一种神经外科手术用脑压板的制作方法
1.本发明涉及手术器械领域,特别涉及一种神经外科手术用脑压板。
背景技术:
2.脑压板是临床上常用的一种手术器械,在开颅手术中用于牵拉脑组织,暴露深部病灶,并为深部显微操作提供良好视野。
3.术中牵拉主要分为持续性和间歇性牵拉两种,持续性牵拉通常是指术中持续不断牵拉脑组织,间歇性牵拉是指反复牵拉及放松脑组织多次。
4.目前临床常用的脑压板的压板部分及手柄部分多为一体的金属片,其压板部分的宽度是固定的,无法满足不同的使用需求,存在适配性差的缺陷,有待改进。
技术实现要素:
5.针对现有技术存在的不足,本发明的目的是提供一种神经外科手术用脑压板,具有高适配性的效果。
6.本发明的上述技术目的是通过以下技术方案得以实现的:一种神经外科手术用脑压板,包括压板部和手柄部,所述压板部包括多个叠摞设置的板体,多个所述板体同轴转动连接于所述手柄部的前端,并且所述手柄部上设置有控制多个所述板体同步转动并呈等分状分布的驱动机构。
7.通过采用上述技术方案,当需要针对不同的创口大小,调整脑压板的使用宽度时,利用驱动机构控制多个叠摞设置的板体同步转动,且保证多个板体的角速度呈递增状增加,从而使多个板体同步展开,且呈等分状分布,以实现脑压板使用宽度的调节,满足不同的使用需求。因此通过设置展开收纳式的脑压板,满足不同大小创口,满足不同的使用需求,提高适配性。
8.本发明在一较佳示例中可以进一步配置为:所述驱动机构包括主动多联齿轮和从动多联齿轮,所述主动多联齿轮上的齿轮直径由上到下呈渐扩状设置,并且所述手柄部的上端面设置有控制所述主动多联齿轮旋转的转轮;所述从动多联齿轮上的齿轮直径由上到下呈减缩状设置,且与所述主动多联齿轮相啮合,同时多个所述板体分别固定于所述从动多联齿轮上的各个齿轮上。
9.通过采用上述技术方案,当控制多个板体展开时,控制转轮带动主动多联齿轮旋转,同时通过啮合控制从动多联齿轮同步旋转。由于主动多联齿轮和从动多联齿轮上的齿轮直径是渐变的,因此能够保证多个板体能够呈等分状分布,满足使用需求。因此通过设置结构简洁,并且操作方便的驱动机构,实现多个板体的便捷展开和便捷收纳的控制,提高使用便捷性。
10.本发明在一较佳示例中可以进一步配置为:所述手柄部的上端面设置有菱形的锁定框,所述锁定框环绕所述转轮,所述锁定框的内侧壁设置有一圈齿键,所述转轮的外壁设置有一圈供所述齿键嵌入的齿槽;所述锁定框靠近所述板体的顶角位置固定于所述手柄部
上,所述锁定框远离所述板体的顶角位置滑动连接于所述手柄部的上端面,同时所述锁定框上设置有供拇指压紧的拉杆。
11.通过采用上述技术方案,当需要控制转轮旋转时,推动拉杆控制锁定框发生形变,并使两侧向外鼓起,使锁定框上的齿键脱离转轮外壁的齿槽,实现转轮的锁定解除。当固定转轮时,松开拉杆,此时在锁定框的弹性作用下,控制锁定框上的齿键嵌入转轮外壁的齿槽内,实现转轮的锁定。同时在脑压板的使用过程中,使用者的手部握持手柄部,此时利用拇指钩紧拉杆,保证转轮的稳定固定,保证脑压板使用时的稳定性。
12.本发明在一较佳示例中可以进一步配置为:所述手柄部呈拱形设置,且背离所述板体的一端向上弯折,并用于压紧手背。
13.通过采用上述技术方案,通过设置独特形状的手柄部,使得手柄部更加贴合人体手部的特征,满足人体工程学原理的应用,从而使得握持手柄部的过程更加舒适。
14.本发明在一较佳示例中可以进一步配置为:所述拉杆包括转轴和辊筒,所述转轴竖直设置于所述锁定框的上端面,所述辊筒转动连接于所述转轴的外壁。
