万向蛇骨组件、手术器械及分体式手术装置的制作方法
1.本发明涉及手术机器人技术领域,具体涉及一种万向蛇骨组件、手术器械及分体式手术装置。
背景技术:
2.随着科技的发展,为进一步减轻患者的病痛,手术器械也越来越多的应用到临床手术中。其中,手术器械因其使用的便捷性,在医疗手术的应用中较为普遍。
3.目前,由于单向万向钳头组件的手术器械受器械钳弯曲机构操作自由度与活动范围限制,只能单向转动且转动角度较小,在使用时仍然不可避免配合大幅度肩部或肘部扭转,使用效果不佳,因此转动角度更大的两自由度万向钳头组件的手术器械的应用更为普遍。两自由度万向钳头组件包括自由万向钳头组件和多个活动关节,通过多个活动关节控制万向钳头组件的转动。
4.然而,两自由度万向钳头组件的手术器械在弯曲的过程中,两自由度万向钳头组件的手术器械在两个自由度上不能够联动,且受活动关节的限制,使得手术器械的弯曲范围受限,进而使得手术器械的使用灵活性受限,给手术的操作带来了局限性。
技术实现要素:
5.本发明实施例提供了一种万向蛇骨组件、手术器械及分体式手术装置,以解决相关技术中手术器械使用灵活性受限的问题。
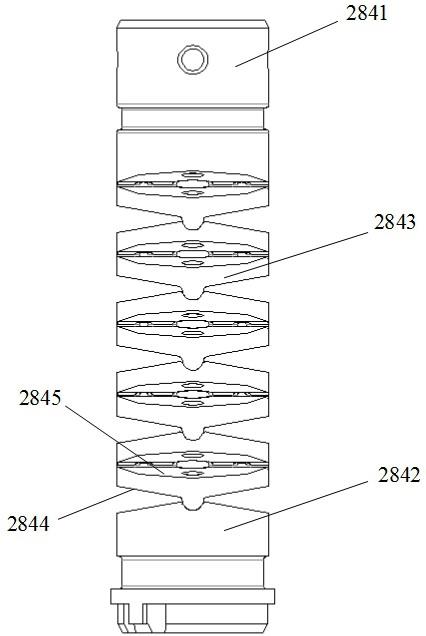
6.为了解决上述技术问题,本发明是这样实现的:第一方面,本发明实施例提供了一种万向蛇骨组件,包括椎骨前端、椎骨后端和多个蛇骨;每个蛇骨为圆盘状,每个蛇骨包括相对的第一面和第二面,第一面包括对称的第一倾斜面和第二倾斜面,且第一倾斜面和第二倾斜面之间设置有凸起结构,凸起结构沿第一面的径向延伸;第二面包括对称的第三倾斜面和第四倾斜面,且第三倾斜面和第四倾斜面之间设置有凹槽结构,凹槽结构沿第二面的径向延伸,其中,第一倾斜面的倾斜方向和第三倾斜面的倾斜方向相同,第二倾斜面的倾斜方向和第四倾斜面的倾斜方向相同;相邻两个蛇骨通过第一面和第二面连接,凸起结构嵌入到凹槽结构中,且多个蛇骨位于椎骨前端和椎骨后端之间。
7.可选的,万向蛇骨组件还包括驱动钢丝,每个蛇骨上开设有第一通孔、第二通孔、第三通孔、第四通孔和第五通孔;第一通孔位于蛇骨的轴线处,且贯穿第一面和第二面;第二通孔贯穿第一倾斜面和第三倾斜面设置,第三通孔贯穿第二倾斜面和第四倾斜面设置;第四通孔和第五通孔贯穿凹槽结构和凸起结构设置,且第四通孔和第五通孔位于
第一通孔的两侧;多个蛇骨中的第一通孔、第二通孔、第三通孔、第四通孔和第五通孔均穿设有一根驱动钢丝。
8.可选的,第二通孔、第三通孔、第四通孔和第五通孔以第一通孔为轴中心对称分布。
9.可选的,第一通孔的两端、第二通孔的两端、第三通孔的两端、第四通孔的两端和第五通孔的两端均为圆角结构。
10.可选的,万向蛇骨组件还包括第一压接头和第二压接头,椎骨前端靠近蛇骨的一端的表面和第一面的结构相同、椎骨后端靠近蛇骨的一端表面和第二面的结构相同;穿过第一通孔和第二通孔的两个驱动钢丝的第一端通过第一压接头固定在椎骨前端远离蛇骨的一端,穿过第一通孔和第二通孔的两个驱动钢丝的第二端从椎骨后端远离蛇骨的一端伸出;穿过第三通孔和第四通孔的两个驱动钢丝的第一端通过第二压接头固定在椎骨前端远离蛇骨的一端,穿过第三通孔和第四通孔的两个驱动钢丝的第二端从椎骨后端远离蛇骨的一端伸出。
11.可选的,第一倾斜面的倾斜角度、第二倾斜面的倾斜角度、第三倾斜面的倾斜角度、第四倾斜面的倾斜角度均相等,其中,倾斜角度为倾斜面所在的平面和第一平面之间的夹角,其中,第一平面为与蛇骨的轴线垂直的表面。
12.可选的,第一倾斜面的倾斜角度、第二倾斜面的倾斜角度、第三倾斜面的倾斜角度、第四倾斜面的倾斜角度均大于或者等于7
°
,且小于或者等于15
°
。
13.可选的,凸起结构的凸起方向和凹槽结构的延伸方向垂直。
14.可选的,凸起结构为半圆形弧状凸起,凹槽结构为半圆形弧状凹槽。
15.可选的,蛇骨的个数为奇数。
16.可选的,蛇骨的节距大于或者等于1mm,且小于或者等于2mm,其中,节距为凸起结构的中心轴线和凹槽结构的中心轴线之间的距离。
17.第二方面,本发明实施例提供了一种手术器械,包括万向钳头组件、入腹管、可拆卸钻夹和第一方向任一实施例所述的万向蛇骨组件;万向钳头组件连接在椎骨前端,入腹管的第一端和椎骨后端连接,入腹管的第二端和可拆卸钻夹连接,其中,可拆卸钻夹用于连接动力主机,动力主机用于提供万向蛇骨组件弯曲所需的动力源。
18.可选的,可拆卸钻夹包括钢丝固圈、盘坐、驱动丝接套和多个第一对接母轴,万向蛇骨组件包括第一驱动钢丝、第二驱动钢丝、第三驱动钢丝和第四驱动钢丝;钢丝固圈固定在入腹管的第二端和盘座之间,驱动丝接套连接在盘坐上;第一驱动钢丝、第二驱动钢丝、第三驱动钢丝和第四驱动钢丝依次穿过钢丝固圈、盘坐、驱动丝接套和相对应的第一对接母轴固定连接。
