一种穿戴式柔性下肢助力外骨骼控制系统
1.本发明涉及外骨骼机器人技术领域,尤其涉及一种穿戴式柔性下肢助力外骨骼控制系统。
背景技术:
2.统计数据显示,我国目前60岁以上的老龄人口超过2亿,并且预计将在2035年增长至4亿。同时,由脑卒中、脊髓损伤或脑外伤等原因造成的残障人口数量迅速增长,我国肢体残疾人口逾2400万,每年新增脑卒中患者约200万。医学期刊在2019年的报道显示,由脑卒中引起的daly指数排名从1990年的第3位攀升至2017年的第1位,死亡率已逾15.8%,脑卒中疾病已成为影响国内人口寿命与生活质量的头号杀手。由脑卒中引起的残障群体和老年人群普遍存在下肢运动障碍问题,如非对称步态、踝关节跖背屈能力减弱和膝关节稳定性降低等,这些已经严重影响到他们的日常生活。因此,亟需下肢外骨骼机器人来辅助他们步行。
3.传统的刚性下肢外骨骼机器人通常采用大量刚性连杆或金属刚性结构,虽可为下肢提供支撑和保护且达到一定的康复效果,但仍存在体积大、重量大、柔顺性差和便携性差等问题。患者穿戴时,刚性下肢外骨骼可能会对皮下软体组织挤压而产生剪切力。当刚性下肢外骨骼无法完全随人体下肢运动时,这个剪切力会产生高达1.46nm的非期望力矩。因此,对于残留部分下肢运动能力的患者和老年人群,刚性下肢外骨骼的辅助不仅收效甚微,还可能因人机耦合系统的动态特性反而阻碍人体步行。
4.柔性下肢外骨骼机器人作为新兴的外骨骼机器人技术,集成了柔性驱动和可穿戴机构,有效解决了传统的刚性下肢外骨骼系统笨重、顺应性差、便携性差以及穿戴舒适性差等诸多问题,已成为主动康复领域发展的重要方向之一。柔性下肢外骨骼不仅对于仍残留部分步行功能的偏瘫患者、行动不便的老年人群有良好的步行辅助效果,同时也具有极高的理论研究价值。
5.因此,本领域的技术人员致力于提供一种穿戴式柔性下肢助力外骨骼控制系统,为穿戴者提供髋关节屈曲和伸展力/矩以辅助步行,增强穿戴者日常行走的稳定性、安全性及舒适性。
技术实现要素:
6.有鉴于现有技术上的缺陷,本发明所要解决的技术问题是如何提供一种穿戴式柔性下肢助力外骨骼控制系统。
7.为实现上述目的,本发明提供了一种穿戴式柔性下肢助力外骨骼控制系统,所述柔性下肢助力外骨骼包括柔性服、弹性驱动装置、鲍登线驱动装置、驱动控制装置、柔性绑缚装置、传感系统,其特征在于,所述控制系统包括第一控制器、第二控制器、第三控制器,所述第一控制器被配置为识别检测下肢运动意图、估计步态相位状态,所述第二控制器被配置为将下肢运动意图转换为所述第三控制器的期望轨迹、实现人机力交互协同控制,所
述第三控制器被配置为对所述第二控制器的期望轨迹进行精确跟踪。
8.本发明中,各控制器各司其职、互不干涉并协同控制柔性下肢助力外骨骼快速跟踪响应控制指令。
9.进一步地,所述传感系统包括分别设置于大腿两侧和背部的角度传感器、设置于所述弹性驱动装置的第一拉力传感器、与所述鲍登线驱动装置和所述柔性绑缚装置连接的第二拉力传感器、足底压力鞋垫。
10.上述方案中,各传感器为控制系统提供稳定、有效的物理信号,并用于人体的运动意图识别与运动状态估计。
11.传感系统通过各传感器测量的机械信号,基于人机环境耦合下多传感信息进行融合分析,识别人体的运动意图,把一个完整的步态周期离散化,在每个离散化区间内设置控制参数,并经由第一控制器中的模糊神经网络输出期望步态相位,由第二控制器生成期望轨迹及低级控制器跟踪轨迹,从而实现在不同的步态周期下协同力的交互控制。
12.进一步地,所述第一控制器采用模糊神经网络对多模态信息融合的步态数据进行训练、学习及步态规划,提升下肢运动意图识别检测与步态相位状态估计的精度和可靠性,所述第一控制器的算法包括以下步骤:
13.设定期望步态相位点pd(t);
14.在设定范围内选取适当的控制参数k进行预实验,采集步行中的足底压力f
sole
(t)、髋关节角度q(t);
15.设定期望偏差ef、eq,再计算指标偏差fe、qe作为模型输入,以控制参数k作为模型输出,进行模糊神经网络训练;
16.如果期望步态相位点发生变化,则重复上述过程,反之,则完成模型训练。
17.进一步地,所述第二控制器采用自适应阻抗控制策略实现人机力交互协同控制,降低柔性下肢助力外骨骼与人体在步态周期中的人机交互力;所述下肢助力外骨骼在步态周期中关节空间的阻抗模型为:
