急救系统、控制方法、及计算机可读取的存储介质与流程
1.本发明涉及一种急救系统、急救系统控制方法以及计算机可读取的存储介质。
背景技术:
2.期望一种系统,携带自动监控/发送用户的生物信息的装置,能够判别身体健康的异常度并根据需要而通知给第三者以请求急救。作为此种系统,提出有一种使用电话或国际互联网的急救辅助系统,其对基于由用户携带的移动终端所获取的用户的生物信息来判别并通知用户的身体健康的异常度的急救进行辅助(例如参照专利文献1)。
3.专利文献1所记载的急救辅助系统中,用户终端装置包括:生物信息检测部,检测用户的生物信息;用户终端位置检测部,测定表示所述用户终端装置的位置的用户位置信息;以及救生信息通信部,将包含生物信息和用户位置信息的救生信息发送至急救辅助装置。而且,第三者终端装置包括:第三者终端位置检测部,测定第三者终端装置的位置信息;以及第三者终端救生信息收发部,将包含第三者终端装置的第三者终端位置信息的第三者终端信息定期地发送至急救辅助装置,并且接收来自急救辅助装置的救生指示信息。而且,急救辅助装置包括:救生信息收发部,接收救生信息和第三者终端信息,并且将救生指示信息发送至第三者终端装置;紧急性判断部,根据救生信息来判定急救的紧急性并输出紧急性信息;位置信息分析部,根据救生信息与第三者终端位置信息,对位于用户的当前位置附近的第三者的位置关系进行分析,并输出用户终端装置与第三者终端装置之间的距离信息;数据库,与多个第三者终端装置分别对应地记录用户的生物信息的历史、距离信息及第三者的属性信息;以及通知者判断部,将紧急性信息、距离信息及第三者的属性信息作为输入而确定发送救生指示信息的第三者终端装置。
4.提出有一种急救辅助系统(例如参照专利文献1),基于通过利用者(用户)所携带的移动终端所获取的用户的生物信息,来辅助对用户的身体健康的异常度进行判别、通知的急救。专利文献1所记载的技术中,使用用户所持有的移动电话。而且,在急救时,也有急救队等通过视频电话等来与旁观者(正好在救急现场的人)进行对话的方法。例如,专利文献1所记载的技术中,例如在第三者终端带有视频电话功能的情况下,急救辅助装置侧能够与第三者终端进行视频电话。
5.提出有一种可远程操作的机器人系统(例如参照专利文献2),在远离可进行医疗行为的救生医疗中心等场所的地区,能够进行应急处置,而且能够将患者迅速送交到医疗侧。专利文献2所记载的机器人装置是由位于机器人装置附近的人进行机器人装置的行走、蛇行,以使其移动到患者所处的场所。而且,专利文献1所记载的机器人系统包含:机器人远程控制装置本体,生成并发送控制数据;图像/语音远程控制装置,进行图像数据或语音数据的收发;以及生物信息远程控制装置,接收生物信息。
6.另外,近年来,正在推进自动体外除颤仪(automated external defibrillator,aed)在各处的设置。对于aed而言,即便不是急救人员等专业人员,普通的市民也能够操作。因此,普通市民使用aed来救护患者的案例正在增加。由于设置aed的场所有限,因此一旦不
知晓aed的所在地,寻找aed耗费时间,还有可能错过救生。因此,提出一种系统(例如参照专利文献3),向遇到急病患者而拨打了“119”的通报者询问急病患者的状况,如果需要aed,则将aed所在信息发送给通报者。
7.提出有一种交通信号器控制装置(例如参照专利文献4),能够使紧急车辆更快且安全地到达目的地,并且能够尽可能抑制交通堵塞的发生,从而能够实现两者的平衡。
8.而且,提出有一种救急系统(例如参照专利文献5),能够更准确地判断运送对象者的必要性。
9.专利文献4所记载的交通信号器控制装置包括:接收部件,接收从紧急车辆发送的车辆信息;识别部件,基于由接收部件所接收的车辆信息来识别紧急车辆的种类;设定部件,基于由识别部件所识别的紧急车辆的种类,来设定对交通信号器的显示进行控制的时间;以及控制部件,对应于由设定部件所设定的时间来控制交通信号器的显示。
10.专利文献5所记载的救急系统包括:第一显示控制部件,显示从预先规定的多个症状项目中选择一个以上的症状项目的画面;第一存储部件,存储询问内容,所述询问内容是对多个症状项目分别设定,且关于各症状项目所表示的症状而包含询问量的定量询问、询问性质的定性询问与询问时间的时间询问;第二显示控制部件,从第一存储部件中读出对在由第一显示控制部件所显示的画面中所选择的症状项目设定的定量询问、定性询问以及时间询问的询问内容,并依次进行画面显示;症状结果判断部件,根据在由第二显示控制部件依次显示的画面上所输入的、针对各症状项目的询问内容的回答结果,来判断每个症状的结果;以及运送判断部件,根据由症状结果判断部件所判断的每个症状的结果,来判断是否需要运送对象者。
11.现有技术文献
12.专利文献
13.专利文献1:日本专利第5705621号公报
14.专利文献2:日本专利特开2006-326229号公报
15.专利文献3:日本专利特开2009-224967号公报
16.专利文献4:日本专利特开2002-042291号公报
17.专利文献5:日本专利特开2017-138699号公报
技术实现要素:
18.发明所要解决的问题
19.但是,专利文献1所记载的急救辅助系统中,实际进行急救的现场附近的人,急救人员不一定会来,仅仅依靠语言或映照在监控器上的影像来应对是有界限的。而且,在视频电话中,难以进行应采取何种行动的指示。而且,视频电话对于需要多人协助,或者陷入恐慌的人数众多的情况下无法完全应对。而且,根据处置,还有时需要脱去急病患者的衣物,因此会守不住急病患者的隐私。
20.而且,专利文献2所记载的机器人装置为大型,例如难以像aed(自动体外除颤仪)那样大量设置在各处。而且,专利文献1所记载的机器人系统中,为了获取生物信息,必须在现场使患者就坐于机器人装置所具有的座椅。但是,根据患者的状态,也有时不能移动患者。因此,专利文献1所记载的技术中,不仅要进行远程操作,有时还需要在现场配置可进行
医疗行为的人。
21.但是,专利文献3所记载的系统中,通报者必须前去取用aed,要耗费从急病患者的位置朝向aed的位置的移动、从aed的位置朝向急病患者的位置的移动的往复时间。
22.以往技术中,在紧急事态时,有时无法冷静地从选择项中选择运送方式。
23.本发明是有鉴于所述问题而完成,目的在于提供一种即便可实施医疗行为的人不在现场也能够通过远程操作来进行救护,且即便通报者不前去取用急救装置,也能够由位于急救装置附近的人带来到患者所处的位置的急救系统、急救系统控制方法及计算机可读取的存储介质。
24.本发明的目的在于提供一种在紧急事态时能够从选择项中选择运送方式的运送方式决定系统、运送方式决定方法以及计算机可读取的存储介质。
25.本发明的目的在于提供一种能够实现现场的安全确保、隐私保护的急救系统、急救机器人、急救系统控制方法以及计算机可读取的存储介质。
26.解决问题的技术手段
27.(1)为了达成所述目的,本发明的一实施例的急救系统包括:拍摄装置,能够对至少一个以上的位置或方向进行远程操作;救生器具收纳部,收纳有急救用的工具;急救机器人,包括能够远程操作的至少一个末端执行器;终端,由至少一位操作者对所述急救机器人进行远程操作;以及服务器,能够获取所述急救机器人所获取的病情信息和环境信息,将所获取的所述病情信息和所述环境信息发送给所述终端,从所述终端接收对所述急救机器人的操作信息,基于所接收的所述操作信息来控制所述急救机器人。
28.(2)而且,本发明的一实施例的急救系统中,也可为,所述急救机器人能够由多人来操作,所述服务器基于优先顺位,将优先顺位低的操作者的操纵权移交给优先顺位高的操作者。
29.(3)而且,本发明的一实施例的急救系统中,也可为,所述终端为多个,所述急救机器人的操纵者操作第一终端,医生操作第二终端,所述急救机器人包括拍摄装置,所述拍摄装置能够由所述医生通过操作所述第二终端来进行操作,且能够从与所述急救机器人的操纵者不同的视点观察患者。
30.(4)而且,本发明的一实施例的急救系统中,也可为,所述终端为多个,由调度员(coordinator)操作与所述急救机器人的操纵者所操作的终端不同的终端,所述不同的终端将所述调度员基于病情信息和环境数据来决定运送目的地医院的结果发送至所述服务器。
31.(5)而且,本发明的一实施例的急救系统中,也可为,所述服务器将由所述急救机器人所获得的所述病情信息实时发送给所述终端,对于由所述急救机器人所获得的环境数据,在保存时为了保护隐私而附加处理指示。
32.(6)为了达成所述目的,本发明的一实施例的急救系统控制方法中,所述急救系统包括:拍摄装置,能够对至少一个以上的位置或方向进行远程操作;救生器具收纳部,收纳有急救用的工具;急救机器人,包括能够远程操作的至少一个末端执行器;终端,由至少一位操作者对所述急救机器人进行远程操作;以及服务器,其中,所述急救机器人获取病情信息和环境信息,并将所获取的所述病情信息和所述环境信息发送给所述服务器,所述服务器将所获取的所述病情信息和所述环境信息发送给所述终端,从所述终端接收对所述急救
机器人的操作信息,基于所接收的所述操作信息来控制所述急救机器人。
33.(7)为了达成所述目的,本发明的一实施例的计算机可读取的存储介质存储有程序,用于急救系统,所述急救系统包括:拍摄装置,能够对至少一个以上的位置或方向进行远程操作;救生器具收纳部,收纳有急救用的工具;急救机器人,包括能够远程操作的至少一个末端执行器;终端,由至少一位操作者对所述急救机器人进行远程操作;以及服务器,所述程序使所述服务器的计算机进行如下操作:使所述急救机器人获取病情信息和环境信息,并将所获取的所述病情信息和所述环境信息发送给所述服务器;将所获取的所述病情信息和所述环境信息发送给所述终端;从所述终端接收对所述急救机器人的操作信息,基于所接收的所述操作信息来控制所述急救机器人。
34.(8)为了达成所述目的,本发明的一实施例的急救机器人能够进行远程操作,所述急救机器人包括:拍摄装置,能够对至少一个以上的位置或方向进行远程操作;救生器具收纳部,收纳有急救用的救生器具;以及能够进行远程操作的至少一个末端执行器。
35.(9)而且,本发明的一实施例的急救机器人中,也可为,所述末端执行器包括指示器,所述指示器对通过所述远程操作来对作为处置对象的患者进行处理的人进行指示。
36.(10)而且,本发明的一实施例的急救机器人中,也可包括双臂,所述末端执行器能够对所述救生器具进行操作,且连接于所述双臂。
37.(11)而且,本发明的一实施例的急救机器人中,也可还包括:成为主要的远程操作者以外能够连接的拍摄装置。
38.(12)而且,本发明的一实施例的急救机器人中,也可搭载多个具有指向性的显示装置以及扬声器。
39.(13)而且,本发明的一实施例的急救机器人中,也可包括移动部件。
40.(14)而且,本发明的一实施例的急救机器人中,也可为,所述移动部件在所述急救机器人的移动时,驱动移动部件以辅助移动。
41.(15)而且,本发明的一实施例的急救机器人中,也可为,能够将自身的所述末端执行器收纳至本体。
42.(16)为了达成所述目的,本发明的一实施例的急救机器人系统包括:所述的(8)至(15)中任一项所述的急救机器人;至少一个终端,用于所述急救机器人的远程操作;位置信息获取装置,获取要进行急救的患者的位置信息;以及服务器,基于来自所述终端的远程操作而生成所述急救机器人的控制信息。
43.(17)为了达成所述目的,本发明的一实施例的急救系统包括:急救装置;以及急救通报机,发出急救通报,所述急救装置包括:能够远程操作的至少一个末端执行器;路径生成部,根据发出所述急救通报的位置信息与所述急救装置的自身位置的差异,生成从自身位置直至发出所述急救通报的位置为止的路径信息;以及输出部,基于所述路径生成部所生成的所述路径信息,将从自身位置直至发出所述急救通报的位置为止的导航通过语音以及图像中的至少一种而告知给所述急救装置周围的人。
