用于腔镜手术机器人的术中远程操作终端交互系统及方法与流程
1.本发明涉及腔镜手术医疗机器人技术领域,具体而言,涉及一种用于腔镜手术机器人的术中远程操作终端交互系统及方法。
背景技术:
2.腔镜微创手术机器人是现代医疗技术和机器人技术相结合发展的产物,相比于传统的腹腔镜手术来讲,机器人手术最大的优势在于能够在狭小的空间进行缝合或打结,更加有利于医生的精细化操作。
3.现有医疗现状下患者与医生均在同一现场是实施手术的先决条件,而该条件限制了许多偏远地区及特殊情况下由于交通不便的患者,使其无法得到最佳的治疗机会,因此如何提供普及的优质医疗服务,成为了目前医疗升级的重点。
技术实现要素:
4.本发明解决的问题是如何实现远程手术以提供普及的优质医疗服务。
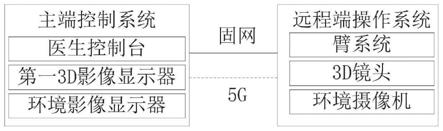
5.为解决上述问题,本发明提供一种用于腔镜手术机器人的术中远程操作终端交互系统,包括主端控制系统和远程端操作系统,所述主端控制系统和所述远程端操作系统之间通过固网和/或5g网络通信连接;所述远程端操作系统包括臂系统、3d镜头和环境摄像机,所述3d镜头通过所述臂系统设置于手术床上方,所述3d镜头用于实时采集术中患者病灶图像信息,所述环境摄像机用于实时采集术中环境现场视频信息;所述主端控制系统包括医生控制台、第一3d影像显示器和环境影像显示器,所述医生控制台用于供远程操作医生进行远程操作,所述第一3d影像显示器用于实时接收并显示所述术中患者病灶图像信息,所述环境影像显示器用于实时接收并显示所述术中环境现场视频信息。
6.本发明所述的用于腔镜手术机器人的术中远程操作终端交互系统,基于固网和5g通讯技术实现“一中心-多地区”远程协作手术,实时传输术中患者病灶图像和术中患者环境现场,有利于远程参与者给出更好的手术策略,弥补传统意义上偏远地区医疗技术水平落后的缺陷,提供普及的优质医疗服务。
7.可选地,所述主端控制系统还包括声音设备,所述远程端操作系统还包括全向麦克风和收音台,所述声音设备、所述全向麦克风和所述收音台用于实现所述远程操作医生与术中辅助医生的语音互动。
8.本发明所述的用于腔镜手术机器人的术中远程操作终端交互系统,通过设置声音设备、全向麦克风和收音台实现远程操作医生与术中辅助医生的语音互动,提高远程操作医生与术中辅助医生的沟通效率。
9.可选地,所述主端控制系统还包括第一矩阵控制器,所述远程端操作系统还包括第二矩阵控制器,所述第一矩阵控制器和所述第二矩阵控制器用于实现所述远程操作医生与术中辅助医生的手术策略分析互动和文件分享。
10.本发明所述的用于腔镜手术机器人的术中远程操作终端交互系统,通过设置第一
矩阵控制器和所述第二矩阵控制器实现远程操作医生与术中辅助医生的手术策略分析互动和文件分享,提高远程操作医生的工作效率。
11.可选地,所述主端控制系统还包括主控台摄像头,所述主控台摄像头用于实时采集所述远程操作医生的操作视频信息。
12.本发明所述的用于腔镜手术机器人的术中远程操作终端交互系统,通过设置主控台摄像头实时采集远程操作医生的操作视频信息,采集的视频可以存储以供后续教学、学习,也可以用于后期复盘。
13.可选地,所述远程端操作系统还包括3d镜头光源盒、3d影像处理器和第二3d影像显示器,所述3d镜头光源盒用于为所述3d镜头提供光源,所述3d影像处理器用于处理所述3d镜头实时采集的术中患者病灶图像信息并发送至所述第二3d影像显示器,所述第二3d影像显示器用于实时接收并显示所述术中患者病灶图像信息。
14.本发明所述的用于腔镜手术机器人的术中远程操作终端交互系统,通过设置远程端操作系统包括3d镜头光源盒、3d影像处理器和第二3d影像显示器,有利于实现3d镜头的图像信息采集。
15.可选地,所述用于腔镜手术机器人的术中远程操作终端交互系统还包括网监装置,所述网监装置用于实时监控所述主端控制系统和所述远程端操作系统的信息交互。
16.本发明所述的用于腔镜手术机器人的术中远程操作终端交互系统,通过设置网监装置实时监控主端控制系统和远程端操作系统的信息交互,可在交互过程出现错误时快速找到错误原因并解决,保证术中远程操作的安全可靠。
17.可选地,所述用于腔镜手术机器人的术中远程操作终端交互系统还包括主分布式数据交互装置、网络中控交换机和从分布式数据交互装置,所述主分布式数据交互装置用于所述主端控制系统输出信息的处理和信号缩放,所述网络中控交换机用于局域网内部的ip地址和网卡的mac信息的转换,所述从分布式数据交互装置用于所述远程端操作系统输出信息的处理、信号缩放和视频解码处理。