[0018][0019]
式中,mk(t)是自适应惯性系数,bk(t)是自适应阻尼系数,kk(t)是自适应刚度系数,qd(t)是髋关节期望角度,q(t)是髋关节实际角度,f(t)是输出的人机交互力。
[0020]
第二控制器的作用是融合人体运动状态与助力策略,并将用户的运动意图,即髋关节轨迹生成器输出的期望角度信息转化为第三控制器所需的交互力轨迹。
[0021]
进一步地,为了构建自适应参数学习率,将人机交互力偏差和髋关节角度误差作为代价函数,具体计算公式为:
[0022][0023]eq
(t)=qd(t)-q(t),
[0024]ef
(t)=fd(t)-f(t),
[0025]
式中,f(t)是代价函数,eq(t)是髋关节角度误差,ef(s)是eq(t)经过拉普拉斯变换得到的频域函数,ef(t)是人机交互力偏差,fd(t)是人机交互期望力。
[0026]
进一步地,采用梯度下降法改变bd(t)和kd(t),使得λ(t)不断减小,得到自适应参数学习率为:
[0027][0028][0029]
式中,k为迭代次数,α为理想阻抗系数的自适应学习率,β为理想刚度系数的自适应学习率。
[0030]
进一步地,所述第三控制器是导纳-位置控制器,用于对所述第二控制器所产生的期望轨迹曲线进行精确跟踪;所述下肢助力外骨骼的刚度模型和运动学模型为:
[0031][0032][0033]
式中,为刚度模型下所需鲍登线位置,为运动学模型下所需鲍登线位置,h1与h2是刚度模型的常系数,g是运动学模型的常系数;
[0034]
然后,将鲍登线期望速度作为反馈项发送到内部速度控制电路,内部导纳方程为:
[0035][0036]
最后,根据预设的刚度模型和运动学模型,外部导纳方程为:
[0037][0038]
式中,vd(t)为鲍登线期望速度。
[0039]
进一步地,内部速度控制回路中的速度控制器将速度误差转换为期望电流,然后将所述期望电流发送到驱动系统,所述期望电流的计算式为:
[0040]
id(t)=f(f(t),vd(t)),
[0041]
式中,id(t)是期望电流。
[0042]
进一步地,所述控制系统的工作过程包括以下步骤:
[0043]
在站立早期,所述外骨骼控制系统由所述足底压力鞋垫反馈力触发工作,并将f
sole
(t)输入至所述第一控制器中触发步态识别算法;模糊神经网络采集的3个所述角度传感器的数据融合计算得出髋关节角度,输入训练模型预测出期望步态相位点pd(t),再经由髋关节轨迹生成器生成期望角度qd(t);
[0044]
所述第二控制器中自适应阻抗控制策略融合角度误差信息与所述第一拉力传感器、所述第二拉力传感器信息输出人机交互力f(t),并通过自适应算法实现人机力交互协同控制;
[0045]
所述第三控制器中的导纳-位置控制器根据人机交互力f(t)预测出鲍登线期望速度vd(t),并经由所述第三控制器中的速度控制器输出期望电流id(t)以控制所述驱动个控制装置的电机转速,使得鲍登线收缩以辅助髋关节伸展。
[0046]
进一步地,当髋关节角度变化量小于设定的阈值时,所述柔性下肢助力外骨骼停止工作。
[0047]
本发明至少具有如下有益技术效果:
[0048]
1、本发明提供的穿戴式柔性下肢助力外骨骼控制系统,采用三级控制器组成整个控制系统,第一控制器基于人机环境耦合下多模态信息融合的步态识别算法,用于下肢运动意图识别检测与步态相位状态的估计;第二控制器采用自适应阻抗控制策略,用于人体运动状态与助力策略融合的过程,将用户的运动意图转换为第三控制器所需的期望轨迹,并通过自适应算法实现人机力交互协同控制;第三控制器是导纳-位置控制器,用于对第二控制器所产生的期望轨迹曲线进行精确跟踪,每级控制器各司其职、互不干涉并协同控制柔性下肢外骨骼快速跟踪响应控制指令。
[0049]
2、本发明提供的穿戴式柔性下肢助力外骨骼控制系统,步态识别算法采用模糊神经网络对多模态信息融合的步态数据进行训练、学习及步态规划,模糊神经网络仅需要学习少量的样本,就能够生成经过不同期望步态相位点的角度/位置/速度等适应性动作,具有较好的泛化能力和适应性。
[0050]
以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
[0051]
图1是本发明实施例提供的步态识别算法使用的模糊神经网络结构图;
