用于图像引导手术的通用工具适配器的制作方法
发明领域本发明总体上涉及手术,并且具体地涉及用于在图像引导手术期间保持工具的工具适配器。
背景技术:
0、发明背景
1、在手术期间,通常需要将手术中使用的工具保持在相对固定的位置。虽然执行手术的外科医生可以持有工具,但是机械地保持工具可以解放外科医生的手以用于其他任务。在图像引导手术期间,通常需要以期望的精度跟踪或确定手术中使用的工具相对于患者解剖结构的位置。然后,基于工具跟踪的位置,可以相对于患者的解剖结构的图像(例如,在患者图像上增强)向外科医生显示工具的图像。
2、通过引用并入本专利申请的文献被认为是本技术的组成部分,其程度为除了任何术语在这些并入的文献中以与本说明书中明确地或隐含地作出的定义相冲突的方式被定义之外,应仅考虑本说明书中的定义。
3、发明概述
4、本发明的实施例提供了一种工具适配器,包含:
5、适配器臂,该适配器臂具有终止于连接件的近端和具有圆形联轴器的远端,该圆形联轴器具有中心并且限定轴线,轴线与圆形联轴器正交并且穿过中心;以及
6、工具夹持器,该工具夹持器旋转地连接到该圆形联轴器,以允许该工具夹持器绕该轴线旋转,该工具夹持器被构造成沿着该轴线固定地保持工具。
7、在公开的实施例中,工具夹持器包括容纳在筒夹保持器(collet holder)中的筒夹,并且筒夹被构造成在受到压缩时夹持工具。筒夹保持器可以由圆形开口件(circularopening)保持,并且可以被构造成不能沿着轴线平移。工具适配器可以包括筒夹紧固头,该筒夹紧固头被构造成拧到筒夹保持器上,以实现对筒夹的压缩。
8、在进一步公开的实施例中,工具适配器包括位置标记物,该位置标记物以与轴线的预设空间关系固定地连接到近端的连接件,该标记物具有光学元件,该光学元件使该标记物能够在空间上被跟踪,使得对该标记物的跟踪提供对由工具夹持器保持的工具的跟踪。
9、在还进一步公开的实施例中,工具适配器包括扭矩限制装置,该扭矩限制装置联接到工具夹持器,并且被构造成向夹持器施加预设阈值扭矩,使得当超过阈值扭矩时允许工具夹持器的旋转。扭矩限制装置可以包含多个销,该多个销保持在工具夹持器内并且被构造成抵靠圆形开口件施加力。
10、在另外公开的实施例中,工具适配器包括总指示偏差(tir)控制器,该总指示偏差控制器联接到工具夹持器并且被构造成将预定的tir施加到工具。
11、根据本发明的实施例,还提供了一种用于进行图像引导手术的方法,包含:
12、提供适配器臂,该适配器臂具有终止于连接件的近端和具有圆形联轴器的远端,该圆形联轴器具有中心并且限定轴线,轴线与圆形联轴器正交并且穿过中心;
13、将工具夹持器旋转地连接到该圆形联轴器,以允许该工具夹持器绕该轴线旋转,该工具夹持器被构造成沿着该轴线固定地保持工具;
14、以与轴线的预设空间关系将位置标记物固定地连接到该适配器臂的近端的连接件,该位置标记物包括光学元件,该光学元件使该标记物能够在空间上被跟踪,使得对该位置标记物的跟踪提供对固定到该工具夹持器的工具的跟踪;以及
15、向执行该手术的专业人员呈现被跟踪工具的图像。
16、根据本发明的实施例,还提供了一种方法,该方法包含:
