模块化手术器械系统和基于柄的牵开和牵引的方法与流程
1.本技术一般涉及使用模块化牵开器刀片和牵引器来同时提供牵开和牵引以用于微型开放式经椎间孔腰椎椎间融合(tlif)脊柱手术的系统和方法。
背景技术:
2.脊柱病症可能导致疼痛、神经损伤和活动能力丧失。虽然非手术治疗可能对治疗某些脊柱病症有效,但其他治疗将需要手术治疗,例如但不限于脊柱融合术。在进行微型开放式经椎间孔腰椎椎间融合(tlif)脊柱手术期间,可以从中线切开一个切口以进入椎间盘间隙和椎弓根。其他脊柱手术可能会将切口放置在不同的位置。使用各种工具用刀片进行牵开,以通过切口暴露一部分脊柱或骨结构。其他仪器用于牵引。这些不同器械的互换可能会增加执行手术所需的时间长度。本公开描述了针对解决上述问题和/或其他问题的方法和系统。
技术实现要素:
3.本公开的技术通常涉及,例如,使用模块化牵开器刀片和牵引器来提供牵开和/或牵引的模块化手术器械系统,牵开和牵引可以同时提供以用于例如开放式、微型开放式经椎间孔腰椎椎间融合(tlif)脊柱手术,或其他适用的程序。
4.在一个方面,本公开提供了一种包括至少一个牵开器刀片的手术装置。每个牵开器刀片可包括刀片主体,该刀片主体具有外侧、与外侧相对的内侧以及底端。底端可包括倒拱弯曲。倒拱弯曲可以包括接近刀片主体的中线的最低点。每个牵引器刀片可以包括集成到刀片主体内侧上的中间部分的连接器。连接器可以包括腿接口,该腿接口被配置为与牵引器的腿配合。
5.在另一个方面,本公开提供了一种模块化手术器械系统,其可以包括具有第一和第二平行臂的内侧-外侧牵引器齿条工具。模块化手术器械系统可以包括连接到第一和第二平行臂的第一和第二腿对接构件。模块化手术器械系统可以包括第一牵引器,该第一牵引器具有被配置为与第一腿对接构件对接的第一牵引器腿。模块化手术器械系统可以包括第二牵引器,该第二牵引器具有被配置为与第二腿对接构件对接的第二牵引器腿。模块化手术器械系统可以包括牵开器刀片对。刀片对的每个牵开器刀片包括刀片主体,该刀片主体具有外侧、与外侧相对的内侧以及底端。底端可包括倒拱弯曲。倒拱弯曲可以包括接近刀片主体的中线的最低点。每个刀片可以包括集成到刀片主体内侧上的中间部分的连接器。连接器可以包括腿接口,该腿接口被配置为与第一牵引器腿或第二牵引器腿配合。
6.在另一方面,本公开提供了一种方法,该方法可以包括提供模块化手术器械系统和将骨紧固件的柄驱动到椎弓根中。该方法可以包括在牵引器的牵引器腿上滑动牵开器刀片以将牵开器刀片和牵引器配对在一起并且将牵引器原位附接至骨紧固件的柄。该方法可以包括将内侧-外侧牵引器齿条工具连接到牵引器腿以组装系统并且使用配对的牵开器刀片和牵引器通过组装的系统来执行牵引和牵开。
是相对的,并且仅用于上下文中,并且不必为“较高”和“较低”。
25.进一步地,如说明书中所用,并且包含所附权利要求书,疾病或病状的“治疗(treating/treatment)”是指执行手术,所述手术可以包含向患者(人,正常人或非正常人,或其它哺乳动物)施用一种或多种药物、采用可植入装置和/或采用治疗疾病的器械,例如用于移除凸出部分或椎间盘突出和/或骨刺的微型椎间盘切除器械,以努力缓解疾病或病状的体征或症状。缓解可以在疾病或病状的体征或症状出现之前以及其出现之后发生。因此,治疗包含防止疾病或不良病况(例如,在可能易患所述疾病但尚未诊断患有所述疾病的患者中防止所述疾病发生)。此外,治疗不需要完全缓解病征或症状,不需要治愈,并且特别包含对患者仅有边际效应的手术。治疗可包含抑制疾病,例如遏制其发展,或缓解疾病,例如造成病退。例如,治疗可包括减轻急性或慢性炎症;缓解疼痛及减少和诱导新韧带、骨骼和其他组织的再生长;作为手术的辅助;和/或任何修复手术。此外,如在说明书中使用并且包含所附权利要求书,术语“组织”包含软组织、韧带、腱、软骨和/或骨,除非另有特别说明。
26.以下讨论包括根据本公开的原理的模块化手术器械系统和相关组件以及使用模块化手术器械系统的方法的描述,该模块化手术器械系统包括至少一个模块化手术装置。还公开了替代实施例。详细地参考本公开的示例性实施例,这些实施例在附图中示出。