44.(18)而且,本发明的一实施例的急救系统中,也可为,所述输出部为具有指向性的显示装置以及扬声器中的至少一个。
45.(19)而且,本发明的一实施例的急救系统中,也可为,所述急救装置包括移动部件,进行从自身位置直至发出所述急救通报的位置为止的移动的辅助。
46.(20)而且,本发明的一实施例的急救系统中,也可为,所述路径生成部对于从发出所述急救通报的位置直至自身位置为止的路径生成,使用与从自身位置直至发出所述急救通报的位置为止的路径不同的优先顺位来进行路径生成。
47.(21)为了达成所述目的,本发明的一实施例的急救方法是借助急救系统所进行的急救方法,其中,所述急救系统包括急救装置以及发出急救通报的急救通报机,所述急救装置包括能够远程操作的至少一个末端执行器以及路径生成部,路径生成部根据发出急救通报的位置信息与所述急救装置的自身位置的差异,进行从自身位置直至发出所述急救通报的位置为止的路径信息的生成,输出部基于由所述路径生成部所生成的所述路径信息,将从自身位置直至发出所述急救通报的位置为止的导航通过语音以及图像中的至少一种来告知给所述急救装置周围的人。
48.(22)为了达成所述目的,本发明的一实施例的计算机可读取的存储介质存储有急救程序,使计算机执行借助急救系统所进行的急救方法,所述急救系统包括急救装置以及发出急救通报的急救通报机,所述急救装置包括能够远程操作的至少一个末端执行器以及路径生成部,根据发出急救通报的位置信息与所述急救装置的自身位置的差异,进行从自身位置直至发出所述急救通报的位置为止的路径信息的生成,基于所生成的所述路径信息,将从自身位置直至发出所述急救通报的位置为止的导航通过语音以及图像中的至少一种来告知给所述急救装置周围的人。
49.(23)为了达成所述目的,本发明的一实施例的运送方式决定系统包括:急救装置,包含能够远程操作的至少一个末端执行器,且能够获取病情信息与环境信息;服务器,获取从所述急救装置获取的所述环境信息与所述病情信息;终端,能够获取所述病情信息与所述环境信息,且能够对所述急救装置进行远程操作,并将基于所获取的所述病情信息与所述环境信息而判断的判断结果发送至所述服务器;以及运送方式决定部,使用所述病情信息、所述环境信息以及所述判断结果中的至少一个信息,从多个运送方式中决定至少一个运送方式。
50.(24)而且,本发明的一实施例的运送方式决定系统中,也可为,运送方式决定部在决定了运送方式时,根据所决定的运送方式来将所述病情信息发送至运送目的地。
51.(25)而且,本发明的一实施例的运送方式决定系统中,也可为,运送方式决定部在决定了运送方式时,根据所决定的运送方式来生成运送路线的交通控制信息并予以发送。
52.(26)而且,本发明的一实施例的运送方式决定系统中,也可为,所述病情信息是患者的病历、呼吸状态、脉搏数、血压值、体温、意识水平以及出血程度中的至少一个,所述环境信息是位于所述患者周围的人数、与地基或地形相关的信息以及周围的交通量中的至少一个。
53.(27)而且,本发明的一实施例的运送方式决定系统中,也可为,所述运送方式决定部是由所述服务器或所述急救装置所包括。
54.(28)为了达成所述目的,本发明的一实施例的运送方式决定方法中,急救装置包含能够远程操作的至少一个末端执行器,获取病情信息与环境信息,服务器获取从所述急救装置获取的环境信息与病情信息,终端能够获取所述病情信息与所述环境信息,且能够对所述急救装置进行远程操作,并将基于所获取的所述病情信息与所述环境信息而判断的判断结果发送至所述服务器,运送方式决定部使用所述病情信息、所述环境信息以及所述
判断结果中的至少一个信息,从多个运送方式中决定至少一个运送方式。
55.(29)为了达成所述目的,本发明的一实施例的计算机可读取的存储介质存储有程序,使计算机执行如下操作:从获取了病情信息与环境信息且包含能够远程操作的至少一个末端执行器的急救装置获取所述环境信息与病情信息;终端能够获取所述病情信息与所述环境信息,且能够对所述急救装置进行远程操作,并发送基于所获取的所述病情信息与所述环境信息而判断的判断结果;获取由能够对所述急救装置进行远程操作且能够获取所述病情信息与所述环境信息的终端基于所获取的所述病情信息与所述环境信息而判断的判断结果;使用所述病情信息、所述环境信息以及所述判断结果中的至少一个信息,从多个运送方式中决定至少一个运送方式。
56.(30)为了达成所述目的,本发明的一实施例的急救系统包括:急救装置,包括由能够远程操作的至少一个末端执行器提供的远程操作功能、获取患者周边的环境信息的拍摄装置以及多个告知部;终端,获取所述环境信息,并发送表示使用所获取的所述环境信息而选定的旁观者的选定信息;以及指向性操作部件,基于从所述终端获取的所述选定信息,使指向性对准所确定的所述旁观者,从而将多个所述告知部中的至少一者的指向性控制向所述旁观者。
57.(31)而且,本发明的一实施例的急救系统中,也可为,所述告知部为扬声器以及图像显示部中的至少一个。
58.(32)而且,本发明的一实施例的急救系统中,也可为,所述扬声器为两个,所述指向性操作部件通过对所告知的语音信号的左右相位进行控制,从而控制指向性。
59.(33)而且,本发明的一实施例的急救系统中,也可还包括:援助判断部,判断是否需要对其他急救装置进行援助请求,若判断为需要援助请求,则对所述其他急救装置进行援助请求。
60.(34)而且,本发明的一实施例的急救系统中,也可为,所述其他急救装置包括移动部件,在所述援助请求中,包含从所述其他急救装置直至所述急救装置为止的路径信息与导航信息,所述其他急救装置将从所述指向性操作部件获取的所述援助请求中所含的所述路径信息与所述导航信息告知给所述其他急救装置周围的人。
61.(35)为了达成所述目的,本发明的一实施例的急救机器人包括:由能够远程操作的至少一个末端执行器提供的远程操作功能;拍摄装置,获取患者周边的环境信息;多个告知部;以及指向性操作部件,基于从获取所述环境信息并发送表示使用所获取的所述环境信息而选定的旁观者的选定信息的终端所获取的所述选定信息,使指向性对准所确定的所述旁观者,从而将多个所述告知部中的至少一个的指向性控制向所述旁观者。
62.(36)为了达成所述目的,本发明的一实施例的急救系统控制方法中,拍摄装置通过使拍摄装置拍摄图像来获取患者周边的环境信息,终端发送表示使用所获取的环境信息而选定的旁观者的选定信息,指向性操作部件基于从所述终端获取的所述选定信息,使指向性对准所确定的所述旁观者,从而将多个告知部中的至少一个的指向性控制向所述旁观者。
63.(37)为了达成所述目的,本发明的一实施例的计算机可读取的存储介质存储有程序,使计算机执行如下操作:通过使拍摄装置拍摄图像来获取患者周边的环境信息;基于表示使用所述环境信息而选定的旁观者的选定信息,使指向性对准所确定的所述旁观者,从
而将多个告知部中的至少一个的指向性控制向所述旁观者。
64.发明的效果
65.根据(1)~(7),即便可实施医疗行为的人不在现场也能够通过远程操作来操作急救机器人获取病情信息,因此能够进行救护。
66.根据(2),能够由多个操作者来顺利且高效地远程操作一个急救机器人,因此能够有效率地进行救护。
67.根据(3),医生能够从与急救机器人的操纵者不同的视点观察患者。
68.根据(4),能够在紧急事态时从选择项中选择运送方式。根据(4),运送方法还扩展到救护车以外的方法,因此救护车能够前往真正需要的人。根据(4),能够削减救护车的出动次数。
69.根据(5),能够保护患者、来进行患者的处理等的人、患者周围的人的隐私。
70.根据(8)~(16),即便可实施医疗行为的人不在现场也能够通过远程操作来进行救护。
71.根据(9),对于对患者进行处置等的人等,能够利用指示器来进行指示。
72.根据(10),能够对救生器具进行操作。
73.根据(11),主要的远程操者以外的其他人(例如医生)能够远程控制拍摄装置来获知患者的状态。
74.根据(12),能够适当地告知给在处置时位于周围的人中的想要告知的人。
75.根据(13)、(14),通报者容易使急救机器人从设置位置进行移动。而且,根据(13)、(14),到达时间也变短,因此可救助的生命变多。
76.根据(15),在未被用于急救时,能够紧凑地设置。
77.根据(17)~(22),即便通报者不前往取用急救装置,也能够由位于急救装置附近的人带来到患者所处的位置。
78.根据(18),容易对使急救装置移动的人进行导航。
79.根据(19),通报者容易使急救装置从设置位置进行移动。而且,根据(20),到达时间也变短,因此可救助的生命变多。
80.根据(23)~(29),在紧急事态时能够从选择项中选择运送方式。根据(23)~(29),运送方法还扩展到救护车以外的方法,因此救护车能够前往真正需要的人。根据(23)~(29),能够削减救护车的出动次数。
81.根据(24),作为运送目的地的医院在运送前便能够获取患者的病情信息,因此可进行接纳准备。
82.根据(25),能够根据运送方式来进行运送患者时的交通控制。
83.根据(30)~(37),能够实现现场的安全确保、隐私保护。
84.根据(32),通过对扬声器所输出的语音信号进行相位控制,从而能够朝向对象者进行告知。
85.根据(33)、(34),能够根据患者的病情或状态或者周围的环境,而使用多个急救机器人来进行处置。
86.根据(36),能够缩短使用于援助的急救机器人移动到患者身边的时间。
附图说明
87.图1是表示实施方式的急救机器人的结构例的图。
88.图2是表示实施方式的急救机器人的外形例的图。
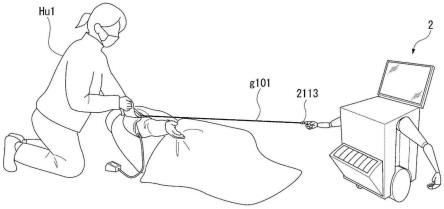
89.图3是表示第一实施方式的急救机器人的急救时的作业状态的一例的图。
90.图4是表示实施方式的急救系统的结构例的图。
91.图5是表示实施方式的数据库所保存的数据例的图。
92.图6是表示实施方式的急救机器人的结构例的图。
93.图7是表示实施方式的服务器的结构例的图。
94.图8是表示实施方式的终端的结构例的图。
95.图9是表示实施方式的急救通报机的结构例的图。
96.图10是表示实施方式的双臂的操作例的图。
97.图11是表示实施方式的臂操作的优先权的一例的图。
98.图12是表示实施方式的使用具有指向性的告知部的告知例的图。
99.图13是表示实施方式的所获取的图像例与所保存的图像例的图。
100.图14是表示实施方式的两个拍摄装置的操作例的图。
101.图15是表示实施方式的两个拍摄装置所拍摄的图像例的图。
102.图16是实施方式的患者的运送方法的决定流程与运送目的地医院的决定流程的流程图。
103.图17是表示实施方式的急救机器人的导航例的图。
104.图18是实施方式的急救机器人的路径信息的生成流程的流程图。
105.图19是表示运送目的地例的图。
106.图20是实施方式的患者的运送方法的决定流程的流程图。
107.图21是表示实施方式的使用具有指向性的告知部的告知例的图。
108.图22是表示实施方式的使用具有指向性的告知部来保护患者隐私的图。
109.图23是实施方式的告知部的指向性的控制流程与向其他急救机器人的援助请求流程的流程图。
110.图24是表示实施方式的急救系统的处理例的图。
111.图25是表示作为变形例的实施方式的急救机器人的急救时的作业状态的一例的图。
112.图26是表示作为变形例的实施方式的急救机器人的结构例的图。
113.图27是表示作为变形例的实施方式的服务器的结构例的图。
114.图28是表示作为变形例的实施方式的急救机器人系统的处理例的图。
115.[符号的说明]
[0116]
1、1a:急救系统
[0117]
2、2a:急救机器人