18.本发明所述的用于腔镜手术机器人的术中远程操作终端交互系统,通过设置术中远程操作终端交互系统还包括主分布式数据交互装置、网络中控交换机和从分布式数据交互装置,有利于实现主端控制系统和远程端操作系统的信息交互。
19.可选地,所述主分布式数据交互装置包括音频接口、hdmi输出接口、485/io控制接口、usb接口和dc接口。
20.本发明所述的用于腔镜手术机器人的术中远程操作终端交互系统,通过设置主分布式数据交互装置包括音频接口、hdmi输出接口、485/io控制接口、usb接口和dc接口,有利于实现主端控制系统和远程端操作系统的信息交互。
21.可选地,所述从分布式数据交互装置包括音频接口、hdmi输出接口、485/io控制接口、usb接口、dc接口和网口。
22.本发明所述的用于腔镜手术机器人的术中远程操作终端交互系统,通过设置从分布式数据交互装置包括音频接口、hdmi输出接口、485/io控制接口、usb接口、dc接口和网口,有利于实现主端控制系统和远程端操作系统的信息交互。
23.本发明还提供一种用于腔镜手术机器人的术中远程操作终端交互方法,应用于上述用于腔镜手术机器人的术中远程操作终端交互系统,包括:主端控制系统向远程端操作
系统发送共享申请;所述远程端操作系统实时向所述主端控制系统发送视频和音频信息;所述主端控制系统向所述远程端操作系统发送远程交互申请;所述远程端操作系统实时接收所述主端控制系统的视频和音频信息;所述主端控制系统向所述远程端操作系统发送远程术中操作申请。本发明所述的用于腔镜手术机器人的术中远程操作终端交互方法与上述用于腔镜手术机器人的术中远程操作终端交互系统相对于现有技术所具有的优势相同,在此不再赘述。
附图说明
24.图1为本发明实施例的用于腔镜手术机器人的术中远程操作终端交互系统的示意图;
25.图2为本发明实施例的主端控制系统的示意图;
26.图3为本发明实施例的远程端操作系统的示意图;
27.图4为本发明实施例的用于腔镜手术机器人的术中远程操作终端交互系统的拓扑结构;
28.图5为本发明实施例的术中远程会诊交互流程。
具体实施方式
29.为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
30.如图1所示,本发明实施例提供一种用于腔镜手术机器人的术中远程操作终端交互系统,包括主端控制系统和远程端操作系统,所述主端控制系统和所述远程端操作系统之间通过固网和/或5g网络通信连接;所述远程端操作系统包括臂系统、3d镜头和环境摄像机,所述3d镜头通过所述臂系统设置于手术床上方,所述3d镜头用于实时采集术中患者病灶图像信息,所述环境摄像机用于实时采集术中环境现场视频信息;所述主端控制系统包括医生控制台、第一3d影像显示器和环境影像显示器,所述医生控制台用于供远程操作医生进行远程操作,所述第一3d影像显示器用于实时接收并显示所述术中患者病灶图像信息,所述环境影像显示器用于实时接收并显示所述术中环境现场视频信息。
31.具体地,在本实施例中,用于腔镜手术机器人的术中远程操作终端交互系统包括主端控制系统和远程端操作系统,主端控制系统可进行主端控制系统信息的采集处理和远程端操作系统信息的接收处理,远程端操作系统可进行远程端操作系统信息的采集处理和主端控制系统信息的接收处理,采用多点控制单元,进行点对点的信息交互,主端控制系统与远程端操作系统通过固网+5g双保险式信息传输,基于“固网+5g”通讯技术,可实现“一中心-多地区”远程协作手术,弥补传统意义上偏远地区医疗技术水平落后的缺陷。医生在术前准备工作完成后,主端控制系统通过ip向远程端操作系统发送邀请,远程端操作系统接受邀请后,主端控制系统可实时接收远程端操作系统发送的视频和音频信息,观察患者术中病灶图像和术中环境现场图像。术中远程操作系统与腔镜手术操作相结合,为患者、医生和专家提供了一个良好的沟通平台。
32.结合图2所示,主端控制系统包括医生控制台、3d影像显示器和环境影像显示器,医生控制台可供术中远程操作专家进行术中远程操作;3d影像显示器实时接收术中患者病
灶图像信息,环境影像显示器连接在医生控制台扶手左侧,可在扶手上滑动,且自身能进行旋转,实时接收术中环境现场视频信息。