15.通过采用上述技术方案,当使用者的拇指长时间钩紧拉杆时,使用者的拇指可以往复运动,以用于缓解拇指长时间握持过程中的酸痛感,使得脑压板的使用过程更加舒适。
16.本发明在一较佳示例中可以进一步配置为:所述手柄部的其中一侧设置有供四指嵌入的凹槽,所述凹槽内设置有圆弧状的活动板,所述活动板的背侧设置有滑动连接于所述手柄部的活动杆,并且所述活动杆的外壁套设有位于所述活动板和所述凹槽底壁之间的弹簧。
17.通过采用上述技术方案,当使用者的四指长时间握持手柄部时,利用四指控制活动板以及活动杆同步运动,并在弹簧的配合作用下,控制活动板以及活动杆自动复位。因此能够缓解四指长时间握持过程中的酸痛感,使得脑压板的使用过程更加舒适。
18.本发明在一较佳示例中可以进一步配置为:所述板体背离所述手柄部的一端呈向下弯折状形成卡钩。
19.通过采用上述技术方案,通过在板体的端部设置弯折的卡钩,便于板体钩紧创口位置,从而提高脑压板的使用便捷性。
20.综上所述,本发明具有以下有益效果:
21.1.通过设置展开收纳式的脑压板,满足不同大小创口,满足不同的使用需求,提高适配性;
22.2.通过采用单手握持的方式固定脑压板,同时利用拇指钩紧拉杆,保证转轮的稳定固定,保证脑压板使用时的稳定性;
23.3.通过设置独特结构的拉杆和手柄部,缓解拇指和四指长时间握持过程中的酸痛感,使得脑压板的使用过程更加舒适。
附图说明
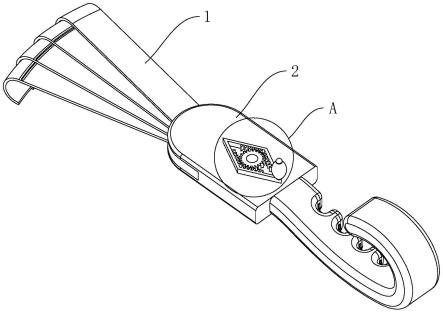
24.图1是实施例的结构示意图;
25.图2是实施例的背部结构示意图;
26.图3是实施例的压板部的结构示意图;
27.图4是实施例的驱动机构的结构示意图;
28.图5是图1中的a处的局部放大图;
29.图6是实施例的活动板的结构示意图。
30.附图标记:1、压板部;11、板体;12、限位块;13、限位槽;14、卡钩;2、手柄部;21、凹槽;22、活动板;23、活动杆;24、弹簧;3、驱动机构;31、主动多联齿轮;32、从动多联齿轮;33、转轮;34、齿槽;4、锁定框;41、齿键;5、拉杆;51、转轴;52、辊筒。
具体实施方式
31.以下结合附图对本发明作进一步详细说明。
32.参见图1,一种神经外科手术用脑压板,包括压板部1和手柄部2。压板部1用于对创口进行牵拉,暴露深部病灶,为深部显微操作提供良好视野。手柄部2用于供手部握持,满足脑压板的稳定牵拉。
33.参见图1、图2,压板部1包括多个叠摞设置的板体11,每个板体11的两侧相平齐,多个板体11同轴转动连接于手柄部2的前端,并且手柄部2上设置有控制多个板体11同步转动并呈等分状分布的驱动机构3。
34.参见图2、图3,每个板体11的一侧设置有限位块12,且另一侧设置有供限位块12滑移的弧形的限位槽13,以用于限制板体11的旋转角度,并保证多个板体11旋转至最大角度时,若干个板体11之间不会存在空隙。
35.进一步的,如图1所示,按图1方向最上方的板体11只有限位块12,没有限位槽13。最下方的板体11只有限位槽13,没有限位块12。这一情景为进一步优选的结果,本技术应当保护且涵盖这一情景。
36.参见图2、图3,板体11背离手柄部2的一端呈向下弯折状形成卡钩14,卡钩14用于钩紧创口,并实现创口位置的牵拉。同时多个板体11展开后,多个卡钩14的尖端位置呈圆弧过渡状设置(详见图2)。
37.当使用脑压板时,先根据创口的大小调整压板部1的宽度,当调整压板部1的使用宽度时,利用驱动机构3控制多个叠摞设置的板体11同步转动,且保证多个板体11的角速度呈递增状增加。
