对姿势有反应的神经刺激的制作方法
本发明涉及控制对刺激的神经反应,并且具体地涉及通过使用植入在神经通路附近的一个或多个电极来测量复合动作电位。这可能是为了改善反馈以控制后续施加的刺激,和/或评估姿势改变的影响。发明背景有许多情况需要施加神经刺激以产生诱发复合动作电位(ecap)和/或改变神经功能。例如,使用神经调节来治疗各种疾病,包括慢性神经性疼痛、帕金森病和偏头痛。神经调节系统向神经组织施加电脉冲以便产生治疗效果。当用于缓解源自躯干和四肢的神经性疼痛时,电脉冲被施加到脊髓的背柱(dc),称为脊髓刺激(scs)。这种系统通常包括植入式电脉冲发生器以及如电池等可以通过经皮感应传输进行再充电的电源。电极阵列连接到脉冲发生器,并且定位在(多个)靶神经通路附近。由电极施加到神经通路的电脉冲引起神经元的去极化,并且产生传播动作电位。以这种方式受到刺激的纤维抑制了疼痛从脊髓的那一段传递到大脑。为了维持疼痛缓解效果,基本上连续地(例如以30hz至100hz范围内的频率)施加刺激。为了有效且舒适地操作,必须将刺激幅度或递送电荷维持在募集阈值以上。低于募集阈值的刺激将无法募集任何动作电位。还必须施加低于舒适阈值的刺激,高于该舒适阈值时,由于aβ纤维的募集增加而产生不舒适或疼痛的感觉,当募集太大时,会产生不舒适的感觉,并且在高刺激水平下,甚至可以募集与剧烈疼痛、冷觉和压觉相关的感觉神经纤维。在几乎所有的神经调节应用中,需要单一类别的纤维反应,但是所采用的刺激波形可能在其他类别的纤维上募集动作电位,这导致不希望的副作用。电极迁移和/或植入物接受者的姿势改变使维持适当的神经募集的任务变得更加困难,电极迁移和姿势改变中的任何一种都可能显著改变由给定刺激引起的神经募集,这取决于刺激是在电极位置或用户姿势改变之前还是之后施加的。在硬膜外腔中存在供电极阵列移动的空间,并且这种阵列移动改变了电极到纤维的距离,并且因此改变了给定刺激的募集效果。此外,脊髓本身可以在脑脊液(csf)中相对于硬脑膜移动。在姿势改变期间,csf的量和脊髓与电极之间的距离可以显著改变。这种影响是如此之大,以至于仅姿势的改变就能导致先前舒适且有效的刺激方案变得无效或痛苦。所有类型的神经调节系统面临的另一个控制问题是以治疗效果所需的足够水平实现神经募集,但要将能量消耗降到最小。刺激范式的功耗对电池要求有直接影响,这进而影响设备的物理尺寸和寿命。对于可再充电系统,增加的功耗导致更频繁的充电,并且假定电池仅允许有限次数的充电循环,最终这将减少设备的植入寿命。已经尝试通过反馈的方式解决这些问题,如通过本技术人在国际专利公开号wo2012/155188中阐述的方法。反馈试图通过控制递送的刺激来补偿神经和/或电极移动以维持恒定的ecap幅度。功能性反馈回路还可以为实时操作和/或后分析产生有用的数据,如观察到的神经反应幅度和施加的刺激电流,然而,设备在数小时或数天的过程中以数十hz的频率运行很快就会产生大量的这种数据,这远远超过植入设备的数据存储和/或数据传输能力。