一种适用临床的血管介入手术机器人双位驱动及反馈装置的制作方法
1.本发明涉及一种适用临床的血管介入手术机器人双位驱动及反馈装置,属于微创血管介入手术技术领域。
背景技术:
2.现有的血管介入手术机器人双位驱动及反馈装置多为只控制导丝、球囊、支架等部件的操作,而导引导管的送入需要医生进行手动完成,导引导管体外长距离送入目前存在结构冗余较多、结构复杂、体积大且笨重,无法在临床应用中得到很好地推广和使用。
技术实现要素:
3.(一)要解决的技术问题
4.为了解决现有技术的上述问题,本发明提供一种适用临床的血管介入手术机器人双位驱动及反馈装置,也就是说在机器人辅助状态下的微创血管介入手术中,手术床侧用于控制导管、导丝的双位驱动机构和位置反馈机构。
5.(二)技术方案
6.为了达到上述目的,本发明采用的主要技术方案包括:
7.本发明提供一种适用临床的血管介入手术机器人双位驱动及反馈装置,包括外壳以及设置在所述外壳内的双位驱动机构;所述双位驱动机构包括底板组件、同步带组件、远端驱动平台组件和近端驱动平台组件;所述同步带组件、所述远端驱动平台组件和所述近端驱动平台组件均设置在所述底板组件上;所述同步带组件的数量至少为两个,其中一个所述同步带组件与所述远端驱动平台组件连接,另一个所述同步带组件与所述近端驱动平台组件连接;还包括分别与所述远端驱动平台组件和所述近端驱动平台组件连接的远端位置反馈机构和近端位置反馈机构。
8.进一步地,所述底板组件包括机器人底板、导轨和张紧安装板;所述机器人底板安装在所述外壳内部,所述机器人底板上沿长度方向设置有导轨,所述机器人底板的一端上部设置有所述张紧安装板,所述张紧安装板用于连接所述同步带组件。
9.进一步地,所述底板组件还包括设置在所述机器人底板一侧的低扶手和高扶手;所述低扶手与小扶手的一端连接,所述小扶手的另一端与扶手套连接;所述高扶手与大扶手的一端连接,所述大扶手的另一端与所述扶手套连接。
10.进一步地,所述同步带组件包括从动同步带轮、同步带本体和主动同步带轮,所述从动同步带轮与所述主动同步带轮之间设置同步带本体,所述同步带本体的端部通过连接件连接;所述从动同步带轮通过轴承座与所述底板组件连接,所述主动同步带轮通过轴承座与所述底板组件连接;所述主动同步带轮与驱动器连接,以带动所述同步带本体转动。
11.进一步地,所述远端驱动平台组件包括远端支架连接架、远端延伸臂和远端卡槽;所述远端支架连接架与所述底板组件滑动连接,所述远端支架连接架与所述同步带组件固定连接;所述远端支架连接架与所述远端延伸臂的一端连接,所述远端延伸臂的另一端设
置有用于连接导管控制器的远端卡槽。
12.进一步地,所述近端驱动平台组件包括近端支架连接架、近端延伸臂和近端卡槽;所述近端支架连接架与所述底板组件滑动连接,所述近端支架连接架与所述同步带组件固定连接;所述近端支架连接架与所述近端延伸臂的一端连接,所述近端延伸臂的另一端设置有用于连接导丝控制器的近端卡槽。
13.进一步地,所述远端位置反馈机构包括远端坦克链拉片、远端坦克链压片、远端编码器拉片和远端拉线编码器,所述远端坦克链拉片设置在所述远端支架连接架一侧的所述底板组件上,所述远端坦克链压片设置在所述远端坦克链拉片的上端;所述远端编码器拉片设置在所述远端支架连接架另一侧的所述底板组件上,所述远端编码器拉片通过拉线与所述远端拉线编码器连接。
14.进一步地,所述近端位置反馈机构包括近端坦克链拉片、近端坦克链压片、近端编码器拉片和近端拉线编码器,所述近端坦克链拉片设置在所述近端支架连接架一侧的所述底板组件上,所述近端坦克链压片设置在所述近端坦克链拉片的上端;所述近端编码器拉片设置在所述近端支架连接架一侧的所述底板组件上,所述近端编码器拉片通过拉线与所述近端拉线编码器连接。
