一种多功能麻醉科用辅助麻醉装置的制作方法
1.本发明涉及麻醉科辅助技术领域,具体为一种多功能麻醉科用辅助麻醉装置。
背景技术:
2.麻醉科是一个综合性的学科,它包含多学科的知识,范围很广,不单单是满足手术的要求,还参入各科室的抢救工作,妇科的无痛分娩,无痛流产等等。确保病人在无痛与安全的条件下顺利地接受手术治疗,是麻醉临床的基本任务,但这还只是现代麻醉学科的部分工作内容,麻醉工作还包括麻醉前后的准备和处理,危重病人的监测治疗,急救复苏、疼痛治疗等方面的工作,工作范围从手术室扩展到病室、门诊、急诊室等场所,从临床医疗到教学、科学研究,随着工作范围的日益扩大,工作任务日益繁重。
3.现有技术中,患者在麻醉前后都需要躺在病床上进行辅助治疗,由于长时间的卧床,不仅不利于患者快速康复,也容易产生褥疮;这个过程中,往往会让患者从床上转移到轮椅上去晒晒太阳等,这个过程中往往容易拉扯到患者的伤口,从而造成二次伤害,同时这个过程也需要多名医护人员共同协作,大大加大了医护人员的工作难度;此外,现有技术中,床椅在应用过程中往往存在稳定性差的问题,容易在变换过程中因为稳定性差导致倾倒;因此,急需一种多功能麻醉科用辅助麻醉装置来解决当前问题。
技术实现要素:
4.为解决上述问题,本发明提出了一种多功能麻醉科用辅助麻醉装置,有效解决了现有技术中患者长期卧床导致的康复缓慢、褥疮、患者转移过程中拉扯伤口和床椅稳定性差等问题,大大加快了患者的康复进程,同时也大大降低了医护人员的工作难度。
5.为实现上述目的,本发明提出了一种多功能麻醉科用辅助麻醉装置,包括本体,本体下方滑动连接有两对第一伸缩连杆,本体内设置有与第一伸缩连杆相配合的第一滑动机构,第一伸缩连杆上均转动连接有万向轮;本体上固接有坐板,坐板上滑动连接有一对扶手,坐板内设置有与扶手相配合的第一升降机构,坐板内滑动连接有滑动按摩盘,坐板内设置有与滑动按摩盘相配合的第一按摩机构;本体上转动连接有与坐板相配合的第一靠板和第二靠板,本体内设置有与第一靠板和第二靠板相配合的第一调节机构;第一调节机构同时与第一滑动机构和第一升降机构相连接;第二靠板上转动连接有第一按摩盘,第二靠板内设置有与第一按摩盘相配合的第二按摩机构,第二按摩机构与第一按摩机构相连接。
6.进一步地:第一调节机构包括本体内转动连接的第一主动锥齿轮,本体内转动连接有与第一主动锥齿轮相啮合的第二主动锥齿轮,第二主动锥齿轮同轴固接有第二蜗杆,本体内转动连接有与第二蜗杆相啮合的第二蜗轮,第二蜗轮同轴固接有第一宽齿轮,本体内滑动连接有与第一宽齿轮相啮合的第一宽齿条,第一宽齿条上固接有第一固定滑柱,第一固定滑柱外套接有第一活动滑套,第一活动滑套上固接有一对相对称的第一固定连杆,第一固定连杆上均转动连接有第一主动连杆,第一固定连杆与第一主动连杆中部转动连接,第一主动连杆两端分别转动连接有第一调节连杆和第二调节连杆,第一调节连杆和第
二调节连杆均与本体转动连接,第一调节连杆和第二调节连杆分别与第一靠板和第二靠板固接。
7.进一步地:第一滑动机构包括本体内转动连接有与第二主动锥齿轮相啮合的第三主动锥齿轮,第三主动锥齿轮同轴固接有第一蜗杆,本体内转动连接有与第一蜗杆相啮合的第一蜗轮,第一蜗轮同轴固接有第一调节齿轮,本体内滑动连接有与第一调节齿轮相啮合的第一升降齿条,第一升降齿条下方固接有第一连接滑杆,第一连接滑杆上转动连接有两对第一旋转连杆,第一旋转连杆分别与相对应的第一伸缩连杆转动连接。