17、将位置标记物固定地连接到适配器臂的近端的连接件,该适配器臂还具有包括圆形联轴器的远端,该圆形联轴器具有中心并且限定轴线,轴线与该圆形联轴器正交并且穿过中心,其中该连接件与该轴线处于预设的空间关系;
18、将工具穿过该适配器臂的工具夹持器插入,其中该工具夹持器包括筒夹并且旋转地连接到该圆形联轴器,以允许该工具夹持器围绕该轴线旋转,该工具夹持器被构造成沿着该轴线固定地保持该工具;以及
19、压缩该筒夹,其中该筒夹被构造成在受到压缩时夹持该工具。
20、在公开的实施例中,该方法包括将工具的终端定位在预定位置上以允许对工具进行校准。该方法还可以包括将工具插入到患者中,同时跟踪标记物和工具。
21、在进一步公开的实施例中,对筒夹的压缩包括旋转筒夹紧固头。
22、在还进一步公开的实施例中,位置标记物包括光学元件,该光学元件使标记物能够在空间上被跟踪,使得对位置标记物的跟踪提供对固定到适配器臂的工具的跟踪。
23、根据结合附图进行的本公开的实施例的以下详细描述,本公开将被更完全地理解,在附图中:
技术实现思路
0、概述
1、在使用增强现实系统执行的医疗程序期间,通常需要跟踪该程序中使用的工具(例如,用于椎弓根螺钉的螺丝刀),以便使用该系统呈现给医疗专业人员的图像正确地与该工具和经历该程序的患者配准。为了跟踪工具,通常将标记物连接到工具,并且由系统跟踪标记物。然而,在诸如螺丝刀的工具需要一次或更多次旋转,或者甚至部分旋转的情况下,标记物必须停留在跟踪系统的视野内,以便维持跟踪。此外,为了消除跟踪误差,总指示偏差应该被最小化。此外,无论使用旋转工具还是固定工具(即,在使用过程中通常不旋转的工具,例如,探针、指针或导向器),都希望通过适配器施加牢固的夹紧力,将工具相对于标记物保持在适当的位置。
2、本发明的实施例提供了一种解决方案,该解决方案通过将具有标记物的工具适配器附接到工具,并将工具适配器构造成能够围绕工具旋转而不改变工具与标记物的空间关系来克服这两个问题。
3、工具适配器包括适配器臂,该适配器臂在近端终止于连接到该标记物的连接件中,并且在远端终止于圆形开口件中。工具夹持器旋转地连接到圆形开口件,以便允许工具夹持器绕由开口件限定的轴线旋转,工具夹持器被构造成沿着轴线固定地保持工具。
4、工具夹持器通常包括容纳在筒夹保持器中的筒夹,并且筒夹被构造成当筒夹被压缩时夹持工具。使用筒夹牢固地并且稳定地将工具保持在中心位置中。筒夹保持器保持在圆形开口件中,并且筒夹、筒夹保持器和圆形开口件的组合意味着工具的轴在旋转期间沿着开口件的轴线精确地保持,并且在所有旋转期间具有非常低的总指示偏差(tir)。本发明人已经发现,与具有100微米数量级的tir的现有技术系统相比,本发明的实施例具有10微米数量级的tir,并且因此显著地提高了对被夹持的工具的跟踪的精度。
5、系统描述
6、在下文中,所有方向性参照(例如,上、下、向上、向下、左、右、顶、底、之上、之下、竖直和水平)仅用于识别目的,以帮助读者理解本发明,并且不产生限制,特别是不产生对于本发明的实施例的定位、取向或使用的限制。