19.可选的,万向钳头组件包括钳下颚、钳上颚、内u形夹和外u形夹;钳下颚和钳上颚活动连接在外u形夹上,内u形夹和外u形夹铰接,且外u形夹开设有滑动槽,内u形夹沿滑动槽的延伸方向相对于外u形夹滑动;外u形夹的端部和椎骨前端的端部均为套筒结构,外u形夹的端部嵌套在椎骨前端
的端部。
20.可选的,万向蛇骨组件包括第五驱动钢丝,可拆卸钻夹还包括第二对接母轴;第一驱动钢丝、第二驱动钢丝、第三驱动钢丝、第四驱动钢丝以第五驱动钢丝为轴线中心对称分布;第五驱动钢丝的第一端与内u形夹的端部固定,第五驱动钢丝的第二端穿过入腹管、钢丝固圈、盘坐与驱动丝接套固定连接,驱动丝接套和第二对接母轴固定连接,在第二对接母轴转动的情况下,外u形夹发生转动。
21.可选的,万向蛇骨组件还包括拉杆焊接套和拉杆;第五驱动钢丝的第二端固定在拉杆焊接套开设的固定孔中,拉杆焊接套的端部与拉杆的一端焊接,拉杆的另一端穿过入腹管;第五驱动钢丝和拉杆焊接套的连接处套设有热缩管。
22.可选的,万向蛇骨组件的外部包裹有弯曲胶管。
23.可选的,手术器械还包括拨挡片、接口壳和锥壳;锥壳套接在盘坐外圈,接口壳的第一端和锥壳的端部固定连接,拨挡片活动连接在接口壳和锥壳的连接处的间隙中;拨挡片包括多个限位孔,第二对接母轴和多个第一对接母轴均卡接在限位孔中,当拨挡片发生滑动的情况下,第一对接母轴和第二对接母轴锁止在限位孔中。
24.可选的,接口壳的第二端设置有多个磁体,多个磁体连接于接口壳的第二端的不同位置,磁体用于识别相关器械。
25.第三方面,本发明实施例还提供了一种分体式手术装置,分体式手术装置包括动力主机和第二方面任一实施例所述的手术器械;动力主机和可拆卸钻夹配合连接,以控制万向钳头组件按照预设轨迹运动。
26.从上述实施例可以看出,在本发明实施例中,由于每个蛇骨包括相对的第一面和第二面,第一面包括对称的第一倾斜面和第二倾斜面,且第一倾斜面和第二倾斜面之间设置有凸起结构,凸起结构沿第一面的径向延伸;第二面包括对称的第三倾斜面和第四倾斜面,且第三倾斜面和第四倾斜面之间设置有凹槽结构,凹槽结构沿第二面的径向延伸,第一倾斜面的倾斜方向和第三倾斜面的倾斜方向相同,第二倾斜面的倾斜方向和第四倾斜面的倾斜方向相同,因此万向蛇骨组件的椎骨后端受到任一方向的外部拉力时,该方向上的第一倾斜面和第三倾斜面之间的缝隙形状发生变化或者第二倾斜面和第四倾斜面之间的缝隙形状发生变化,且随着外部拉力的方向和大小不同,第一倾斜面和第三倾斜面之间的缝隙形状发生变化或者第二倾斜面和第四倾斜面之间的缝隙形状也不同,使得万向蛇骨组件弯曲的方向和角度也不同,进而使得万向蛇骨组件可以全方位进行弯曲,使得手术操作的过程不受弯曲方向的限制,提升了手术操作便利性,更加方便操作者的使用。
附图说明
27.图1表示本发明实施例提供的一种万向蛇骨组件在未弯曲状态下的结构示意图;图2表示本发明实施例提供的一种万向蛇骨组件在弯曲状态下的结构示意图;图3表示本发明实施例提供的一种蛇骨的第一面的结构的示意图;图4表示本发明实施例提供的一种蛇骨的第二面的结构的示意图;
图5表示本发明实施例提供的相邻两个蛇骨的装配示意图;图6表示本发明实施例提供的多个蛇骨的装配示意图;图7表示本发明实施例提供的驱动钢丝和多个蛇骨的连接示意图;图8表示本发明实施例提供的蛇骨的节距的示意图;图9表示本发明实施例提供的蛇骨的第三倾斜面和第四倾斜面的倾斜角度示意图;图10表示本发明实施例提供的蛇骨的第一倾斜面和第二倾斜面的倾斜角度示意图;图11表示本发明实施例提供的万向蛇骨组件在单个方向上的弯曲示意图;图12表示本发明实施例提供的万向蛇骨组件在多个方向上的弯曲示意图;图13表示本发明实施例提供的驱动钢丝的在万向蛇骨组件以不同弯曲状态弯曲的路径示意图;图14表示本发明实施例提供的万向蛇骨组件在不同弯曲方向下的弯曲原理示意图;图15表示本发明实施例提供的手术器械的结构示意图;图16表示本发明实施例提供的手术器械的爆炸结构示意图;图17表示本发明实施例提供的手术器械的各部件的装配示意图;图18表示本发明实施例提供的手术器械以图17中a-a方向的剖面示意图;图19表示本发明实施例提供的手术器械的转动原理示意图;图20表示本发明实施例提供的万向蛇骨组件和可拆卸钻夹的装配示意图;图21表示本发明实施例提供的手术器械的外部结构示意图;图22表示本发明实施例提供的手术器械以图21中b-b方向的剖面示意图;图23表示本发明实施例提供的万向钳头组件的一种结构示意图;图24表示本发明实施例提供的万向钳头组件的另一种结构示意图;图25表示本发明实施例提供的锥壳中各部件的装配示意图;图26表示本发明实施例提供的分体式手术装置的结构示意图。