15.进一步地,所述外壳包括壳体、外侧板、装饰底座、装饰盖、前端盖和上盖板,所述壳体的两侧及后端分别与所述外侧板连接,所述前端盖和所述上盖板可拆卸地安装在所述壳体的顶部,所述装饰底座安装在所述上盖板的顶部后端,所述装饰盖安装在所述装饰底座的顶部后端。
16.进一步地,还包括限位机构,所述限位机构分别设置在所述底板组件的两端,以限制所述远端驱动平台组件和所述近端驱动平台组件的移动范围。
17.(三)有益效果
18.本发明的有益效果是:本发明提供的适用临床的血管介入手术机器人双位驱动及反馈装置,实现了导引导管的长距离送入和相匹配的导丝的长距离送入功能。同时该装置作为一种双位长距离输送执行平台,还可以通过更换远端驱动平台组件和近端驱动平台组件上的控制器,将管丝操作功能进一步延展,也可实现对球囊、支架、微导管、微导丝等其他血管介入手术通用器械的长距离递送和远程控制中的手术床侧的递送执行功能。本发明提供的装置解决了机器人辅助状态下的微创血管介入手术过程中导管、导丝的长距离递送和远程控制中的导管、导丝手术床侧的递送执行问题,术者可对配套导管或导丝末端形态进行遥控调整,快速准确地通过复杂解剖结构并到达病变部位,减少了器材使用量,缩短了手术时间,患者射线暴露时间及造影剂使用量也相应减少,术者可采取坐位对手术进行遥控操作。由于术者采取坐位对手术进行遥控操作,降低了体能消耗,有利于完成复杂手术操作,且基本无射线辐照。
附图说明
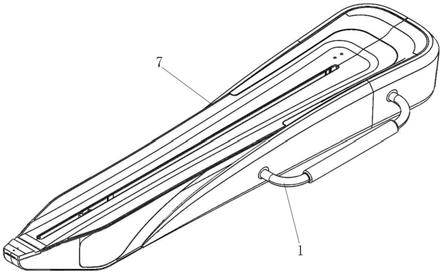
19.图1为本发明适用临床的血管介入手术机器人双位驱动及反馈装置的结构示意图;
20.图2为本发明壳体内部的结构示意图;
21.图3为本发明同步带组件的结构示意图;
22.图4为本发明远端驱动平台组件和远端位置反馈机构结构示意图;
23.图5为本发明近端驱动平台组件和近端位置反馈机构结构示意图;
24.图6为本发明外壳的结构示意图。
25.【附图标记说明】
26.1、底板组件;101、机器人底板;102、导轨;103、张紧安装板;104、低扶手;105、高扶手;106、大扶手;107、扶手套;108、小扶手;
27.2、同步带组件;201、第一轴承座;202、第一卡簧;203、第一轴承;204、第一转轴;205、从动同步带轮;206、同步带本体;207、主动同步带轮;208、第二轴承座;209、第二卡簧;210、第二轴承;211第二转轴;212、电机;213、上同步带压片;214、下同步带压片;
28.3、远端驱动平台组件;301、远端支架连接架;302、远端延伸臂;303、远端卡槽;
29.4、近端驱动平台组件;401、近端支架连接架;402、近端延伸臂;403、近端卡槽;
30.5、远端位置反馈机构;501、远端坦克链拉片;502:远端坦克链压片;503、远端编码器拉片;504、远端拉线编码器;
31.6、近端位置反馈机构;601、近端坦克链拉片;602:近端坦克链压片;603、近端编码器拉片;604、近端拉线编码器;
32.7、外壳;701、壳体;702、外侧板;703、装饰底座;704、装饰盖;705、前端盖;706、上盖板;
33.8、光电传感器。
具体实施方式