7、现在参考图1,图1示意性地示出了根据本发明的实施例的工具适配器18在增强现实系统20中的使用。作为示例并且为了简单起见,在下面的描述中,设想系统20由医疗专业人员22在医疗程序中使用,其中使用扳手180将适配器18附接到圆柱形工具16(例如,螺丝刀),如下文更详细地解释的。尽管这里的描述设想了医疗程序,但是应当理解,本发明的实施例可以用于非医疗情况。
8、系统20由医疗专业人员22操作,举例来说,该医疗专业人员佩戴增强现实组件24(该组件跟踪工具适配器18),这将在下面参考图2a进行更详细的描述。应当理解,组件24只是能够跟踪工具保持器的一种类型的跟踪系统,并且本发明的范围包括能够跟踪工具适配器18和/或安装在工具适配器上的位置标记物14的任何跟踪系统。
9、组件24尤其包括图像捕获装置72,在此也称为相机72,相机具有由视线74指示的视场并且被构造成捕获可见光谱和/或非可见光谱(例如,红外(ir)光谱)中的图像。下面描述组件24以及系统20、处理器26和装置72的功能。benishti等人的美国专利9,928,629中描述了类似于增强现实组件24的组件及其操作,该美国专利的公开内容通过引用并入本文。
10、虽然组件24可以被结合佩戴到专业人员22身上的多个不同的保持结构中,但是在本图中,保持结构被设想为类似于一副眼镜。增强现实领域的普通技术人员应意识到其他可能的结构,例如,将增强现实组件结合到平视显示器中,该平视显示器集成到由系统20的用户佩戴的头戴式视图器(headset)中,并且所有这些结构都被设想为包括在本发明的范围内。下面参考图2b描述另一示例性平视显示器。
11、系统20包括处理器26并处于处理器26的总体控制之下。在一个实施例中,设想处理器26被结合在独立计算机28内,并且处理器通常与系统的其他元件(包括组件24)无线通信,如图1所示。可替代地或附加地,处理器26可以使用光缆和/或传导电缆进行通信。在另外的替代实施例中,处理器26集成在组件24内,或者集成在组件的安装座(mounting)中。处理器26通常能够访问数据库40(其中存储有由系统20使用的图像和其他可视元素)。例如,使处理器26能够操作系统20的软件可以通过网络以电子形式下载到处理器。可替代地或附加地,软件可以在非暂时性有形介质(例如,光学、磁性或电子存储介质)上提供。
12、这里举例说明的医疗程序是在患者30上进行的,并且在该程序期间,位置标记物14被结合到工具适配器18中。如下所述,标记物14可以被处理器26跟踪,使得处理器还能够跟踪标记物附接到的工具适配器以及由适配器保持的工具16。
13、图2a是示出根据本发明的实施例的组件24的示意图。如上所述,作为示例,组件24被构造成为安装在框架54上的一副眼镜50。
14、至少一个图像捕获装置68和/或72附接到框架54。典型地,装置68和/或72包括相机,该相机被构造成捕获由专业人员的眼睛看到的场景的图像(包括在可见光谱和/或非可见光谱中的标记物14的图像)。