33.结合图3所示,远程端操作系统包括臂系统、3d镜头和环境摄像机,3d镜头通过臂系统设置于手术床上方,3d镜头实时采集术中患者病灶图像信息,环境摄像机实时采集术中环境现场视频信息。实时传输术中患者病灶图像和术中患者环境现场,有利于远程参与者给出更好的手术策略,实现专家到术中现场的亲临感,为医疗落后的地区提供更优的术中方案。
34.其中,结合图4所示,术中远程操作终端交互系统采用点对点的通讯方式,系统拓扑结构为星型,系统架构简单,实现主操作端和远程参与者之间直接进行信息交流,保证术中信息交流的快速性和安全性。
35.在本实施例中,基于固网和5g通讯技术实现“一中心-多地区”远程协作手术,实时传输术中患者病灶图像和术中患者环境现场,有利于远程参与者给出更好的手术策略,弥补传统意义上偏远地区医疗技术水平落后的缺陷,提供普及的优质医疗服务。
36.可选地,所述主端控制系统还包括声音设备,所述远程端操作系统还包括全向麦克风和收音台,所述声音设备、所述全向麦克风和所述收音台用于实现所述远程操作医生与术中辅助医生的语音互动。
37.具体地,在本实施例中,手术专家(远程操作医生)可以根据主端控制系统接收到的患者术中信息与术中辅助医生通过音频进行交流,共同完成手术。声音设备通常设置在医生控制台扶手上方、3d影像显示器下方,以便于收音。全向麦克风和收音台通常设置在移动台车上,根据实际需要将移动台车移动到预设位置,以选择合适的收音位置。
38.在本实施例中,通过设置声音设备、全向麦克风和收音台实现远程操作医生与术中辅助医生的语音互动,提高远程操作医生与术中辅助医生的沟通效率。
39.可选地,所述主端控制系统还包括第一矩阵控制器,所述远程端操作系统还包括第二矩阵控制器,所述第一矩阵控制器和所述第二矩阵控制器用于实现所述远程操作医生与术中辅助医生的手术策略分析互动和文件分享。
40.具体地,在本实施例中,结合图2所示,主端控制系统包括第一矩阵控制器(也称大屏控制器),第一矩阵控制器通常设置在3d影像显示器上方,以便于远程操作医生在观察患者病灶图像信息的同时,与术中辅助医生进行手术策略分析互动和文件分享,以提高远程操作医生的工作效率。结合图3所示,远程端操作系统包括第二矩阵控制器,第二矩阵控制器通常设置在移动台车最上方,并可与移动台车共同移动,以供术中辅助医生选择合适的放置地点。
41.在本实施例中,通过设置第一矩阵控制器和所述第二矩阵控制器实现远程操作医生与术中辅助医生的手术策略分析互动和文件分享,提高远程操作医生的工作效率。
42.可选地,所述主端控制系统还包括主控台摄像头,所述主控台摄像头用于实时采集所述远程操作医生的操作视频信息。
43.具体地,在本实施例中,结合图2所示,主端控制系统还包括主控台摄像头,主控台摄像头(主控台相机)通常设置在3d影像显示器和第一矩阵控制器之间,以便实时采集远程操作医生的操作视频信息,采集的视频可以存储以供后续教学、学习,也可以用于后期复盘。
44.在本实施例中,通过设置主控台摄像头实时采集远程操作医生的操作视频信息,采集的视频可以存储以供后续教学、学习,也可以用于后期复盘。
45.可选地,所述远程端操作系统还包括3d镜头光源盒、3d影像处理器和第二3d影像显示器,所述3d镜头光源盒用于为所述3d镜头提供光源,所述3d影像处理器用于处理所述3d镜头实时采集的术中患者病灶图像信息并发送至所述第二3d影像显示器,所述第二3d影像显示器用于实时接收并显示所述术中患者病灶图像信息。
46.具体地,在本实施例中,结合图3所示,远程端操作系统还包括3d镜头光源盒、3d影像处理器和第二3d影像显示器,3d镜头光源盒、3d影像处理器和第二3d影像显示器通常设置在移动台车上,第二3d影像显示器可以由支臂引出设置在一旁。3d镜头光源盒为3d镜头提供光源,3d影像处理器处理3d镜头实时采集的术中患者病灶图像信息并发送至第二3d影像显示器,第二3d影像显示器实时接收并显示术中患者病灶图像信息,对应的术中患者病灶图像信息也会传输到第一3d影像显示器上。
47.在本实施例中,通过设置远程端操作系统包括3d镜头光源盒、3d影像处理器和第二3d影像显示器,有利于实现3d镜头的图像信息采集。
48.可选地,所述用于腔镜手术机器人的术中远程操作终端交互系统还包括网监装置,所述网监装置用于实时监控所述主端控制系统和所述远程端操作系统的信息交互。
49.具体地,在本实施例中,结合图4所示,术中远程操作终端交互系统还包括网监装置,网监装置可检测主端控制系统和远程端操作系统信息交互的准确性和安全性,在交互过程中出现错误,可快速找到错误原因并解决,保证术中远程操作的安全可靠。