8.进一步地:第一升降机构包括本体内与第一蜗轮同轴固接的第一主动连接锥齿轮,本体内转动连接有与第一主动连接锥齿轮相啮合的第一从动连接主持轮,第一从动连接主持轮同轴固接有第二从动转向锥齿轮,坐板内转动连接有与第二从动转向锥齿轮相啮合的第二主动转向锥齿轮,第二主动转向锥齿轮同轴固接有第一从动转向锥齿轮,坐板内转动连接有与第一从动转向锥齿轮相啮合的第一主动转向锥齿轮,第一主动转向锥齿轮同轴固接有第一调节螺杆,第一调节螺杆上螺接有第一调节螺套,第一调节螺套上转动连接有第一调节连杆,第一调节连杆另一端与扶手转动连接,坐板内转动连接有第二主动功能锥齿轮,坐板内转动连接有一对第二从动功能锥齿轮,第二从动功能锥齿轮均与第二主动功能锥齿轮相啮合,第二从动功能锥齿轮在第二主动功能锥齿轮两侧呈对称设置;第二从动功能锥齿轮与第一调节螺杆同轴固接;同时第二主动功能锥齿轮带动另一侧第一升降机构进行运动。
9.进一步地:本体内转动连接第一主动功能锥齿轮,第一主动功能锥齿轮两侧对称设置有第一从动功能锥齿轮,第一从动功能锥齿轮均与第一主动功能锥齿轮相啮合;第一按摩机构包括一对第一辅助机构,第一辅助机构包括与第一从动功能锥齿轮同轴固接的第一功能蜗杆,坐板内转动连接有与第一功能蜗杆相啮合的第一从动蜗轮,第一从动蜗轮同轴固接有第一升降连杆,第一升降连杆另一端转动连接有第二升降连杆,第二升降连杆与滑动按摩盘转动连接,同时第二升降连杆上转动连接有第三升降连杆,第三升降连杆另一端与坐板转动连接。
10.进一步地:第一从动功能锥齿轮同轴固接有第二带轮槽和电机,坐板内转动连接有与第二带轮槽相配合的第一带轮槽,第一带轮槽和第二带轮槽通过皮带相连接,第一带轮槽同轴固接有第二从动控制锥齿轮,坐板内转动连接有与第二从动控制锥齿轮相啮合的第二主动控制锥齿轮,第二主动控制锥齿轮同轴固接有第二从动平齿轮,本体上转动连接有与第二从动平齿轮相啮合的第一轴齿轮,第二靠板内转动连接有与第一轴齿轮相啮合的第二主动平齿轮,第二主动平齿轮同轴固接有第一从动控制锥齿轮,第二靠板内转动连接有与第一从动控制锥齿轮相啮合的第一主动控制锥齿轮,第一主动控制锥齿轮同轴固接有第一从动平齿轮,第二靠板内转动连接有与第一从动平齿轮相啮合的第一主动平齿轮,第二按摩机构包括与第一主动平齿轮同轴固接的第三蜗杆,第二靠板内转动连接有与第三蜗杆相啮合的第三蜗轮,第三蜗轮同轴固接有第一旋转调节盘,第一旋转调节盘上转动连接有第一控制连杆,第一控制连杆另一端转动连接有第一控制滑块,第二靠板内转动连接有与第一控制滑块相配合的第二蜗杆,第二蜗杆与第一旋转齿轮盘同轴固接。
11.进一步地:第一控制连杆与第一旋转调节盘转动连接位置位于第一旋转调节盘边缘。
12.进一步地:第一控制滑块上设置有一对与第二蜗杆相配合的卡块。
13.进一步地:第二蜗杆和滑动按摩盘上均设置有按摩头,本体上设置有与滑动按摩盘相配合的滑槽。
14.与现有技术相比,本发明的有益效果是:
15.1、本发明构思巧妙,创造性强,坐板、第一靠板和第二靠板的设置试下了床椅的变换,有效解决了对患者伤口拉扯的问题,第一滑动机构和第一调节机构间的配合,有效解决了床椅变换过程中稳定性差的问题。
16.2、本发明功能全面,实用性强,第一按摩机构和第二按摩机构的配合,实现了对患者的按摩,加快了患者的血液循环,同时也解决了褥疮的产生,大大加快了患者的康复进程。
附图说明
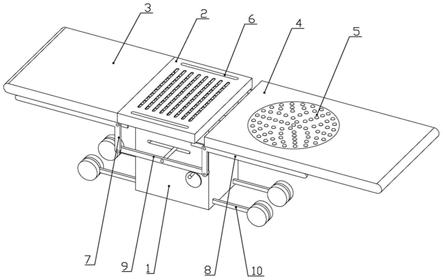
17.图1为本发明立体图。
18.图2为本发明结构图。
19.图3为本发明结构立体图。
20.图4为本发明局部架构图。
21.图5为本发明局部结构立体图。
22.图6为本发明第一滑动机构局部立体图。
23.图7为本发明第一升降机构连接立体图。
24.图8为本发明第一升降机构局部立体图。
25.图9为本发明第二按摩机构立体图。