15、如上所述,组件24包括相机72,该相机被构造成捕获组件24前面的场景的元素(包括标记物14)的图像。该图像由投射仪73投射出的射线产生,该射线在相机72检测到的光谱中。投射仪73位于相机72附近,使得来自投射仪的已经被反射回的射线被相机72捕获。该相机典型地具有被构造成阻挡其他射线(例如,由手术灯投射出的射线)的带通滤波器。典型地,相机72和投射仪73在光谱的非可见区域中(例如,在近红外光谱中)操作。如下所述,典型地,从标记物14接收至少一些反射的射线,并且处理器26使用由相机72从接收的射线产生的标记物的图像来跟踪标记物,并因此跟踪工具16和适配器的定位和取向。
16、图2b是示出根据本发明实施例的平视显示器(hud)700的示意图。hud 700由专业人员22佩戴,并且可以代替组件24(图1)使用。hud 700包括光学外壳704,该光学外壳结合有红外相机708。外壳704还包括红外透明窗口712,并且在外壳内(即,在窗口后面),安装有一个或更多个红外投射仪716。一对增强现实显示器720安装在外壳704上,这对增强现实显示器允许专业人员22通过显示器查看实体(例如,患者30的一部分或全部)并且还被构造成向专业人员呈现可以从数据库40接收的图像或任何其他信息。
17、hud包括安装在处理器外壳726中的处理器724,该处理器操作hud的元件。处理器724通常经由天线728与处理器26通信,尽管在一些实施例中,处理器724可以执行由处理器26执行的一些功能,并且在其他实施例中,处理器724可以完全取代处理器26。
18、电筒(flashlight)732安装在hud 700前面。电筒将可见光谱光投射到物体上,使得专业人员22能够通过显示器720清楚地看到物体。平视显示器的元件通常由电池(图中未示出)供电,电池经由电池电缆输入件736向元件供电。
19、hud 700通过头带740保持在专业人员22的头部上的适当位置,并且专业人员可以通过调节旋钮744调节头带。
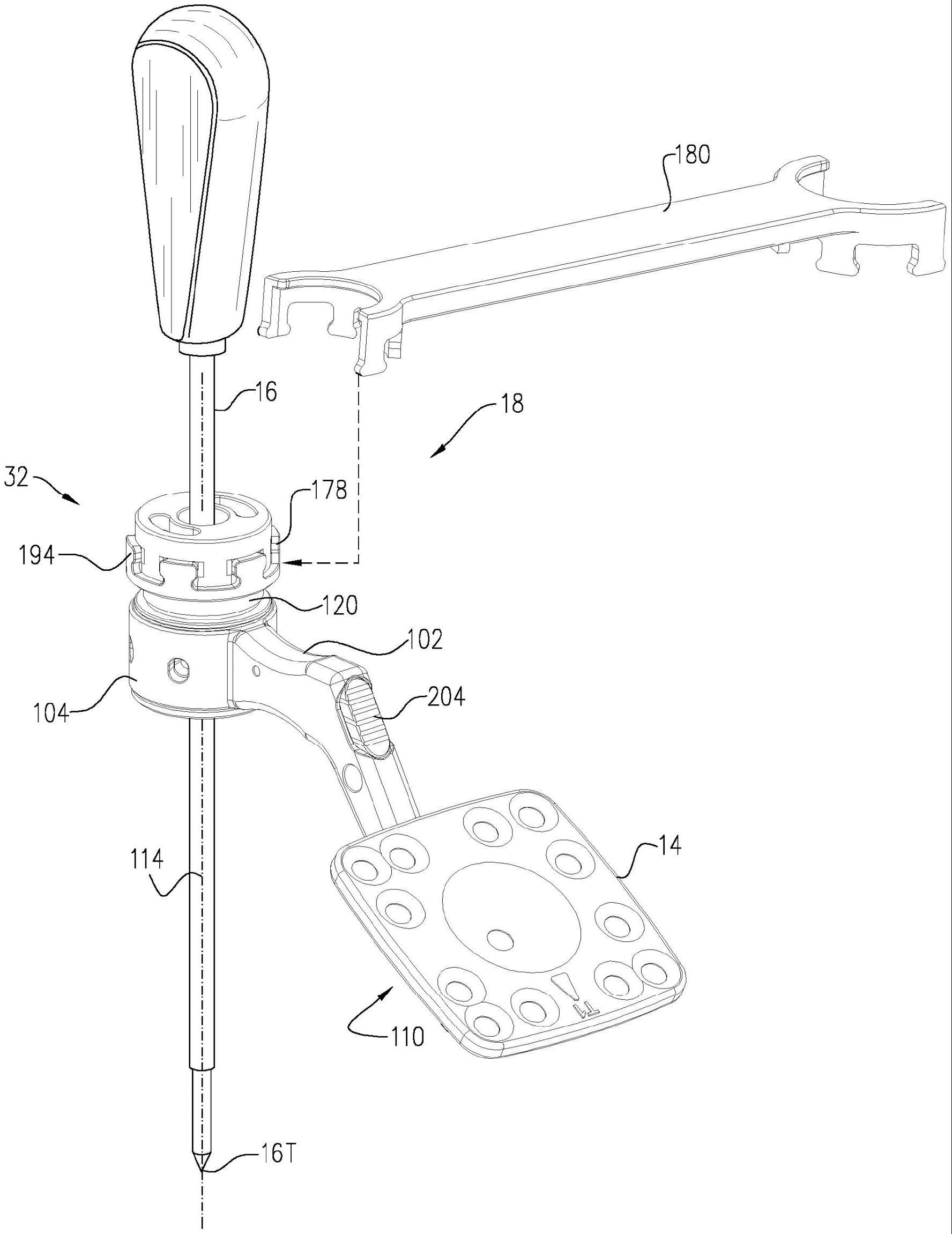
20、根据本发明的实施例,图3是示出示例性工具适配器18和工具16的示意图,图4是工具适配器和工具的示意性分解图,并且图5是工具适配器和工具的示意性横截面。工具适配器18由适配器臂102形成,适配器臂102在臂的上端或远端处终止于圆形联轴器104(本文也称为圆形开口件104),并且在臂的下端或近端处终止于连接件110,连接件110将臂固定地连接到标记物14。在messinger等人的美国专利申请16/199,281中描述了类似于标记物14的标记物,该专利申请通过引用并入本文。
21、在公开的实施例中,臂102形成为单个单元。然而,在其他实施例中,臂102可以形成为固定地连接在一起的两个或更多个单元。例如,开口件104可以形成为与臂102的剩余部分分开的单元,并且开口件可以通过任何方便的方式固定地连接到臂的剩余部分。
22、如下面更详细描述的,工具夹持器32固定地保持工具16,并且工具夹持器旋转地连接到圆形开口件104,使得工具16随着夹持器的旋转而相对于开口件旋转。