[0118]
3、3a:服务器
[0119]
200:框体
[0120]
201:控制部
[0121]
202:存储部
[0122]
203:驱动部
[0123]
204:电源
[0124]
205:通信部
[0125]
206:照明装置
[0126]
207:告知部
[0127]
208:告知驱动部
[0128]
209:拍摄装置
[0129]
210:拍摄装置驱动部
[0130]
211、211a、211b:臂
[0131]
212、212a、212b:移动部件
[0132]
2071:第一显示装置
[0133]
2072:第二显示装置
[0134]
2073:第一扬声器
[0135]
2074:第二扬声器
[0136]
2091:第一拍摄装置
[0137]
2092:第二拍摄装置
[0138]
2111:臂部
[0139]
2112:手
[0140]
2113:指示器
[0141]
2114:传感器
[0142]
215:拾音部
[0143]
216:路径生成部
[0144]
301:病情数据控制部
[0145]
302:机器人数据控制部
[0146]
303:环境数据控制部
[0147]
304:存储部
[0148]
305:通信部
[0149]
306:路径生成部
[0150]
307:运送方式判定部
[0151]
308:指向性判定部
[0152]
601:控制部
[0153]
602:存储部
[0154]
603:操作部
[0155]
604:图像显示部
[0156]
605:拾音部
[0157]
606:输出部
[0158]
607:通信部
[0159]
608:gps接收装置
具体实施方式
[0160]
以下,一边参照附图一边说明本发明的实施方式。另外,以下的说明中所用的附图中,为了将各构件设为可辨识的大小,适当变更了各构件的比例尺。
[0161]
[急救机器人的结构例]
[0162]
参照图1与图2来说明急救机器人的示例。
[0163]
图1是表示实施方式的急救机器人的结构例的图。如图1所示,急救机器人2例如包括框体200、臂211a(臂、末端执行器)、臂211b(臂、末端执行器)、第一显示装置2071、第二显示装置2072、第一扬声器2073、第二扬声器2074、第一拍摄装置2091、第二拍摄装置2092、移动部件212a、移动部件212b以及救生器具收纳部213、臂收纳部214a、臂收纳部214b等。臂211a包括手2112a。臂211b包括手2112b。而且,急救机器人2例如在手2112(2112a、2112b)(末端执行器)上安装有指示器2113。另外,急救机器人2也可用手2112来握持指示器2113。
[0164]
图2是表示实施方式的急救机器人的外形例的图。第一外形g11是臂211(211a、211b)已从臂收纳部214(214a、214b)被取出的状态,是第一显示装置2071可提示信息的状态,且是敞开(或打开)了救生器具收纳部213而可取出急救工具(未图示)的状态。另外,所谓急救工具,例如是血压计、脉搏测定器、体温测定器、呼吸测定器、自动体外除颤仪(automated external defibrillator,aed)、面罩、三角巾、听诊器、气道开放器材等。
[0165]
第二外形g12是被配置在规定的位置或场所时的状态,是臂211已被收纳在臂收纳部214中的状态,是第一显示装置2071已关闭的状态,且是救生器具收纳部213已关闭而无法取出急救工具(未图示)的状态。
[0166]
第三外形g13是急救机器人2正在移动的状态或正在使急救机器人2移动的状态。另外,急救机器人2既可为可通过自走式而移动,也可为可由人来移动。
[0167]
另外,图1、图2所示的急救机器人2的外形为一例,并不限于此。
[0168]
本实施方式中,如图3所示,急救机器人2不接触患者等的人,而是通过例如指示器2113的光g101等来对周围的人hu1进行指示。图3是表示本实施方式的急救机器人的急救时的作业的一例的图。
[0169]
[急救系统的结构例]
[0170]
接下来说明急救系统的结构例。图4是表示实施方式的急救系统的结构例的图。如图2所示,急救系统1例如包括急救机器人2、服务器3、数据库4、患者的移动电话5-1、通报者的移动电话5-2、医院100内的医生101等所使用的终端6-1、赶往现场的急救队111所使用的终端6-2、进行远程操作的急救人员121所使用的终端6-3、辅助的急救人员123所使用的终端6-4、以及调度员131所使用的终端6-5等。另外,终端6(6-1、6-2、6-3、6-4、6-5)例如是智能电话、平板终端、带通信功能的笔记型个人计算机以及专用机器中的至少一种。通报者的移动电话5-2例如包括gps接收装置51。
[0171]
另外,以下的说明中,“患者的移动电话5-1”也称作“移动电话5-1”,“通报者的移动电话5-2”也称作“移动电话5-2”,“医院100内的医生101等所使用的终端6-1”也称作“终端6-1”,“赶往现场的急救队111所使用的终端6-2”也称作“终端6-2”,“进行远程操作的急救人员121所使用的终端6-3”也称作“终端6-3”,“辅助的急救人员123所使用的终端6-4”也称作“终端6-4”,“调度员131所使用的终端6-5”也称作“终端6-5”。
[0172]
而且,以下的说明中,“赶往现场的急救队111”也称作“急救队111”,“进行远程操
作的急救人员121”也称作“急救人员121”。
[0173]
各移动电话、各终端、急救机器人2、服务器3、数据库4例如通过通信线路或国际互联网线路等而连接于网络nw。
[0174]
急救机器人2例如被设置在购物中心、车站、礼堂、美术馆等人群聚集的场所。
[0175]
另外,关于急救机器人2、服务器3的结构或功能、急救机器人2获取发送的数据、进行急救的辅助的人等,在实施方式中予以说明。
[0176]
而且,也能够设置急救通报机7,例如设置在购物中心、车站、礼堂、美术馆等人群聚集的场所。急救通报机也可为通报者所使用的移动电话等。
[0177]
图5是表示实施方式的数据库所保存的数据例的图。
[0178]
如图5所示,数据库4例如将姓名、病历、紧急联络方式、经常就诊的医院等的信息关联于移动电话号码而予以保存。另外,数据库4至少将病历和联络方式关联于移动电话号码而予以保存。另外,图5的数据库4中所保存的数据为一例,并不限于此。数据库4也可关联其他信息而予以保存。
[0179]
[急救机器人的结构例]
[0180]
首先说明急救机器人2的结构例。
[0181]
图6是表示实施方式的急救机器人的结构例的图。如图6所示,急救机器人2例如包括框体200、控制部201、存储部202、驱动部203、电源204、通信部205、照明装置206、告知部207、告知驱动部208、拍摄装置209、拍摄装置驱动部210、臂211、移动部件212、救生器具收纳部213、臂收纳部214以及拾音部215。另外,图6所示的结构为一例,并不限于此。急救机器人2也可包括其他功能部。例如,急救机器人2也可包括例如路径生成部216。另外,急救机器人2只要包括可利用指示器2113等来指示的一个以上的臂211即可。
[0182]
控制部201根据通信部205所接收的远程操作指示来控制急救机器人2的动作。或者,控制部201基于存储部202所存储的程序来控制急救机器人2的动作。控制部201将拍摄装置209所拍摄的图像(例如周围信息d2)经由通信部205而发送至服务器3、医生101、急救队111、调度员131。而且,控制部201将通报者或位于现场的人们操作急救工具而获取的生命检查等的医疗信息经由通信部205而发送至服务器3、医生101、急救队111、调度员131。控制部201例如基于远程操作信息,从臂收纳部214中取出臂211来进行控制。控制部201例如基于远程操作信息,将臂211收纳至臂收纳部214。控制部201例如基于远程操作信息来控制救生器具收纳部213的开闭。控制部201例如基于远程操作信息来控制移动部件212。控制部201基于远程操作信息或拍摄装置209所拍摄的图像,来切换照明装置206的照明的开启状态与关闭状态。控制部201例如基于远程操作信息来对驱动部203进行驱动,由此来控制臂211的动作。控制部201将远程操作信息中所含的信息输出至告知部207。另外,远程操作信息中也可包含文本信息、图像信息、语音信息等。控制部201根据通信部205从服务器3接收的远程操作指示来控制急救机器人2的臂211的动作。多个臂211也可分别由不同的操作员(例如急救人员、辅助的急救人员)来进行远程操作。控制部201经由网络nw来获取装置周围的其他急救机器人的使用状况(是使用中还是未使用),并对存储部202所存储的使用状况信息进行更新。
[0183]
存储部202存储被用于控制部201的控制的程序或规定的值等。存储部202暂时存储所获取的信息。而且,存储部202存储设置有急救机器人2的位置信息(纬度经度、商业设
施名等)与急救机器人2周围的地图信息。存储部202存储被用于路径检索的算法。存储部202在急救通报机7的设置位置为固定的情况下,将所设置的位置信息关联于急救通报机7的机器分类信息予以存储。
[0184]
另外,存储部202存储设置有自身装置周围的其他急救机器人的位置信息。另外,其他急救机器人的结构既可与急救机器人2相同,也可不同。在结构不同的情况下,存储部202也可将急救机器人的功能关联于位置信息予以存储。另外,存储部202存储自身装置周围的其他急救机器人的使用状况信息。
[0185]
驱动部203例如包含致动器、齿轮等。驱动部203根据控制部201的控制来控制臂211的动作。
[0186]
电源204对急救机器人2的各部供给电力。另外,电源204也可包括可充电的二次电池、可更换的电池、太阳能电池等。
[0187]
通信部205经由网络nw来进行信息的收发。另外,通信部205例如包括可连接于通信线路的通信电路、可连接于国际互联网的通信电路。通信部205也可包括全球定位系统(global positioning system,gps)接收机。
[0188]
照明装置206根据控制部21的控制来切换照明的开启状态与关闭状态。另外,照明装置206也可为多个。
[0189]
告知部207例如包括第一显示装置2071、第二显示装置2072、第一扬声器2073以及第二扬声器2074。另外,告知部207所包括的显示装置或扬声器的数量并不限于两个。另外,第一显示装置2071或第二显示装置2072也可在画面上包括触控面板传感器。
[0190]
第一显示装置2071将远程操作信息中所含的信息告知给位于现场的通报者或位于周围的人们。
[0191]
第二显示装置2072提示例如让旁观者(bystander)镇定,或者对旁观者发出指示的操作者122例如输入的信息。操作者122操作触控面板(未图示)或者操作键盘(未图示)来输入对旁观者的的提示信息。
[0192]
第一扬声器2073将远程操作信息中所含的信息告知给位于现场的通报者或位于周围的人们。另外,告知部207也可将远程操作信息中所含的文本信息通过众所周知的方法转换成语音信号并从第一扬声器2073予以输出。
[0193]
第二扬声器2074输出例如让旁观者镇定,或者对旁观者发出指示的操作者122例如输入的信息。操作者122使用麦克风(未图示)或者操作键盘(未图示)来输入对旁观者的提示信息。
[0194]
告知驱动部208根据控制部201的控制来控制第一显示装置2071的开闭、第二显示装置2072从框体200中的取出与收纳以及方向或角度、第一扬声器2073从框体200中的取出与收纳以及方向或角度、以及第二扬声器2074从框体200中的取出与收纳以及方向或角度。实施方式的告知部207可控制高度、上下方向的朝向或角度、左右方向的朝向或角度,即,可控制指向性。实施方式中,告知驱动部208根据急救人员121、操作者122以及辅助的急救人员123中的至少一人的远程操作指示来控制告知部207的指向性,由此,能够朝向所提供的人或想要传达的人提供信息。