34.本发明的原理是利用电机和同步带组件带动导轨上的远端驱动平台组件和近端驱动平台组件进行直线往复运动,位置反馈由拉线编码器和限位传感器进行控制,该方案有效的解决了导管、导丝末端形态的遥控和调整。本发明从临床实际需求出发,总结血管介入手术标准术式和医生实际操作流程,将导管、导丝的递送原理模块化、流程化,通过本方案的单轨双模块机构设计,很好地解决了结构冗余较多、结构复杂、体积大且笨重的技术难题。通过本方案的外壳的设计,进一步解决了临床应用中的无菌隔绝的难题,使得该方案能够符合临床实际,为临床推广和应用奠定了基础。
35.为了更好的解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明作详细描述。
36.实施例1
37.如图1和图2所示,本发明提供一种适用临床的血管介入手术机器人双位驱动及反馈装置。该装置包括外壳7以及设置在外壳7内的双位驱动机构。其中,双位驱动机构包括底板组件1、同步带组件2、远端驱动平台组件3和近端驱动平台组件4。同步带组件2、远端驱动平台组件3和近端驱动平台组件4均设置在底板组件1上。同步带组件2的数量为两个,其中一个同步带组件2与远端驱动平台组件3连接,用于带动设置在远端驱动平台组件3上的导管控制器沿底板组件1长度方向移动;另一个同步带组件2与近端驱动平台组件4连接,用于带动设置在近端驱动平台组件4上的导丝控制器沿底板组件1长度方向移动。本发明还包括分别与远端驱动平台组件3和近端驱动平台组件4连接的远端位置反馈机构和近端位置反馈机构6;分别用于记录及反馈远端驱动平台组件3上的导管控制器和近端驱动平台组件4
上的导丝控制器的位置信息。本实施例的双位驱动机构为在机器人辅助状态下的微创血管介入手术中负责导管、导丝的长距离递送的驱动装置。
38.其中,参照图2,底板组件1包括机器人底板101、导轨102和张紧安装板103。机器人底板101固定安装在外壳7的壳体701内部,机器人底板101上方沿长度方向设置有导轨102。机器人底板101的一端上部设置有张紧安装板103,张紧安装板103用于张紧连接同步带组件2。具体地,导轨102安装在机器人底板101的中央;张紧安装板103安装在机器人底板101的前端,并用m5
×
15内六角螺栓与机器人底板101连接固定。
39.底板组件1还包括设置在机器人底板101一侧的低扶手104和高扶手105。低扶手104与小扶手108的一端连接,小扶手108的另一端与扶手套107连接。高扶手105与大扶手106的一端连接,大扶手106的另一端与扶手套107连接。具体地,低扶手104和高扶手105分别安装在机器人底板101左侧的安装孔位内,并用螺栓固定。大扶手106一端穿过设置在高扶手105上的通孔,并用螺母拧紧,另一端插入扶手套107内。小扶手108一端穿过设置在低扶手104上的通孔,并用螺母拧紧,另一端插入扶手套107内。上述结构形成一个紧密连接的整体,用于手术操作过程中,医生控制机器人姿态的手柄。
40.其中,参照图3,同步带组件2包括从动同步带轮205、同步带本体206和主动同步带轮207。从动同步带轮205与主动同步带轮207之间设置同步带本体206,同步带本体206的端部通过连接件连接。从动同步带轮205通过轴承座与底板组件1连接,主动同步带轮207通过轴承座与底板组件1连接。主动同步带轮207与驱动器连接,以带动同步带本体206转动。具体地,本实施例的驱动器为电机212。从动轮侧:第一转轴204穿过从动同步带轮205的中心孔,并且在从动同步带轮205两侧的第一转轴204上分别套有两个第一轴承203,两个第一轴承203分别安装在两个第一轴承座201的中心孔内。第一卡簧202卡接在第一轴承座201的内部卡槽里,以限制第一轴承203的位置。