具有可调整高度夹钳构件的外科缝合设备的制作方法
1.本公开涉及具有用于设置组织间隙的夹钳构件的外科缝合装置。更确切地说,本公开涉及具有夹钳构件的外科缝合装置,所述夹钳构件具有用于调整组织间隙的可调整高度。
背景技术:
2.用于缝合组织的外科缝合装置在所属领域中为众所周知的,且通常包含手柄组件、从手柄组件向远侧延伸的主体部分、和支撑于主体部分的远侧端上的工具组件。工具组件包含第一钳口和第二钳口,其在打开与闭合或接近位置之间可相对于彼此移动。第一钳口包含砧座组件且第二钳口支撑容纳多个缝钉的仓仓还可包含用于割断组织的刀。在已知装置中,缝合设备包含夹钳构件,所述夹钳构件与第一钳口和第二钳口啮合且可沿着第一钳口和第二钳口移动以在缝合程序期间在砧座组件与仓之间设置组织间隙。然而,适合于外科程序的组织间隙的大小取决于所治疗的组织的厚度,所述厚度将从程序到程序改变,且可沿着第一钳口和第二钳口的长度改变。
3.所属领域中存在持续需要能够改变由夹钳构件设置的组织间隙的大小以容纳不同厚度的组织的外科缝合装置。
技术实现要素:
4.一种外科缝合装置,其包含:主体部分、工具组件和驱动组件。主体部分界定纵向轴线且具有近侧部分和远侧部分。工具组件支撑于主体部分的远侧部分上。工具组件包含:砧座组件;沟道构件,其相对于砧座组件可枢转地支撑;和钉仓,其可拆卸地安置于沟道构件内。工具组件可从打开位置移动到接近位置。钉仓支撑多个缝钉且包含致动滑块,所述致动滑块可在缩回位置与推进位置之间移动以从钉仓弹射多个缝钉。驱动组件从缩回位置到推进位置可移动地支撑于工具组件内以将工具组件从打开位置移动到接近位置且将工具组件维持于接近位置中。驱动组件包含夹钳构件和调整构件。夹钳构件包含配置成啮合砧座组件的第一夹钳表面。调整构件包含配置成啮合钉仓的第二夹钳表面。第一夹钳表面与第二夹钳表面间隔开以界定夹钳高度。调整构件可相对于夹钳构件在第一位置与第二位置之间移动以改变夹钳高度。
5.在本公开的某些方面中,调整构件的第一位置与调整构件的第二位置纵向地间隔开。调整构件的第一位置可与调整构件的第二位置竖直地间隔开。沟道构件可界定狭槽且调整构件可包含凸缘。凸缘可收纳于沟道构件的狭槽内。砧座组件可界定狭槽且夹钳构件可包含一对凸缘。夹钳构件的一对凸缘可收纳于砧座组件的狭槽内。
6.在本公开的一些方面中,驱动组件包含驱动杆和用于相对于驱动杆紧固调整构件的紧固机制。紧固构件可包含调整旋钮和从调整旋钮延伸的螺纹螺钉。驱动组件超出部分推进位置的移动可使致动滑块从缩回位置移动到推进位置以从钉仓弹射多个缝钉。夹钳构件可包含由竖直支柱互连的上部凸缘和下部凸缘。夹钳构件可定位成啮合致动滑块以在驱
动组件从缩回位置朝向完全推进位置移动时在钉仓内向远侧移动致动滑块。调整构件可包含倾斜表面且夹钳构件可包含倾斜表面。调整构件相对于夹钳构件的移动可使倾斜表面相对于彼此滑动。
7.一种用于外科缝合组件的驱动组件,其包含:夹钳构件;驱动杆,其从夹钳构件延伸和调整构件。夹钳构件包含上部凸缘部分和竖直支柱。上部凸缘包含配置成啮合砧座组件的第一夹钳表面。驱动杆从夹钳构件延伸且配置成用于与致动机制可操作啮合。调整构件相对于夹钳构件安置且包含配置成啮合钉仓的第二夹钳表面。第一夹钳表面与第二夹钳表面间隔开以界定夹钳高度。调整构件可相对于夹钳构件在第一位置与第二位置之间移动以改变夹钳高度。
8.在本公开的某些方面,上部凸缘部分配置成收纳于砧座组件的狭槽内。调整构件可包含配置成收纳于钉仓的狭槽内的凸缘部分。驱动组件可进一步包含用于相对于调整机制紧固驱动杆的紧固机制。紧固机制可为螺纹螺钉。调整构件的第一位置可与调整构件的第二位置纵向地间隔开。调整构件的第一位置可与调整构件的第二位置竖直地间隔开。
附图说明
9.本文参考图示描述本公开的各个方面,其中:
10.图1为根据本公开的方面的包含具有处于打开位置的工具组件的装载单元的电动外科缝合装置的侧面透视图;
11.图2为图1中所绘示的指示的细节区域的侧面透视图;
12.图3为图1和图2中所绘示的装载单元的分离的零件的侧面透视图;
13.图4为图1中所绘示的外科缝合装置的驱动组件的侧面透视图;
14.图5为图4中所绘示的驱动组件的分离的零件的放大侧面透视图;
15.图6为图4中所绘示的指示的细节区域的放大侧面透视图;
16.图7为图4中所绘示的指示的细节区域的放大侧面透视图;
17.图8为沿着图7中所绘示的截面线8-8截取的横截面视图;