[0195]
另外,告知驱动部208对于指向性的控制,也可并非控制扬声器的方向或角度,而是使用例如两个扬声器,对从两个扬声器输出的语音信号的相位等进行控制,由此来根据
控制部201的控制而控制指向性。另外,指向性的控制例如是为了确保现场的安全、或者让位于患者周围的人中的兴奋的人们镇定而使用。或者,指向性的控制被用于指示与患者为同性的人穿脱衣服、或者在穿脱衣服时指示周围的人背向患者等。
[0196]
拍摄装置209包括第一拍摄装置2091以及第二拍摄装置2092。另外,拍摄装置的数量并不限于两个。
[0197]
第一拍摄装置2091例如基于通过急救人员121的远程操作发出的拍摄指示来进行拍摄。所拍摄的图像例如是患者的图像、患者所处的周围图像等。
[0198]
第二拍摄装置2092例如基于通过医生101的远程操作发出的拍摄指示进行拍摄。所拍摄的图像例如是患者的图像、患者的患部的图像等。
[0199]
拍摄装置驱动部210根据控制部201的控制来控制第一拍摄装置2091从框体200中的取出与收纳以及方向或角度、以及第二拍摄装置2092从框体200中的取出与收纳以及方向或角度。
[0200]
臂211例如包括臂部2111、手2112(末端执行器)、指示器2113以及传感器2114。另外,如图1所示,急救机器人2例如包括两个臂211(211a、211b)。而且,臂211可收纳至臂收纳部214。臂211通过远程操作来控制。臂211可对收纳在救生器具收纳部213中的急救工具进行操作。另外,臂211包括通过驱动部203来驱动的致动器(马达、人工肌肉等)(未图示)。
[0201]
臂部2111相当于人的臂,在关节安装有传感器2114。
[0202]
手2112(握持部)相当于人的手,例如包括两个以上的手指,在手指的关节等安装有传感器2114。
[0203]
指示器2113例如为激光指示器。指示器2113例如既可被安装于手2112,也可为可由手2112来握持。指示器2113而控制部201的控制来切换开启状态与关闭状态。
[0204]
传感器2114是对关节的活动进行检测的编码器、被安装于手指或手2112的触觉传感器等。传感器2114将所检测出的检测值输出至控制部201。
[0205]
移动部件212例如为多个车轮。移动部件212也可由驱动部203予以驱动。另外,也可由人通过手提(hand carry)来使急救机器人2移动,此时,移动部件212也可通过驱动部203的驱动来进行移动的辅助。
[0206]
在救生器具收纳部213中,例如在箱或包中收纳急救工具。另外,救生器具收纳部213并不限于一个,例如也可设有前后等两个以上。另外,急救工具各自具备基于有线或无线的通信功能,将所获取的数据发送给急救机器人2。
[0207]
在臂收纳部214中收纳臂211。臂收纳部214如图1那样针对每个臂211而设。
[0208]
拾音部215是麦克风或包括多个麦克风的麦克风阵列。拾音部215也可基于急救人员121等的远程操作来拾取音响信号,并将所拾取的音响信号作为环境数据(环境信息)而发送给服务器3。
[0209]
路径生成部216例如进行与服务器3的路径生成部306同样的处理。
[0210]
而且,路径生成部216获取急救通报机7的位置信息,基于所获取的急救通报机7的位置信息来选择急救机器人2。路径生成部216对于从所选择的急救机器人2直至急救通报机7为止的移动路径的路径信息,根据从发出急救通报的位置信息与急救机器人2的自身位置的差异,来生成从自身位置直至发出急救通报的位置为止的路径。接下来,路径生成部216基于所生成的路径信息,生成从急救机器人2直至急救通报机7为止的包含图像与语音
5)。
[0219]
存储部304存储服务器3的各部所使用的程序、阈值、网络信息等。存储部304存储设置有急救机器人2的位置信息(纬度经度、商业设施名等)与急救机器人2周围的地图信息。存储部304在急救通报机7的设置位置为固定的情况下,将所设置的位置信息关联于急救通报机7的机器分类信息予以存储。
[0220]
通信部305经由网络nw来与急救机器人2进行数据的收发。通信部305经由网络nw来参照数据库4。通信部305经由网络nw来与终端6(6-1、6-2、6-3、6-4、6-5)进行信息的收发。
[0221]
路径生成部306基于通报者的位置信息、移动电话5-2、或急救通报机7的位置信息,来选择最靠近通报者设置的急救机器人2。另外,位置信息例如是基于gps接收装置51从gps卫星所接收的数据而生成。而且,路径生成部306在急救通报机7的设置位置为固定的情况下,对于急救通报中所含的识别信息,参照存储部304所存储的信息来获取急救通报机7的位置信息。路径生成部306使用所选择的急救机器人2的位置信息、与通报者的位置信息及环境数据的差异,生成直至通报者与急救机器人2为止的路径信息。另外,路径并不限于最短距离,也可考虑周围的道路状况或人的多少、道路宽度等来生成。路径生成部306将所生成的路径信息经由网络nw而发送至通报者的移动电话5-2。而且,在其他状况下,路径生成部306将所生成的路径信息经由网络nw而发送至急救机器人2。另外,路径生成部也可由急救机器人2所包括。
[0222]
运送方式判定部307基于所获取的生命检查等医疗信息与来自急救人员的指示等,来判定治疗或处置是否已完成。运送方式判定部307在治疗或处置已完成,例如可利用出租车来运送的情况下,将表示中止救护车的出动的出动停止请求发送至急救队111的终端6-2。运送方式判定部307在判定为治疗或处置尚未完成的情况下,将表示需要继续远程操作的信息发送至急救人员121的终端6-3等。另外,急救机器人2也可包括进行与运送方式判定部307同等的处理的运送方式判定部。
[0223]
指向性判定部308根据急救人员121、让旁观者镇定的操作者122、辅助的急救人员123、调度员131等的远程操作或指示,来判定使急救机器人2的告知部207对准的朝向(指向性)。指向性判定部308将所判定的指向性信息输出至机器人数据控制部302。
[0224]
而且,在其他状况下,指向性判定部308将从急救机器人2搬来到通报者身边时,基于急救机器人2所识别的结果,来判定为了告知路径信息而使告知部207朝向的方向(指向性)。另外,指向性判定部308在将急救机器人2搬来到通报者身边时,也可对急救机器人2所发送的音响信号进行语音识别处理,对图像进行图像识别处理,以识别搬来的人。指向性判定部308根据急救人员121、让旁观者镇定的操作者122、辅助的急救人员123、调度员131等的远程操作或指示,来判定使急救机器人2的告知部207朝向的方向(指向性)。指向性判定部308将所判定的指向性信息输出至机器人数据控制部302。
[0225]
另外,急救机器人2或服务器3除了联络急救队111可否出动以外,也可生成运送路线的交通控制信息(信号、对周围的汽车的指示(自动驾驶尤为有效))。急救机器人2或服务器3也可将所生成的交通控制信息发送至例如交通控制中心或急救中心。由此,根据本实施方式,能够根据反应方式来进行运送路线的交通控制。
[0226]
[终端6的结构例]
[0227]
接下来说明终端6的结构例。
[0228]
图8是表示本实施方式的终端的结构例的图。如图8所示,终端6例如包括控制部601、存储部602、操作部603、图像显示部604、拾音部605、输出部606以及通信部607。另外,图8所示的终端6的结构为一例,并不限于此。另外,终端6也可包括gps接收装置608。而且,通报者的移动电话5-2也可为与包括gps接收装置608的终端6同样的结构。
[0229]
控制部601使通信部607所接收的信息(病情信息、环境数据等)显示于图像显示部604。控制部601在通信部607所接收的环境数据中包含音响信号的情况下,使输出部606回放音响信号。控制部601将拾音部605所拾取的语音信号经由通信部607而发送至服务器3。控制部601基于操作部603所检测出的操作结果来生成远程操作指示,并将所生成的远程操作指示经由通信部607而发送至服务器3。另外,也存在所发送的语音信号与远程操作指示相关的情况。例如,在操作者从第二扬声器2074对位于患者周围的人进行号召等的情况下,在远程操作指示中也包含有从第二扬声器2074输出语音信号的指示。
[0230]
存储部602存储控制部601用于控制的程序、阈值等。存储部602根据控制部601的控制来存储环境数据、病情信息。
[0231]
操作部603对操作者的操作结果进行检测。操作部603例如是设在图像显示部604上的触控面板传感器。或者,操作部603也可为键盘、鼠标。或者,操作部603也可为操纵杆。或者,操作部603也可为包括对操作者的手的活动进行检测的触觉传感器的球(globe)等。
[0232]
图像显示部604显示控制部601所输出的图像。
[0233]
拾音部605包括至少一个麦克风,拾取操作者的语音。另外,拾音部605也可为包含多个麦克风的麦克风阵列。
[0234]
输出部606例如为扬声器。输出部606输出控制部601所输出的音响信号。
[0235]
通信部607经由网络nw而从服务器3接收信息(病情信息、环境数据等),并将所接收的信息输出至控制部601。通信部607将控制部601所输出的操作请求经由网络nw而发送至服务器3。
[0236]
gps接收装置608基于从gps卫星接收的信息来获取终端6的位置信息。另外,在终端6例如为移动电话等的情况下,终端6也可基于基站信息来获取位置信息。
[0237]
[急救通报机7的结构例]
[0238]
接下来说明急救通报机7的结构例。
[0239]
图9是表示本实施方式的急救通报机的结构例的图。如图9所示,急救通报机7例如包括控制部701、存储部702、操作部703、gps接收装置704以及通信部705。急救通报机7也可包括显示部706。另外,图8所示的急救通报机7的结构为一例,并不限于此。
[0240]
控制部701在操作部703受到操作时,对显示部706进行控制,例如使其点亮或者变更点亮的颜色等。控制部701在操作部703受到操作时,将急救通报经由通信部705与网络nw而发送至服务器3。另外,急救通报中包含急救通报机7的位置信息。另外,在急救通报机7的设置位置为固定的情况下,控制部701也可取代位置信息而发送急救通报机7的识别信息。
[0241]
存储部702存储控制部701所使用的程序、阈值等。存储部702存储急救通报机7的识别信息。
[0242]
操作部703检测利用者(通报者)的操作。操作部703例如为机械式开关、触控面板传感器等。
[0243]
gps接收装置704使用从gps卫星接收的信息来获取急救通报机7的位置信息。另外,在急救通报机7的设置位置为固定的情况下,急救通报机7也可不包括gps接收装置704。
[0244]
通信部705在操作部703受到操作时,将急救通报经由网络nw而发送至服务器3。
[0245]
显示部706例如是灯、液晶显示装置、有机电致发光(electroluminescence,el)部等中的至少一个。显示部706例如在操作部703受到操作时,通过控制部701的控制来使灯点亮或者变更灯的颜色。
[0246]
[双臂的操作例]
[0247]
接下来说明双臂的操作例。
[0248]