[0052]
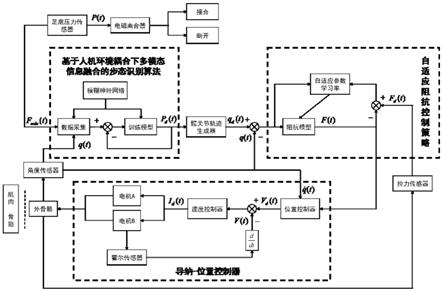
图2是本发明实施例提供的穿戴式柔性助力外骨骼控制系统整体示意图;
[0053]
图3是本发明实施例的下肢助力外骨骼穿戴效果侧面示意图;
[0054]
图4是本发明实施例的下肢助力外骨骼穿戴效果背面示意图;
[0055]
图5是本发明实施例的下肢助力外骨骼穿戴效果正面示意图;
[0056]
图6是本发明实施例提供的足底压力鞋垫的示意图;
[0057]
图7是本发明实施例提供的穿戴式柔性助力外骨骼控制系统工作流程图。
具体实施方式
[0058]
以下参考说明书附图介绍本发明的多个优选实施例,使其技术内容更加清楚和便于理解。本发明可以通过许多不同形式的实施例来得以体现,本发明的保护范围并非仅限于文中提到的实施例。
[0059]
在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本发明并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方适当夸大了部件的厚度。
[0060]
本发明提供了一种穿戴式柔性下肢助力外骨骼控制系统,用于穿戴式柔性下肢助力外骨骼的控制。如图3至图6所示,本发明的穿戴式柔性下肢助力外骨骼包括柔性服2、驱动控制系统3、传感系统4、弹性驱动装置5、柔性绑缚装置6、鲍登线驱动装置7,在人体前侧还设置有电池1。传感系统4包括:分别设置于大腿两侧和背部的角度传感器,用于监测髋关节角度;设置于弹性驱动装置5的第一拉力传感器,对应图4的附图标记400;与鲍登线驱动装置7和柔性绑缚装置6连接的第二拉力传感器,用于监测鲍登线驱动力;足底压力鞋垫,对应附图6,用于实时监测足底压力值。穿戴式柔性下肢助力外骨骼已在专利申请202111505445.1中详细披露,此处不再详述。
[0061]
本发明的穿戴式柔性下肢助力外骨骼控制系统,主要通过三级控制器实现,分别
为第一控制器、第二控制器、第三控制器。第一控制器基于人机环境耦合下多模态信息融合的步态识别算法,用于下肢运动意图识别检测与步态相位状态的估计;第二控制器采用自适应阻抗控制策略,用于人体运动状态与助力策略融合的过程,将用户的运动意图转换为第三控制器所需的期望轨迹,并通过自适应算法实现人机力交互协同控制;第三控制器是导纳-位置控制器,用于对第二控制器所产生的期望轨迹曲线进行精确跟踪。各控制器的功能和实现方式具体如下。
[0062]
第一控制器,采用基于人机环境耦合下多模态信息融合的步态识别算法,具体实现过程为:
[0063]
通过足底压力鞋垫获取足底压力分布信息,通过两侧和背部角度传感器融合测算髋关节姿态信息;
[0064]
根据所获取的足底压力分布信息将步态相位进行初步划分判断,考虑到步行过程中足底压力中心主要集中在前脚掌及后脚跟周围,通过实时采集这两个区域内的压力值进行模糊逻辑推理计算并划分步态相位;其中,压力值同时较大的为支撑相位期,同时较小为摆动相位期;再融合所获取的髋关节角度信息并输入模糊神经网络中进一步预测精确地步态相位点。
[0065]
具体地,模糊神经网络训练过程如下:首先,设定期望步态相位点pd(t);然后,在设定范围内选取适当的控制参数k进行预实验,采集步行过程中的足底压力f
sole
(t)、髋关节角度q(t);最后,设定期望偏差ef、eq,再计算指标偏差fe、qe作为模型输入,以控制参数k作为模型输出,进行模糊神经网络训练。如果期望步态相位点发生变化,则重复上述过程,反之则完成模型训练。
[0066]
具体地,模糊神经网络结构如图1所示,其中输入层共有3个节点,该模型输入向量为χ=[x1,x2,
…
,xn]
t
,
[0067][0068]
假设每个模糊向量变量对应的隶属函数为:
[0069][0070]
采用高斯函数作为隶属函数:
[0071][0072]
式中,c
ij
和σ
ij
分别表示隶属函数的尖峰中心位置以及宽度。
[0073]
具体地,需要优化隶属函数参数以及线性函数加权系数,设误差代价函数为
[0074][0075]
式中,y
dk
表示期望的输出,yk表示实际的输出。最后,可以得到隶属函数参数学习方法如下:
[0076]
[0077][0078]