18.图9为图1中所绘示的指示的细节区域的侧面透视图;
19.图10为图中2所绘示的工具组件处于打开位置的放大侧面横截面视图,其中驱动组件处于第一配置和处于缩回位置;
20.图11为图4中所绘示的驱动组件处于第一配置的侧面透视图;
21.图12为图10中所绘示的工具组件处于闭合位置的侧面透视图,其中驱动组件处于第一配置和处于部分推进位置;
22.图13为沿着图12中所绘示的截面线13-13截取的横截面视图;
23.图14为驱动组件处于第二配置的侧视图;
24.图15为图10中所绘示的工具组件处于闭合位置的侧面横截面视图,其中驱动组件处于第二配置和处于部分推进位置;
25.图16为沿着图15中所绘示的截面线16-16截取的横截面视图;
26.图17为根据本公开的其它方面的包含具有处于打开位置的工具组件的装载单元的人工外科缝合装置的侧面透视图;
27.图18为图4中所绘示的驱动组件的替代版本的放大侧面透视图;
28.图19为沿着图18中所绘示的截面线19-19截取的侧面横截面视图;
29.图20为图4中绘示的驱动组件的另一替代版本的各方面的侧面透视图;
30.图21为沿着图20中所绘示的截面线21-21截取的横截面视图;
31.图22为驱动组件的又一替代版本的侧面透视图;
32.图23为沿图22中所绘示的截面线23-23截取的侧面横截面视图;
33.图24为驱动组件的再一替代版本的动态夹钳构件的侧面透视图;
34.图25为沿着图24中所绘示的截面线25-25截取的侧面横截面视图;
35.图26为驱动组件的再又一替代版本的动态夹钳构件的侧面透视图;
36.图27为沿着图26中所绘示的截面线27-27截取的侧面横截面视图;
37.图28为驱动组件的另一替代版本的动态夹钳构件的侧面透视图;
38.图29为沿着图28中所绘示的截面线29-29截取的侧面横截面视图;
39.图30为驱动组件的再一替代版本的动态夹钳构件和调整杆的侧面透视图;
40.图31为图30中所绘示的动态夹钳构件和调整杆的侧面横截面视图;
41.图32为驱动组件的再又一替代版本的侧面透视图;
42.图33为图32所绘示的驱动组件的凸轮构件的俯视透视图;
43.图34为沿着图32中所绘示的截面线34-34截取的侧面横截面视图;且
44.图35为沿着图34中所绘示的截面线35-35截取的端部横截面视图。
具体实施方式
45.现将参考图示详细描述所公开的外科缝合装置,其中相同参考标号指代若干视图中的每一视图中的相同或对应元件。然而,应理解,本公开的所公开的方面仅仅为本公开的示例,且可以各种形式实施。未详细描述众所周知的功能或构造以免以不必要的细节混淆本公开。因此,本文所公开的特定结构和功能细节不应被解释为限制性的,而是仅仅解释为权利要求书的基础,和用于教示所属领域的技术人员用实际上任何适当的详细结构以不同方式使用本公开的代表性基础。此外,例如前部、后部、上部、下部、顶部、底部、远侧、近侧的方向术语和类似术语用于帮助理解描述,且并不旨在限制本公开。
46.在此描述中,术语“近侧”一般用于指代装置的较靠近临床医生的部分,而术语“远侧”一般用于指代装置的距临床医生较远的部分。此外,术语“临床医生”一般用于指代包含医生、护士和辅助人员的医务人员。
47.所公开的外科缝合装置包含具有动态夹钳构件的驱动组件,所述动态夹钳构件配置有用于调整砧座的组织接触表面与缝合装置的仓组件之间的最大组织间隙的可调整夹钳高度。
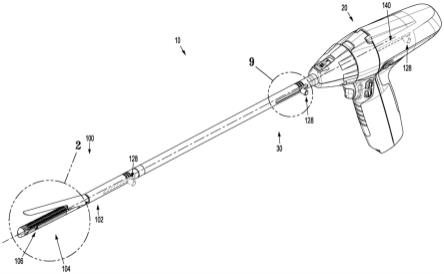
48.图1示出根据本公开的示范性方面的大体上绘示为缝合装置10的外科缝合装置。缝合装置10包含电动手柄组件20、可拆卸地紧固到电动手柄组件20的适配器组件30和可拆卸地紧固到适配器组件30的装载单元100。尽管绘示为个别或可分离部件,但设想可一体地形成任何或所有电动手柄组件20、适配器组件30和装载单元100。
49.如下文将进一步详细描述,外科缝合装置10包含与外科缝合装置10的驱动组件120(图4)啮合的调整机制128。如所绘示,调整机制128可包含支撑于适配器组件30、装载单元100或电动手柄组件20上的调整旋钮128a。