23、圆形开口件104包括内部圆柱形表面106,该内部圆柱形表面的直径通常在10mm-50mm的范围内,并且该表面限定开口件的对称轴线114。工具夹持器32包括刚性筒夹保持器120,该筒夹保持器具有外部圆柱形表面112,该外部圆柱形表面的直径略小于内部圆柱形表面106的直径,该筒夹保持器120装配到开口件104中。除了如下所述,筒夹保持器120能够在开口件104内自由旋转。
24、在将筒夹保持器120组装到开口件104中之后,保持器被上圆形垫圈130和下锁紧螺母132保持,使得筒夹保持器不能沿轴线114平移。由于锁紧螺母132的几何形状和形成锁紧螺母的材料,锁紧螺母132起到垫圈的作用。垫圈和螺母通常由诸如peek的低摩擦材料形成,并用作摩擦轴承,防止保持器沿轴线114平移,同时允许保持器绕轴线旋转。上垫圈130在固定地形成在表面112上的圆形突出脊136与开口件104的上边缘140之间被保持就位。
25、下锁紧螺母132是带螺纹的,并且被构造成与保持器120的带螺纹的下区域144配合,并且被设定尺寸成与开口件104的下边缘148配合。下锁紧螺母通过螺母与区域144之间的粘合剂以及通过拧入区域144的固定螺钉152来保持在区域144中的适当位置。除了用于将锁紧螺母保持在适当位置的固定螺钉152之外的系统(例如,定位销),对于本领域的普通技术人员来说是熟悉的,并且所有这样的系统都被设想为包括在本发明的范围内。
26、如下所述,在一些实施例中,锁紧螺母可以用于以受控方式限制臂102围绕筒夹保持器120的旋转自由度。
27、筒夹150装配在筒夹保持器120内。筒夹150具有圆柱形的上外部部分154和圆锥形的下外部部分158。筒夹150还具有中心圆柱形孔162,该孔被设定尺寸成当筒夹未被压缩时接受工具16,并且当筒夹被压缩时夹持工具。本发明的实施例包括一组筒夹,该组的每个筒夹能够接受具有一定直径范围的工具。
28、筒夹保持器120具有内部上圆柱形表面166和下内部圆锥形表面170,这两个内表面被设定尺寸成与筒夹150的外表面相配合(图5)。
29、筒夹150通过保持弹簧174保持在筒夹保持器内的适当位置,保持弹簧抵靠在上圆柱形表面166中的专用凹槽上。筒夹紧固头178被构造成拧到筒夹保持器120的螺纹外表面182上。紧固头178的内部被构造成与弹簧174配合,使得当该头被拧在表面182上以朝向筒夹保持器移动时,紧固头推动弹簧174并因此推动和压缩筒夹150。
30、内部圆柱形管190固定到筒夹紧固头178的上表面,该管的内径大于圆柱形工具16的外径。紧固头178的外表面被构造成能够被扳手180夹紧,使得扳手能够转动紧固头。举例来说,在一个实施例中,外表面具有突起194,并且扳手180与突起配合,使得扳手能够旋转紧固头。
31、一旦工具16被定位在适配器18内,使得工具穿过管190,筒夹紧固头178的旋转推动筒夹150的平坦边缘,使得筒夹被压缩,从而夹紧工具16。应当理解,当工具被筒夹夹持时,适配器臂102能够围绕工具旋转。
32、通过对以上描述的回顾,应当理解,工具夹持器32包括筒夹保持器120和这里描述的除了臂102和工具16之外连接到筒夹保持器和筒夹150的其他元件。