主动轮侧:第二转轴211穿过主动同步带轮207的中心孔,在主动同步带轮207两侧的第二转轴211上分别套有两个第二轴承210,两个第二轴承210安装在两个第二轴承座208的中心孔内。第二卡簧209卡接在第二轴承座208的内部卡槽里,以限制第二轴承210的位置。电机212的输出轴与第二转轴211连接,通过驱动第二转轴211转动,进而带动与之相连接的主动同步带轮207转动。通过同步带本体206将从动同步带轮205和主动同步带轮207进行连接。将同步带本体206调整好长度之后,剪裁,用连接件将同步带本体206的两端部进行连接。本实施例的连接件包括上同步带压片213和下同步带压片214,用上同步带压片213和下同步带压片214压紧同步带本体206的端部开口处,以将同步带本体206围绕在从动同步带轮205和主动同步带轮207之间。同时,上同步带压片213和下同步带压片214的组合体上预留有连接孔,用于连接远端驱动平台组件3和近端驱动平台组件4,以此来为远端驱动平台组件3上的导管控制器和近端驱动平台组件4上的导丝控制器提供动力。
41.其中,参照图4,远端驱动平台组件3包括远端支架连接架301、远端延伸臂302和远端卡槽303。远端支架连接架301与底板组件1滑动连接,远端支架连接架301与同步带组件2固定连接。远端支架连接架301与远端延伸臂302的一端连接,远端延伸臂302的另一端设置有用于连接导管控制器的远端卡槽303。具体地,远端支架连接架301为带滑块的安装板,为远端驱动平台组件3的其他连接件提供结构支撑。远端延伸臂302安装在远端支架连接架301上方。远端卡槽303用m2
×
20沉头螺钉固定在远端延伸臂302的一端中央,用于实现导管
控制器的快速安装和拆卸。
42.其中,远端位置反馈机构5包括远端坦克链拉片501、远端坦克链压片502、远端编码器拉片503和远端拉线编码器504。远端坦克链拉片501设置在远端支架连接架301一侧的底板组件1上,远端坦克链压片502设置在远端坦克链拉片501的上端。远端编码器拉片503设置在远端支架连接架301另一侧的底板组件1上,远端编码器拉片503通过拉线与远端拉线编码器504连接。远端拉线编码器504固定在底板组件1上,并与远端驱动平台组件3连接,用于检测远端驱动平台组件3的位移信息,并反馈给主端控制装置。远端拉线编码器504通过安装板与底板组件1的机器人底板101的后端固定连接。具体地,远端坦克链拉片501安装在远端支架连接架301的右侧的底板组件1上,远端坦克链压片502安装在远端坦克链拉片501的上端,方向向外。远端坦克链压片502用于引导坦克链。远端编码器拉片503安装在远端支架连接架301的左侧的底板组件1上,远端拉线编码器504的拉线安装在远端编码器拉片503上端的螺纹柱上,拉线与远端编码器拉片503同步移动。
43.其中,参照图5,近端驱动平台组件4包括近端支架连接架401、近端延伸臂402和近端卡槽403。近端支架连接架401与底板组件1滑动连接,近端支架连接架401与同步带组件2固定连接。近端支架连接架401与近端延伸臂402的一端连接,近端延伸臂402的另一端设置有用于连接导丝控制器的近端卡槽403。具体地,近端支架连接架401为带滑块的安装板,为近端驱动平台组件4的其他连接件提供结构支撑。近端延伸臂402安装在近端支架连接架401上方。近端卡槽403用m2
×
20沉头螺钉固定在近端延伸臂402的一端中央,用于实现导丝控制器的快速安装和拆卸。