关于本说明书中已包括的文件、行为、材料、设备、物品等的任何讨论仅仅是出于为本发明提供上下文的目的。不应因为这些事项在本技术的每项权利要求的优先权日之前存在而认为是承认这些事项中的任何或所有事项形成现有技术基础的一部分或为与本发明相关领域内的公共常识。在整个本说明书中,词语“包括(comprise)”或变形(如“包括(comprises)”或“包括(comprising)”)将被理解为意指包括所陈述的要素、整体或步骤,或者一组要素、整体或步骤,但不排除任何其他要素、整体或步骤,或者任何其他的一组要素、整体或步骤。在本说明书中,元素可以是选项列表中的“至少一个”的陈述应被理解为该元素可以是所列选项中的任何一个,或者可以是所列选项中的两个或更多个的任何组合。
背景技术:
技术实现思路
1、根据第一方面,本发明提供了一种用于可控地施加神经刺激的可植入设备,该设备包括:
2、多个电极,该多个电极包括一个或多个刺激电极和一个或多个感测电极;
3、刺激源,该刺激源用于提供要从该一个或多个刺激电极递送到患者的神经通路的刺激以在该神经通路上产生诱发动作电位;
4、测量电路系统,该测量电路系统用于记录在该一个或多个感测电极处感测到的神经复合动作电位信号;以及
5、控制单元,该控制单元被配置成:
6、控制对如由刺激参数定义的神经刺激的施加;
7、经由该测量电路系统测量由该刺激诱发的神经复合动作电位反应的特性;
8、使用该刺激参数和该测得的诱发神经复合动作电位反应的特性,计算在该患者处于参考姿势时将从该神经刺激获得的诱发反应的特性;以及
9、从该计算的特性估计该患者的姿势。
10、根据第二方面,本发明提供了一种控制神经刺激的自动化方法,该方法包括:
11、向患者的神经通路施加该神经刺激以在该神经通路上产生诱发动作电位,该刺激由刺激参数定义;
12、测量由该刺激诱发的神经复合动作电位反应的特性;
13、使用该刺激参数和该测得的诱发神经复合动作电位反应的特性,计算在该患者处于参考姿势时将从该神经刺激获得的诱发反应的特性;以及
14、从该计算的特性估计该患者的姿势。
15、根据第三方面,本发明提供了一种用于可控地施加神经刺激的可植入设备,该设备包括:
16、多个电极,该多个电极包括一个或多个刺激电极和一个或多个感测电极;
17、刺激源,该刺激源用于提供要从该一个或多个刺激电极递送到患者的神经通路的刺激以在该神经通路上产生诱发动作电位;
18、测量电路系统,该测量电路系统用于记录在该一个或多个感测电极处感测到的神经复合动作电位信号;以及
19、控制单元,该控制单元被配置成:
20、控制对如由刺激参数定义的神经刺激的施加;
21、经由该测量电路系统测量由该刺激诱发的神经复合动作电位反应的特性;
22、使用该刺激参数和该测得的诱发神经复合动作电位反应的特性,计算在该患者处于参考姿势时将从该神经刺激获得的诱发反应的特性;以及
23、实施完成反馈回路的反馈控制器,该反馈控制器使用该计算的特性作为反馈变量来控制该刺激参数以将该反馈变量维持在设定值。