50.图2和图3示出外科缝合装置10的装载单元100的工具组件104。工具组件104可枢转地紧固到装载单元100的主体部分102(图1)且包含具有砧座组件114和仓组件116的钳口组件106。仓组件116包含沟道构件118和收纳于沟道构件118内的钉仓116a。砧座组件114和仓组件116在打开位置(图10)与接近或夹钳位置(图12)之间可相对于彼此枢转。驱动组件120(图4)从装载单元100的主体部分102延伸到工具组件104中,且可平移穿过工具组件104以使得致动钳口组件106以从钉仓116a射击缝钉“s”。
51.装载单元100大体上如美国专利第9,016,539号(“'539专利”)中所描述。因此,将仅在本文中在必需完全公开驱动组件120的方面和其操作方法的情况下描述装载单元100的部件,所述部件与在'539专利中公开的部件共用。
52.工具组件104的钳口组件106的砧座组件114界定沟道151(图10)且包含内部夹钳表面114a。在本公开的某些方面,砧座组件114包含砧座主体150和紧固到砧座主体150的下侧面以形成沟道151的砧座板152(图10)。砧座板152界定多个缝钉收纳凹陷(未绘示)。
53.钳口组件106的钉仓116a包含支撑于仓固持器158、多个缝钉“s”和缝钉发射组件160中的仓主体156。缝钉发射组件160包含致动滑块162(图3)和多个推动器构件164(图3)。沟道构件118界定收纳钉仓116a的空腔119(图3)。更确切地说,钉仓116a的仓主体156利用例如搭扣配合连接件紧固于沟道构件118的空腔119内。涵盖连接件的其他形式且可用于放置搭扣配合连接件,或除此之外,以固定地或可拆卸地将仓组件116紧固于沟道构件118的空腔119内。
54.沟道构件118可枢转地紧固到砧座组件114,且包含界定沟道或狭槽161的内部夹钳表面118a(图10)。仓主体156界定多个横向地间隔的缝钉保留狭槽153,所述狭槽153在钳口组件106处于夹钳位置时与砧座组件114的砧座板152(图10)中的缝钉收纳凹陷(未绘示)对准定位。每一保留狭槽153配置成收纳固定件或缝钉“s”和推动器164。致动滑块162定位于仓组件116的仓主体156内且配置成纵向穿过仓主体156与推动器164啮合以提升仓主体156内的推动器且从仓主体156依序弹射缝钉“s”。致动滑块162支撑包含刀的刀机制166,所述刀在致动滑块162由动态夹钳构件122啮合时凸轮到切割位置中。
55.图4到图7示出缝合装置10(图1)的驱动组件120,所述缝合装置10包含动态夹钳构件122、驱动杆124、调整杆126和紧固机制128。驱动杆124界定纵向轴线且从动态夹钳构件122近侧地延伸到装载单元100的主体部分102中。调整杆126沿着驱动杆124的长度延伸,且由紧固机制128选择性地紧固到驱动杆124。驱动杆124的近侧端配置成啮合适配器组件30和/或电动手柄组件20的驱动构件(未绘示),以用于在适配器组件30和工具组件104内推进和缩回驱动组件120的。突片130(图5)沿着驱动杆124的长度安置且界定第一开口131a、第二开口131b、第三开口131c(共同地,开口131)。在本公开的方面中,开口131中的每一个在横向于驱动杆124的纵向轴线的方向上为椭圆形以在调整杆126相对于驱动杆124纵向地移动时容纳调整杆126相对于驱动杆124的横向移动。尽管绘示为包含三个开口131,但设想驱动杆124可仅包含两个开口或可包含多于三个开口。尽管突片130绘示为形成于驱动杆124上,但设想突片130可改为形成于调整杆126上。如下文将详细地描述,调整杆126和紧固机制128操作为用于调整动态夹钳构件122的夹钳高度“ch”(图6)的机制。
56.在本公开的某些方面中,驱动组件120的驱动杆124和/或调整杆126由多个堆叠片形成,所述堆叠片由例如不锈钢的弹性或柔性材料形成。
57.驱动组件120的动态夹钳构件122包含上部凸缘部分132、下部凸缘部分134和互连上部凸缘部分132与下部凸缘部分134的竖直支柱136。上部凸缘部分132大小和尺寸设置成可滑动地收纳于砧座组件114的沟道151(图10)内且包含啮合砧座组件114的内部夹钳表面114a(图13)以使得仓组件116相对于砧座组件114的枢转将钳口组件106从打开位置移动到夹钳位置的夹钳表面132a(图13)。下部凸缘部分134大小和尺寸设置成可滑动地收纳于沟道构件118的沟道161(图13)内且包含面向动态夹钳构件122的上部凸缘部分132的倾斜表面134a。