50.在本实施例中,通过设置网监装置实时监控主端控制系统和远程端操作系统的信息交互,可在交互过程出现错误时快速找到错误原因并解决,保证术中远程操作的安全可靠。
51.可选地,所述用于腔镜手术机器人的术中远程操作终端交互系统还包括主分布式数据交互装置、网络中控交换机和从分布式数据交互装置,所述主分布式数据交互装置用于所述主端控制系统输出信息的处理和信号缩放,所述网络中控交换机用于局域网内部的ip地址和网卡的mac信息的转换,所述从分布式数据交互装置用于所述远程端操作系统输出信息的处理、信号缩放和视频解码处理。
52.具体地,在本实施例中,结合图4所示,术中远程操作终端交互系统还包括主分布式数据交互装置、网络中控交换机和从分布式数据交互装置,主分布式数据交互装置可进行主端控制系统输出信息的处理和信号缩放,网络中控交换机可实现局域网内部的ip地址和网卡的mac信息转换,从分布式数据交互装置可进行远程端操作系统输出信息的处理、信号缩放和视频解码处理。
53.在本实施例中,通过设置术中远程操作终端交互系统还包括主分布式数据交互装置、网络中控交换机和从分布式数据交互装置,有利于实现主端控制系统和远程端操作系统的信息交互。
54.可选地,所述主分布式数据交互装置包括音频接口、hdmi输出接口、485/io控制接口、usb接口和dc接口。
55.具体地,在本实施例中,主分布式数据交互装置包括音频接口、hdmi输出接口、485/io控制接口、usb接口和dc接口,有利于实现主端控制系统和远程端操作系统的信息交
互。
56.在本实施例中,通过设置主分布式数据交互装置包括音频接口、hdmi输出接口、485/io控制接口、usb接口和dc接口,有利于实现主端控制系统和远程端操作系统的信息交互。
57.可选地,所述从分布式数据交互装置包括音频接口、hdmi输出接口、485/io控制接口、usb接口、dc接口和网口。
58.具体地,在本实施例中,从分布式数据交互装置包括音频接口、hdmi输出接口、485/io控制接口、usb接口、dc接口和网口,有利于实现主端控制系统和远程端操作系统的信息交互。
59.在本实施例中,通过设置从分布式数据交互装置包括音频接口、hdmi输出接口、485/io控制接口、usb接口、dc接口和网口,有利于实现主端控制系统和远程端操作系统的信息交互。
60.本发明另一实施例还提供一种用于腔镜手术机器人的术中远程操作终端交互方法,应用于上述用于腔镜手术机器人的术中远程操作终端交互系统,包括:主端控制系统向远程端操作系统发送共享申请;所述远程端操作系统实时向所述主端控制系统发送视频和音频信息;所述主端控制系统向所述远程端操作系统发送远程交互申请;所述远程端操作系统实时接收所述主端控制系统的视频和音频信息;所述主端控制系统向所述远程端操作系统发送远程术中操作申请。
61.具体地,在本实施例中,结合图5所示,手术具体流程包括:
62.step1:腔镜手术设备运行;
63.step2:准备术前工作,检查术中规划器械和医用物品是否具备,手术设备是否正常运行;
64.step3:术中主端控制系统通过ip向远程端操作系统发送术中会诊视频、音频共享申请;
65.step4:远程端操作系统收到主端控制系统的申请后,检查系统自身是否正常运行并接受申请,实时向主端控制系统发送视频、音频信息;
66.step5:主端控制系统实时接收术中患者病灶视频、术中患者手术场景视频、术中环境场景音频信息;
67.step6:待主端控制系统确认自身能够准确接收上述信息时,主端控制系统向远程端操作系统发送远程交互申请;
68.step7:远程端操作系统同意申请后,接收主端控制系统实时视频和音频信息;
69.step8:待主端控制系统确认信息共享无误后,主端控制系统向远程端操作系统发送远程术中操作申请;
70.step9:待远程端操作系统确认信息共享无误后,同意主端控制系统发送的术中远程操作申请;
71.step10:术中操作专家与术中辅助医生建立术中远程操作实时交流;
72.step11:手术完成,术中远程操作结束。
73.虽然本发明公开披露如上,但本发明公开的保护范围并非仅限于此。本领域技术人员在不脱离本发明公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修
改均将落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1