24、根据第四方面,本发明提供了一种控制神经刺激的自动化方法,该方法包括:
25、向患者的神经通路施加该神经刺激以在该神经通路上产生诱发动作电位,该刺激由刺激参数定义;
26、测量由该刺激诱发的神经复合动作电位反应的特性,
27、根据该测得的诱发神经复合动作电位反应的特性和该刺激参数,计算在该患者处于参考姿势时将从该神经刺激获得的诱发反应的特性;以及
28、通过使用该计算的特性作为反馈变量来控制该刺激参数以将该反馈变量维持在设定值,来完成反馈回路。
29、在本发明的一些实施例中,该姿势的估计包括该神经复合动作电位反应的测量幅度与该计算的特性的比率,该计算的特性包括在该患者处于该参考姿势时将从该神经刺激获得的诱发反应的幅度。
30、本发明的一些实施例使用该计算的特性作为反馈变量来实施完成反馈回路的反馈控制器,该反馈控制器被配置成控制该刺激参数以将该反馈变量维持在设定值。
31、本发明的一些实施例使用该测得的特性作为反馈变量来实施完成反馈回路的反馈控制器,该反馈控制器被配置成控制该刺激参数以将该反馈变量维持在设定值。
32、在本发明的一些实施例中,该控制单元进一步被配置成根据该姿势估计来确定不同姿势下的募集变化。
33、在本发明的一些实施例中,计算该特性包括对于求解其中,是该计算的特性并且包括所计算的幅度c=ikv,i是该刺激参数,v是该测得的诱发神经复合动作电位反应的特性,并且m0和t0是该患者在该参考姿势下的生长曲线的参数。
34、在本发明的一些实施例中,该反馈控制器被配置成使用该姿势的估计来控制该刺激参数。
35、在本发明的一些实施例中,该反馈控制器被配置成使用该姿势的估计来估计该电极与该神经通路之间的距离。
36、在本发明的一些实施例中,该反馈控制器被配置成通过按该参考姿势下这些电极与该神经通路之间的距离缩放该姿势的估计来估计该距离。
37、在一些实施例中,反馈变量是观察到的ecap的幅度度量(v),并且患者姿势的估计包括幅度度量的倒数(v-1),或者其任何合适的函数。
38、在一些实施例中,反馈变量是观察到的ecap的幅度度量(v),并且患者姿势的估计包括参考姿势下的等效ecap幅度与幅度度量的比率(比率),或者其任何合适的函数。在一些实施例中,刺激参数是刺激电流i,并且通过求解来确定估计的募集
39、在一些实施例中,随着时间的推移根据刺激参数值来编译第一直方图。在这样的实施例中,患者姿势的估计可以包括或源自直方图中峰值的位置。在一些实施例中,随着时间的推移根据反馈变量值来编译第二直方图。在这样的实施例中,患者姿势的估计可以包括或源自第二直方图中峰值的位置。
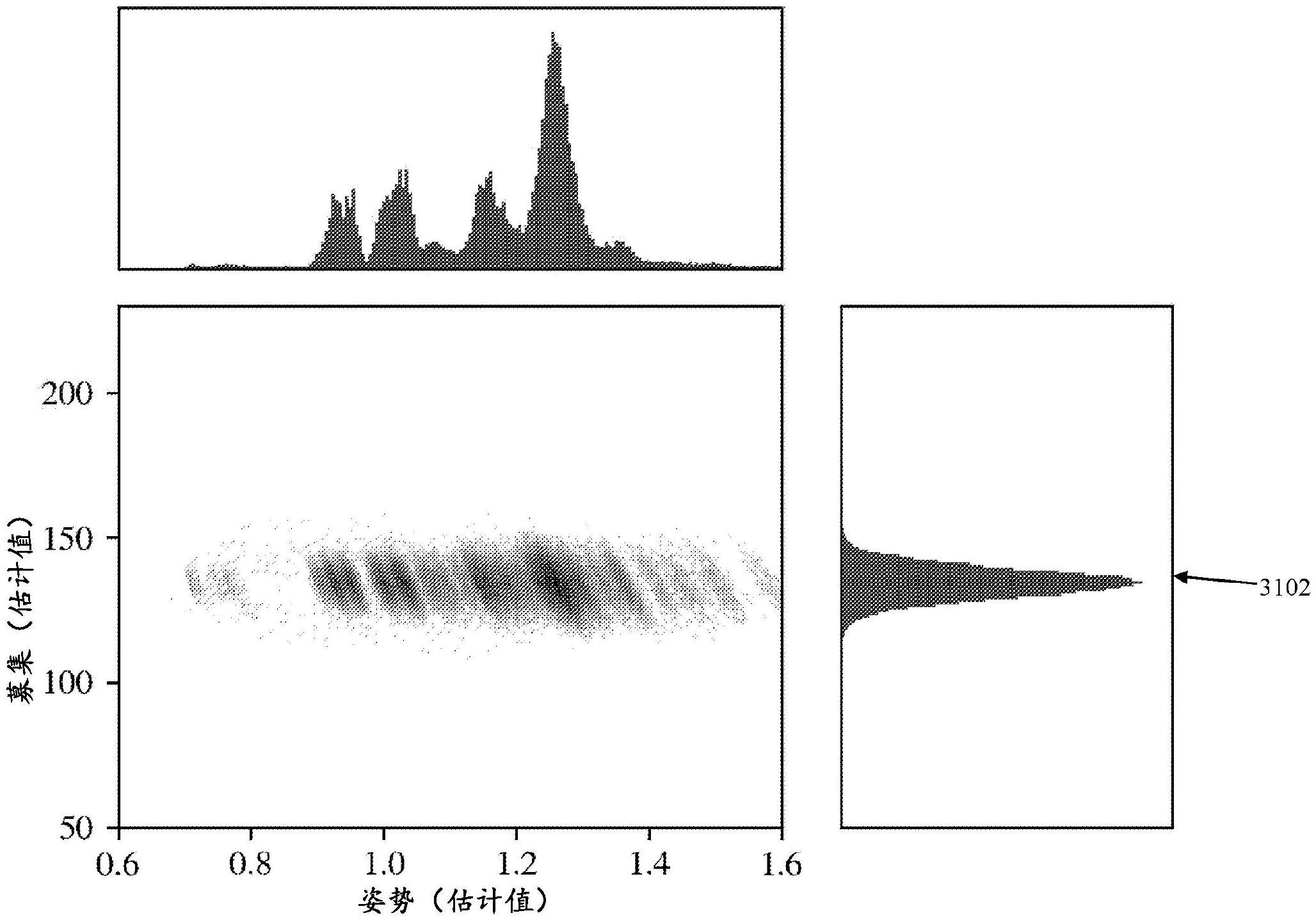
40、在一些实施例中,根据数据对来编译二维直方图,每个数据对包括刺激参数和相应的反馈变量。在这样的实施例中,患者姿势的估计可以包括或源自二维直方图中峰值的位置。
41、另外地或可替代地,在这样的实施例中,患者姿势的估计可以包括或源自观察到的单变量或多变量直方图数据与预先识别的姿势特征直方图的相关性。另外地或可替代地,可以通过将单变量或多变量直方图的子区域与姿势相关联并且当数据在子区域中聚集时确定患者处于该姿势,来得到患者姿势的估计。
