时,由于分子间相互作用,液体保持与固体表面接触的能力。因此,随着基垫120的纳米纤维122与潮湿或润湿组织接触,纳米纤维122趋于通过与组织10上的水分相互作用而粘附到组织10上。
39.水合平衡还可能趋于帮助将基垫120耦接到组织10。水合平衡是指流体移动到最初不存在流体的基质中的开口中的趋势。换句话讲,组织10中的流体或液体渗入基垫120中,以在组织10表面上的流体量与基垫120中的流体量之间产生平衡。
40.吸收、润湿和水合平衡中的一种或全部可用于基垫120与组织10的初始耦接。大分子互穿可进一步将基垫120耦接到组织10。大分子互穿是指多个纳米纤维122与组织10表面上的大分子之间的相互作用。这些大分子可通过使表面在纳米级粗糙或多刺而影响组织10的表面特性。组织10中的大分子可穿透纳米纤维122并与纳米纤维122相互作用以将纳米纤维122附着或耦接到组织10。可能趋于穿透或以其他方式与基垫120的纳米纤维122相互作用的大分子的示例包括蛋白质、脂质、大环等。此外,蛋白质的示例包括糖基化蛋白质(粘蛋白、纤维蛋白等)、糖蛋白(纤连蛋白、玻连蛋白等)和胶原蛋白。在一些情况下,大分子互穿可被认为类似于钩环紧固件系统,其中组织10中的大分子延伸到由多个纳米纤维122形成的“环”中并“钩”在其周围。
41.纳米纤维122可以是织造的或非织造的。在例示的实施方案中,纳米纤维122是具有方形形状的非织造垫。然而,许多不同的垫形状在本公开的范围内,诸如三角形、圆形、梯形、多边形等。基垫120的尺寸可根据跟踪器系统100的预期用途和治疗的类型而变化。在一些实施方案中,方形基垫120可为约6mm
×
6mm;然而,其他尺寸和形状同样在本公开的范围内。例如,基垫的一个或多个尺寸可为约0.2mm至约20mm,包括约3mm至约15mm和约3mm至约10mm。
42.纳米纤维122可由多种不同材料制成。例如,纳米纤维122可以是可生物吸收的、可生物再吸收的或不可再吸收的。在一些实施方案中,纳米纤维122是可生物吸收的。潜在材料的示例包括聚合物、聚乳酸、聚-d/l-乳酸(pdla)、聚-l/l-乳酸(plla)等。在一些实施方案中,纳米纤维122可具有10纳米与1微米之间的直径。纳米纤维122可以多种不同的方式形成。例如,纳米纤维122可通过拉伸、电纺丝、自组装、模板合成、热致相分离等形成。
43.基垫120可以多种不同的方式耦接到导航跟踪器110。例如,基垫120可通过粘合剂130(诸如凝胶粘合剂)耦接到导航跟踪器110。凝胶粘合剂的示例包括但不限于合成粘合剂(诸如丙烯酸树脂、氰基丙烯酸酯、硅酮、聚氨酯等)、生物粘合剂等。在一些实施方案中,导航跟踪器110可由趋于在无粘合剂的情况下耦接到基垫120的纳米纤维122的材料制造。换句话讲,基垫120的纳米纤维122本身可充当粘合剂以将导航跟踪器110耦接到基垫120。
44.图3描绘了在某些方面类似于上述跟踪器系统100的跟踪器系统200的实施方案。因此,相似的特征用相似的附图标记来表示,其中前导数字递增至“2”。例如,图3中所描绘的实施方案包括导航跟踪器210,该导航跟踪器在一些方面可类似于图1和图2的导航跟踪器110。因此,下文可能不再重复上文关于类似识别的特征的相关公开内容。此外,图1和图2
所示的跟踪器系统100和相关部件的具体特征可能未在附图中用附图标记示出或识别,或者在随后的书面描述中未具体讨论。然而,此类特征可能与其他实施方案中描绘的和/或关于这些实施方案描述的特征明显相同或基本上相同。因此,此类特征的相关描述同样适用于图3中描绘的跟踪器系统200和相关部件的特征。关于图1和图2所示的跟踪器系统100和相关部件描述的特征及其变型形式的任何合适组合可与图3的跟踪器系统200和相关部件一起使用,反之亦然。本公开的这种模式同样适用于在后续附图中描绘并在下文描述的另外的实施方案,其中前导数字可被进一步递增。
45.图3示出了包括完全设置在基垫220内的导航跟踪器210的跟踪器系统200。换句话讲,基垫220包围或包封导航跟踪器210。在其他实施方案中,导航跟踪器210可以是电磁跟踪器、红外跟踪器、无线电跟踪器或超声跟踪器。
46.在例示的实施方案中,导航跟踪器210是直角棱镜。其中导航跟踪器210是立方体或其他形状的实施方案同样在本公开的范围内。例如,导航跟踪器210可以是3mm
×
3mm
×
3mm立方体、6mm
×