28.附图标记:20-分体式手术装置;27-动力主机;28-手术器械;280-可拆卸钻夹;284-万向蛇骨组件;305-万向钳头组件;301-接口壳;302-锥壳;303-拨挡片;304-入腹管;306-磁体;2841-椎骨前端、2842-椎骨后端;2843-蛇骨;2844-第一面;2845-第二面 ;2846-第一倾斜面;2847-第二倾斜面;2848-第三倾斜面;2849-第四倾斜面;2850-凸起结构;2851-凹槽结构;2852-第一通孔;2853-第二通孔;2854-第三通孔;2855-第四通孔;2856-第五通孔;2857-第一驱动钢丝;2858-第二驱动钢丝;2859-第三驱动钢丝;2860-第四驱动钢丝;2861-第五驱动钢丝;2862-第一压接头;2863-第二压接头;2864-热缩管;2865-弯曲胶管;2866-拉杆焊接套;2867-拉杆;2801-钢丝固圈;2802-盘坐:2803-驱动丝接套;2804-第一对接母轴;2805-第二对接母轴;2806-定管;3051-钳下颚;3052-钳上颚;3053-内u形夹;3054-外u形夹。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.应理解,说明书通篇中提到的“一个实施例”或“一实施例”意味着与实施例有关的特定特征、结构或特性包括在本发明的至少一个实施例中。因此,在整个说明书各处出现的“在一个实施例中”或“在一实施例中”未必一定指相同的实施例。此外,这些特定的特征、结构或特性可以任意适合的方式结合在一个或多个实施例中。
31.第一方面,本发明实施例提供了一种万向蛇骨组件,如图1至图4所示,该万向蛇骨组件包括椎骨前端2841、椎骨后端2842和多个蛇骨2843;每个蛇骨2843为圆盘状,每个蛇骨2843包括相对的第一面2844和第二面2845,第一面2844包括对称的第一倾斜面2846和第二倾斜面2847,且第一倾斜面2846和第二倾斜面2847之间设置有凸起结构2850,凸起结构2850沿第一面2844的径向延伸;第二面2845包括对称的第三倾斜面2848和第四倾斜面2849,且第三倾斜面2848和第四倾斜面2849之间设置有凹槽结构2851,凹槽结构2851沿第二面2845的径向延伸,其中,第一倾斜面2846的倾斜方向和第三倾斜面2848的倾斜方向相同,第二倾斜面2847的倾斜方向和第四倾斜面2849的倾斜方向相同;相邻两个蛇骨2843通过第一面2844和第二面2845连接,凸起结构2850嵌入到凹槽结构2851中,且多个蛇骨2843位于椎骨前端2841和椎骨后端2842之间。
32.其中,如图3和图4所示,蛇骨2843为万向蛇骨组件可弯曲的基本单元,每个蛇骨2843为圆盘状。每个蛇骨2843包括相对的第一面2844和第二面2845,第一面2844中以直径为对称轴设置有对称的第一倾斜面2846和第二倾斜面2847,第二面2845中以直径为对称轴设置有互相对称的第三倾斜面2848和第四倾斜面2849。其中,第一倾斜面2846、第二倾斜面2847、第三倾斜面2848和第四倾斜面2849均沿靠近蛇骨2843的第一平面的方向倾斜,即第一倾斜面2846所在的平面与蛇骨2843的第一平面之间的夹角、第二倾斜面2847所在的平面与蛇骨2843的第一平面之间的夹角、第三倾斜面2848所在的平面与蛇骨2843的第一平面之间的夹角、第四倾斜面2849所在的平面与蛇骨2843的第一平面之间的夹角均为锐角,第一平面为与蛇骨的轴线垂直的平面。
33.此外,第一倾斜面2846、第二倾斜面2847、第三倾斜面2848与第四倾斜面2849的表面较为平整,结构简单,便于加工。在小批量制作时,线切割及钻床即可完成零件加工,在大批量生产时,零件轮廓又符合模具生产需求,由于是薄壁型零件且壁厚均匀,即不存在拔模角度问题,有利于降低万向蛇骨组件的生产制造成本。
34.第一倾斜面2846和第二倾斜面2847之间还设置有凸起结构2850,凸起结构2850沿第一面2844的径向延伸,即凸起结构2850的延伸长度和第一面2844的直径相等。第三倾斜面2848和第四倾斜面2849之间设置有凹槽结构2851,凹槽结构2851沿第二面2845的径向延伸,即凹槽结构2851的延伸长度和第二面2845的直径相等。在装配时,多个蛇骨2843之间依次连接在椎骨前端2841和椎骨后端2842之间,每相邻两个蛇骨2843的第一面2844和第二面2845连接,且使得凸起结构2850嵌入到凹槽结构2851中。这样,在万向蛇骨组件装配完成后,当万向蛇骨组件的椎骨后端2842受到不同方向外部拉力时,多个蛇骨2843之间以不同
方向发生弯曲。
35.具体的,由于第一倾斜面2846的倾斜方向和第三倾斜面2848的倾斜方向相同,第二倾斜面2847的倾斜方向和第四倾斜面2849的倾斜方向相同,因此万向蛇骨组件的椎骨后端2842受到任一方向的外部拉力时,该方向上的第一倾斜面2846和第三倾斜面2848之间的缝隙形状发生变化或者第二倾斜面2847和第四倾斜面2849之间的缝隙形状发生变化,且随着外部拉力的方向和大小不同,第一倾斜面2846和第三倾斜面2848之间的缝隙形状发生变化或者第二倾斜面2847和第四倾斜面2849之间的缝隙形状也不同,使得万向蛇骨组件弯曲的方向和角度也不同,进而使得万向蛇骨组件可以全方位进行弯曲,使得手术操作的过程不受弯曲方向的限制,提升了手术操作便利性,更加方便操作者的使用。