42、在一些实施例中,患者姿势的估计可以用于控制至少一个刺激参数。
43、在一些实施例中,患者姿势的估计可以用于确定在使用恒定电压反馈时患者在不同姿势下将经历多少募集变化。在这样的实施例中,募集的高变化的指示可以用于触发i-v反馈回路控制的激活。
44、在一些实施例中,患者姿势的估计可以用作神经电极距离的相对度量。例如,神经电极距离的相对度量可以被计算为姿势的反函数。
45、根据第五方面,本发明提供了一种用于可控地施加神经刺激的可植入设备,该设备包括:
46、多个电极,该多个电极包括一个或多个标称刺激电极和一个或多个标称感测电极;
47、刺激源,该刺激源用于提供要从该一个或多个刺激电极递送到神经通路的刺激以在该神经通路上产生诱发动作电位;
48、测量电路系统,该测量电路系统用于记录在该一个或多个感测电极处感测到的神经复合动作电位信号;以及
49、控制单元,该控制单元被配置成:
50、控制对如由刺激参数定义的神经刺激的施加;
51、经由该测量电路系统测量由该刺激诱发的神经复合动作电位反应;
52、根据该测得的诱发反应确定反馈变量;
53、实施完成反馈回路的反馈控制器,该反馈控制器使用该反馈变量来控制该刺激参数;并且
54、该控制单元进一步被配置成编译包括多个数据变量值的多维数据集,每个数据变量值与相应的神经刺激和相关联的测得的诱发反应相关联,该多维数据集包括该刺激参数和该反馈变量中的至少一个;并且
55、该控制单元进一步被配置成通过在获得每个多维数据集之后更新多维直方图以反映该多维数据集并且将该多维直方图存储在该设备的存储单元中,来随着时间的推移存储关于多个神经刺激和相应的相关联的测得的诱发反应的多个多维数据集。
56、根据第六方面,本发明提供了一种控制神经刺激的自动化方法,该方法包括:
57、向神经通路施加该神经刺激以在该神经通路上产生诱发动作电位,该刺激由刺激参数定义;
58、测量由该刺激诱发的神经复合动作电位反应,并且从该测得的诱发反应中得到反馈变量;
59、通过使用该反馈变量控制该刺激参数来完成反馈回路;
60、编译包括多个数据变量值的多维数据集,每个数据变量值与相应的神经刺激和相关联的测得的诱发反应相关联,该多维数据集包括该刺激参数和该反馈变量中的至少一个;以及
61、通过在获得每个多维数据集时更新多维直方图以反映该多维数据集,来随着时间的推移存储关于多个神经刺激和相应的相关联的测得的诱发反应的多个多维数据集。
62、在第五和第六方面的实施例中,多维直方图可以包括二维直方图。例如,该数据集可以包括两个数据变量值,这两个数据变量值包括该刺激参数和该反馈变量。多维直方图可以包括三维直方图或多于三维的直方图。
63、在一些实施例中,刺激参数可以包括刺激电流幅度。在一些实施例中,反馈变量可以包括观察到的ecap幅度,或者从其得到的变量。在一些实施例中,反馈变量可以从观察到的ecap幅度和相应的刺激参数中得到。