图10是表示本实施方式的双臂的操作例的图。图10的示例中,急救人员121通过操作终端6-3来操作与左臂对应的臂211b,辅助的急救人员123通过操作终端6-4来操作与右臂对应的臂211a。服务器3从终端6-3、终端6-4接收操作请求,提取所接收的操作请求分别是针对哪个臂211的操作请求,生成针对各臂211的远程操作信息。另外,在操作请求中,例如包含终端6的识别信息、表示想要操作的臂211的信息等。而且,服务器3的存储部304将终端6的识别信息与使用者相关联地予以存储。服务器3将所生成的远程操作信息经由网络nw而发送至急救机器人2,由此,不同的操作者能够远程操作急救机器人2的双臂。
[0249]
另外,图10所示的示例中,对不同的远程操作者远程操作左右的臂211的示例进行了说明,但也可由一位远程操作者(例如急救人员121)远程操作两个臂211。
[0250]
而且,还存在下述情况:例如当急救人员121正在远程操作两个臂211时,老练的辅助的急救人员123想要操作臂211。此种情况下,两位远程操作者无法同时操作相同的臂211。因此,本实施方式中,对于臂211的操作设定有优先权。图11是表示本实施方式的臂操作的优先权的一例的图。图8的示例是辅助的急救人员123的优先权被设定得比急救人员121的优先权高的示例。与此种优先权相关的信息既可由服务器3的存储部304预先存储,也可在每次急救时由急救人员等来设定
[0251]
服务器3基于此种优先权来生成远程操作信息。例如,当急救人员121正在远程操作臂211时,从优先权高的辅助的急救人员123所使用的终端6-4收到臂211的操作请求的情况下,服务器3基于优先顺位,将臂211的操作权由急救人员121变更为辅助的急救人员123来进行控制。即,服务器3的机器人数据控制部302将优先顺位低的操作者的操纵权移交给优先顺位高的操作者。此时,服务器3也可将表示已变更了优先权的信息发送至各终端6-3、6-4。另外,所述的示例中,说明了双臂均将臂211的操作权从急救人员121变更为辅助的急救人员123的示例,但并不限于此。例如当急救人员121正在操作两个臂211时,辅助的急救人员123发出了相当于右臂的臂211a的操作请求的情况下,服务器3将臂211a的操作从急救人员121的指示切换为辅助的急救人员123的指示。
[0252]
由此,根据本实施方式,能够由多个操作者来顺利且高效地远程操作一个急救机器人,因此能够有效率地进行救护。
[0253]
另外,在所述的示例中,对远程操作者为两位的示例进行了说明,但远程操作者也可为三位以上。而且,臂211的数量也可为三个以上。
[0254]
[使用具有指向性的告知部的告知例]
[0255]
接下来说明使用具有指向性的告知部207的告知例。
[0256]
图12是表示本实施方式的使用具有指向性的告知部的告知例的图。图12的示例
中,例如通报者hu1正在进行患者的处理。若正在进行处理的场所是人多的例如购物中心等,则除了患者与正在进行处置的人以外,周围还有可能存在多个人。此种情况下,在位于周围的人群中,也有可能出现变得恐慌的人。
[0257]
因此,本实施方式中,远程操作者操作终端6来使告知部(例如第二扬声器2074)朝向想要传达提醒等的人群hug,将由终端6所拾取的语音信号告知给想要传达提醒等的人群hug。另外,急救机器人2或服务器3也可针对急救机器人2的拾音部215所拾取的音响信号,通过众所周知的音源方法推测处理等来推测想要传达提醒等的人群hug方向。另外,急救机器人2或服务器3也可还使用对拍摄装置209所拍摄的图像进行众所周知的图像处理所得的结果,来推测想要传达提醒等的人群hug方向。
[0258]
[所获取的信息的处理例]
[0259]
接下来说明由急救机器人2所获取的信息的处理例。
[0260]
服务器3将由急救机器人2所获取的生命检查等医疗信息例如实时发送给各终端6。所述生命检查等医疗信息也可为能够保存在各终端6等中。
[0261]
图13是表示本实施方式的所获取的图像例与所保存的图像例的图。
[0262]
服务器3将由拍摄装置209所拍摄的图像(环境数据)发送至各终端6。所述图像信息也可为能够保存在各终端6等中,但在保存时为了保护隐私,对所获取的图像g101实施马赛克处理(图像g102),或者对图像进行模糊处理。服务器3对图像(环境数据)赋予用于此种隐私保护的处理指示,并将赋予了处理指示的图像(环境数据)发送至各终端6。另外,在保存时所进行的处理并不限于马赛克处理或模糊处理,也可为其他图像处理。
[0263]
[拍摄装置的操作例]
[0264]
接下来说明拍摄装置的操作例。
[0265]
图14是表示本实施方式的两个拍摄装置的操作例的图。图14的示例中,急救人员121正通过操作终端6-3来操作第一拍摄装置2091,辅助的医生101正通过操作终端6-4来操作第二拍摄装置2092。另外,在对拍摄装置209的操作指示中包含拍摄的视角、拍摄的中心位置等。
[0266]
图15是表示本实施方式的两个拍摄装置所拍摄的图像例的图。急救人员121操作终端6-4,例如通过第一拍摄装置2091来拍摄处置或病情信息的获取或指示所需的图像g121。
[0267]
有时医生101想要以与图像g121不同的角度或不同的视角来确认患者的状态或患部的图像。此种情况下,医生101操作终端6-1,例如通过第二拍摄装置2092来拍摄所需的图像g122。
[0268]
[运送方法的决定与运送目的地医院的决定方法]
[0269]
接下来说明患者的运送方法的决定与运送目的地医院的决定方法。
[0270]
图16是本实施方式的患者的运送方法的决定流程与运送目的地医院的决定流程的流程图。
[0271]
(步骤s101)服务器3经由网络nw而从急救机器人2获取病情信息与环境数据。接下来,服务器3将所获取的病情信息与环境数据经由网络nw而发送至各终端6。
[0272]
(步骤s102)例如,急救人员121基于终端6-4所接收的病情信息与环境数据来操作终端6-4,由此,远程操作急救机器人2来进行处置等的指示或处理。服务器3基于从终端6-4
收到的远程操作指示,控制急救机器人2来进行针对患者的处置等或处置的指示。
[0273]
(步骤s103)例如,急救人员121基于所获取的病情信息与环境数据来判断针对患者的处置是否已结束。另外,例如服务器3也可基于病情信息与环境数据来进行针对患者的处置是否已结束的判断。急救人员121操作终端6-4来输入针对患者的处置是否已结束的判断结果。终端6-4将判断结果经由网络3而发送至服务器3。服务器3基于从终端6-4接收的判别结果来判别针对患者的处置是否已结束。若服务器3判别为针对患者的处置已结束(步骤s103;是),则前进至步骤s104的处理。若服务器3判别为针对患者的处置尚未结束(步骤s103;否),则前进至步骤s105的处理。
[0274]
(步骤s104)服务器3将表示处置已结束的信息经由网络nw而发送至各终端6。调度员131基于终端6-5所获取的病情信息、环境数据以及表示处置已结束的信息而判断为不需要利用救护车来运送。另外,也可由调度员131或辅助的急救人员123等进行利用其他运送方式来运送患者的判断。调度员131操作终端6-5而输入判断为不需要利用救护车来运送的判断结果。终端6-5将判断结果经由网络nw而发送至服务器3。调度员131安排其他运送方式(例如出租车)。另外,救护车的出动中止的通知或其他运送方式的安排既可由调度员131进行,也可由收到这些信息的服务器3进行。另外,若调度员131判断为利用其他运送方式将患者运送至医院,则也可基于病情信息与环境数据来决定医院(例如经常就诊的医院)。终端6-5也可基于调度员131所操作的结果来将病情信息或个人信息发送给所决定的医院。另外,服务器3也可接收所述信息,并将病情信息或个人信息发送给所决定的医院。
[0275]
(步骤s105)服务器3例如判别从通过远程操作而开始处理起是否已经过了规定时间。另外,规定时间是预计从进行急救通报开始直至救护车到达的时间以内的时间。若服务器3判别为已经过了规定时间(步骤s105;是),则前进至步骤s106的处理。若服务器3判别为尚未经过规定时间(步骤s105;否),则返回步骤s101的处理。
[0276]
(步骤s106)由于经过了规定时间后处置仍未结束,因此服务器3判断为将患者运送至医院为好。接下来,服务器3将判断为将患者运送至医院为好的结果、请求选择运送目的地的指示经由网络nw而发送至调度员131所使用的终端6-5。另外,服务器3对请求选择运送目的地的指示附加患者的个人信息(病历等)而予以发送。调度员131基于终端6-5所收到的信息(病情信息、环境数据、请求选择运送目的地的指示),操作终端6-5来输入运送目的地医院的候选的信息。终端6-5将运送目的地医院的候选的信息经由网络nw而发送至服务器3。服务器3经由网络nw来获取终端6-5所发送的运送目的地医院的候选的信息。
[0277]
(步骤s107)服务器3例如基于急救队111操作终端6-2的结果来判别救护车是否已到达。若服务器3判别为救护车已到达(步骤s107;是),则结束患者的运送方法的决定流程与运送目的地医院的决定处理。若服务器3判别为救护车尚未到达(步骤s107;否),则返回步骤s101的处理。
[0278]
[急救机器人2的导航例]
[0279]
接下来说明急救机器人2的导航例。
[0280]
图17是表示本实施方式的急救机器人的导航例的图。图18的示例是患者的发现者hu1操作急救通报机7进行了急救通报后的状态。急救机器人2将根据急救通报而从服务器3收到的路径信息例如显示于第一显示装置2071,并从第二扬声器2074输出语音信号,以朝向位于周围的人hu2进行告知。另外,急救机器人2在移动时,也可驱动移动部件212来辅助
移动。
[0281]
如图17所示,在第一显示装置2071上,显示从设置有急救机器人2的当前地g101直至急救通报机7的位置g102(即患者所处的位置)为止的路径g103。此种图像信息既可基于路径信息而由急救机器人2生成,也可由服务器3生成。语音信号例如为“下个路口请向左拐弯”等。另外,路径g103是选择具有人可移动急救机器人2的道路宽度的路线。
[0282]
图18是本实施方式的急救机器人的路径信息的生成流程的流程图。
[0283]
(步骤s201)控制部201经由网络nw来获取急救通报机7所发送的急救通报。
[0284]
(步骤s202)控制部201获取急救通报机7的位置信息。
[0285]
(步骤s203)路径生成部216使用急救通报机7的位置信息、存储部304所存储的信息来选择急救机器人2,并获取所选择的急救机器人2的位置信息。
[0286]
(步骤s204)路径生成部216使用存储部202所存储的信息,来生成从急救机器人2到急救通报机7的路径信息。
[0287]
(步骤s205)路径生成部216基于所生成的路径信息,生成从急救机器人2直至急救通报机7为止的包含图像与语音信号的导航信息。
[0288]
(步骤s206)控制部201例如每隔一秒获取例如移动中的急救机器人2的位置信息,判别急救机器人2是否已到达急救通报机7的位置。控制部201在判别为急救机器人2已到达时(步骤s206;是),结束处理。控制部201在判别为急救机器人2尚未到达时(步骤s206;否),返回步骤s205的处理。
[0289]
另外,图18所示的路径信息的生成以及导航信息的生成中的至少一个处理也可由服务器3进行。
[0290]
而且,所述示例中,说明了急救机器人2进行从急救机器人2的设置位置直至急救通报机7的设置位置为止的路径信息性的生成与导航的示例,但并不限于此。
[0291]
在急救机器人2可再利用的情况下,优选的是,急救机器人2由位于周围的人带回设置急救机器人2的场所。此时,不管是当前位置,还是设置急救机器人2的场所,急救机器人2均已获取,因此,急救机器人2在回路中,在步骤s204中,根据从当前位置直至设置急救机器人2的位置的差异,来生成从当前位置直至设置急救机器人2的位置的路径信息。急救机器人2也可与来路同样地从告知部207告知回路的路径信息与导航信息,由此来进行导航。另外,急救机器人2对于回路的路径信息与导航信息,也可在来路中生成路径信息或导航信息。另外,在回路中,急救机器人2也可通过驱动移动部件212来进行人对移动的辅助。而且,来路与回路的路径信息或导航信息既可对应于环境数据等而相同,也可不同。例如也可为,在来路时,为了迅速进行处置而以时间为优先,而在回路中,即便耗费时间也无妨,而以移动的方便性为优先。