33、在一些实施例中,臂102包括锁定机构200。机构200包括操作按钮204,该操作按钮被构造成经由弹簧和连杆拨动(toggle)机构的销208,以与筒夹保持器表面112中的孔212之一配合或脱离。当扳手180旋转紧固头178时,通过防止筒夹保持器120围绕工具的中心轴线自由旋转,锁定机构的使用有助于将工具16附接到工具适配器18。
34、在一些实施例中,圆形开口件104具有与孔212对准的孔。开口件104中的孔可以由专业人员22用于将机构200与孔212对准,并且还可以在清洁适配器18时促进液体的冲洗和避免残留液体。
35、如上所述,标记物14固定地附接到下连接件110。在所示实施例中,标记物14包括形成在标记物14上的光学元件12。元件12可以形成为上标记物部分15中的多个孔21,这些孔的背后是反射片(retroreflective sheet)17,反射片17通过固定到上标记物部分的下标记物部分23相对于孔保持就位。标记物14通过螺钉19固定地连接到下连接件110。
36、元件12通常被构造成没有旋转或反射对称轴线,使得处理器26能够使用标记物14的图像(包括由组件24的图像捕获装置68和/或相机72获取的元件12的图像)来跟踪标记物,即,确定标记物在由组件限定的参照系中的位置和取向。
37、在一些实施例中,通常在生产适配器18时,锁紧螺母132可以用于以受控方式限制臂102围绕筒夹保持器120的旋转自由度。在这种情况下,锁紧螺母充当扭矩限制装置。(在对臂旋转没有限制的情况下,在程序期间,专业人员22可能无意中导致臂旋转。虽然如本文所述,臂的无意旋转不会影响系统20的功能,但是这种旋转可能是不希望的。)
38、在臂旋转没有限制的情况下,应当理解,一旦工具16已经被筒夹150夹紧到筒夹保持器120上,并且工具保持水平,臂102的重量(即,由于重力作用在臂上的力)将使臂绕轴线114旋转到竖直的“6点钟”位置。如上所述,锁紧螺母132可以被调节以抵消重力,使得当工具16保持水平时,臂102不旋转而是在“3点钟”位置也是水平的。锁紧螺母的作用是为重力产生的扭矩提供抵消扭矩。抵消扭矩(这里也称为阈值扭矩)并不完全防止臂102的旋转,而是减少臂的无意旋转,因为旋转仅在超过阈值扭矩时发生。
39、应当理解,由锁紧螺母132提供的阈值扭矩防止适配器18由于重力而旋转,但是不会施加太大的摩擦力,该摩擦力会阻止专业人员22顺畅地旋转工具16。对于臂和标记物(标记物质量为80g并且质心距轴线114为100mm),施加到臂192的阈值扭矩约为8n·cm。
40、除了用作扭矩限制装置之外,锁紧螺母132还用作由适配器18夹紧的工具的总指示偏差(tir)量的控制器。如果锁紧螺母132被设定为具有8n·cm的阈值扭矩,则tir约为60微米或更小。
41、图6是示出根据本发明的另一实施例的示例性工具适配器418和工具16的示意图。除了下面描述的差异之外,适配器418的操作大致类似于适配器18的操作(图1-图5),并且在适配器18和适配器418两者中由相同附图标记指示的元件在构造和操作上大致类似。
42、与适配器18相比,在适配器418中,在筒夹保持器120中形成三个基本相似的盲孔420。盲孔420围绕轴线114对称地分布,并且与轴线正交。