64、在一些实施例中,可以处理多维直方图以确定姿势。
65、在一些实施例中,可以通过应用箱翘曲函数将电流-电压数据的二维直方图转换成二维姿势-募集直方图。二维姿势-募集直方图可以用于获得一维姿势直方图和/或一维募集直方图。
66、在一些实施例中,可以处理多维直方图以通过执行直方图和/或翘曲直方图的聚类分析、强度分析和/或地形分析来确定姿势。
67、在一些实施例中,随着时间的推移重复确定姿势。
68、根据第七方面,本发明提供了一种用于可控地施加神经刺激的可植入设备,该设备包括:
69、多个电极,该多个电极包括一个或多个刺激电极和一个或多个感测电极;
70、刺激源,该刺激源用于提供要从该一个或多个刺激电极递送到神经通路的刺激以在该神经通路上产生诱发动作电位;
71、测量电路系统,该测量电路系统用于记录在该一个或多个感测电极处感测到的神经复合动作电位信号;以及
72、控制单元,该控制单元被配置成:
73、控制对如由至少一个刺激参数定义的神经刺激的施加;
74、经由该测量电路系统测量由该刺激诱发的神经复合动作电位反应;
75、根据该测得的诱发反应确定反馈变量;
76、实施完成反馈回路的反馈控制器,该反馈控制器使用该反馈变量来控制该至少一个刺激参数;并且
77、该控制单元进一步被配置成根据该反馈变量和该刺激参数中的至少一个来估计患者姿势。
78、根据第八方面,本发明提供了一种控制神经刺激的自动化方法,该方法包括:
79、向神经通路施加该神经刺激以在该神经通路上产生诱发动作电位,该刺激由至少一个刺激参数定义;
80、测量由该刺激诱发的神经复合动作电位反应,并且从该测得的诱发反应中得到反馈变量;
81、通过使用该反馈变量控制该至少一个刺激参数来完成反馈回路;以及
82、根据该反馈变量和该刺激参数中的至少一个来估计患者姿势。
83、在第七和第八方面的一些实施例中,反馈控制器通过使用反馈变量来控制至少一个刺激参数以将反馈变量维持在恒定水平来完成反馈回路。在第七和第八方面的一些实施例中,反馈控制器通过使用反馈变量来控制至少一个刺激参数以将神经募集维持在恒定水平来完成反馈回路。
84、根据另外的方面,本发明提供了一种用于可控地施加神经刺激的非暂态计算机可读介质,该非暂态计算机可读介质包括当由一个或多个处理器执行时执行本发明第二、第四、第六或第八方面的方法的指令。
85、在一些实施例中,反馈变量可以是以下各项中的任一项:幅度;能量;电力;积分;信号强度;或以下各项中的任一项的衍生物:整体诱发复合动作电位;例如在刺激后0ms至2ms的测量窗口中的快速神经反应;例如在刺激后2ms至6ms的测量窗口中的缓慢神经反应;或反应的过滤版本。在一些实施例中,反馈变量可以是在多个刺激/测量循环中确定的任何这种特性的平均值。在一些实施例中,反馈变量可以是ecap幅度对不同刺激电流的反应的线性部分的零截距或斜率。在一些实施例中,反馈变量可以从一个以上的前述特性中得到。