[0292]
由此,根据本实施方式,能够削减在处置后使急救机器人2返回原本位置的作业的工夫。
[0293]
[运送方法的决定与运送目的地医院的决定方法]
[0294]
接下来,使用图19、图20来说明患者的运送方法的决定与运送目的地医院的决定方法。
[0295]
图19是表示运送目的地例的图。图20是本实施方式的患者的运送方法的决定流程的流程图。
[0296]
(步骤s201)服务器3经由网络nw而从急救机器人2获取病情信息与环境数据。接下来,服务器3将所获取的病情信息与环境数据经由网络nw而发送至各终端6。
[0297]
(步骤s202)例如,急救人员121基于终端6-4所收到的病情信息与环境数据来操作终端6-4,从而远程操作急救机器人2来进行对通报者等的指示等的指示,而且使急救机器人2进行患者huk的处置。服务器3基于从终端6-4收到的远程操作指示,控制急救机器人2来进行患者huk的处置等或对通报者等的指示。
[0298]
(步骤s203)例如,急救人员121基于所获取的病情信息与环境数据来判断患者huk的处置是否已结束。急救人员121操作终端6-4来输入患者huk的处置是否已结束的判断结果。终端6-4将判断结果经由网络nw而发送至服务器3。运送方式判定部307基于从终端6-4收到的判断结果,来判别患者huk的处置是否已结束。另外,运送方式判定部307也可基于病情信息与环境数据来进行患者huk的处置是否已结束的判别。运送方式判定部307在判别为患者huk的处置已结束时(步骤s203;是),前进至步骤s104的处理。运送方式判定部307在判别为患者huk的处置尚未结束时(步骤s203;否),前进至步骤s105的处理。
[0299]
(步骤s204)运送方式判定部307基于从急救机器人2获取的病情信息与环境数据,而判断为利用其他运送方式来运送患者huk。接下来,运送方式判定部307将救护车的出动中止指示经由网络nw而发送至急救队111的终端6-2。接下来,运送方式判定部307进行其他运送方式(例如为出租车g121)的安排。处理后,运送方式判定部307结束处理。另外,利用其他运送方式来运送患者的判断也可由调度员131或急救士121等来进行。此时,运送方式判定部307也可基于调度员131或急救人员121等的判断结果、病情信息以及环境数据中的至少一个,来进行救护车的出动中止指示与其他运送方式的安排。而且,运送方式判定部307即便在处置已结束的情况下,也可基于病情信息与环境数据来与步骤s206同样地决定医院(例如经常就诊的医院),并向所决定的医院发送病情信息或个人信息。因此,通过其他运送方式g121来运送患者huk的目的地既可为自家g122等,也可为医院g102。
[0300]
(步骤s205)运送方式判定部307判别例如从通过远程操作开始处理起是否经过了规定时间。另外,规定时间是预料从进行急救通报开始直至救护车g101到达的时间以内的时间。运送方式判定部307在判别为已经过了规定时间时(步骤s206;是),前进至步骤s106的处理。服务器3在判别为尚未经过规定时间时(步骤s205;否),返回步骤s201的处理。
[0301]
(步骤s206)调度员131基于终端6-5所获取的病情信息与环境数据,列出作为运送目的地的医院的候选,以作为表示运送至医院为好的判断结果。终端6-5基于调度员131的操作结果,将作为运送目的地的医院候选信息经由网络nw而发送至服务器3。运送方式判定部307基于病情信息、环境数据以及判断结果中的至少一个来安排医院g102,并向所安排的医院g102发送患者的个人信息与病情信息。由此,根据本实施方式,作为运送目的地的医院在运送前便能够获取患者的病情信息,因此可进行接纳准备。另外,实施方式中,“多个运送方式”例如是借助救护车的运送方式、借助出租车的运送方式、在有陪同人的情况下借助陪同人的车的运送方式等。
[0302]
(步骤s207)服务器3例如基于急救队111对终端6-2进行操作的结果来判别救护车g101是否已到达。服务器3在判别为救护车g101已到达时(步骤s207;是),结束患者的运送方法的决定处理。服务器3在判别为救护车g101尚未到达时(步骤s207;否),返回步骤s201的处理。
[0303]
另外,急救机器人2或服务器3除了联络急救队111可否出动以外,也可生成运送路线的交通控制信息(信号、对周围的汽车的指示(自动驾驶时尤为有效))。急救机器人2或服务器3也可将所生成的交通控制信息发送至例如交通控制中心或急救中心。由此,根据本实施方式,可根据反应方式来进行运送路线的交通控制。
[0304]
[受到援助请求的其他急救机器人的移动方法例]
[0305]
此处,对受到援助请求的其他急救机器人的移动方法例进行说明。
[0306]
其他急救机器人也可由服务器3、或其他急救人员远程操作终端来使其自行移动。
[0307]
或者,其他急救机器人也可将从服务器3或急救机器人2收到的路径信息、导航信息告知给位于其他急救机器人周围的人,以让他们带着移动到患者所处的位置。
[0308]
或者,也可将直至其他急救机器人的位置为止的路径信息与导航信息通过例如未图示的打印装置进行打印输出而交给位于患者周围的人,让位于患者周围的人拿着带来。
[0309]
另外,所述的移动方法为一例,并不限于此。
[0310]
[使用具有指向性的告知部的告知例]
[0311]
接下来说明使用具有指向性的告知部207的告知例。
[0312]
图21是表示本实施方式的使用具有指向性的告知部的告知例的图。图21的示例中,例如通报者hub1正在进行患者的处理。在患者与通报者hub1的周边,存在旁观者(正好在救急现场的人)hub2、hub3。例如,急救人员121在判断为对于患者的处置等除了通报者hub1以外还需要援助的情况下,基于终端6-3所获取的环境数据来选定看上去能够委托援助的人。例如,在周围存在多个人的情况下,急救人员121例如从儿童或老年人以外的人中进行选定。或者,急救人员121在需要脱衣的情况下,急救人员121选定与患者为同性的人。
[0313]
急救人员121操作终端6-3来输入选定结果。终端6-3将所输入的(或所选择的)选定结果经由网络nw而发送至服务器3。服务器3基于所收到的选定结果,生成用于对所选定的人进行告知的远程操作指示,并将所生成的远程操作指示经由网络nw而发送至急救机器人2。
[0314]
急救机器人2的告知驱动部208根据所收到的远程操作指示来控制对所选择的人hub2、hub3进行告知的指向性。告知驱动部208例如通过控制第二显示装置2072或第二扬声器2074的方向或角度来控制指向性。或者,告知驱动部208控制第一扬声器2073与第二扬声器2074各自的语音信号的相位来控制指向性。或者,告知驱动部208对设于第二显示装置2072的例如液晶控制方式的偏光滤光片进行控制,从而控制指向性。另外,告知驱动部208针对急救机器人2的拾音部215所拾取的音响信号,通过众所周知的音源方法推测处理等来推测以及追踪所选择的人们的方向。而且,告知驱动部208也可还使用对拍摄装置209所拍摄的图像进行众所周知的图像处理的结果,来推测以及追踪所选择的人们的方向。另外,所述指向性的控制方法为一例,并不限于此。
[0315]
另外,所告知的信息既可为操作终端6-3的操作部603而输入的信息,或者也可为拾音部605所拾取的语音信号,或者还可为急救机器人2或服务器3等预先存储的信息。所告知的内容例如包含协助请求、急救工具的使用方法。
[0316]
由此,本实施方式中,远程操作者操作终端6来将告知部207的指向性控制向想要传达提醒等的人们,以将告知内容告知给想要传达的人们。
[0317]
图22是表示本实施方式的使用具有指向性的告知部来保护患者隐私的示例的图。
图22的示例是患者为女性,周围的正在处置的人hub1为女性,位于周围的人们hub2、hub3为男性时的示例。例如,在必须使用aed的情况下,进行处置的人必须要脱去患者的衣物。此种情况下,为了保护患者的隐私等,必须由同性的人来进行处理,必须使异性看不到患者且位于周边的其他人也看不到患者。
[0318]
此种情况下,急救人员121操作终端6-3来进行输入,以使异性的人们背向患者而形成人墙,以使其在处置中看不到患者且其他人看不到患者。急救机器人2的告知驱动部208根据基于所输入的内容而生成的远程操作指示,将告知部207的指向性控制向作为对象的人们以进行告知。
[0319]
[告知部207的指向性的控制流程、向其他急救机器人的援助请求方法]
[0320]
接下来说明对于帮忙进行处置的人的、告知部207的指向性的控制流程、与向其他急救机器人的援助请求流程。
[0321]
图23是本实施方式的告知部207的指向性的控制流程与向其他急救机器人的援助请求流程的流程图。
[0322]
(步骤s301)服务器3获取通报者的移动电话5-2所发出的急救通报。接下来,服务器3将所获取的急救通报发送至各终端6。
[0323]
(步骤s302)急救人员121操作终端6-3来指示急救机器人2让通报者等进行处置或使用急救工具,或者让急救机器人2进行处置或使用急救工具。急救机器人2获取病情信息与环境数据,并将所获取的病情信息与环境数据经由网络nw而发送至服务器3。服务器3将所获取的病情信息与环境数据经由网络nw而发送至各终端6。
[0324]
(步骤s303)急救人员121基于病情信息与环境数据,从位于周围的人中选择想要拜托帮忙处置等的对象者。急救人员121操作终端6-3来输入选定结果。
[0325]
(步骤s304)服务器3基于从终端6-3收到的选定结果,来设定朝向对象者的指向性。另外,对朝向对象者的指向性的设定也可由急救机器人2来进行。服务器3将包含告知部207的指向性的控制信息或请求内容等的远程操作指示经由网络nw而发送至急救机器人2。急救机器人2根据所接收的远程操作指示,将告知部207的指向性控制为想要告知的人们以进行告知。
[0326]
(步骤s305)援助判断部218基于所获取的病情信息与环境数据,来判断是否需要设置在自身装置周围的其他急救机器人的援助。另外,也可由急救人员121基于病情信息与环境数据来判别是否需要向其他救生机器人进行援助请求。此时,急救人员121也可操作终端6-3来输入援助请求的判断结果并予以发送,由此,援助判断部218获取判断结果。援助判断部218在援助请求的判断结果为需要其他救生机器人进行援助请求时(步骤s305;是),前进至步骤s306的处理。援助判断部218在援助请求的判断结果为不需要其他救生机器人进行援助请求时(步骤s305;否),结束处理。
[0327]
(步骤s306)援助判断部218在判断为需要其他急救机器人的援助时,将援助请求经由网络nw而发送至服务器3。
[0328]
另外,图23中,在从位于周围的人中选定了对象者后,进行是否需要其他急救机器人的援助的判别,但并不限于此。急救系统1也可在进行是否需要其他急救机器人的援助的判别后,从位于周围的人中选定对象者,还可同时进行两个处理。
[0329]
[急救系统1的处理例]
[0330]
接下来,参照图4、图6至图9、图24来说明本实施方式的急救系统1的处理例。图24是表示本实施方式的急救系统的处理例的图。另外,图24中,“急救机器人”也称作“机器人”。另外,图24所示的示例是急救机器人2不接触到患者等的人,而通过例如指示器2113的光等来对周围的人进行指示的示例。