58.驱动组件120的调整杆126沿着驱动杆124的长度延伸。调整杆126的近侧部分126a界定用于收纳紧固机制128的开口127。如所绘示,紧固机制128包含调整旋钮128a和螺纹螺钉128b,且开口127配置成紧固地收纳螺纹螺钉128b。尽管绘示为螺纹连接,但设想调整杆126可以任何合适方式相对于驱动杆124紧固。调整杆126中的开口127定位成与驱动杆124的突片130中的开口131中的任一个对准。
59.啮合部分140形成于驱动组件120的调整杆126的远侧端126b上。调整杆126的啮合部分140包含一对延伸部分142,所述延伸部分对142彼此间隔开以形成用于收纳动态夹钳构件122的竖直支柱136的狭槽141。延伸部分142中的每一个包含调整凸缘144,所述调整凸缘144配置成收纳于沟道构件118的沟道161(图10)内且包含夹钳表面144a和相对的倾斜表面144b。调整凸缘144的夹钳表面144a配置成啮合沟道构件118的内部夹钳表面118a(图10)。调整杆126的啮合部分140配置成使得在动态夹钳构件122的竖直支柱136收纳于啮合部分140的狭槽141内时,调整杆126的啮合部分140的调整凸缘144的倾斜表面144b啮合动态夹钳构件122的下部凸缘部分134的倾斜表面134a。动态夹钳构件122的上部凸缘部分132的夹钳表面132a与调整杆126的啮合部分140的调整凸缘144的夹钳表面144a之间的距离界定夹钳高度“ch”(图6)。如下文将进一步详细描述,通过改变驱动组件120的调整杆126相对于驱动组件120的驱动杆124的纵向位置,可调整夹钳高度“ch”。
60.图9到图13示出处于第一配置的缝合装置10(图1)的装载单元100的驱动组件120。在第一配置中,调整杆126相对于驱动杆124在其最远侧位置处纵向地定位,使得调整杆126中的开口127与驱动杆124中的第一开口131a对准。当调整杆126处于最远侧位置时,调整杆126的啮合部分140的调整凸缘144相对于动态夹钳构件122的下部凸缘134定位,使得第一夹钳高度“h”(即,动态夹钳构件122的上部凸缘部分132的夹钳表面132a与调整凸缘144的夹钳表面144a之间的距离)最大。以此方式,当动态夹钳构件122推进时,砧座组件114相对于仓组件116枢转以产生砧座组件114的组织接触表面114b与钳口组件106的仓组件116的组织接触表面116b之间的间隙高度“gh”。
61.图9示出处于第一位置的驱动组件120的紧固机制128。如所绘示,适配器组件30沿着其长度界定狭槽31以用于在缝合装置10的操作期间容纳驱动组件120的紧固机制128的移动。适配器组件30包含沿着狭槽31的标记32以指示调整杆126相对于驱动组件120的驱动杆124的位置。当驱动组件120处于第一配置,其中紧固机制128处于第一位置时,紧固机制128与标记32的最远侧标记对准,从而指示缝合装置10配置成容纳较厚组织。
62.图10示出缝合装置10(图1)的装载单元100的工具组件104的钳口组件106,其中驱动组件120处于第一配置和处于缩回位置。当驱动组件120处于缩回位置时,砧座组件114与仓组件116间隔开(即,处于打开位置)以准许相应砧座组件114的组织接触表面114b、组织
接触表面116b与仓组件116之间的组织放置。
63.图11示出装载单元100的驱动组件120处于第一配置,其中驱动组件120的调整杆126相对于驱动杆124处于其最远侧位置,其中调整杆126中的开口127与驱动构件122中的第一开口131a对准。当驱动组件120处于第一配置时,动态夹钳构件122的上部凸缘部分132的夹钳表面132a与调整杆126的啮合部分140的调整凸缘144的夹钳表面144a之间的距离间隔开以界定第一夹钳高度“ch1”。
64.图12和图13示出缝合装置10的工具组件104的钳口组件106,其中驱动组件120处于第一配置和处于部分推进位置,即,钳口组件106处于夹钳位置的预发射位置。当驱动组件120移动到部分推进位置时,驱动组件120的动态夹钳构件122的上部凸缘部分132在砧座组件114的沟道151中收纳且动态夹钳构件122的上部凸缘部分132的夹钳表面132a与砧座组件114的内部夹钳表面114a啮合使得砧座组件114相对于仓组件116枢转到夹钳位置。当驱动组件120处于第一配置和处于部分推进位置时,砧座组件114和仓组件116的组织接触表面114b、组织接触表面116b分别间隔开以界定第一间隙高度“gh1”。通过钳口组件106将驱动组件120持续推进到推进位置实现如所属领域中已知的组织的缝合(和切割)。