44.其中,近端位置反馈机构6包括近端坦克链拉片601、近端坦克链压片602、近端编码器拉片603和近端拉线编码器604。近端坦克链拉片601设置在近端支架连接架401一侧的底板组件1上,近端坦克链压片602设置在近端坦克链拉片601的上端。近端编码器拉片603设置在近端支架连接架401一侧的底板组件1上,近端编码器拉片603通过拉线与近端拉线编码器604连接。近端拉线编码器604固定在底板组件1上,并与近端驱动平台组件4连接,用于检测近端驱动平台组件4的位移信息,并反馈给主端控制装置。近端拉线编码器604通过安装板与底板组件1的机器人底板101的后端固定连接。具体地,近端坦克链拉片601安装在近端支架连接架401的右侧的底板组件1上,近端坦克链压片602安装在近端坦克链拉片601的上端,方向向外。近端编码器拉片603安装在近端支架连接架401的右侧的底板组件1上。近端拉线编码器604的拉线安装在近端编码器拉片603上端的螺纹柱上,拉线与近端编码器拉片603同步移动。
45.其中,参照图6,外壳7包括壳体701、外侧板702、装饰底座703、装饰盖704、前端盖705和上盖板706。壳体701的两侧及后端分别与外侧板702连接,前端盖705和上盖板706可拆卸地安装在壳体701的顶部,装饰底座703安装在上盖板706的顶部后端,装饰盖704安装在装饰底座703的顶部后端。上盖板706的中间设置有用于安装导管控制器和导丝控制器的长条孔。具体地,壳体701作为外壳7的主要架构,双位驱动机构的机器人底板101安装在壳体701的内侧安装槽内,双位驱动机构的其他部件安装在机器人底板101上。外侧板702围在壳体701的左右两侧,通过螺纹连接和固定。装饰底座703、装饰盖704、前端盖705和上盖板706分别通过可拆卸卡槽卡在壳体701和外侧板702形成的框架内,形成上部密封表面。上述结构共同形成的外壳7在双位驱动机构周围形成密封表面,起到保护、支撑和无菌隔绝的作
用。
46.其中,本发明还包括限位机构,限位机构分别设置在底板组件1的两端,以限制远端驱动平台组件3和近端驱动平台组件4的移动范围。本实施例的限位机构为光电传感器8。
47.本发明的工作原理为:
48.近端驱动平台组件4和远端驱动平台组件3分别安装在底板组件1的导轨102上。两个同步带组件2均布在底板组件1的导轨102两侧,同步带组件2的上同步带压片213和下同步带压片214的组合体上预留有连接孔,分别用于与近端驱动平台组件4和远端驱动平台组件3的预留孔相连接,形成统一整体。可通过电机的驱动来实现近端驱动平台组件4和远端驱动平台组件3在导轨102上的往复移动。与近端驱动平台组件4和远端驱动平台组件3相连接的近端拉线编码器604和远端拉线编码器504,分别通过拉线的伸缩来实现对近端驱动平台组件4和远端驱动平台组件3的运行位置的实时位置记录和反馈。通过对近端驱动平台组件4和远端驱动平台组件3的控制和反馈,进而控制在该平台组件上的导管控制器(此处未体现,详见专利号:202123012593.8)、导丝控制器(此处未体现,详见专利号:202123013449.6),进而控制导管、导丝的驱动位置记录和反馈,以此来实现介入手术过程中对导管、导丝的远程递送和控制。
49.实施例2
50.本发明的双位驱动机构也可以在近端驱动平台组件和远端驱动平台组件上更换不同的驱动装置,进而可以实现微导管、球囊、支架等相关治疗组件的远距离递送的从端驱动。
51.以上所述,仅是本发明的较佳实施例而已,并非是对本发明做其它形式的限制,任何本领域技术人员可以利用上述公开的技术内容加以变更或改型为等同变化的等效实施例。但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1