36.在一些实施例中,如3和图4所示,万向蛇骨组件还包括驱动钢丝,每个蛇骨2843上开设有第一通孔2852、第二通孔2853、第三通孔2854、第四通孔2855和第五通孔2856;第一通孔2852位于蛇骨2843的轴线处,且贯穿第一面2844和第二面2845;第二通孔2853贯穿第一倾斜面2846和第三倾斜面2848设置,第三通孔2854贯穿第二倾斜面2847和第四倾斜面2849设置;第四通孔2855和第五通孔2856贯穿凹槽结构2851和凸起结构2850设置,且第四通孔2855和第五通孔2856位于第一通孔2852的两侧;多个蛇骨2843中的第一通孔2852、第二通孔2853、第三通孔2854、第四通孔2855和第五通孔2856均穿设有一根驱动钢丝。
37.需要说明的是,由于第二通孔2853贯穿第一倾斜面2846和第三倾斜面2848设置,第三通孔2854贯穿第二倾斜面2847和第四倾斜面2849设置;第四通孔2855和第五通孔2856贯穿凹槽结构2851和凸起结构2850设置,且第四通孔2855和第五通孔2856位于第一通孔2852的两侧,因此在多个蛇骨2843中的第一通孔2852、第二通孔2853、第三通孔2854、第四通孔2855和第五通孔2856均穿设有一根驱动钢丝之后,当拉动某一根驱动钢丝或者某两根驱动钢丝时,与该驱动钢丝穿过的倾斜面之间的间隙形状发生变化,万向蛇骨组件发生与之对应的弯曲。
38.为保证万向蛇骨组件在各个方向上弯曲时的举升力相等,第二通孔2853、第三通孔2854、第四通孔2855和第五通孔2856以第一通孔2852为轴中心对称分布,其中,举升力为万向蛇骨组件沿第二通孔307的轴线方向所受的力,即相邻两个蛇骨2843之间所受驱动钢丝的拉力。需要说明的是,由于第一通孔2852位于蛇骨2843的轴线处,在第二通孔2853、第三通孔2854、第四通孔2855和第五通孔2856以第一通孔2852为轴中心对称分布的情况下,使得每个通孔和蛇骨2843的轴线之间的间距的分布角度均相等,这样,在任一通孔中的驱动钢丝发生拉动时,在沿蛇骨2843轴线方向上的分力相等,使得万向蛇骨组件在各个方向上弯曲时的举升力相等,进而使得万向蛇骨组件的弯曲控制的稳定性更高。
39.此外,当万向蛇骨组件弯曲,第一倾斜面2846和第三倾斜面2848之间的缝隙形状发生变化或者第二倾斜面2847和第四倾斜面2849之间的缝隙形状发生变化时,相邻的驱动钢丝路径穿过的通孔会产生错位,使驱动钢丝和通孔之间的摩擦力增加甚至卡死,同时也使得通孔与驱动钢丝接触面上产生了尖角接触,刮削驱动钢丝表面,造成驱动钢丝断裂器械失效或表面粗糙度增大影响万向蛇骨组件的弯曲驱动效果。基于此,第一通孔2852的两端、第二通孔2853的两端、第三通孔2854的两端、第四通孔2855的两端和第五通孔2856的两端均为圆角结构,这样,可以降低驱动钢丝在驱动时和通孔之间的摩擦力,避免通孔与驱动钢丝接触面上产生尖角接触,进而保证万向蛇骨组件的弯曲驱动效果。
40.驱动钢丝与多个蛇骨2843之间的具体连接方式如下所示:如图6所示,驱动钢丝包括第一驱动钢丝2857、第二驱动钢丝2858、第三驱动钢丝2859和第四驱动钢丝2860;第一驱动钢丝2857穿过多个蛇骨2843的第二通孔2853,第二驱动钢丝2858穿过多个蛇骨2843的第三通孔2854,第三驱动钢丝2859穿过多个蛇骨2843的第四通孔2855,第四驱动钢丝2860穿过多个蛇骨2843的第五通孔2856。
41.需要说明的是,通过上述连接方式可以实现万向蛇骨组件全方位的弯曲。具体的,如图14所示,当拉动第三驱动钢丝2859、放松第四驱动钢丝2860时,万向蛇骨组件向图示的a方向弯曲。当拉动第四驱动钢丝2860、放松第三驱动钢丝2859时,万向蛇骨组件向图示的b方向弯曲。当拉动第一驱动钢丝2857、放松第二驱动钢丝2858,万向蛇骨组件向图示的c方向弯曲。当拉动第二驱动钢丝2858、放松第一驱动钢丝2857,万向蛇骨组件向图示的d方向弯曲。当同时拉动第三驱动钢丝2859和第四驱动钢丝2860、放松第一驱动钢丝2857和第二驱动钢丝2858时,万向蛇骨组件向图示的a方向和b方向之间的方向弯曲。当同时拉动第四驱动钢丝2860和第一驱动钢丝2857、放松第二驱动钢丝2858和第三驱动钢丝2859时,万向蛇骨组件向图示的b方向和c方向之间的方向弯曲。当拉动第一驱动钢丝2857和第二驱动钢丝2858、放松第三驱动钢丝2859和第四驱动钢丝2860时,万向蛇骨组件向图示的c方向和d方向之间的方向弯曲。当拉动第二驱动钢丝2858和第三驱动钢丝2859、放松第一驱动钢丝2857和第四驱动钢丝2860时,万向蛇骨组件向图示的a方向和d方向之间的方向弯曲。由此可见,可以通过控制驱动钢丝的选择及驱动钢丝的位移量实现对万向蛇骨组件弯曲方向以及弯曲角度的控制,使得手术操作的过程不受弯曲方向的限制,提升了手术操作便利性。其中,万向蛇骨组件的弯曲方向和图11和图12中f所示的方向一致。