65.图14示出处于第二配置的装载单元100的驱动组件120。更确切地说,驱动组件120的调整杆126相对于驱动组件120的驱动杆124处于其最近侧位置,其中调整杆126中的开口127与驱动构件122中的第三开口131c对准。当驱动组件120处于第二配置时,动态夹钳构件122的上部凸缘部分132的夹钳表面132a与调整杆126的啮合部分140的调整凸缘144的夹钳表面144a间隔开以界定小于第一夹钳高度“ch1”的第二夹钳高度“ch2”。当驱动组件120处于第二配置时,与当驱动组件120处于第一配置时相比,缝合装置10配置成容纳更薄组织。
66.图15和图16示出缝合装置10(图1)的工具组件104的钳口组件106,其中驱动组件120处于第二配置且处于部分推进位置。在部分推进位置中,动态夹钳构件122的上部凸缘部分132在砧座组件114的沟道151中收纳且上部凸缘部分132的夹钳表面132a与砧座组件114的内部夹钳表面114a啮合使得砧座组件114相对于仓组件116枢转到夹钳位置。当驱动组件120处于第二配置且处于部分推进位置时,砧座组件114和仓组件116的组织接触表面114b、组织接触表面116b分别间隔开以界定第二间隙高度“gh2”。驱动组件120穿过钳口组件106的持续推进实现如所属领域中已知的组织的缝合。
67.尽管在调整杆126相对于驱动杆124紧固后夹钳高度“ch”绘示且描述为具有固定距离,但设想调整杆126可在缝合程序期间(即,当驱动组件120推进穿过钳口组件106时)相对于驱动杆124移动以在驱动组件120推进时调整夹钳高度“ch”。可人工或自动调整夹钳高度“ch”。举例来说,在智能缝合器(即,具有传感器的缝合器)中,传感器将感测组织厚度且在发射缝钉时改变组织间隙,且在非智能缝合器中,偏置构件独立于组织间隙高度维持组织上的特定压力。
68.尽管上文绘示且描述的调整机制涉及电动外科缝合器,但本公开的方面可修改以用于手动地致动缝合装置。
69.图17示出根据本公开的示范性方面的大体上绘示为缝合装置10'的人工外科缝合装置。缝合装置10'包含手动手柄组件20',所述手动手柄组件20'包含适配器组件30',和可拆卸地紧固到适配器组件30'的装载单元100'。
70.尽管绘示且描述为与手持式致动机制一起使用,但设想本公开的方面可修改以远
程地使用,即,与机器人系统(未绘示)一起使用。
71.图18和图19示出根据本公开的其他方面的大体上绘示为驱动组件220的驱动组件。驱动组件220类似于上文所描述的驱动组件120且仅在涉及其间的差异时将详细描述。
72.驱动组件220包含动态夹钳组件222、驱动杆224,和调整杆226(图19),所述调整杆226在形成于驱动杆224中的狭槽223内相对于驱动杆224滑动地安置。动态夹钳组件222包含夹钳构件223和下部凸缘构件234。夹钳构件223包含上部凸缘构件232和竖直支柱236。下部凸缘构件234通过楔形榫连接件235(图18)或以任何其他合适方式紧固到夹钳构件223的竖直支柱236。调整杆226以任何合适方式紧固到下部凸缘构件234且操作以沿着驱动组件220的纵向轴线相对于竖直支柱236移动下部凸缘构件234。下部凸缘构件234和竖直支柱236包含邻接倾斜表面234b、倾斜表面236a。下部凸缘构件234相对于竖直支柱236的纵向移动改变夹钳构件223的上部凸缘部分232的夹钳表面232a(图18)与下部凸缘构件234的夹钳表面234a(图18)之间的距离,例如夹钳高度“ch”。
73.如图18和图19中所绘示,驱动组件220处于第一配置,其中调整杆226处于相对于驱动杆224的最远侧位置。当驱动组件220处于第一配置时,夹钳高度“c”为第一距离。如上文所描述的驱动组件120,调整杆226相对于驱动杆224的纵向移动(如由箭头“a”所指示)使下部凸缘构件234的倾斜表面234b相对于竖直支柱的倾斜表面236a移动,使得下部凸缘构件234朝向上部凸缘部分232移动(如由箭头“b”所指示)以调整最小位置与最大位置之间的夹钳高度“ch”(图19)。