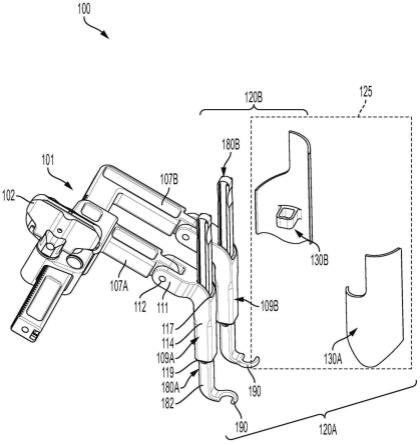
27.转到图1a,显示了示出基于柄的牵开和牵引的模块化手术器械系统100的组件的透视图,牵引刀片分开。图1b是示出了模块化手术器械系统100的组件的后视图。
28.系统100的组件可由适合于医疗应用的生物可接受的材料制造,所述材料包括金属、合成聚合物、陶瓷和骨材料和/或其复合材料。例如,单独地或共同地,系统100的组件可以由如不锈钢合金、铝、工业纯钛、钛合金、5级钛、超弹性钛合金、钴-铬合金、不锈钢合金、超弹性金属合金(例如,镍钛诺、超弹性塑料金属,如由日本丰田材料公司制造的gum)、陶瓷及其复合材料,如磷酸钙(例如,生物有限公司(biologic inc.)制造的skelitetm)、热塑性塑料,如聚芳醚酮(paek),包含聚醚醚酮(peek)、聚醚酮酮(pekk)和聚醚酮(pek)、碳-peek复合材料、peek-baso4聚合物橡胶、聚对苯二甲酸乙二醇酯(pet)、织物、硅树脂、聚氨酯、硅树脂-聚氨酯共聚物、聚合物橡胶、聚烯烃橡胶、水凝胶、半刚性和刚性材料、弹性体、橡胶、热塑性弹性体、热固性弹性体、弹性体复合材料、刚性聚合物,包含聚亚苯基、聚酰胺、聚酰亚胺、聚醚酰亚胺、聚乙烯、环氧树脂、骨材料,包含自体移植、同种异体移植、异种移植或转基因皮质和/或皮质松质骨,以及组织生长或分化因子、部分可再吸收的材料,例如,金属和钙基陶瓷复合材料、peek和钙基陶瓷的复合材料、peek与可再吸收聚合物的复合材料、完全可再吸收的材料,例如钙基陶瓷,如磷酸钙、磷酸三钙(tcp)、羟基磷灰石(ha)-tcp、硫酸钙或其它可再吸收的聚合物,如聚酮(polyaetide)、聚乙交酯、聚酪氨酸碳酸酯、聚己内酯(polycaroplaetohe)及其组合等材料制成。
29.系统100的各种组件可以具有包括以上材料的材料复合物,以实现如强度、刚度、弹性、顺从性、生物力学性能、耐久性和射线可透性或成像偏好等各种期望特性。单独地或共同地,系统100的组件也可以由异质材料制成,例如上述材料中的两种或更多种的组合。系统100的组件可以整体地形成,一体地连接或包括紧固元件和/或器械,如本文所描述。
30.例如,系统100可以与开放或微开放、最小进入和/或包括经皮手术技术的微创一起使用。在一个实施例中,系统100的组件被配置成牵引和/或牵开以固定骨紧固件,如椎弓根螺钉,用于手术治疗,以治疗如本文所描述的那些脊柱病理等各种脊柱病理。系统100可
以被配置成在脊椎手术期间在牵开筋膜和/或肌肉的同时在椎间盘间隙中产生牵引。
31.骨紧固件可包括限定植入腔的头部和被配置成用于穿透组织的穿透部分或柄。如在本公开中使用的,基于柄的牵开可以涉及例如向(例如,与骨紧固件相关联的)柄或轴施加力,或者可以进一步涉及其他柱、轴、柄或套筒或植入或嵌入脊柱或其他骨结构的一部分中的其他延伸部分。骨紧固件可以涂有诸如羟基磷灰石等骨传导材料和/或诸如骨形态发生蛋白等骨诱导剂以增强骨固定。骨紧固件可由射线可透过的材料如聚合物制成。可以包括放射性标记物用于在x射线、荧光透视、ct或其它成像技术下进行识别。可以使用金属或陶瓷放射标记物,例如钽珠、钽针、钛针、钛端盖和铂丝。
32.经考虑,本公开可用于其它骨和骨相关应用,包括与诊断和治疗相关的应用。进一步经考虑,所公开的手术系统可替代地用于患者处于俯卧或仰卧位置的手术治疗中,和/或对脊柱采用各种手术方法,包括前路、后路、后正中入路、外侧入路、后外侧入路和/或前外侧入路,以及在其它身体区域。本公开还可以替代地与用于治疗脊柱的胸段、腰段、骶段、颈段和骨盆段的程序一起使用。本公开的系统100也可用于动物、模拟脊骨模型或其他非生命基底,例如但不限于用于测试和训练。
33.系统100将结合图1a-1b和图2a和2b进行描述。图2a-2b是说明模块化手术器械系统100的组件的外侧视图和内侧视图。模块化手术器械系统100可以包括具有第一和第二平行臂107a、107b的内侧-外侧牵引器齿条工具101。系统100可以包括连接到第一和第二平行臂107a、107b的第一和第二腿对接构件109a、109b。