26.图10为本发明第一按摩机构立体图。
27.图11为本发明第一按摩机构局部立体图。
28.图12为本发明第二按摩机构局部立体图。
29.图13为本发明第二按摩机构局部立体图。
30.图中:1、本体,2、坐板,3、第一靠板,4、第二靠板,5、第一按摩盘。6、扶手,7、第一调节连杆,8、第二调节连杆,9、第一主动连杆,10、第一伸缩连杆,11、第一旋转连杆,12、第一主动锥齿轮,13、第二主动锥齿轮,14、第三主动锥齿轮,15、第一蜗杆,16、第一蜗轮,17、第一调节齿轮,18、第一升降齿条,19、第一连接滑杆,20、第一旋转齿轮盘,21、第二蜗杆,22、第二蜗轮,23、第一宽齿轮,24、第一宽齿条,25、第一固定滑柱,26、第一活动滑套,27、第一固定连杆,28、第一主动连接锥齿轮,29、第一从动连接主持轮,30、第一控制滑块,31、第一控制连杆,32、第一旋转调节盘,33、第三蜗轮,34、第三蜗杆,35、第一主动平齿轮,36、第一从动平齿轮,37、第一主动控制锥齿轮,38、第一从动控制锥齿轮,39、第二主动平齿轮,40、第一轴齿轮,41、第二从动平齿轮,42、第二主动控制锥齿轮,43、第二从动控制锥齿轮,44、第一带轮槽,45、第二带轮槽,46、第一主动功能锥齿轮,47、第一从动功能锥齿轮,48、第一功能蜗杆,49、第一从动蜗轮,50、第一升降连杆,51、第二升降连杆,52、第三升降连杆,53、第二主动功能锥齿轮,54、第二从动功能锥齿轮,55、第一调节螺杆,56、第一调节螺套,57、第一调节连杆,58、第一主动转向锥齿轮,59、第一从动转向锥齿轮,60、第二主动转向锥齿轮,61、第二从动转向锥齿轮,62、滑动按摩盘。
具体实施方式
31.一种多功能麻醉科用辅助麻醉装置,包括本体1,本体1下方滑动连接有两对第一伸缩连杆10,本体1内设置有与第一伸缩连杆10相配合的第一滑动机构,第一伸缩连杆10上均转动连接有万向轮;本体1上固接有坐板2,坐板2上滑动连接有一对扶手6,坐板2内设置有与扶手6相配合的第一升降机构,坐板2内滑动连接有滑动按摩盘62,坐板2内设置有与滑动按摩盘62相配合的第一按摩机构;本体1上转动连接有与坐板2相配合的第一靠板3和第二靠板4,本体1内设置有与第一靠板3和第二靠板4相配合的第一调节机构;第一调节机构同时与第一滑动机构和第一升降机构相连接;第二靠板4上转动连接有第一按摩盘5,第二靠板4内设置有与第一按摩盘5相配合的第二按摩机构,第二按摩机构与第一按摩机构相连接。
32.如图1、2、3和4所示:医护人员在操作本发明时,当患者需要将床变成轮椅时,医护人员可转动第一主动锥齿轮12带动第一调节机构、第一升降机构和第一按摩机构进行运动,从而第一靠板3、第二靠板4、扶手6和第一伸缩连杆10的运动,实现变换运动,当需要将轮椅变成床时,只需要反向转动第一主动锥齿轮12即可完成操作,当需要对患者进行按摩时,医护人员可打开电机带动第一按摩机构和第二按摩机构对患者进行按摩,有效解决了现有技术中患者长期卧床导致的康复缓慢、褥疮、患者转移过程中拉扯伤口和床椅稳定性差等问题,大大加快了患者的康复进程,同时也大大降低了医护人员的工作难度。
33.第一调节机构包括本体1内转动连接的第一主动锥齿轮12,本体1内转动连接有与第一主动锥齿轮12相啮合的第二主动锥齿轮13,第二主动锥齿轮13同轴固接有第二蜗杆21,本体1内转动连接有与第二蜗杆21相啮合的第二蜗轮22,第二蜗轮22同轴固接有第一宽齿轮23,本体1内滑动连接有与第一宽齿轮23相啮合的第一宽齿条24,第一宽齿条24上固接有第一固定滑柱25,第一固定滑柱25外套接有第一活动滑套26,第一活动滑套26上固接有一对相对称的第一固定连杆27,第一固定连杆27上均转动连接有第一主动连杆9,第一固定连杆27与第一主动连杆9中部转动连接,第一主动连杆9两端分别转动连接有第一调节连杆7和第二调节连杆8,第一调节连杆7和第二调节连杆8均与本体1转动连接,第一调节连杆7和第二调节连杆8分别与第一靠板3和第二靠板4固接。