6mm
×
6mm立方体或其中一个或多个边为从约0.2mm至约20mm的任何其他形状。其中基垫220围绕或基本上围绕导航跟踪器210设置的实施方案可便于将导航跟踪器210耦接到组织,因为导航跟踪器210的所有侧可趋于附着到组织10。在一些实施方案中,导航跟踪器210的外部的除电缆214以外的所有部分可覆盖有纳米纤维。在一些实施方案中,导航跟踪器210可包括设置在导航跟踪器210内的三个正交线圈(未示出)。然而,导航跟踪器210可包括多于或少于三个线圈。
47.在一些实施方案中,导航跟踪器210可具有长方体形状。例如,长方体的尺寸可以是具有1mm高度的5mm
×
5mm基部。同样,对于长方体形状,各种尺寸在本公开的范围内,包括从约3mm至约20mm的基线测量结果和大于或小于1mm的高度测量结果。
48.上文提到的尺寸本质上是例示性的而非限制性的。例如,一些跟踪器系统可能更大或更小。例如,在一些实施方案中,导航跟踪器210可被设计成容纳单个线圈。在此类实施方案中,导航跟踪器210可具有诸如0.2mm的外径和2mm的长度以容纳单个线圈。同样,还设想其他大小和尺寸。
49.如上所述,在一些规程中,跟踪器系统(诸如100和200)到润湿的相对固定组织(诸如口腔粘膜(齿龈)、骨膜等)的耦接可促进多种规程。图4示出了耦接到口腔粘膜的(图1的)跟踪器系统100。图5示出了耦接到脊柱的皮质骨的骨膜的跟踪器系统100。在其他实施方案中,跟踪器系统100可附着到其他组织,包括可对其具有更大弯曲或拉伸的较软组织,诸如脑、肺、心脏等。虽然图4和图5中的例示的实施方案示出了单个跟踪器系统100,但多个跟踪器系统100可沿着患者的身体的各部分放置以用于单个医疗规程。这些跟踪器系统可用于跟踪患者、脊柱节段的相对位置和取向、脑移位、肺呼吸、心脏搏动等。
50.在一些实施方案中,跟踪器系统100可包括设置在基垫120上或该基垫内的不透射线图案。例如,基垫120的纳米纤维122的一部分可以是不透射线的,因此产生执业医生可在医疗规程期间识别的x射线、ct或mri可成像图案。在一些实施方案中,自动化系统被配置为定位和识别图案。在一些实施方案中,基垫120的纳米纤维122的一部分以不透射线的方式布置,使得执业医生可在医疗规程期间识别。在一些实施方案中,自动化系统被配置为定位和识别图案。例如,图案可以是方形、星形、一系列平行线、三角形、圆形等。自动化系统可将该图案与规程的mri图像配准。
51.当基垫120变得润湿时,由于基垫120的水含量,基垫120在mri图像中显现。在一些实施方案中,纳米纤维122的一部分可由不透射线材料或聚合物制成。此类不透射线的纳米纤维可以便于经由x射线、ct或mri图像进行辨别或区分一个图像中的多个标记的图案或形状放置。在一些实施方案中,可将不透射线剂添加到用于制造纳米纤维122的材料或聚合物中,从而使纳米纤维122不透射线。
52.在单个医疗规程期间可使用多个跟踪器系统100。多个跟踪器系统100可各自具有不同的图案,使得执业医生知道哪个图案与每个跟踪器系统100相关联。在一些实施方案中,自动化系统被配置为定位和识别图案。由于不同的跟踪器系统100可在规程期间附着到组织,因此执业医生知道哪个跟踪器系统在三维空间中相关联,以帮助执业医生在规程期间导航。
53.图6至图9描绘了产生x射线、ct或mri可成像图案的跟踪器系统的两个实施方案。图6示出了包括部分地设置在基垫320内的导航跟踪器310的跟踪器系统300。在一些实施方案中,导航跟踪器310可以是电磁跟踪器、红外跟踪器、无线电跟踪器或超声跟踪器。基垫320包括多个不透射线的纳米纤维322。图7是作为x射线、ct或mri图像的跟踪器系统300的示意性表示。例如,基垫320的不透射线纳米纤维322可产生执业医生可在医疗规程期间识别的基本上u形的横截面图案或图像。当从不同的二维视图或三维重建观察时,可看到其他图案或图像。
54.在一些实施方案中,跟踪器(例如,金属线圈)直接设置在基垫中,而不设置在单独的跟踪器壳体中。图8示出了具有包括多个纳米纤维422的基垫420的跟踪器系统400。跟踪器系统400的例示的实施方案不包括跟踪器壳体,并且跟踪器(例如,金属线圈)可直接设置在基垫420内。然而,跟踪器系统400可包括跟踪器,该跟踪器设置在侧壁424之间。基垫420还可包括一对侧壁424,该对侧壁设置在距基垫420的边缘预定距离处。在侧壁424与基垫420之间重叠的纳米纤维422可以是不透射线的。图9是作为x射线、ct或mri图像的跟踪器系统400的图像的示意性表示。基垫420的不透射线纳米纤维422产生矩形形状426或执业医生可在医疗规程期间识别的图像。在一些实施方案中,自动化系统被配置为定位和识别图案。