[0331]
(步骤s11)当通报者发现患者时,通报者使用移动电话5-2来打电话请求急救(急救通报)。另外,所述急救通报例如被发送至急救机器人2、服务器3、急救队111的终端6-2、急救人员121的终端6-3、辅助的急救人员的终端6-4、调度员131的终端6-5。另外,在急救通报中,至少包含现场的地址等的位置信息。另外,在急救通报中,也可包含患者的样子、环境的状态、或患者的人数、商业设施名等的信息。另外,所谓环境的状态,例如是指现场的交通状况、现场为购物中心等的信息、或者现场的温度或湿度等的信息。另外,现场的地址等的位置信息例如也可由服务器3基于通报者的移动电话5-2的位置信息来获取。
[0332]
(步骤s12)救护车(未图示)根据急救通报而开始奔赴现场。处理后,急救系统1进行步骤s13a或步骤s13b中的至少一个处理。
[0333]
(步骤s13a)服务器3根据急救通报,基于急救通报中所含的位置信息来启动最靠近所述位置而设置的急救机器人2。或者,服务器3根据急救通报,基于急救通报中所含的位置信息,将最靠近所述位置而设置的急救机器人2的位置信息发送至移动电话5-2。而且,服务器3将有急救请求的情况、所使用的急救机器人2的识别信息等发送至各终端6。
[0334]
(步骤s13b)基于急救通报中所含的位置信息,最靠近所述位置而设置的急救机器人2启动。或者,通报者基于被发送至移动电话5-2的急救机器人2的位置信息,移动到设置有急救机器人2的场所来启动急救机器人2。另外,也可由急救人员121根据急救通报来启动急救机器人2。而且,服务器3将有急救请求的情况、所使用的急救机器人2的识别信息等发送至各终端6。
[0335]
(步骤s14)急救机器人2基于急救通报中所含的位置信息而移动到所通报的位置。或者,通报者使急救机器人2移动到患者所处的位置。另外,也可由急救人员121根据急救通报进行远程操作来使急救机器人2移动到所通报的位置。
[0336]
在其他状况下,急救机器人2根据急救通报而生成从所选择的急救机器人2直至急救通报机7为止的移动路径的路径信息。接下来,急救机器人2基于所生成的路径信息,生成从急救机器人2直至急救通报机7为止的包含图像与语音信号的导航信息。接下来,急救机器人2将所收到的路径信息、导航信息告知给位于周围的人,敦促直至急救通报机7为止的移动的援助。接下来,急救机器人2基于路径信息、导航信息,从急救机器人2导航至到达急救通报机7为止。(步骤s15)急救人员121远程操作急救机器人2,例如使第一显示装置2071进行显示,或者从第一扬声器2073进行告知,或者使用指示器2113来对通报者或位于现场的人们发出指示。急救人员121远程操作急救机器人2,例如使第一显示装置2071进行显示,或者从第一扬声器2073进行告知,或者使用指示器2113来对通报者或位于现场的人们说明急救工具的使用方法,以获取患者的生命检查等医疗信息。急救机器人2将所获取的生命检查等医疗信息经由网络nw而发送至服务器3。而且,急救人员121远程操作急救机器人2,例如使第一显示装置2071进行显示,或者从第一扬声器2073进行告知,或者使用指示器2113来让通报者或位于现场的人们进行患者的处置。而且,急救人员121远程操作急救机器人2来使其获取作为周边状况的信息的环境数据(图像数据、音响信号)。急救机器人2将所获取
的环境数据经由网络nw而发送至服务器3。另外,远程操作者通过终端来进行操作指示,获取了所述操作指示的服务器3控制急救机器人2的告知部207、手2112以及指示器来进行指示或告知。而且,服务器3(病情数据控制部301、机器人数据控制部302、环境数据控制部303)基于所获取的远程指示来进行急救机器人2的臂211的动作控制、告知驱动部208的驱动控制以及拍摄装置驱动部210的驱动控制。
[0337]
(步骤s16)通报者(或位于患者周围的人)根据急救机器人2的指示来进行急救工具的取出、处理,或者使用急救工具来进行生命检查等医疗信息的获取等。
[0338]
(步骤s17)在急救机器人2到达患者的身边后,将来自急救机器人2的生命检查等医疗信息经由网络nw、服务器3而发送至正搭乘救护车的急救队111的终端6-2。另外,来自急救机器人2的生命检查等医疗信息也被发送至远程操作急救机器人2的急救人员121的终端6-3。
[0339]
(步骤s18)来自急救机器人2的生命检查等医疗信息从服务器3被发送至调度员131的终端6-5。而且,患者的个人信息(病历、经常就诊的医院等)从服务器3被发送至调度员131的终端6-5。调度员131基于终端6-5所获取的生命检查等医疗信息与个人信息来列出运送目的地医院的候选。另外,运送目的地医院的调整与决定既可由调度员131来进行,也可由服务器3来进行。
[0340]
(步骤s19)在决定了运送目的地医院后,来自急救机器人2的生命检查等医疗信息从服务器3被发送至医院100的终端6-1。接下来,服务器3将急救机器人2的拍摄装置209未通过远程操作而受到使用时的使用权给予至终端6-1的操作者(例如医生101)。由此,医生101能够独立于急救人员121的远程操作而操作例如第二拍摄装置2092来确认患者的状态等。
[0341]
(步骤s20)服务器3的运送方式判定部307基于所获取的生命检查等医疗信息、由拍摄装置209所拍摄的图像来判定处置是否已结束。另外,处置是否已结束的判定也可由急救人员121来进行。若判定为处置已结束,则例如服务器3的运送方式判定部307将出动停止请求经由网络nw而发送至急救队111的终端6-2,且安排其他的运送方式(例如出租车)。若判定为处置尚未结束,则例如服务器3的机器人数据控制部302根据远程操作来进行控制以进行告知与指示,以使得在救护车到达之前继续进行处置等,并对终端6继续发送生命检查等医疗信息与环境数据。
[0342]
(步骤s21)救护车内的终端6-1接收出动停止请求。急救队111基于所收到的结果来中止出动。
[0343]
(步骤s22)正搭乘救护车的急救队111到达患者所处的现场。
[0344]
(步骤s23)通报者等将患者交接给急救队。另外,在患者的交接后,急救机器人2例如既可由通报者返还至曾配置的场所等,也可通过远程操作而以自走的方式返回至曾配置的场所等,还可由回收车随后予以回收。
[0345]
另外,急救机器人2或服务器3除了联络急救队可否出动以外,也可向例如交通控制中心或急救中心发送交通控制信息(信号、对周围的汽车的指示(自动驾驶尤为有效))。
[0346]
另外,所述的示例中,对通报者去取急救机器人2的示例进行了说明,但并不限于此,例如,服务器3也可基于急救通报来告知位于所选择的急救机器人2周边的人援助急救机器人2移动到患者所处的位置,让位于急救机器人2周边的人来移动。
[0347]
此时,也可如下述那样进行步骤s14的处理。服务器3也可根据急救通报来生成从所选择的急救机器人2直至通报者(所使用的移动电话5-2)为止的移动路径的路径信息。接下来,服务器3也可基于所生成的路径信息来生成包含从急救机器人2直至通报者为止的图像和语音信号的导航信息。接下来,服务器3也可将所生成的路径信息、导航信息经由网络nw而发送至急救机器人2。接下来,急救机器人2也可将所接收的路径信息、导航信息告知给位于周围的人,以敦促其援助急救机器人2移动到通报者。并且,急救机器人2也可基于路径信息、导航信息而从急救机器人2导航到通报者。
[0348]
另外,图24所示的处理流程为一例,并不限于此。也可同时进行若干个处理,还可调换流程。
[0349]
而且,所述的示例中,当急救机器人2通过远程操作而利用臂211进行指示等时,根据服务器3的控制指令信息,急救机器人2将臂211从臂收纳部214中取出后进行作业,待作业结束后,将臂211收纳至臂收纳部214。
[0350]
另外,在急救机器人2根据远程操作来进行患者的处置或生命检查等医疗信息的获取或援助的情况下,也可如以下那样进行步骤s15、步骤s16的处理。
[0351]
(步骤s15)急救人员121远程操作急救机器人2来对患者进行处置,或者使用急救用的工具来获取生命检查等医疗信息。服务器3的机器人数据控制部302根据远程指示,来生成对患者进行处置或者使用急救用的工具来获取生命检查等医疗信息的臂211的控制指令信息。机器人数据控制部302将所生成的控制指令信息发送至急救机器人2。而且,机器人数据控制部302也可控制臂211或指示器2113等,进行对患者进行处置或者使用急救用的工具来获取生命检查等医疗信息时的辅助等的协助指示。
[0352]
(步骤s16)若从急救机器人2有协助请求的指示,则通报者(或位于患者周围的人)也可根据急救机器人2的指示,来进行急救工具的取出或取出的辅助、处理或者使用急救工具来进行生命检查等医疗信息的获取时的辅助等。
[0353]
另外,急救机器人2或服务器3除了联络急救队111可否出动以外,还可生成运送路线的交通控制信息(信号、对周围的汽车的指示(自动驾驶时尤为有效))。急救机器人2或服务器3也可将所生成的交通控制信息发送至例如交通控制中心或急救中心。由此,根据本实施方式,可根据反应方式来进行运送路线的交通控制。
[0354]
另外,在进行急救机器人2的远程操作的情况下,进行远程操作的急救人员121所使用的终端6-1的操作部603也可为佩戴在操作者的手上的触觉数据球。触觉数据球通过触觉数据球所包括的传感器来检测方位或者各手指的活动、手的活动或臂的活动,并将检测出的操作者传感器值发送至服务器3。传感器例如是加速度传感器、陀螺仪传感器、磁传感器等。另外,触觉数据球也可包括反馈部件。反馈部件根据控制部601的控制,向操作者反馈来自急救机器人2的末端执行器的反馈信息(压力、温度等)。而且,终端6-1的图像显示部604也可为头戴显示器(head mount display,hmd。在hmd显示急救机器人2所拍摄的图像。而且,hmd也可包括对操作者的视线信息进行检测的视线检测器。此时,将检测出的视线信息发送至服务器3。
[0355]
进而,急救机器人2的控制部201也可通过将所述的操作者传感器值与视线信息输入至学习完毕的模型,来推测操作者将要进行的动作的意图。由此,控制部201即便操作者未进行准确的对位也能够实现作业,因此能够以高精度来使急救机器人2进行作业。另外,
学习完毕的模型例如是预先输入操作者传感器值与视线信息,将操作者将要进行的作业作为教学数据来进行学习。
[0356]
如上所述,本实施方式的急救机器人2能够进行远程操作,且包括收纳有急救用工具的救生器具收纳部213与移动部件212。如上所述,本实施方式的急救系统1包括:拍摄装置209,可对至少一个以上的位置或方向进行远程操作;救生器具收纳部213,收纳有急救用的工具;急救机器人2,包括可远程操作的至少一个末端执行器;终端6,由至少一位操作者来远程操作所述急救机器人;以及服务器3,可获取所述急救机器人所获取的病情信息和环境信息,将所获取的所述病情信息和所述环境信息发送给所述终端,从所述终端接收对所述急救机器人的操作信息,基于所接收的所述操作信息来控制所述急救机器人。
[0357]
由此,根据本实施方式,即便可实施医疗行为的人不在现场也能够通过远程操作来操作急救机器人获取病情信息,因此能够进行救护。而且,根据本实施方式,能够由多个操作者来顺利且高效地远程操作一个急救机器人,因此能够有效率地进行救护。而且,根据本实施方式,医生能够从与急救机器人的操纵者不同的视点观察患者。而且,根据本实施方式,能够在紧急事态时从选择项中选择运送方式。而且,根据本实施方式,运送方法还扩展到救护车以外的方法,因此救护车能够前往真正需要的人。而且,根据本实施方式,能够削减救护车的出动次数。而且,根据本实施方式,对于环境数据附加有在保存时进行隐私保护处理(例如模糊处理或马赛克处理)的指示,因此能够保护患者、来进行患者的处理等的人、患者周围的人的隐私。