74.图20和图21根据本公开的另一方面的示出大体上绘示为动态夹钳组件320的动态夹钳组件。动态夹钳组件320类似于上文所描述的动态夹钳组件222且仅在涉及其间的差异时将详细描述。
75.动态夹钳组件322包含夹钳构件323和下部凸缘构件334。夹钳构件323包含上部凸缘部分332和竖直支柱336。下部凸缘构件334支撑于竖直支柱336中的狭槽325内。更确切地说,下部凸缘构件334可在狭槽325内垂直于动态夹钳组件322的纵向轴线竖直地移动,如由图21中的箭头“c”所指示。以此方式,可通过相对于竖直支柱336升高或降低下部凸缘构件334来调整上部凸缘部分332的夹钳表面332a与下部凸缘构件334的夹钳表面334a之间的距离,例如夹钳高度“ch”。
76.调整构件326(图21)延伸穿过竖直支柱336中的圆柱形通道327且穿过下部凸缘构件334。调整构件326由弹簧构件328(图21)向远侧偏置。调整构件326包含倾斜表面326a,所述倾斜表面326a配置成啮合下部凸缘构件334以响应于调整构件326相对于夹钳构件323的纵向位置的改变而分别改变上部凸缘部分332和下部凸缘构件334的相对位置。
77.插塞构件324将弹簧构件328紧固于圆柱形通道237内。插塞构件324相对于竖直支柱336的纵向移动增加且减小弹簧构件328上的压缩力。通过减小由弹簧构件328提供到调整构件326的偏置力,能够相对于下部凸缘构件334移动调整构件326。举例来说,弹簧构件328上的偏置可由延伸穿过装载单元(例如装载单元100(图1))的螺纹杆(未绘示)实现。螺纹杆在第一方向上的旋转将使得缩回插塞234且因此使弹簧构件328减压,因此允许调整构件326的近侧移动。相反,螺纹杆在第二方向上的旋转将使得推进插塞328,且因此压缩弹簧构件328因此致使调整构件326的远侧移动。
78.当调整构件326处于其最远侧位置时,如图21中所绘示,动态夹钳组件322界定第
一夹钳高度“ch1”。调整构件326缩回(到其最近侧位置如由图21中的箭头“e”所指示)使得下部凸缘构件334从上部凸缘部分332移开,如由图21中的箭头“f”所指示。当调整构件326处于其最近侧位置时(图21,以虚线绘示),动态夹钳组件322界定第二夹钳高度“ch2”。第二夹钳高度“ch2”大于第一夹钳高度“ch1”。通过定位具有与下部凸缘构件334对准的倾斜表面326a的调整构件326,即,在其最近侧位置与最远侧位置之间,调整构件326可定位以在第一夹钳高度“ch1”与第二夹钳高度“ch2”之间产生夹钳高度“ch”。
79.图22和图23示出根据本公开的另一方面的大体上绘示为驱动组件420的驱动组件。驱动组件420包含大体类似于上文所描述的动态夹钳组件322的动态夹钳组件422且仅在涉及其间的差异时将详细描述。
80.动态夹钳组件422包含夹钳构件423和下部凸缘构件434。夹钳构件423包含上部凸缘部分432和竖直支柱436。下部凸缘构件434支撑于竖直支柱436的狭槽425内且可在狭槽425内垂直于动态夹钳组件422的纵向轴线竖直地移动,如由图22中的箭头“g”所指示。以此方式,可通过相对于竖直支柱436升高或降低下部凸缘构件434来调整界定于上部凸缘部分432的夹钳表面432a(图22)与下部凸缘构件434的夹钳表面434a之间的夹钳高度“ch”。
81.调整构件426延伸穿过竖直支柱436中的圆柱形通道427(图22)且穿过下部凸缘构件434。调整杆428a紧固到调整构件426且从调整构件426延伸。调整杆428a沿着平行于从夹钳构件423延伸的驱动杆428的轴线延伸。调整构件426可通过相对于驱动杆428移动调整杆428a来在推进位置(图22)与缩回位置之间移动。
82.调整构件426包含定位成取决于调整构件426相对于夹钳构件423的纵向位置而啮合下部凸缘构件434的倾斜表面426a。当调整构件426处于其最远侧位置时,如图23中所绘示,夹钳高度“ch”为第一距离,且当调整构件426处于其最近侧位置(未绘示)时,夹钳高度“ch”为第二距离。第二距离大于第一距离。通过定位具有与下部凸缘构件434对准的倾斜表面426a的调整构件426,即,在其最近侧位置与最远侧位置之间,可在第一距离与第二距离之间调整夹钳高度“ch”。