具体地,将模糊神经网络中预测的步态相位点pd(t)输入髋关节轨迹生成器中生成期望角度qd(t)。
[0079]
第二控制器,采用自适应阻抗控制策略,并通过自适应算法实现人机力交互协同控制,具体实现过程如下:
[0080]
自适应阻抗控制策略的核心目标是降低柔性下肢助力外骨骼与人体在步态周期中的人机交互力,自适应阻抗控制框图如图2所示。柔性下肢助力外骨骼在步态周期中关节空间的阻抗模型可表示为:
[0081][0082]
其中,mk(t)是自适应惯性系数,bk(t)是自适应阻尼系数,kk(t)是自适应刚度系数,qd(t)是髋关节期望角度,q(t)是髋关节实际角度,f(t)是输出的人机交互力。
[0083]
在穿戴式柔性外骨骼行走过程中,基于人机环境耦合下的交互力时刻变化,因此阻抗参数为适应力交互协同控制会随之改变。为了构建自适应参数学习率,将人机交互力偏差和髋关节角度误差作为代价函数,定义如下:
[0084][0085]eq
(t)=qd(t)-q(t),
[0086]ef
(t)=fd(t)-f(t),
[0087]
其中,λ(t)是代价函数,eq(t)是髋关节角度误差,ef(s)是eq(t)经过拉普拉斯变换得到的频域函数,ef(t)是人机交互力偏差,fd(t)是人机交互期望力。
[0088]
采用梯度下降法不断改变bd(t)和kd(t)的值使得λ(t)不断减小,最后获得的自适应参数学习率为:
[0089][0090][0091]
其中,k为迭代次数,α为理想阻抗系数的自适应学习率,β为理想刚度系数的自适应学习率。
[0092]
第三控制器,采用导纳-位置控制器,用于对第二控制器所产生的期望轨迹曲线进行精确跟踪,具体实现过程如下:
[0093]
鉴于外骨骼的柔性、非线性、步行的扰动以及绳索力的变化等因素的影响,一般导纳控制器不能表现出良好的跟踪性能。为了克服这些限制,将外骨骼的刚度模型和运动学模型表示为
[0094][0095][0096]
其中,为刚度模型下所需鲍登线位置,为运动学模型下所需鲍登线位
置,h1与h2是刚度模型的常系数,g是运动学模型的常系数。
[0097]
外部导纳控制回路中的虚拟导纳将力误差转换为鲍登线期望速度vd(t),然后将其作为反馈项发送到内部速度控制回路。内部导纳方程可定义为:
[0098][0099]
根据预设的刚度模型和运动学模型,外部导纳方程定义为:
[0100][0101]
内部速度控制回路中的速度控制器将速度误差转换为期望电流id(t),然后将该电流发送到驱动系统:
[0102]
id(t)=f(f(t),vd(t))。
[0103]
内部速度控制器采用pid控制形式,通过向电机提供所需电流来实现更快的速度跟踪。
[0104]
如图7所示,本发明的穿戴式柔性下肢助力外骨骼控制系统的具体工作过程如下:
[0105]
在站立早期,外骨骼控制系统由足底压力鞋垫反馈力触发工作,并将f
sole
(t)输入至第一控制器中触发步态识别算法;模糊神经网络采集的3个角度传感器数据并融合计算得出的髋关节角度,输入训练模型预测出期望步态相位点pd(t),再经由髋关节轨迹生成器中生成期望角度qd(t);
[0106]
第二控制器中自适应阻抗控制策略融合角度误差信息与第一拉力传感器、第二拉力传感器信息输出人机交互力f(t),并通过自适应算法实现人机力交互协同控制;
[0107]
第三控制器中导纳-位置控制器根据人机交互力f(t)预测出鲍登线期望速度vd(t),并经由第三控制器中的速度控制器输出期望电流id(t)以控制驱动控制系统3的电机的转速,使得鲍登线收缩以辅助髋关节伸展。
[0108]
具体地,驱动控制装置的步态相位分离器是否接合受足底压力鞋垫控制;当足底压力鞋垫反馈力将接近于零,此时步态周期处于站立末期并即将进入摆动相,触发步态相位分离器断电松开,电机停转,使鲍登线不再收缩;同时,弹性驱动装置5上储存的弹性势能开始释放能量辅助髋关节进行屈曲;当足底压力鞋垫反馈力大于零时,此时即将进入下一个步态周期的站立相,触发步态相位分离器通电接合,再次触发的步态识别算法并重复以上步骤的工作过程。
[0109]
判断下肢助力外骨骼停止工作的条件是当髋关节角度变化量小于趋近零的某个设定的阈值。
[0110]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1