[0358]
如上所述,本实施方式的急救系统1使用从急救机器人2获取的环境数据(现场状况和位于周围的人与人的位置)来进行以下的处理。
[0359]
i.控制部201确定操作员(例如急救人员121)进行对话的对象者的位置,并设定朝向对象者的指向性。
[0360]
ii.援助判断部218判断是否需要向周边的其他急救机器人请求援助,进而输出以下内容。
[0361]
ii-1.带有指向性地朝向对象者输出语音或图像。
[0362]
ii-2.向周边的其他急救机器人进行援助请求。
[0363]
由此,根据本实施方式,能够实现现场的安全确保、隐私保护(指示同性穿脱衣服等)。
[0364]
另外,所述的实施方式中,对一个急救机器人2进行指示或处置等的示例进行了说明,但并不限于此。急救机器人2也可根据现场的状况或患者的状态来将向周边的其他急救机器人2的援助请求经由网络nw而发送至服务器3。另外,被用于援助的其他急救机器人2也可由与正在进行处置的急救机器人2的操作者不同的操作者进行远程操作。
[0365]
如上所述,本实施方式的运送方式决定系统1包括:急救机器人2(急救装置),能够获取病情信息与环境信息;服务器3,获取从急救装置所获取的环境信息与病情信息;终端6,能够获取病情信息与环境信息,且能够对急救装置进行远程操作,并将基于所获取的病情信息与环境信息而判断的判断结果发送至服务器3;以及运送方式判定部307,使用病情信息、环境信息以及判断结果中的至少一个信息,从多个运送方式中决定至少一个运送方式。
[0366]
由此,根据本实施方式,在紧急事态时能够从选择项中选择运送方式。而且,根据
本实施方式,运送方法也扩展至救护车以外的方法,因此救护车能够前往真正需要的人。而且,根据本实施方式,能够根据运送方式来进行交通控制的委托与交通控制。
[0367]
而且,本实施方式的急救系统1包括急救机器人2与发出急救信号的急救通报机7。
[0368]
而且,本实施方式的急救系统1包括:位置信息获取部(通信部205、通信部305),获取发出急救通报的位置信息;路径生成部(216、306),根据急救机器人2的自身位置的差异来进行从自身位置直至现场为止的路径生成;以及输出部(告知部207、通信部305),根据从路径生成部获得的信息,将直至现场为止的导航通过语音或图像而告知给周围的人。另外,位置信息获取部与路径生成部是由急救机器人2或服务器3所包括。
[0369]
由此,根据本实施方式,即便通报者不前往取用急救机器人2,也能够由位于急救机器人2附近的人带来到患者所处的位置,由此,能够缩短直至到达急救机器人2为止的时间。
[0370]
如上所述,本实施方式的急救机器人2包括:拍摄装置209,能够进行远程操作,且能够对至少一个以上的位置或方向进行远程操作;救生器具收纳部213,收纳有急救用的工具;以及能够远程操作的至少一个手2112(末端执行器)。
[0371]
而且,本实施方式的急救机器人2中,臂211包括指示器2113。
[0372]
而且,本实施方式的急救机器人2包括双臂(两个臂211)。
[0373]
而且,本实施方式的急救机器人2包括作为主要的远程操作者(例如急救人员121)以外的人(例如医生)能够远程操作的拍摄装置209(例如第二拍摄装置2092)。另外,第一拍摄装置2091例如是由急救人员121通过远程操作来使用。
[0374]
而且,本实施方式的急救机器人2搭载有多个具有指向性的告知部207(显示装置、扬声器)。
[0375]
而且,本实施方式的急救机器人2包括移动部件212。
[0376]
而且,本实施方式的急救机器人2构成为,可将包含自身的手2112的臂211收纳至急救机器人2本体。
[0377]
由此,根据本实施方式,急救人员121可借助能够远程操作的急救机器人2而通过远程操作来实施救护,到达时间也变短,因此可救助的生命变多。而且,根据本实施方式,能够减少救护车的出动次数,因此救护车可前往真正需要的人。
[0378]
[变形例]
[0379]
本变形实施方式中,如图25所示,急救机器人2a根据远程操作来进行患者的处置或者生命检查等医疗信息的获取或援助。图25是表示本变形实施方式的急救机器人系统的处理例的图。
[0380]
[急救机器人的结构例]
[0381]
首先说明急救机器人2a的结构例。
[0382]
图26是表示实施方式的急救机器人的结构例的图。如图26所示,急救机器人2a例如包括框体200、控制部201a、存储部202、驱动部203、电源204、通信部205、照明装置206、告知部207、告知驱动部208、拍摄装置209、拍摄装置驱动部210、臂211a、移动部件212、救生器具收纳部213、臂收纳部214以及拾音部215。另外,急救机器人2a也可包括路径生成部216。另外,图8所示的结构为一例,并不限于此。急救机器人2a例如也可包括其他功能部。另外,急救机器人2a也可包括三个以上的臂211。
[0383]
控制部201a除了控制部201的动作以外,还根据通信部205从服务器3a收到的远程操作指示来控制急救机器人2a的臂211的动作。由此,本实施方式中,急救机器人2a进行急救措施。另外,多个臂211也可分别由不同的操作员(例如急救人员121、辅助的急救人员123)来远程操作。
[0384]
臂211a例如安装有可拆卸的罩。其理由是因为,急救机器人2a要直接接触患者或急救用的工具等。因此,并不限于臂211a,急救机器人2a在有可能直接接触患者或急救用的工具等的其他部分也安装有可拆卸的罩。另外,罩的拆卸或更换也可构成为,罩为多层,通过拆下已使用的罩而使未使用的罩露出,还可构成为,将更换用的罩放入急救用的工具中,由患者周边的人予以更换。此种更换指示也可与第一实施方式同样地,例如由急救人员121进行远程操作来对患者周边的人进行指示。
[0385]
另外,在进行急救机器人2a的远程操作的情况下,进行远程操作的急救人员121所使用的终端6-1的操作部603也可为佩戴于操作者的手上的触觉数据球。触觉数据球通过触觉数据球所包括的传感器来检测方位或者各手指的活动、手的活动或臂的活动,并将检测出的操作者传感器值发送至服务器3a。传感器例如是加速度传感器、陀螺仪传感器、磁传感器等。另外,触觉数据球也可包括反馈部件。反馈部件根据控制部601的控制,向操作者反馈来自急救机器人2a的末端执行器的反馈信息(压力、温度等)。而且,终端6-1的图像显示部604也可为hmd(头戴显示器)。在hmd显示急救机器人2a所拍摄的图像。而且,hmd也可包括对操作者的视线信息进行检测的视线检测器。此时,将检测出的视线信息发送至服务器3a。
[0386]
进而,急救机器人2a的控制部201a也可通过将所述的操作者传感器值与视线信息输入至学习完毕的模型,来推测操作者将要进行的动作的意图。由此,控制部201a即便操作者未进行准确的对位也能够实现作业,因此能够以高精度来使急救机器人2a进行作业。另外,学习完毕的模型例如是预先输入操作者传感器值与视线信息,将操作者将要进行的作业作为教学数据来进行学习。
[0387]
[服务器的结构例]
[0388]
接下来说明服务器3a的结构例。
[0389]
图27是表示实施方式的服务器的结构例的图。如图27所示,服务器3a例如包括病情数据控制部301、机器人数据控制部302a、环境数据控制部303、存储部304、通信部305、路径生成部306、运送方式判定部307以及指向性判定部308。另外,图27所示的结构为一例,并不限于此。
[0390]
机器人数据控制部302a除了机器人数据控制部302的动作以外,还生成控制指令信息,以基于急救人员121的远程操作来操作急救机器人2a的臂211a对患者进行处置,或者使用急救用的工具来获取生命检查等医疗信息。机器人数据控制部302a将所生成的控制指令信息发送至急救机器人2a。
[0391]
[急救机器人系统1a的处理例]
[0392]
接下来,参照图3、图25至图28来说明本实施方式的急救机器人系统1a的处理例。图28是表示本实施方式的急救机器人系统的处理例的图。另外,图28中,“急救机器人”也称作“机器人”。
[0393]
(步骤s15a)步骤s14后,急救人员121远程操作急救机器人2a来对患者进行处置,或者使用急救用的工具来获取生命检查等医疗信息。服务器3a的机器人数据控制部302a生
成根据远程指示来对患者进行处置,或者使用急救用的工具来获取生命检查等医疗信息的臂211a的控制指令信息。机器人数据控制部302a将所生成的控制指令信息发送至急救机器人2a。而且,机器人数据控制部302a也可控制臂211a或指示器2113等进行对患者进行处置或者使用急救用的工具来获取生命检查等医疗信息时的辅助等的协助指示。
[0394]
(步骤s16a)通报者(或位于患者周围的人)在从急救机器人2a有协助请求的指示时,也可根据急救机器人2a的指示来进行急救工具的取出或取出的辅助、处理或者使用急救工具来获取生命检查等医疗信息时的辅助等。
[0395]
另外,图10所示的处理流程为一例,并不限于此。也可同时进行若干个处理,还可调换流程。
[0396]
如上所述,本实施方式的急救机器人2a除了急救机器人2以外,还在臂211a连接有能够对急救工具进行操作的手2112(末端执行器)。
[0397]
由此,根据本实施方式,急救人员121等能够通过远程操作来利用急救机器人2a对患者进行处置,或者使用急救用的工具来获取生命检查等医疗信息。
[0398]
另外,所述的实施方式中,对一个急救机器人2(或2a)进行指示或处置等的示例进行了说明,但并不限于此。急救机器人2(或2a)也可根据现场的状况或患者的状态来将向周边的其他急救机器人2(或2a)的援助请求经由网络nw而发送至服务器3(或3a)。另外,被用于援助的其他急救机器人2(或2a)也可由与正在进行处置的急救机器人2(或2a)的操作者不同的操作者进行远程操作。另外,也可将用于实现本发明中的急救机器人2(或2a)、服务器3(或3a)、终端6的构成元件的功能的全部或一部分的程序记录到计算机可读取的记录介质中,使计算机系统读取并执行记录在所述记录介质中的程序,由此来进行急救机器人2、服务器3、终端6所进行的处理的全部或一部分。另外,此处所说的“计算机系统”包含操作系统(operating system,os)或周边机器等的硬件。而且,“计算机系统”也包含在局域网上构建的系统或在云上构建的系统等。而且,所谓“计算机可读取的记录介质”,是指软盘、光磁盘、只读存储器(read only memory,rom)、只读光盘(compact disc read only memory,cd-rom)等的可移动介质、内置于计算机系统的硬盘等的存储装置。进而,“计算机可读取的记录介质”还包含经由国际互联网等网络或电话线路等通信线路来发送程序时的服务器、或者像成为客户端的计算机系统内部的易失性存储器(随机存取存储器(random access memory,ram))那样将程序保持一定时间的存储器。
[0399]
而且,所述程序也可从将所述程序保存在存储装置等中的计算机系统经由传输介质,或者通过传输介质中的传输波而传输至其他计算机系统。此处,传输程序的“传输介质”是指像国际互联网等网络(通信网)或电话线路等通信线路(通信线)那样具有信息传输功能的介质。而且,所述程序也可为用于实现前述的功能的一部分者。进而,也可为能够通过与已记录在计算机系统中的程序的组合来实现前述功能的、所谓的差分文件(差分程序)。
[0400]
以上,使用实施方式说明了本具体实施方式,但本发明并不受此种实施方式任何限定,可在不脱离本发明的主旨的范围内实施各种变形以及替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1