83.图24和图25示出根据本公开的另一方面的大体上绘示为动态夹钳组件522的动态夹钳组件。动态夹钳组件522类似于上文所描述的动态夹钳组件322且仅在涉及其间的差异时将详细描述。
84.动态夹钳组件522包含夹钳构件523和下部凸缘构件534。夹钳构件523包含上部凸缘部分532和竖直支柱536。下部凸缘构件534支撑于竖直支柱536的狭槽525内且可在狭槽525内垂直于动态夹钳组件522的纵向轴线竖直地移动。以此方式,可通过相对于竖直支柱536升高或降低下部凸缘构件534来调整界定于上部凸缘部分532的夹钳表面532a(图24)与下部凸缘构件534的夹钳表面534a之间的夹钳高度“ch”。
85.调整构件526延伸穿过竖直支柱536中的圆柱形通道527且穿过下部凸缘构件534。调整构件526包含配置成取决于调整构件526相对于夹钳构件523的纵向位置而啮合下部凸缘构件534的倾斜表面526a。调整构件526可通过螺纹调整连杆528沿着动态夹钳组件522的纵向轴线移动。通过旋转调整连杆528,调整构件526相对于下部凸缘构件534移动。
86.当动态夹钳组件522的调整构件526处于其最远侧位置时,如图25中所绘示,夹钳高度“ch”为第一距离,且当调整构件526处于其最近侧位置(未绘示)时,夹钳高度“ch”为第二距离。第二距离大于第一距离。通过定位具有与下部凸缘构件534对准的倾斜表面526a的
调整构件526,即,在其最近侧位置与最远侧位置之间,可在第一距离与第二距离之间调整夹钳高度“ch”。
87.图26和图27示出根据本公开的另一方面的大体上绘示为动态夹钳组件622的动态夹钳组件。动态夹钳组件622类似于上文所描述的动态夹钳组件322、动态夹钳组件522且仅在涉及其间的差异时将详细描述。
88.动态夹钳组件622包含夹钳构件623和下部凸缘构件634。夹钳构件623包含上部凸缘部分632和竖直支柱636。下部凸缘构件634支撑于竖直支柱636的狭槽625内且可在狭槽625内垂直于动态夹钳组件622的纵向轴线竖直地移动。以此方式,可通过相对于竖直支柱636升高或降低下部凸缘构件634来调整界定于上部凸缘部分632的夹钳表面632a(图26)与下部凸缘构件634的夹钳表面634a(图26)之间的夹钳高度“ch”。
89.调整构件626(图27)延伸穿过竖直支柱636中的圆柱形通道627且穿过下部凸缘构件634。调整构件626包含配置成啮合下部凸缘构件634的倾斜表面634b的圆锥形远侧部分626a。取决于调整构件626相对于夹钳构件623的纵向位置可调整夹钳高度“ch”。调整构件626可通过与夹钳构件623的竖直支柱636螺纹啮合沿着动态夹钳组件622的纵向轴线移动。通过旋转调整构件626,调整构件626相对于下部凸缘构件634移动。
90.当驱动器的调整构件626处于其最远侧位置时,如图27中所绘示,夹钳高度“ch”为第一距离,且当调整构件626处于其最近侧位置(未绘示)时,夹钳高度“ch”为第二距离。第二距离大于第一距离。通过将调整构件626定位在其最近侧位置与最远侧位置之间的任何地方,夹钳高度“ch”可在第一距离与第二距离之间调整。设想调整构件626可操作为用于推进动态夹钳组件622穿过钳口组件的驱动构件,例如钳口组件106(图1)。替代地,动态夹钳组件622可由驱动构件(未绘示)推进。
91.图28和图29示出根据本公开的另一方面的大体上绘示为动态夹钳组件722的动态夹钳组件。动态夹钳组件722类似于上文所描述的动态夹钳组件322、动态夹钳组件522、动态夹钳组件622,且仅在涉及其间的差异时将详细描述。
92.动态夹钳组件722包含夹钳构件723和下部凸缘构件734。夹钳构件723包含上部凸缘部分732和竖直支柱736。下部凸缘构件734支撑于竖直支柱736的狭槽725内且可在狭槽725内竖直地移动,即,垂直于动态夹钳组件722的纵向轴线。以此方式,可通过相对于竖直支柱736升高或降低下部凸缘构件734来调整界定于上部凸缘部分732的夹钳表面732a(图28)与下部凸缘构件734的夹钳表面734a之间的夹钳高度“ch”。