42.可选的,如图7所示,万向蛇骨组件还包括第一压接头2862和第二压接头2863,椎骨前端2841靠近蛇骨2843的一端的表面和第一面2844的结构相同、椎骨后端2842靠近蛇骨2843的一端表面和第二面2845的结构相同;第一驱动钢丝2857的第一端和第二驱动钢丝2858的第一端通过第一压接头2862固定在椎骨前端2841远离蛇骨2843的一端,第一驱动钢丝2857的第二端和第二驱动钢丝2858的第二端从椎骨后端2842远离蛇骨2843的一端伸出;第三驱动钢丝2859的第一端和第四驱动钢丝2860的第一端通过第二压接头2863固定在椎骨前端2841远离蛇骨2843的一端,第三驱动钢丝2859的第二端和第四驱动钢丝2860的第二端从椎骨后端2842远离蛇骨2843的一端伸出。
43.需要说明的是,由于椎骨前端2841靠近蛇骨2843的一端的表面和第一面2844的结构相同、椎骨后端2842靠近蛇骨2843的一端表面和第二面2845的结构相同,因此在装配时只需将驱动钢丝依次穿过蛇骨2843,将驱动钢丝的第一端与椎骨前端2841的第一压接头2862和第二压接头2863固定,驱动钢丝的第二端从椎骨后端2842处拉紧,多个蛇骨2843即可以在驱动钢丝限位下组成活动组件,无需其他零部件配合装配,使得整个万向蛇骨组件的装配更为简便,进一步节省了加工制造成本去,且可以通过椎骨前端2841与椎骨后端2842给其它部件的装配提供装配空间,使得装配更为简便,且使得整个万向蛇骨组件的结构更为紧凑。
44.需要说明的是,由于现有的两自由度的万向钳头组件305受关节之间连接方式影响,弯曲半径较大,无法在小空间内完成复杂操作,基于此,本发明实施例还通过优化每个蛇骨2843的参数,如节距,倾斜面的倾斜角度、凸起结构2850及凹槽结构2851的形状等使得
万向蛇骨组件可以在小空间内完成复杂操作,具体如下:在一些实施例中,如图9和图10所示,第一倾斜面2846的倾斜角度、第二倾斜面2847的倾斜角度、第三倾斜面2848的倾斜角度、第四倾斜面2849的倾斜角度均相等,其中,倾斜角度为倾斜面所在的平面和蛇骨2843的第一平面之间的夹角,其中,第一平面为与蛇骨2843的轴线垂直的表面。需要说明的是,在第一倾斜面2846的倾斜角度、第二倾斜面2847的倾斜角度、第三倾斜面2848的倾斜角度、第四倾斜面2849的倾斜角度均相等的情况下,当拉动不同的驱动钢丝时,可以使得第一倾斜面2846和第三倾斜面2848之间的缝隙形状发生的变化和第二倾斜面2847和第四倾斜面2849之间的缝隙形状发生的变化的范围相等,有利于万向蛇骨组件在各个方向上弯曲的角度的范围保持一致,进而使得整个万向蛇骨组件在不同方向上弯曲时均能保持结构的稳定性。且当单个自由度方向牵拉或两个自由度方向的两根驱动钢丝同时牵拉多个蛇骨2843,引导万向蛇骨组件向两方向夹角位置弯曲时,由于蛇骨2843的第一面2844和第二面2845的倾斜角度相同,因此不会产生类锯齿状轮廓,不会造成操作时的小角度倾斜面外漏,进而不会影响万向蛇骨组件外套的弯曲胶管2865的包裹效果。其中,第一倾斜面2846的倾斜角度、第二倾斜面2847的倾斜角度如图10中的角β所示,第三倾斜面2848的倾斜角度、第四倾斜面2849的倾斜角度如图10中的角α所示。
45.进一步,第一倾斜面2846的倾斜角度、第二倾斜面2847的倾斜角度、第三倾斜面2848的倾斜角度、第四倾斜面2849的倾斜角度均大于或者等于7
°
,且小于或者等于15
°
。
46.需要说明的是,在第一倾斜面2846的倾斜角度、第二倾斜面2847的倾斜角度、第三倾斜面2848的倾斜角度、第四倾斜面2849的倾斜角度均大于或者等于7
°
,且小于或者等于15
°
的情况下,可以使得万向蛇骨组件可以弯曲90
°
的极限弯曲需求,且可以有效地保障驱动钢丝内置,进而避免驱动钢丝外置对患者的内部组织造成损伤风险,避免划伤器官组织,同时避免器官组织靠近椎骨节组件时被挤压,或者避免出现万向蛇骨组件在弯曲过程中,相邻两组蛇骨2843的倾斜面夹伤器官组件发生,进一步提升万向蛇骨组件的安全性能。
47.此外,凸起结构2850的凸起方向和凹槽结构2851的延伸方向垂直。这样,在驱动钢丝拉直绷紧多个蛇骨2843后,使得凸起结构2850可以完全嵌入到凹槽结构2851中,在经过多组蛇骨2843配合累积后,不会造成椎骨节组件在使用前发生弯曲,进而不会影响万向蛇骨组件正常在插入手术通道中。
