一种安全有效的静脉输液装置系统
1.本发明涉及静脉输液技术领域,特别涉及一种安全有效的静脉输液装置系统。
背景技术:
2.前臂进行外周静脉输液这样可以增加留置时间,减少留置期间的疼痛,临床工作中,每个患者的血管情况差异大,前臂的血管相对手背会更深,有些患者的血管,我们稍微扎紧紧压脉带可以很好的触摸血管的弹性和走形;有些患者的血管,需要我们将压脉带紧实的捆绑在手臂上,观测到血管的情况。
3.然而,目前使用的输液装置主要为利用皮筋绑定的定点静脉注射,不具备通过手环定点后自动绑定拉紧的功能,不具备快速对血管进行全方位检测的功能,不具备快速解除绑定的触发结构。
技术实现要素:
4.有鉴于此,本发明提供一种安全有效的静脉输液装置系统,其具有插接头和限位件,提供了组合自锁的卡紧功能,能够将手环模组的位置进行自锁固定,实现对接通电。
5.本发明提供了一种安全有效的静脉输液装置系统,具体包括:床体,所述床体的主体为u形结构;转动臂托,所述转动臂托的数量设置为两组,两组转动臂托铰接设置在床体的两侧前中端;转动臂托的底部均固定设置有两组轮架;转动臂托的顶部外侧一体式设置有凸缘;纵移动架,所述纵移动架通过导轨滑动设置在凸缘的顶部;纵移动架的顶部滑动设置有横移架,横移架的一端铰接设置有血管红外仪,血管红外仪的铰接轴一端固定设置有蜗轮a;显示控制台,所述显示控制台固定设置在横移架的顶部;插接头,所述插接头固定设置在转动臂托的顶部;限位件,所述限位件固定设置在转动臂托的顶部中后侧;手环模组,所述手环模组的一端固定设置有插接口,插接口与插接头插接,插接口内设置有三相电极;触发座,所述触发座固定设置在床体的顶部后侧中间;转动臂托的顶部固定设置有垫片。
6.可选地,所述床体包括有:l形滑块,床体的两侧固定设置有l形滑块;凸块,床体的两侧固定设置有凸块,凸块的上下侧均固定设置有弹簧伸缩杆,弹簧伸缩杆的伸缩端均固定设置有自锁块。
7.可选地,所述转动臂托还包括有:连杆,转动臂托的前端边侧铰接设置有连杆,连杆的前端铰接设置有u形齿条件,u形齿条件的内侧为45
°
齿面,且u形齿条件滑动设置在l形滑块的内侧;丝杠a,凸缘的顶部旋转设置有丝杠a,凸缘的顶部后端固定设置有电机a,电机a与丝杠a传动连接。
8.可选地,所述纵移动架还包括有:丝杠b,横移架的底部旋转设置有丝杠b,丝杠b与纵移动架螺纹连接;电机b,纵移动架的外端固定设置有电机b,电机b与丝杠b设置锥齿轮传动连接;电机c,纵移动架的前侧固定设置有电机c,电机c转轴外固定设置有蜗杆a,蜗杆a与蜗轮a传动连接。
9.可选地,所述显示控制台包括有:输液架,显示控制台的顶部固定设置有输液架,
输液架为内部有倒锥形孔的环状结构;挂扣,显示控制台的内部设置有两列挂扣,两侧挂扣高度交错,两侧挂扣的开口背对。
10.可选地,所述限位件包括有:滑套,滑套的内部固定设置有弹簧杆a,滑套套设弹簧并穿过限位件固定设置有挡片;手环模组卡设在限位件和插接头之间。
11.可选地,所述手环模组还包括有:硅胶带,手环模组的一侧固定连接有硅胶带;收容轮,手环模组的内部旋转设置有收容轮,硅胶带的一端穿过手环模组固定在收容轮的外部;传动轴,手环模组的内部旋转设置有传动轴,传动轴与收容轮设置齿轮传动连接,传动轴的外部固定设置有蜗轮b;蜗杆b,手环模组的内部旋转设置有蜗杆b;电机d,手环模组的内部固定设置有电机d,电机d与蜗杆b传动连接,蜗杆b与蜗轮b传动连接。
12.可选地,所述触发座还包括有:应力板,触发座的两侧后方固定设置有应力板,应力板的前端固定设置有接近开关;踏板,踏板的后侧固定设置有弹簧杆b和触发杆,弹簧杆b套设弹簧并与应力板滑动连接;触发杆与接近开关对齐。
13.有益效果
14.根据本发明的各实施例的手环模组,提供了自动拼接和自动拉紧功能,手环模组卡设在插接头和限位件之间,完成对接安装,此时电机d接通控制电路,为电机d供电后,电机d带动蜗杆b旋转,蜗杆b带动蜗轮b、传动轴和收容轮旋转,将收容轮收拢拉紧,将血管绷起,即可方便进行注射,压力通过显示控制台设定,在绑紧3分钟的时候,电机d自动反转将硅胶带放松,控制方便能够完成自然束缚,手环模组还可以单独使用,将科室、床号、住院号、姓名、性别、二维码打印为贴纸粘贴在手环模组的外部,可以作为正常手环使用。