34.如图3、4和5所示:当医护人员转动第一主动锥齿轮12时,第一主动锥齿轮12转动通过第二主动锥齿轮13和第二蜗杆21带动第二蜗轮22进行转动,第二蜗轮22转动通过第一宽齿轮23和第一宽齿条24带动第一固定滑柱25进行滑动,第一固定滑柱25滑动带动第一活动滑套26和第一固定连杆27进行升降和滑动,在坐板2的定位下,第一固定连杆27运动通过第一主动连杆9带动第一调节连杆7和第二调节连杆8进行平行四边形运动,从而实现对第一靠板3和第二靠板4的调节。
35.第一滑动机构包括本体1内转动连接有与第二主动锥齿轮13相啮合的第三主动锥齿轮14,第三主动锥齿轮14同轴固接有第一蜗杆15,本体1内转动连接有与第一蜗杆15相啮合的第一蜗轮16,第一蜗轮16同轴固接有第一调节齿轮17,本体1内滑动连接有与第一调节齿轮17相啮合的第一升降齿条18,第一升降齿条18下方固接有第一连接滑杆19,第一连接滑杆19上转动连接有两对第一旋转连杆11,第一旋转连杆11分别与相对应的第一伸缩连杆10转动连接。
36.如图5和6所示:第二主动锥齿轮13转动通过第三主动锥齿轮14和第一蜗杆15带动
第一蜗轮16进行转动,第一蜗轮16转动通过第一调节齿轮17和第一升降齿条18带动第一连接滑杆19进行滑动,第一连接滑杆19滑动通过第一旋转连杆11带动相对应的第一伸缩连杆10进行滑动,从而实现对轮距的调节。
37.第一升降机构包括本体1内与第一蜗轮16同轴固接的第一主动连接锥齿轮28,本体1内转动连接有与第一主动连接锥齿轮28相啮合的第一从动连接主持轮29,第一从动连接主持轮29同轴固接有第二从动转向锥齿轮61,坐板2内转动连接有与第二从动转向锥齿轮61相啮合的第二主动转向锥齿轮60,第二主动转向锥齿轮60同轴固接有第一从动转向锥齿轮59,坐板2内转动连接有与第一从动转向锥齿轮59相啮合的第一主动转向锥齿轮58,第一主动转向锥齿轮58同轴固接有第一调节螺杆55,第一调节螺杆55上螺接有第一调节螺套56,第一调节螺套56上转动连接有第一调节连杆57,第一调节连杆57另一端与扶手6转动连接,坐板2内转动连接有第二主动功能锥齿轮53,坐板2内转动连接有一对第二从动功能锥齿轮54,第二从动功能锥齿轮54均与第二主动功能锥齿轮53相啮合,第二从动功能锥齿轮54在第二主动功能锥齿轮53两侧呈对称设置;第二从动功能锥齿轮54与第一调节螺杆55同轴固接;同时第二主动功能锥齿轮53带动另一侧第一升降机构进行运动。
38.如图5、7和8所示:第一蜗轮16转动通过第一主动连接锥齿轮28和第一从动连接主持轮29带动第二从动转向锥齿轮61进行转动,第二从动转向锥齿轮61转动通过第二主动转向锥齿轮60和第一从动转向锥齿轮59带动第一主动转向锥齿轮58进行转动,第一主动转向锥齿轮58转动通过第一调节螺杆55带动第二从动功能锥齿轮54和第二主动功能锥齿轮53进行转动,从而实现对联动机构的运动,第一调节螺杆55转动带动第一调节螺套56在第一调节螺杆55上进行滑动,第一调节螺套56滑动带动第一调节连杆57进行转动,在一对第一调节连杆57的作用下实现对扶手6的调节。