38.与此同时,多个板体11同步展开,且呈等分状分布,以实现脑压板使用宽度的调节。最后再利用板体11上形成的卡钩14钩紧创口,对创口进行牵拉,满足手术的需求。
39.参见图3、图4,驱动机构3包括主动多联齿轮31和从动多联齿轮32,主动多联齿轮31和从动多联齿轮32均转动连接于手柄部2。其中主动多联齿轮31上的齿轮直径由上到下呈渐扩状设置,并且手柄部2的上端面设置有控制主动多联齿轮31旋转的转轮33。
40.参见图3、图4,从动多联齿轮32上的齿轮直径由上到下呈减缩状设置,且与主动多联齿轮31相啮合,同时多个板体11远离卡钩14的一端分别固定于从动多联齿轮32上的各个齿轮上。
41.当控制多个板体11展开时,控制转轮33带动主动多联齿轮31旋转,同时通过啮合关系控制从动多联齿轮32同步旋转。由于主动多联齿轮31和从动多联齿轮32上的齿轮直径是渐变的,因此在主动多联齿轮31和从动多联齿轮32旋转时,由上至下的板体11旋转速度逐渐减低,且线速度逐渐缩小。因此在主动多联齿轮31和从动多联齿轮32旋转时,能够保证多个板体11能够呈等分状分布,满足使用需求。
42.参见图4、图5,手柄部2的上端面设置有菱形的锁定框4,锁定框4环绕转轮33。锁定框4的内侧壁设置有一圈齿键41,转轮33的外壁设置有一圈供齿键41嵌入的齿槽34。
43.参见图4、图5,锁定框4靠近板体11的顶角位置(即锁定框4靠近板体11的一端)固定于手柄部2上,锁定框4远离板体11的顶角位置(即锁定框4远离板体11的一端)滑动连接于手柄部2的上端面,同时锁定框4上设置有供拇指压紧的拉杆5。
44.当需要控制转轮33旋转时,推动拉杆5控制锁定框4发生形变,并使两侧向外鼓起,使锁定框4上的齿键41脱离转轮33外壁的齿槽34,实现转轮33的锁定解除。当固定转轮33时,松开拉杆5,此时在锁定框4的弹性作用下,控制锁定框4上的齿键41嵌入转轮33外壁的齿槽34内,实现转轮33的锁定。
45.与此同时,在脑压板的使用过程中,使用者的四指以及手掌共同握持手柄部2。此时利用拇指钩紧拉杆5,即保证转轮33的稳定固定,保证脑压板使用时的稳定性,又能为拇指提供放置空间和位置。
46.参见图1、图5,手柄部2的一端呈拱形设置,且背离板体11的一端向上弯折(如图1所示),并用于压紧手背。拉杆5包括转轴51和辊筒52,转轴51竖直设置于锁定框4的上端面,辊筒52转动连接于转轴51的外壁。
47.参见图1、图6,手柄部2的其中一侧设置有供四指嵌入的凹槽21,凹槽21内设置有圆弧状的活动板22。活动板22的背侧设置有滑动连接于手柄部2的活动杆23,活动杆23的外壁套设有位于活动板22和凹槽21底壁之间的弹簧24。
48.当握持手柄部2时,手掌贴合手柄部2的拱形位置,同时手柄部2的后端压紧手背部,对手部进行固定。与此同时,使用者的四指嵌入手柄上的凹槽21内,并且拇指搭放在拉杆5外壁的辊筒52上(即拇指搭放在靠近板体11的辊筒52一侧)。
49.因此通过设置独特形状的手柄部2,使得手柄部2能够更加贴合人体手部的特征,满足人体工程学原理的应用,从而使得握持手柄部2的过程更加舒适,提高使用过程中的舒适度。
50.由于部分手术需要长时间进行,因此一直握持手柄部2的双手很容易出现酸痛现象。此时使用者的拇指可以往复运动,以用于缓解拇指长时间握持过程中的酸痛感。同时还可以利用四指控制活动板22以及活动杆23同步运动,并在弹簧24的配合作用下,控制活动板22以及活动杆23自动复位,缓解四指长时间握持过程中的酸痛感。
51.具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1