48.可选的,凸起结构2850为半圆形弧状凸起,凹槽结构2851为半圆形弧状凹槽。这样,可以保证每个蛇骨2843的旋转角度,进而可以预留一定的旋转余量,进而可以在椎骨接组件弯曲内侧给外部套设弯曲胶管2865留下余量,以满足最大旋转角度的需求,同时方便蛇骨2843的拔模出料,提升可加工性。
49.在一些实施例中,蛇骨2843的个数为奇数。这样,在蛇骨2843为奇数时,保证两自由度方向关节对数量一致,实现运动参数值,例如位移量,牵拉速度一致。示例性的,以5个蛇骨2843为例,在沿第一方向偏转20
°
时,5个蛇骨2843的第一倾斜面2846和第三倾斜面2848之间的缝隙变化带来的弯曲量叠加也为100
°
,在沿与第一方向相反的方向偏转20
°
时,5个蛇骨2843的第二倾斜面2847和第四倾斜面2849之间的缝隙变化带来的弯曲量叠加量也为100
°
,即可以使得万向蛇骨组件在弯曲时保持结构的稳定性。示例性的,如图13所示,l1表示万向蛇骨组件在直线状态下时驱动钢丝的路径,l2表示万向蛇骨组件在90
°
弯曲状态下时驱动钢丝的计算所得的路径,l3表示万向蛇骨组件在90
°
弯曲状态下时驱动钢丝的实
际路径。
50.在一些实施例中,如图8所示,蛇骨2843的节距大于或者等于1mm,且小于或者等于2mm,其中,节距为凸起结构2850的中心轴线和凹槽结构2851的中心轴线之间的距离,其中,凸起结构2850的中心轴线垂直于凹槽结构2851的延伸方向,凹槽结构2851的中心轴线和凹槽结构2851的延伸方向一致。这样,可以实现万向蛇骨组件在弯曲时可以以小角度进行弯曲,且可以使得驱动钢丝的路径趋于正圆形,便于计算弯曲角度与驱动钢丝位移函数关系,提高控制的稳定性。其中,凸起结构2850的中心轴线和图8中a所示的直线一致,凹槽结构2851的中心轴线和图8中的b所示的直线一致,蛇骨2843的节距和图8中p所示的距离一致。
51.从上述实施例可以看出,在本发明实施例中,由于每个蛇骨2843包括相对的第一面2844和第二面2845,第一面2844包括对称的第一倾斜面2846和第二倾斜面2847,且第一倾斜面2846和第二倾斜面2847之间设置有凸起结构2850,凸起结构2850沿第一面2844的径向延伸;第二面2845包括对称的第三倾斜面2848和第四倾斜面2849,且第三倾斜面2848和第四倾斜面2849之间设置有凹槽结构2851,凹槽结构2851沿第二面2845的径向延伸,第一倾斜面2846的倾斜方向和第三倾斜面2848的倾斜方向相同,第二倾斜面2847的倾斜方向和第四倾斜面2849的倾斜方向相同,因此万向蛇骨组件的椎骨后端2842受到任一方向的外部拉力时,该方向上的第一倾斜面2846和第三倾斜面2848之间的缝隙形状发生变化或者第二倾斜面2847和第四倾斜面2849之间的缝隙形状发生变化,且随着外部拉力的方向和大小不同,第一倾斜面2846和第三倾斜面2848之间的缝隙形状发生变化或者第二倾斜面2847和第四倾斜面2849之间的缝隙形状也不同,使得万向蛇骨组件弯曲的方向和角度也不同,进而使得万向蛇骨组件可以全方位进行弯曲,使得手术操作的过程不受弯曲方向的限制,提升了手术操作便利性,更加方便操作者的使用。
52.除此之外,在蛇骨2843的节距大于或者等于1mm,且小于或者等于2mm的情况下,可以实现万向蛇骨组件在弯曲时可以以小角度进行弯曲,降低了弯曲半径,使得万向蛇骨组件可以在小空间内完成复杂操作,进一步提升了手术操作便利性,且可以使得驱动钢丝的路径趋于正圆形,便于计算弯曲角度与驱动钢丝位移函数关系,提高控制的稳定性。
53.第二方面,如图15至22所示,本发明实施例还提供了一种手术器械,该手术器械包括万向钳头组件305、入腹管304、可拆卸钻夹280和第一方面任一实施例所述的万向蛇骨组件284;万向钳头组件305连接在椎骨前端284,入腹管304的第一端和椎骨后端2842连接,入腹管304的第二端和可拆卸钻夹280连接。这样,由于万向钳头组件305连接在椎骨前端2841连接,入腹管304的第一端和椎骨后端2842连接,入腹管304的第二端和可拆卸钻夹280连接,因此可以通过可拆卸钻夹280可拆卸钻夹用于连接动力主机27,为万向蛇骨组件284弯曲提供所需的动力源,又由于万向蛇骨组件284可以全方位进行弯曲,因此使得万向钳头组件305的工作方向和工作位置不受限,进而使得万向钳头组件305的可操作范围更大,更加便于操作者的使用。
54.具体的,可拆卸钻夹280可以包括钢丝固圈2801、盘坐2802、驱动丝接套2803和多个第一对接母轴2804,万向蛇骨组件284包括第一驱动钢丝2857、第二驱动钢丝2858、第三驱动钢丝2859和第四驱动钢丝2860;钢丝固圈2801固定在入腹管304的第二端和盘座之间,驱动丝接套2803连接在盘坐2802上;第一驱动钢丝2857、第二驱动钢丝2858、第三驱动钢丝2859和第四驱动钢丝2860依次穿过钢丝固圈2801、盘坐2802、驱动丝接套2803和相对应的