43、三个基本相似的弹簧428插入孔420中,并且三个基本相似的销424插入弹簧中。每个销424具有终端肩部432,终端肩部432具有与其孔420的直径相配合的外径。
44、此外,弹簧和销被设定尺寸成使得在插入之后,每个弹簧下端接触其盲孔的基部,弹簧上端接触肩部432,并且肩部的暴露表面436从表面112稍微突出,如图6所示。
45、在组装适配器418之后,每个表面436用作为弹簧428参数(即,弹簧的弹簧常数及其变化的长度)的函数的力抵靠开口件104的内表面106推压。当开口件围绕轴线114旋转或试图围绕轴线114旋转时,推力又在开口件104上产生摩擦力,并且摩擦力提供上述阈值扭矩。
46、应当理解,通过选择具有适当参数的弹簧,以及通过选择形成销424和开口件104的材料,可以将阈值扭矩设置为上述8n·cm的值,或者设置为高于或低于该值的值。因此,可以通过这些选择来实现任何期望的阈值扭矩,而无需过度的实验。
47、为了组装工具夹持器32,首先将弹簧428和销424定位在它们的盲孔中。然后,保持器臂的开口件104滑过筒夹保持器120和销肩部432。最后,将锁紧螺母132拧到保持器120上。
48、与适配器18(其中如上所述,锁紧螺母132用于设置tir和阈值扭矩的值)相比,在适配器418中,这两个参数可以独立地设置。即,在适配器418中,锁紧螺母132用于设定tir的值,并且弹簧428和销424用于设定阈值扭矩的值。
49、上面的描述设想有三组弹簧428和销424围绕轴线114对称分布。然而,应当理解,围绕轴线对称分布的任何其他方便的多个弹簧和销(例如,两个、四个或五个弹簧和销)可以用作扭矩限制装置。
50、图7是根据本发明的实施例的在增强现实系统20(图1)中使用所公开的工具适配器(例如,工具适配器18或工具适配器418)时执行的步骤的流程图。这些步骤可以由适配器的用户(例如,专业人员22)来执行。
51、在初始步骤300中,将标记物(诸如标记物14)附接到工具适配器。例如,标记物14可以附接到工具适配器的臂102的连接件110。作为另一示例,如上文参考图3、图4、图5和图6所述,组装工具适配器418。如上所述,这种组装通常包括调节锁紧螺母132以提供预定的tir,以及定位销424和弹簧428。在一些实施例中,不需要初始步骤300,因为标记物可能已经附接到或结合在工具适配器中。
52、在工具插入步骤304中,圆柱形工具(例如,工具16)被插入穿过适配器的筒夹(例如,筒夹150)的孔(例如,孔162)。由于该工具将在上述医疗程序中用于患者(例如,患者30),因此插入该工具,使得该工具16的末端(例如,末端16t)低于标记物的水平。
53、在筒夹致动步骤308中,筒夹被压缩。压缩使筒夹夹持工具。例如,扳手180用于旋转筒夹紧固头178以压缩筒夹150,该压缩导致筒夹夹持工具16。当使用扳手180时,锁定机构200应该被致动以将筒夹保持器120锁定在适当的位置,如上所述,以便于筒夹150的压缩。