34.内侧-外侧牵引器齿条工具101可包括旋钮102,该旋钮可被配置为顺时针或逆时针旋转。沿第一方向旋转旋钮102可以关闭工具101,使得第一和第二平行臂107a、107b之间的间距减小。作为非限制性示例,第一方向可以是顺时针方向。或者,沿第二方向旋转旋钮102可以打开工具101,使得第一和第二平行臂107a、107b之间的间距增加。作为非限制性示例,第二方向可以是逆时针方向。
35.内侧-外侧牵引器齿条工具101可以包括与第一和第二平行臂107a、107b接口连接的一排齿104(图1b),使得当旋钮102沿第二方向旋转时,至少一个臂相对于另一臂移动以增加臂107a、107b之间的距离。用于牵开的示例齿条工具在转让给华沙外科整形股份有限公司(warsaw orthopedic,inc.)的题为“surgical retractor and method of use[手术牵开器及其用途]”的美国专利申请公开2014/0024900中进行了描述,该专利申请的全部内容并入本文。用于牵开的另一种示例齿条工具在授予华沙外科整形股份有限公司的题为“tissue massage retractor[组织按摩牵开器]”的美国专利申请公开2011/0098537中进行了描述,该专利申请的全部内容并入本文。另一种用于牵开的齿条工具在转让给华沙外科整形股份有限公司的题为“instruments and methods for minimally invasive tissue retraction and surgery[用于微创组织牵开和手术的仪器和方法]”的美国专利7,976,463中进行了描述,该专利的全部内容通过引用并入本文。用于牵开的齿条工具还在转让给sdgi控股股份有限公司(sdgi holding,inc.)的题为“instruments and methods for minimally invasive tissue retraction and surgery[用于微创组织牵开和手术的仪器和方法]”的美国专利6,945,933中进行了描述,该专利的全部内容通过引用并入本文。
[0036]
由于第一和第二腿对接构件109a、109b中的每一个基本上相同,因此将仅描述一个腿对接构件109a。腿对接构件109a可以包括轭111和连接销112,该连接销被配置为连接
到相应的一个臂107a。腿对接构件109b的轭111可以被配置成连接到臂107b。第一腿对接构件109a可以包括中空管状构件114,该中空管状构件具有与轭111一体形成的第一端117和第二端119。第二端119与第一端117相对。轭111可以相对于中空管状构件114的第一端117成角度布置。中空管状构件114和轭111之间的角度可以是90
°
或者是可以小于180
°
的钝角。
[0037]
系统100可以至少包括模块化手术装置120a、120b。模块化手术装置120a可以包括可以是独立牵开器刀片的牵开器刀片130a。模块化手术装置120a可以包括牵引器180a。独立牵开器刀片130a可以与牵引器180a配对以形成牵开器刀片和牵引器对。牵开器刀片130a可以与牵引器180a配对,其中连接器137集成到刀片130a的内侧。系统100可包括第二模块化手术装置120b,其可包括牵开器130b和牵引器180b。牵开器刀片130b可以与牵引器180b配对,其中连接器137集成到刀片130b的内侧。
[0038]
在各种实施例中,牵引器180a和180b可以基本上相同。因此,将结合图5提供附加牵引器细节仅详细描述一个牵引器180a。具体参照图1a和1b,牵引器180a可以包括牵引器腿182和钩190。腿182可以被配置为与第一腿对接构件109a对接。牵引器180b的牵引器腿182可以配置为与第二腿对接构件109b对接。这种对接可以在机器人系统的帮助下和/或在手术导航技术的帮助下进行。系统100可以包括多个牵引器,可以选择这些牵引器以在脊柱手术期间帮助牵引。作为非限制性示例,牵引器可以具有不同的钩类型,如将结合图5-6更详细地描述的。牵引器腿182具有纵向轴线la(图1b)。