15.此外,纵移动架的设置,提供了双轴全方位旋转功能,观测血管的时候,根据需要启动电机a带动丝杠a旋转,利用螺纹传动推动纵移动架移动,可以调整纵向观察位置,启动电机b带动丝杠b旋转,通过螺纹传动推动横移架横向移动,可以调整横向观察位置,蜗杆a与蜗轮a传动连接,通过蜗轮蜗杆传动能够实现对血管红外仪的角度调节,利用血管红外仪可以直接对血管进行观察测算血管的位置和直径。
16.此外,触发座的设置,提供了触发效果,需要提前放松的时候,踩踏踏板,将踏板向后推进,利用触发杆接触接近开关,使电机d反转,将硅胶带放松,接触对人体肢体部位的束缚效果。
附图说明
17.为了更清楚地说明本发明的实施例的技术方案,下面将对实施例的附图作简单地介绍。
18.下面描述中的附图仅仅涉及本发明的一些实施例,而非对本发明的限制。
19.在附图中:
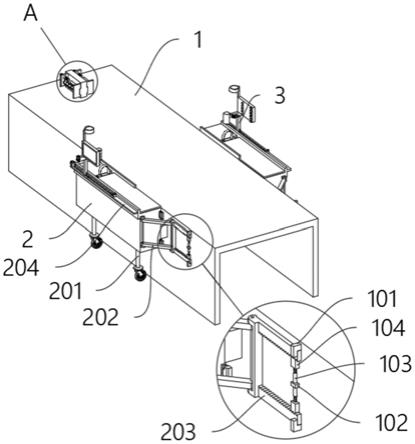
20.图1示出了根据本发明的实施例的立体前视结构示意图;
21.图2示出了根据本发明的实施例的立体后视结构示意图;
22.图3示出了根据本发明的实施例转动臂托的立体结构示意图;
23.图4示出了根据本发明的实施例显示控制台的立体结构示意图;
24.图5示出了根据本发明的实施例纵移动架的立体结构示意图;
25.图6示出了根据本发明的实施例手环模组的传动结构示意图;
26.图7示出了根据本发明的实施例的a局部放大结构示意图;
27.图8示出了根据本发明的实施例的b局部放大结构示意图;
28.图9示出了根据本发明的实施例的控制系统流程结构示意图。
29.附图标记列表
30.1、床体;101、l形滑块;102、凸块;103、弹簧伸缩杆;104、自锁块;2、转动臂托;201、轮架;202、连杆;203、u形齿条件;204、凸缘;205、丝杠a;206、电机a;3、纵移动架;301、横移架;302、丝杠b;303、电机b;304、电机c;305、蜗杆a;4、血管红外仪;401、蜗轮a;5、显示控制台;501、输液架;502、挂扣;6、插接头;7、限位件;701、滑套;702、弹簧杆a;8、手环模组;801、插接口;802、硅胶带;803、收容轮;804、传动轴;805、蜗轮b;806、蜗杆b;807、电机d;9、触发座;901、应力板;902、接近开关;903、踏板;904、弹簧杆b;905、触发杆;10、垫片。
具体实施方式
31.为了使得本发明的技术方案的目的、方案和优点更加清楚,下文中将结合本发明的具体实施例的附图,对本发明实施例的技术方案进行清楚、完整的描述。除非另有说明,否则本文所使用的术语具有本领域通常的含义。附图中相同的附图标记代表相同的部件。
32.实施例:请参考图1至图9:
33.本发明提出了一种安全有效的静脉输液装置系统,包括:床体1,床体1的主体为u形结构;转动臂托2,转动臂托2的数量设置为两组,两组转动臂托2铰接设置在床体1的两侧前中端;转动臂托2的底部均固定设置有两组轮架201;转动臂托2的顶部外侧一体式设置有凸缘204;纵移动架3,纵移动架3通过导轨滑动设置在凸缘204的顶部;纵移动架3的顶部滑动设置有横移架301,横移架301的一端铰接设置有血管红外仪4,血管红外仪4的铰接轴一端固定设置有蜗轮a401;显示控制台5,显示控制台5固定设置在横移架301的顶部;插接头6,插接头6固定设置在转动臂托2的顶部;限位件7,限位件7固定设置在转动臂托2的顶部中后侧;手环模组8,手环模组8的一端固定设置有插接口801,插接口801与插接头6插接,插接口801内设置有三相电极;触发座9,触发座9固定设置在床体1的顶部后侧中间;转动臂托2的顶部固定设置有垫片10。
34.此外,根据本发明的实施例,参考图1,床体1包括有:l形滑块101,床体1的两侧固定设置有l形滑块101;凸块102,床体1的两侧固定设置有凸块102,凸块102的上下侧均固定设置有弹簧伸缩杆103,弹簧伸缩杆103的伸缩端均固定设置有自锁块104,能够为转动臂托2提供自锁功能。
35.此外,根据本发明的实施例,参考图1,转动臂托2还包括有:连杆202,转动臂托2的前端边侧铰接设置有连杆202,连杆202的前端铰接设置有u形齿条件203,u形齿条件203的内侧为45
°