39.本体1内转动连接第一主动功能锥齿轮46,第一主动功能锥齿轮46两侧对称设置有第一从动功能锥齿轮47,第一从动功能锥齿轮47均与第一主动功能锥齿轮46相啮合;第一按摩机构包括一对第一辅助机构,第一辅助机构包括与第一从动功能锥齿轮47同轴固接的第一功能蜗杆48,坐板2内转动连接有与第一功能蜗杆48相啮合的第一从动蜗轮49,第一从动蜗轮49同轴固接有第一升降连杆50,第一升降连杆50另一端转动连接有第二升降连杆51,第二升降连杆51与滑动按摩盘62转动连接,同时第二升降连杆51上转动连接有第三升降连杆52,第三升降连杆52另一端与坐板2转动连接。
40.如图10和11所示:当电机带动第一主动功能锥齿轮46转动时,第一主动功能锥齿轮46转动带动两侧第一从动功能锥齿轮47进行转动,第一从动功能锥齿轮47转动通过第一功能蜗杆48带动第一从动蜗轮49进行转动,第一从动蜗轮49转动通过第一升降连杆50带动第二升降连杆51和第三升降连杆52转动,在两侧第二升降连杆51和第三升降连杆52的共同作用下实现对滑动按摩盘62在坐板2内滑槽进行运动,实现对患者的按摩。
41.第一从动功能锥齿轮47同轴固接有第二带轮槽45和电机,坐板2内转动连接有与第二带轮槽45相配合的第一带轮槽44,第一带轮槽44和第二带轮槽45通过皮带相连接,第一带轮槽44同轴固接有第二从动控制锥齿轮43,坐板2内转动连接有与第二从动控制锥齿轮43相啮合的第二主动控制锥齿轮42,第二主动控制锥齿轮42同轴固接有第二从动平齿轮41,本体1上转动连接有与第二从动平齿轮41相啮合的第一轴齿轮40,第二靠板4内转动连接有与第一轴齿轮40相啮合的第二主动平齿轮39,第二主动平齿轮39同轴固接有第一从动
控制锥齿轮38,第二靠板4内转动连接有与第一从动控制锥齿轮38相啮合的第一主动控制锥齿轮37,第一主动控制锥齿轮37同轴固接有第一从动平齿轮36,第二靠板4内转动连接有与第一从动平齿轮36相啮合的第一主动平齿轮35,第二按摩机构包括与第一主动平齿轮35同轴固接的第三蜗杆34,第二靠板4内转动连接有与第三蜗杆34相啮合的第三蜗轮33,第三蜗轮33同轴固接有第一旋转调节盘32,第一旋转调节盘32上转动连接有第一控制连杆31,第一控制连杆31另一端转动连接有第一控制滑块30,第二靠板4内转动连接有与第一控制滑块30相配合的第二蜗杆21,第二蜗杆21与第一旋转齿轮盘20同轴固接。
42.如图9、10、12和13所示:电机通过第二带轮槽45和皮带带动第一带轮槽44转动时,第一带轮槽44转动通过第二从动控制锥齿轮43和第二主动控制锥齿轮42带动第二从动平齿轮41进行转动,第二从动平齿轮41转动通过第一轴齿轮40和第二主动平齿轮39带动第一从动控制锥齿轮38进行转动,第一从动控制锥齿轮38转动通过第一主动控制锥齿轮37和第一从动平齿轮36带动第一主动平齿轮35进行转动,第一主动平齿轮35转动通过第三蜗杆34和第三蜗轮33带动第一旋转调节盘32进行转动,第一旋转调节盘32转动通过第一控制连杆31带动第一控制滑块30滑动,从而实现第一控制滑块30通过第二蜗杆21带动第一旋转齿轮盘20进行运动,实现对患者的按摩。
43.第一控制连杆31与第一旋转调节盘32转动连接位置位于第一旋转调节盘32边缘。
44.如图9所示:第一控制连杆31与第一旋转调节盘32转动连接位置位于第一旋转调节盘32边缘的设置保证了第二按摩机构功能性完整。
45.第一控制滑块30上设置有一对与第二蜗杆21相配合的卡块。
46.如图12和13所示:第一控制滑块30上一对卡块的设置在实现带动第二蜗杆21运动的同时也实现了对第二蜗杆21转动速率的调节,从而实现对患者进行舒缓按摩。
47.第二蜗杆21和滑动按摩盘62上均设置有按摩头,本体1上设置有与滑动按摩盘62相配合的滑槽。