第一对接母轴2804固定连接,第一驱动钢丝2857、第二驱动钢丝2858、第三驱动钢丝2859、第四驱动钢丝2860以盘坐2802的轴线为对称轴中心对称分布。
55.其中,钢丝固圈2801为将第一驱动钢丝2857、第二驱动钢丝2858、第三驱动钢丝2859和第四驱动钢丝2860从入腹管304引出的圆环状固定连接,盘坐2802为将第一驱动钢丝2857、第二驱动钢丝2858、第三驱动钢丝2859和第四驱动钢丝2860分分离的圆锥体固定件。连接在钢丝固圈2801和盘坐2802之间的第一驱动钢丝2857、第二驱动钢丝2858、第三驱动钢丝2859、第四驱动钢丝2860与入腹管304的长度方向之间具有夹角,进而在第一驱动钢丝2857、第二驱动钢丝2858、第三驱动钢丝2859、第四驱动钢丝2860经过盘坐2802后被分离在多个方向上,且使得第一驱动钢丝2857、第二驱动钢丝2858、第三驱动钢丝2859、第四驱动钢丝2860之间的间距增大,更有利于操作者的操作。盘坐2802上还开设有四个定管2806,定管2806的长度方向和入腹管304的长度方向平行,第一驱动钢丝2857、第二驱动钢丝2858、第三驱动钢丝2859、第四驱动钢丝2860分别穿过一个定管2806与驱动丝接套2803固定连接,这样,使得第一驱动钢丝2857、第二驱动钢丝2858、第三驱动钢丝2859、第四驱动钢丝2860的端部又回到和入腹管304的长度方向平行的状态,方便操作者的控制。每个驱动丝接套2803插入第一对接母轴2804的凹槽中,第一对接母轴2804用于和外部动力主机27107的对接母轴连接,以方便对第一驱动钢丝2857、第二驱动钢丝2858、第三驱动钢丝2859、第四驱动钢丝2860的自动化控制。
56.具体的,如图23和图24所示,万向钳头组件305可以包括钳下颚3051、钳上颚3052、内u形夹3053和外u形夹3054;钳下颚3051和钳上颚3052活动连接在外u形夹3054上,内u形夹3053和外u形夹3054铰接,且外u形夹3054开设有滑动槽,内u形夹3053沿滑动槽的延伸方向相对于外u形夹3054滑动;外u形夹3054的端部和椎骨前端2841的端部均为套筒结构,外u形夹3054的端部嵌套在椎骨前端2841的端部。
57.需要说明的是,由于钳下颚3051和钳上颚3052铆接在外u形夹3054上,外u形夹3054的端部嵌套在椎骨前端2841的端部,因此当万向蛇骨组件284发生弯曲时,可以使得万向钳头组件305的位置发生变化,且由于万向蛇骨组件284可以全方位进行弯曲,因此使得万向钳头组件305的工作方向和工作位置不受限。此外,由于钳下颚3051和钳上颚3052铆接在外u形夹3054上,内u形夹3053和外u形夹3054铰接,且外u形夹3054开设有滑动槽,内u形夹3053沿滑动槽的延伸方向相对于外u形夹3054滑动,因此可以通过内u形夹3053在外u形夹3054槽内移动可以带动钳下颚3051与钳上颚3052实现夹合动作。还需要说明的是,在外u形夹3054的端部嵌套在椎骨前端2841的端部之后,还可以通过销钉进行限位,即销钉穿过椎骨前端2841的端部抵压在外u形夹3054的端部,使得外u形夹3054可以在椎骨前端2841的内腔中转动,当万向蛇骨组件284发生转动时,可以带动外u形夹3054,进而带动万向钳头组件305发生转动,实现万向钳头组件305的位置的转动。
58.可选的,如图19所示,万向蛇骨组件284包括第五驱动钢丝2861,可拆卸钻夹280还包括第二对接母轴2805; 第一驱动钢丝2857、第二驱动钢丝2858、第三驱动钢丝2859、第四驱动钢丝2860以第五驱动钢丝2861为轴线中心对称分布;第五驱动钢丝2861的第一端与内u形夹3053的端部固定,第五驱动钢丝2861的第二端穿过入腹管304、钢丝固圈2801、盘坐2802、驱动丝接套2803和第二对接母轴2805固定连接,在第二对接母轴2805转动的情况下,外u形夹3054发生转动。
59.可选的,万向蛇骨组件284还包括拉杆焊接套2866和拉杆2867;第五驱动钢丝2861的第二端固定在拉杆焊接套2866开设的固定孔中,拉杆焊接套2866的端部与拉杆2866的一端焊接,拉杆2867的另一端穿过入腹管304;第五驱动钢丝2861和拉杆焊接套2866的连接处套设有热缩管2864,万向蛇骨组件284的外部包裹有弯曲胶管2865。
60.需要说明的是,万向蛇骨组件284还可以包括拉杆焊接套2866、拉杆2867,拉杆焊接套2866中设置有固定孔,第五驱动钢丝2861的第二端可以固定在拉杆焊接套2866的固定孔中,拉杆焊接套2866的端部与拉杆2867的一端焊接,拉杆2867的另一端穿过入腹管304、钢丝固圈2801、盘坐2802与驱动丝接套2803固定连接,驱动丝接套2803和第二对接母轴2805固定连接,第二对接母轴2805可以和外部动力主机27107的对接母轴连接,以方便带动拉杆2867转动,进而实现第五驱动钢丝2861转动,最终带动万向钳头组件305发生转动,以改变万向钳头组件305的位置形态。