[0039]
在各种实施例中,系统100可包括多个不同尺寸的独立牵开器刀片,可选择这些牵开器刀片以用于与牵引器配对。例如,牵开器刀片可以具有不同的纵向长度、直径或厚度。在各种实施例中,多个独立的牵开器刀片可以包括用虚线框表示的牵开器刀片对125。
[0040]
图3a是安装在第一和第二腿对接构件109a、109b中的模块化手术装置120a、120b的俯视图。图3b是安装在第一和第二腿对接构件109a、109b中的模块化手术装置120a、120b的仰视图。第一和第二腿对接构件109a、109b被示为附接到臂107a、107b。牵开器刀片对125可包括第一牵开器刀片130a和作为第一牵开器刀片130a的镜像的第二牵开器刀片130b。系统100可以被配置为将第一牵开器刀片130a和第二牵开器刀片130b的内侧定位为彼此面对。牵引器180a、180b的钩190可以具有开口199,该开口可以在朝向牵开器刀片内侧的方向上打开。另外,钩190可以在刀片前侧的方向上偏移。在本公开中,术语刀片的“前侧”是指安装时离工具101最远的方向。将结合图4a-4d更详细地描述牵开器刀片。
[0041]
现在参考图4a-4d,将描述牵开器刀片430。具体来说,图4a是示出牵开器刀片430的后视图。图4b是示出图4a的牵开器刀片430的底端视图。图4c是示出图4a的牵开器刀片430的第一(外)侧透视图。图4d是示出图4a的牵开器刀片430的第二(内)侧透视图。每个牵开器刀片430(即,牵开器刀片130a或130b)可包括具有外侧434和与外侧434相对的内侧436的刀片主体432。刀片主体432可包括具有倒拱弯曲445的底端440,如图4d中最佳所示。倒拱弯曲445上的最低点可以位于或接近刀片主体432的中心c或中线。在一些实施例中,倒拱弯曲445可以是子弹头弯曲。倒拱弯曲445或子弹头弯曲可以帮助外科医生放置到切口中。每个牵开器刀片430可以包括连接器437(即,图2b的连接器137),该连接器集成到刀片主体432的内侧436的中间部分。连接器437可以包括腿接口438,该腿接口可以被配置为与牵引器180的腿182配合,如图2b中最佳所示。
[0042]
仍然参考图4a-4d,刀片主体432可包括第一主体部分402和第二主体部分404。第
7b示出将相应的一个牵开器刀片730与相应的一个牵引器780配对的步骤。以虚线显示的突起752可以容纳在腿782的引导通道792中。突起752可以向下或沿着引导通道792滑动到引导通道端部(未示出)。这可以将钩790定向在低于或接近倒拱弯曲745的最低点的平面处并沿着朝向第一主体部分402(图4c-4d)的底端414(图4c-4d)的方向上)。腿接口(即,连接器737)可以是对接停止构件,以停止中空管状构件714的对接运动,该中空管状构件被对接到牵引器780的腿782上。
[0050]
图8是说明利用图1a的系统100牵开和牵引的方法800的流程图。将结合图1a-1b和7a-7d来描述方法800。可以按所示顺序或不同顺序执行方法步骤。可以同时执行一个或多个步骤。此外,可以在迭代中添加或省略一个或多个步骤。系统100用于治疗脊柱的应用的一个示例在美国美敦力公司(medtronic safemor danek usa,inc.)的“mast 单侧和双侧技术”中进行了描述,版权日期为2006年,其全部内容通过引用并入本文。
[0051]
在801,方法800可以包括提供和/或使用系统100。在802,可以测量患者的解剖结构,例如脊柱或脊柱的结骨骼构的部分。在一些实施例中,可以使用与患者的身高和体重相关联的测量。脊柱或骨结构的测量可以使用医学成像设备进行,例如但不限于磁共振成像(mri)设备、电磁辐射设备或x射线设备、计算机断层(ct)扫描设备和/或手动手术测量工具。在804,可以选择用于患者解剖结构的尺寸的刀片。步骤801、802和804的顺序可以改变。步骤802可以在手术期间或作为术前测试和/或测量来执行。在一些实施例中,在804处选择刀片可以在手术期间或在手术计划阶段期间执行。