48.如图1所示:按摩头的设置实现了按摩功能的完整;滑槽的设置保证了第一按摩机构功能的完整。
49.本发明的工作过程为:
50.如图1、2、3和4所示:医护人员在操作本发明时,当患者需要将床变成轮椅时,医护人员可转动第一主动锥齿轮12带动第一调节机构、第一升降机构和第一按摩机构进行运动,从而第一靠板3、第二靠板4、扶手6和第一伸缩连杆10的运动,实现变换运动,在此过程中;当医护人员转动第一主动锥齿轮12时,第一主动锥齿轮12转动通过第二主动锥齿轮13和第二蜗杆21带动第二蜗轮22进行转动,第二蜗轮22转动通过第一宽齿轮23和第一宽齿条24带动第一固定滑柱25进行滑动,第一固定滑柱25滑动带动第一活动滑套26和第一固定连杆27进行升降和滑动,在坐板2的定位下,第一固定连杆27运动通过第一主动连杆9带动第一调节连杆7和第二调节连杆8进行平行四边形运动,从而实现对第一靠板3和第二靠板4的调节;第二主动锥齿轮13转动通过第三主动锥齿轮14和第一蜗杆15带动第一蜗轮16进行转动,第一蜗轮16转动通过第一调节齿轮17和第一升降齿条18带动第一连接滑杆19进行滑动,第一连接滑杆19滑动通过第一旋转连杆11带动相对应的第一伸缩连杆10进行滑动,从而实现对轮距的调节;第一蜗轮16转动通过第一主动连接锥齿轮28和第一从动连接主持轮29带动第二从动转向锥齿轮61进行转动,第二从动转向锥齿轮61转动通过第二主动转向锥
齿轮60和第一从动转向锥齿轮59带动第一主动转向锥齿轮58进行转动,第一主动转向锥齿轮58转动通过第一调节螺杆55带动第二从动功能锥齿轮54和第二主动功能锥齿轮53进行转动,从而实现对联动机构的运动,第一调节螺杆55转动带动第一调节螺套56在第一调节螺杆55上进行滑动,第一调节螺套56滑动带动第一调节连杆57进行转动,在一对第一调节连杆57的作用下实现对扶手6的调节;当需要将轮椅变成床时,只需要反向转动第一主动锥齿轮12即可完成操作。
51.当需要对患者进行按摩时,医护人员可打开电机带动第一按摩机构和第二按摩机构对患者进行按摩,第一蜗轮16转动通过第一主动连接锥齿轮28和第一从动连接主持轮29带动第二从动转向锥齿轮61进行转动,第二从动转向锥齿轮61转动通过第二主动转向锥齿轮60和第一从动转向锥齿轮59带动第一主动转向锥齿轮58进行转动,第一主动转向锥齿轮58转动通过第一调节螺杆55带动第二从动功能锥齿轮54和第二主动功能锥齿轮53进行转动,从而实现对联动机构的运动,第一调节螺杆55转动带动第一调节螺套56在第一调节螺杆55上进行滑动,第一调节螺套56滑动带动第一调节连杆57进行转动,在一对第一调节连杆57的作用下实现对扶手6的调节;电机通过第二带轮槽45和皮带带动第一带轮槽44转动时,第一带轮槽44转动通过第二从动控制锥齿轮43和第二主动控制锥齿轮42带动第二从动平齿轮41进行转动,第二从动平齿轮41转动通过第一轴齿轮40和第二主动平齿轮39带动第一从动控制锥齿轮38进行转动,第一从动控制锥齿轮38转动通过第一主动控制锥齿轮37和第一从动平齿轮36带动第一主动平齿轮35进行转动,第一主动平齿轮35转动通过第三蜗杆34和第三蜗轮33带动第一旋转调节盘32进行转动,第一旋转调节盘32转动通过第一控制连杆31带动第一控制滑块30滑动,从而实现第一控制滑块30通过第二蜗杆21带动第一旋转齿轮盘20进行运动,实现对患者的按摩;有效解决了现有技术中患者长期卧床导致的康复缓慢、褥疮、患者转移过程中拉扯伤口和床椅稳定性差等问题,大大加快了患者的康复进程,同时也大大降低了医护人员的工作难度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1