61.还需要说明的是,热缩管2864为特制的聚烯烃材质热收缩套管,外层采用优质柔软的交联聚烯烃材料及内层热熔胶复合加工而成的,外层材料有绝缘防蚀、耐磨等特点,内层有低熔点、防水密封和高粘结性等优点,这样,当第五驱动钢丝2861和拉杆焊接套2866的连接处套设有热缩管2864,可以降低第五驱动钢丝2861转动时与第一通孔2852之间的摩擦。弯曲胶管2865可以为橡胶、丁睛胶、丁苯等具有一定的耐磨性以及柔性的材料制作而成,可以使得弯曲胶管2865随着万向蛇骨组件284弯曲,进而避免划伤器官组织,使得手术器械28的安全性能更高。
62.可选的,如如图21和图25所示,手术器械28还包括拨挡片303、接口壳301和锥壳302;锥壳302套接在盘坐2802外圈,接口壳301的第一端和锥壳302的端部固定连接,拨挡片303活动连接在接口壳301和锥壳302的连接处的间隙中;拨挡片303包括多个限位孔,第二对接母轴2805和多个第一对接母轴2804均卡接在限位孔中,当拨挡片303发生滑动的情况下,第一对接母轴2804和第二对接母轴2805锁止在限位孔中。
63.需要说明的是,限位孔包括第一限位通孔和第二限位通孔,第一限位通孔的孔径大于第二限位通孔的孔径,且第二限位通孔的孔径大于第一对接母轴2804的直径以及第二对接母轴2805的直径。第一对接螺母轴和第二对接螺母上均开设有限位槽,这样,当滑动拨挡片303使得第一对接螺母轴和第二对接螺母轴位于第二限位通孔中时,第一对接螺母轴和第二对接螺母轴可以轴向移动或者转动。当滑动拨挡片303使得第一对接螺母轴和第二对接螺母轴卡接在第一限位通孔中时,使得第一对接螺母轴和第二对接螺母轴均被锁止,避免第一对接螺母轴和第二对接螺母轴可以轴向移动或者转动。由此可见,通过拨挡片303可以控制手术器械28运动的启动和停止,使得整个手术器械28的运动可控,安全性更高。
64.可选的,如图22所示,接口壳301的第二端设置有多个磁体306,多个磁体306按位于接口壳301的第二端的不同位置,磁体306用于识别相关器械。这样,可以通过磁体306来识别万向钳头组件305的种类,更精确的和动力主机进行配合使用。
65.从上述实施例可以出,由于万向钳头组件305连接在椎骨前端2841连接,入腹管304的第一端和椎骨后端2842连接,入腹管304的第二端和可拆卸钻夹280连接,因此可以通过可拆卸钻夹280控制多个蛇骨2843的弯曲角度及弯曲方向,又由于万向蛇骨组件284可以全方位进行弯曲,因此使得万向钳头组件305的工作方向和工作位置不受限,进而使得万向钳头组件305的可操作范围更大,更加便于操作者的使用。
66.第三方面,如图26所示,本发明实施例还提供了一种分体式手术装置20,其特征在于,分体式手术装置20包括动力主机2和第二方面任一项的手术器械28;动力主机27和可拆卸钻夹280配合连接,以控制万向钳头组件305按照预设轨迹运动。当分体式手术装置20包括第二方面任一项的手术器械28时,分体式手术装置20所具有的有益效果和前述手术器械28所具有的有益效果一致,本发明实施例对此不再赘述。
67.需要说明的是,本说明书中的各个实施例均采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似的部分互相参见即可。
68.尽管已描述了本发明实施例的可选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括可选实施例以及落入本发明实施例范围的所有变更和修改。
69.最后,还需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体与另一个实体区分开来,而不一定要求或者暗示这些实体之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的物品或者终端设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种物品或者终端设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括要素的物品或者终端设备中还存在另外的相同要素。
70.以上对本发明所提供的技术方案进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,同时,对于本领域的一般技术人员,依据本发明的原理及实现方式,在具体实施方式及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1