[0052]
在806,方法800可以包括驱动骨紧固件的柄进入(第一)椎弓根中。在一些实施例中,骨紧固件的植入可能已经使用不同的手术或相同的手术和其他手术工具进行,例如但不限于美国美敦力公司(medtronic safemor danek usa,inc.)的“mast 单侧和双侧技术”中描述的那些,版权日期为2006年。在808,方法800可包括滑动牵开器刀片730或在牵开器780的牵开器腿782上滑动该牵开器刀片以将牵开器刀片730和牵引器780配对在一起,如在图7a-7b中最佳可见。在808,在牵开器腿182上滑动牵开器刀片130以将牵开器刀片130和牵引器180配对在一起可以包括将牵开器钩790定向在低于或接近牵开器刀片730的倒拱弯曲的最低点的平面处,如图7b中最佳所示。
[0053]
在810,方法800可以包括将牵引器780原位附接至骨紧固件的柄。在812,方法800可以包括将内侧-外侧牵引器齿条工具101(图1a-1b)附接到牵引器腿782以组装系统100,如图7c-7d最佳所示。在812,附接内侧-外侧牵引器齿条工具101可以包括将内侧-外侧牵引器齿条工具101的腿对接构件709对接至牵引器腿782,如图7c-7d所示。
[0054]
在816,方法800可以包括使用配对的牵开器刀片730和牵引器780通过组装的系统100执行牵引和牵开。可以使用模块化手术装置120a(图1a-1b),其具有用于基于柄的牵开和牵引的牵引刀片和牵引器对,以及可以在脊柱手术期间牵开筋膜和/或肌肉的同时在椎盘间隙中产生牵引的相关使用方法。
[0055]
系统100可包括需要配对和附接到工具101的第二牵开器刀片(即,130b)和第二牵引器(即,180b)对。因此,例如,可以重复步骤806、808、810和812。该方法可以包括使用另一个骨紧固件。
[0056]
在814,可以确定系统100的组装是否完成。如果确定为“是”,则方法800继续到步
骤816。如果确定为“否”,则方法800可以包括在806,使用要被驱动到第二椎弓根中的第二骨紧固件或脊柱的接近第一椎弓根的骨结构的一部分来重复步骤806、808、810和812。在这种情况下,在808,方法800可以包括以与结合图7a-7b所述和所示相同的方式在第二牵引器180b的第二牵引器腿182上滑动第二牵开器刀片130b以将第二牵开器刀片130b和第二牵引器180b配对。在各种实施例中,在808,在第二牵开器腿182上滑动第二牵开器刀片130b以将第二牵开器刀片130b和第二牵引器180b配对在一起可以包括将牵开器钩190定向在低于或接近牵开器刀片130b的倒拱弯曲的最低点的平面处,如图7b中最佳所示。
[0057]
在810,方法800可以包括将第二牵引器180b原位附接至第二骨紧固件的第二柄。在812,方法800可以包括以与结合图7c-7d所述和所示相似的方式将内侧-外侧牵引器齿条工具101附接到第二牵引器腿182来组装系统100。在816,方法800可包括使用配对的第二牵开器刀片130和第二牵引器180通过组装的系统100来执行牵引和牵开。
[0058]
在各种实施例中,在812,将内侧-外侧牵引器齿条工具101附接到第二牵引器腿182上可以包括以与关于图7c-7d所述和所示类似的方式将内侧-外侧牵引器齿条工具101的第二腿对接构件109b对接至第二牵引器腿182。
[0059]
应当理解,本文公开的各个方面可以与说明书和附图中具体呈现的组合不同的组合进行组合。还应当理解,根据实例,本文所描述的任何过程或方法的动作或事件可以以不同顺序执行,可以添加、合并或完全排除(例如,所有描述的动作和事件对于执行技术可能不是必需的)。另外,尽管为了清楚起见,将本公开的某些方面描述为由单个模块或单元来执行,但是应当理解,本公开的技术可以由与例如医疗装置相关联的单元或模块的组合来执行。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1