93.调整构件726延伸穿过竖直支柱736中的圆柱形通道727且穿过下部凸缘构件734。调整构件726包含配置成啮合下部凸缘构件734的倾斜表面734b的圆锥形部分726a。取决于调整构件726相对于夹钳构件723的纵向位置可调整夹钳高度“ch”。调整构件726可通过与夹钳构件723的竖直支柱736螺纹啮合(未绘示)来沿着动态夹钳组件722的纵向轴线移动。当调整构件726相对于夹钳构件723处于其最近侧位置(如图29中所绘示)时,夹钳高度“ch”为第一距离,且当调整构件726相对于夹钳构件723处于其最远侧位置(图29,以虚线绘示)时,夹钳高度“ch”一第二距离。第二距离大于第一距离。通过将调整构件726定位在其最近侧位置与最远侧位置之间的任何地方,夹钳高度“ch”可在第一距离与第二距离之间调整。
94.图30和图31示出根据本公开的另一方面的大体上绘示为动态夹钳组件822的动态夹钳组件。动态夹钳组件822类似于上文所描述的动态夹钳组件且仅在涉及其间的差异时
将详细描述。
95.动态夹钳组件822包含夹钳构件823和下部凸缘构件834。夹钳构件823包含上部凸缘部分832和竖直支柱836。下部凸缘构件834支撑于竖直支柱836中的狭槽825内。更确切地说,下部凸缘构件834可在狭槽825内竖直地移动,即,垂直于动态夹钳组件822的纵向轴线。以此方式,可通过相对于竖直支柱836升高或降低下部凸缘构件834来调整界定于上部凸缘部分832的夹钳表面832a(图30)与下部凸缘构件834的夹钳表面834a(图30)之间的夹钳高度“ch”。
96.调整构件826延伸穿过竖直支柱836中的圆柱形通道827且从竖直支柱836中的圆柱形通道827延伸且穿过下部凸缘构件834。调整构件826包含配置成啮合下部凸缘构件834的倾斜表面834b的倾斜表面826a。取决于调整构件826相对于夹钳构件823的纵向位置可调整夹钳高度“ch”。调整构件826可沿着动态夹钳组件822的纵向轴线移动以调整动态夹钳组件822的夹钳高度“ch”。
97.当调整构件826处于其最远侧位置(如图31中所绘示)时,夹钳高度“ch”为第一距离,且当调整构件826处于其最近侧位置(未绘示)时,夹钳高度“ch”为第二距离。第二距离大于第一距离。通过将调整构件826定位在其最近侧位置与最远侧位置之间的任何地方,夹钳高度“ch”可在第一距离与第二距离之间调整。
98.图32到图35示出根据本公开的另一方面的大体上绘示为驱动组件920的驱动组件。驱动组件920大体上类似于上文所描述的驱动组件且仅在涉及其间的差异时将详细描述。
99.驱动组件920包含具有夹钳构件923和下部凸缘构件934的动态夹钳组件922。夹钳构件923包含上部凸缘部分932和竖直支柱936。下部凸缘构件934收纳于竖直支柱936周围且由竖直支柱936支撑,且可相对于竖直支柱936竖直地移动,即,垂直于夹钳构件922的纵向轴线。以此方式,可通过相对于竖直支柱936升高或降低下部凸缘构件934来调整界定于上部凸缘部分932的夹钳表面932a(图30)与下部凸缘构件934的夹钳表面834a(图30)之间的夹钳高度“ch”。
100.调整构件926支撑于由竖直支柱936和下部凸缘构件934界定的圆柱形凹口925内。调整构件926包含凸轮构件926a。取决于调整构件926相对于夹钳构件923的旋转定向,即,凸轮构件926a相对于夹钳构件923的位置,可调整夹钳高度“ch”。调整构件926可围绕其中心轴线旋转以调整动态夹钳组件922的夹钳高度“ch”。
101.当调整构件926通过凸轮构件926a在六点钟位置(如图34中所绘示)处定向时,夹钳高度“ch”为第一距离,且当调整构件926在十二点钟位置(未绘示)处定向时,夹钳高度“ch”为第二距离。第二距离大于第一距离。通过将调整构件926定位在六点钟位置与十二点钟位置之间的任何地方,夹钳高度“ch”可在第一距离与第二距离之间调整。
102.设想可通过相对于驱动组件920驱动杆928移动驱动组件920的调整杆928a来调整凸轮构件926a的定向。此可包含槽形、齿轮或棘轮配置或其它合适的配置。
103.所属领域的技术人员将理解,在本文中特定地描述且在附图中示出的装置和方法为非限制性的示例性方面。设想,在不脱离本公开的范围的情况下,结合示例性方面示出或描述的元件和特征可以与另一示例性方面的元件和特征组合。同样,所属领域的技术人员将基于上文所描述的方面了解本公开的其他特征和优势。因此,除了由所附权利要求指示
之外,本公开不受已经特别示出和描述的内容的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1