55.如图10至图13所示,在一些实施方案中,跟踪器系统500可以是适形的。这便于在跟踪器系统500附着在不平坦的组织10时或在跟踪器系统600附着在两个润湿组织10、20之间的情况下进行耦接。图10示出了跟踪器系统500的侧视图。跟踪器系统500可包括设置在纳米纤维522的基垫520内而无单独跟踪器壳体的跟踪器518(例如,金属线圈)。基垫520可具有其中设置有跟踪器518的长方体形状。然而,在本公开的范围内,基垫520可具有许多不同的形状。图11示出了附着到不平坦的润湿组织10的跟踪器系统500,其中基垫520的形状和跟踪器518的形状符合不平坦的润湿组织10的形状。虽然图10和图11中未示出,但跟踪器系统500还可包括电缆,以向跟踪器518供电或者传送如上文所公开的信号。
56.图12示出了包括设置在基垫620内的跟踪器618(例如,金属线圈)而无单独跟踪器壳体的跟踪器系统600。基垫620可具有其中设置有跟踪器618的长方体形状。然而,在本公开的范围内,基垫620可具有许多不同的形状。跟踪器系统600示为附着在两个润湿组织10、20之间。图13示出了符合两个润湿组织10、20之间的形状的跟踪器系统600。跟踪器系统600可因芯吸和/或盐水施加等而膨胀。换句话讲,基垫620膨胀以符合两个组织10、20,并且线圈被配置为相对于基垫620的膨胀而膨胀和伸长。
57.图14和图15示出了移除附着到组织10的跟踪器系统700的一个过程。图14示出了包括经由粘合剂730耦接到基垫720的导航跟踪器710的跟踪器系统700。在一些实施方案中,导航跟踪器710可以是电磁跟踪器、红外跟踪器、无线电跟踪器或超声跟踪器。基垫720包括附着到组织10的多个非织造纳米纤维722。如上文所讨论的,组织10可以是固定的或移动的组织。基垫720的纳米纤维722被配置为以多种不同方式附着到润湿组织10,诸如吸附、润湿、水合平衡和大分子互穿。换句话讲,多个纳米纤维722可与组织10相互作用以将基垫720耦接到组织10。
58.导航跟踪器710可包括壳体712和延伸到导航跟踪器710的壳体712中的电缆714。设置在壳体712内的可以是多个跟踪器716。在例示的实施方案中,跟踪器716可以是导电线圈,诸如金属。跟踪器716与电缆714电连通。电缆714的第一端部耦接到电源、计算机、信号读取器等,并且电缆714的第二端部包括引线715。引线715与跟踪器716的引线连通,以向跟踪器716提供电力或传导信号或电流远离跟踪器716。
59.如在其他实施方案中所指出的,电缆714还可便于从组织10移除跟踪器系统700。电缆714可被置于非对称位置以帮助从基垫720移除导航跟踪器710。电缆714的非对称位置可使得执业医生能够以趋于将基垫720从组织10剥离的方式拉动电缆714。在一些实施方案中,基垫720的一部分可保留在组织10上,如图15所示。在一些实施方案中,电缆714可被置于对称位置。
60.因此,在一些治疗之后,基垫720的一部分可保持附着到组织10,而基垫720的一部分保持耦接到导航跟踪器710。如先前所讨论的,如果基垫720的纳米纤维722由可生物吸收的纳米纤维制成,则基垫720的保持附着到组织10的部分将被患者的身体重新吸收。
61.图16和图17示出了移除附着到组织10的另一跟踪器系统800的过程。图16示出了包括耦接到基垫820的导航跟踪器810的跟踪器系统800。在一些实施方案中,导航跟踪器810可以是电磁跟踪器、红外跟踪器、无线电跟踪器或超声跟踪器。跟踪器系统800未示出基垫820经由粘合剂耦接。然而,使用粘合剂将导航跟踪器810耦接到基垫820在本公开以及无此类单独粘合剂的实施方案的范围内。基垫820可包括趋于附着到组织10的多个非织造纳米纤维822。