86、在一些实施例中,控制变量或刺激参数可以是总刺激电荷、刺激电流、脉冲幅度、相位持续时间、相间间隙持续时间或脉冲形状中的一个或多个,或者这些的组合。
87、在一些实施例中,可以根据本技术人例如在美国专利号9,386,934、国际专利公开号wo 2020/082118、国际专利公开号wo 2020/082126和/或国际专利公开号wo 2020/124135中的教导获得神经记录,每个专利的内容通过引用并入本文。
88、可以通过评估测得的神经反应来确定第二峰(例如,n1峰)的幅度和/或第三峰(例如,p2峰)的幅度,例如通过识别n1-p2峰-峰幅度,根据测得的神经反应确定反馈变量,以产生反馈变量。
89、在本发明的一些实施例中,测量电路系统被配置成在设备操作期间基本上连续地记录神经反应的记录。例如,在本发明的一些实施例中,植入式神经调节设备被配置成记录神经反应记录持续设备操作至少8小时的时段。在本发明的一些实施例中,植入式神经调节设备被配置成记录神经反应记录持续设备操作至少2天的时段。在本发明的一些实施例中,植入式神经调节设备被配置成记录神经反应记录持续设备操作至少5天的时段。为此,本发明的优选实施例提供了用于被配置成基本上实时地处理神经反应的每个记录以获得神经激活的相应度量的植入式神经调节设备,并且进一步提供了用于在存储器中仅存储神经激活的度量而不是整个记录的植入式神经调节设备。例如,植入式神经调节设备可以在存储器中以多个箱的形式存储多个神经激活度量的直方图,每次获得额外的神经激活度量时,与相应箱相关联的计数器递增。这些实施例允许在数小时或数天时段内以高速率(如50hz或更高)获得这种数据,并且通过使用直方图以非常紧凑的方式存储这些数据,并且由此避免超过可植入设备的有限存储器限制。可以为每个箱分配宽度或范围,该宽度或范围对于每个箱是相等的。可替代地,可以为箱分配相应的宽度,该宽度随着神经激活水平的增加而增加,如线性增加的箱宽度或指数增加的箱宽度。
90、本文提到的估计、确定、比较等应理解为是指由处理器对数据执行的自动过程,该处理器操作以执行适于实现所描述的(多个)估计、确定和/或比较步骤的预定程序。本文提出的方法可以用硬件(例如,使用数字信号处理器、专用集成电路(asic)或现场可编程门阵列(fpga))或软件(例如,使用有形地存储在计算机可读介质上的指令,用于使数据处理系统执行本文描述的步骤)或硬件和软件的组合来实施。本发明还可以实施为计算机可读介质上的计算机可读代码。计算机可读介质可以包括可以存储数据的任何数据存储设备,这些数据随后可以被计算机系统读取。计算机可读介质的示例包括只读存储器(“rom”)、随机存取存储器(“ram”)、磁带、光学数据存储设备、闪存设备或任何其他合适的存储设备。计算机可读介质还可以分布在网络耦合的计算机系统上,使得计算机可读代码以分布方式存储和/或执行。
91、具体地,应当理解,编译、分析或以其他方式处理本文定义的“直方图”应当被理解为包括表示直方图的数据,无论是否曾经产生过这种数据的图形表示。
- 还没有人留言评论。精彩留言会获得点赞!