54、步骤300-308提供了一种用于组装工具和工具适配器和/或使工具准备好与图像引导系统的框架一起使用或在图像引导系统的框架中使用以及在医疗程序中使用的方法。下面的步骤310涉及经由图像引导系统执行的校准步骤,并且步骤316涉及在医疗程序或手术期间使用适配器来跟踪工具。
55、如上所述,处理器26能够跟踪或访问或接收关于标记物14的跟踪信息。因此,在校准步骤310中,专业人员22将工具终端16t定位在预定位置,并且处理器26获取或访问(例如,经由相机68和/或73)标记物14的图像。根据获取的图像,处理器计算标记物的位置(即,标记物的位置和取向),并形成标记物位置与工具终端16t和工具16的取向之间的矢量对应。即,处理器将标记物位置变换到工具终端16t和轴线114的方向。应当理解,因为标记物固定到臂上,如果臂102围绕轴线114旋转,则矢量对应不变。
56、在工具插入步骤316中,工具(例如,工具16)被插入到患者(例如,患者30)中,同时标记物(例如,标记物14)被跟踪(例如,通过相机68和/或73以及处理器26)。对标记物的跟踪向处理器提供标记物的位置和取向(即,标记物位置)。根据标记物位置,处理器能够使用在步骤310中或在步骤310之后找到的矢量对应来找到工具终端的位置和工具的取向。处理器能够使用工具的取向和工具终端(或末端)的位置来在近眼组件或头戴式组件(如组件24)中呈现正确配准的图像。
57、在一个实施例中,工具16包括螺丝刀,该螺丝刀插入到患者30中,使得专业人员22能够调节椎弓根螺钉。应当理解,当螺丝刀被转动时,只要标记物14被跟踪,处理器26仍然能够使用在校准步骤310中找到的矢量对应来跟踪螺丝刀取向及其终端。
58、可替代地或附加地,在该程序期间,定位标记物14可能阻碍专业人员对患者的观察,和/或由装置68和/或相机72获取的对患者的观察。在这些事件中的任何一个中,并且根据一些实施例,专业人员22可以围绕轴线114旋转臂102,施加大于在步骤300中施加的阈值扭矩的扭矩,使得标记物14不再阻碍视野,而同时连续地跟踪标记物。由于标记物14继续被跟踪,所以处理器能够使用标记物的新跟踪位置来继续跟踪工具16和工具的终端16t,这是因为工具与标记物之间以及工具终端与标记物之间的空间关系(即,矢量对应)不因工具适配器绕轴线114的旋转而改变。
59、本领域普通技术人员将会理解,上述步骤300-316的顺序仅仅是这些步骤的可能顺序的一个示例,并且这些步骤可以以与这里给出的顺序不同的顺序来执行。例如,初始步骤300可以在筒夹致动步骤308之后执行。所有这些顺序都被认为包含在本发明的范围内。
60、虽然上面的描述已经使用了在这里描述的工具适配器中可以绕其轴线旋转的工具(例如,螺丝刀)作为示例,但是应当理解,适配器中使用的工具不需要旋转。因此,适配器中使用的工具可以是固定的或是围绕工具轴线不可旋转的。
61、因此,应认识到,以上描述的实施例是通过示例的方式引用的,并且本发明不限于上文已具体示出和描述的那些实施例。更确切地,本发明的范围包括在上文中所述的各种特征的组合和子组合,以及本领域中的技术人员在阅读了前述描述时将想到的且在现有技术中未公开的其变形和修改。
- 还没有人留言评论。精彩留言会获得点赞!