62.导航跟踪器810可包括壳体812和延伸到导航跟踪器810的壳体812中的电缆814。设置在壳体812内的可以是多个跟踪器816。在例示的实施方案中,导航跟踪器810包括单个跟踪器816,该单个跟踪器可为导电线圈,诸如金属。图16是跟踪器816的端视图,而非类似于图14的侧视图。跟踪器816经由电缆814的引线815与电缆814电连通。电缆814的第一端部耦接到电源,并且电缆814的第二端部包括向跟踪器816提供电力的引线815。当向跟踪器816(例如,导电线圈)提供电力或电流时,跟踪器816产生电磁场。类似地,跨线圈的电流的测量可用于利用外部电场检测位置。
63.跟踪器系统800可包括将跟踪器816的引线与电缆814的引线815连接的导电通路840。导电通路840可包括横穿基垫820的一部分的路径。同样,在例示的实施方案中,导电通路840在电缆814的引线815处开始,并且然后进入基垫820。导电通路840相对深地延伸到基垫820中,然后再返回到导航跟踪器810中。在进入导航跟踪器810之后,导电通路840连接到跟踪器816的引线。例示的实施方案仅示出单个跟踪器816;然而,导航跟踪器810可包括多个跟踪器816,并且导电通路40将每个跟踪器816的引线与电缆814的引线815连接。导电通
路840可由多种不同材料制成。例如,导电通路可以是导电粘合剂或可生物再吸收的金属诸如镁。
64.电缆814还可用作移除装置以从组织10移除跟踪器系统800。电缆814可位于非对称位置以帮助从基垫820移除导航跟踪器810。如图17所示,电缆814的非对称位置使得执业医生能够在近侧方向上拉动电缆814以从基垫820移除导航跟踪器810。
65.在此移除期间或之后,基垫820的一部分可保持附着到组织10,而基垫820的一部分可保持耦接到导航跟踪器810。如先前所讨论的,如果基垫820的纳米纤维822由可生物吸收的纳米纤维制成,则基垫820的保持附着到润湿组织10的部分将被重新吸收,即使其保持附着到组织10。
66.在图16至图17的示例中,当导航跟踪器810从基垫820移除时,导电通路840的一部分可保留在基垫820的附着到组织10的部分中。如图17所示,导电通路840的第一部分842设置在导航跟踪器810和基垫820的从组织10移除的部分内。导电通路840的第二部分844设置在基垫820的保持附着到组织10的部分内。导电通路840的第三部分846设置在导航跟踪器810和基垫820的从组织10移除的部分内。
67.导电通路840的上述布置可提供若干益处。例如,仅当电缆814的引线815与跟踪器816之间的电路完整时,跟踪器816才可从电缆814接收电力或测量电流。因此,执业医生可跟踪在规程期间电路是否断开。例如,电路可能由于导航跟踪器810与基垫820之间的未对准而断开,或者在导航跟踪器810和基垫820已过早分离的情况下断开。
68.另外,当医疗规程结束时,执业医生可从基垫820移除导航跟踪器810。执业医生将能够确认电路何时断开,因为当导航跟踪器810从基垫820移除时电路将断开。
69.本文所公开的任何方法包括用于执行所述方法的一个或多个步骤或动作。方法步骤和/或动作可以彼此互换。换句话讲,除非需要特定顺序的步骤或动作来正确地操作实施方案,否则可以修改特定步骤和/或动作的顺序和/或使用。此外,本文所述的子程序或方法的仅一部分可以是在本公开的范围内的单独的方法。换句话讲,一些方法可以仅包括在更详细的方法中描述的步骤的一部分。
70.在整个说明书中对“实施方案”或“该实施方案”的引用意味着结合该实施方案描述的特定特征、结构或特性被包括在至少一个实施方案中。因此,在整个说明书中引用的短语或其变型形式不必都指相同的实施方案。
71.类似地,受益于本公开内容的本领域技术人员应当理解,在实施方案的以上描述中,为了简化本公开内容,各种特征有时被组合在单个实施方案、附图或其描述中。然而,不应将本公开内容的方法解释为反映以下意图:任何权利要求需要比该权利要求中明确叙述的特征更多的特征。相反,如以下权利要求所反映的,创造性方面在于任何单个前述公开的实施方案的少于所有特征的组合。因此,在此详细描述之后的权利要求书被明确地并入到此详细描述中,其中每一项权利要求独立地作为单独的实施方案。本公开包括独立权利要求及其从属权利要求的所有排列。
72.权利要求中关于特征或元素的术语“第一”的叙述不一定暗示存在第二或附加的这种特征或元素。对于本领域技术人员显而易见的是,在不脱离本公开的基本原理的情况下,可以对上述实施方案的细节进行改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1