齿面,且u形齿条件203滑动设置在l形滑块101的内侧,自锁块104与u形齿条件203吻合接触;丝杠a205,凸缘204的顶部旋转设置有丝杠a205,凸缘204的顶部后端固定设置有电机a206,电机a206与丝杠a205传动连接,为纵移动架3的移动提供了传动效果。
36.此外,根据本发明的实施例,参考图4-5,纵移动架3还包括有:丝杠b302,横移架301的底部旋转设置有丝杠b302,丝杠b302与纵移动架3螺纹连接;电机b303,纵移动架3的外端固定设置有电机b303,电机b303与丝杠b302设置锥齿轮传动连接;电机c304,纵移动架3的前侧固定设置有电机c304,电机c304转轴外固定设置有蜗杆a305,蜗杆a305与蜗轮a401
传动连接,通过蜗轮蜗杆传动能够实现对血管红外仪4的角度调节。
37.此外,根据本发明的实施例,参考图4,显示控制台5包括有:输液架501,显示控制台5的顶部固定设置有输液架501,输液架501为内部有倒锥形孔的环状结构;挂扣502,显示控制台5的内部设置有两列挂扣502,两侧挂扣502高度交错,两侧挂扣502的开口背对,可以用于挂设输液管,并保持输液管的流动方向朝下。
38.此外,根据本发明的实施例,参考图8,限位件7包括有:滑套701,滑套701的内部固定设置有弹簧杆a702,滑套701套设弹簧并穿过限位件7固定设置有挡片;手环模组8卡设在限位件7和插接头6之间,实现了自锁手环模组8的效果。
39.此外,根据本发明的实施例,参考图6,手环模组8还包括有:硅胶带802,手环模组8的一侧固定连接有硅胶带802;收容轮803,手环模组8的内部旋转设置有收容轮803,硅胶带802的一端穿过手环模组8固定在收容轮803的外部;传动轴804,手环模组8的内部旋转设置有传动轴804,传动轴804与收容轮803设置齿轮传动连接,传动轴804的外部固定设置有蜗轮b805;蜗杆b806,手环模组8的内部旋转设置有蜗杆b806;电机d807,手环模组8的内部固定设置有电机d807,电机d807与蜗杆b806传动连接,蜗杆b806与蜗轮b805传动连接,提供了自动收容的功能。
40.此外,根据本发明的实施例,参考图7,触发座9还包括有:应力板901,触发座9的两侧后方固定设置有应力板901,应力板901的前端固定设置有接近开关902;踏板903,踏板903的后侧固定设置有弹簧杆b904和触发杆905,弹簧杆b904套设弹簧并与应力板901滑动连接;触发杆905与接近开关902对齐,触发杆905与接近开关902接触时,电机d807反转。
41.本实施例的具体使用方式与作用:本发明中,使用时,患者首先持续佩戴手环模组8,并将科室、床号、住院号、姓名、性别、二维码打印为贴纸粘贴在手环模组8的外部;打针时,患者自己躺在床体1的顶部将手臂放置在转动臂托2的顶部,将手环模组8卡设在插接头6和限位件7之间,完成对接安装,此时电机d807接通控制电路。
42.为电机d807供电后,电机d807带动蜗杆b806旋转,蜗杆b806带动蜗轮b805、传动轴804和收容轮803旋转,将收容轮803收拢拉紧,将血管绷起,即可方便进行注射,压力通过显示控制台5设定,且设置定时,在绑紧3分钟的时候,电机d807自动反转将硅胶带802放松。
43.需要提前放松的时候,踩踏踏板903,将踏板903向后推进,利用触发杆905接触接近开关902,使电机d807反转,将硅胶带802放松,接触对人体肢体部位的束缚效果。
44.观测血管的时候,根据需要启动电机a206带动丝杠a205旋转,利用螺纹传动推动纵移动架3移动,可以调整纵向观察位置,启动电机b303带动丝杠b302旋转,通过螺纹传动推动横移架301横向移动,可以调整横向观察位置,蜗杆a305与蜗轮a401传动连接,通过蜗轮蜗杆传动能够实现对血管红外仪4的角度调节,利用血管红外仪4可以直接对血管进行观察测算血管的位置和直径。
45.最后,需要说明的是,本发明在描述各个构件的位置及其之间的配合关系等时,通常会以一个/一对构件举例而言,然而本领域技术人员应该理解的是,这样的位置、配合关系等,同样适用于其他构件/其他成对的构件。
46.以上所述仅是本发明的示范性实施方式,而非用于限制本发明的保护范围,本发明的保护范围由所附的权利要求确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1