用于口腔种植牙领域的动态导航系统及使用方法
1.本发明属于医疗器械,具体涉及用于口腔种植牙领域的动态导航系统及使用方法。
背景技术:
2.在口腔种植牙领域通常会使用计算机辅助动态导航系统辅助定位种植器械和种植位点的实时相对位置,目前常用的追踪方式是通过红外光传播,即通过固定在患者术区的参考板以及安装在种植器械上的红外线发射装置发射红外线,在另一端由与显示器相连的红外线接收装置接收红外线,从而获取患者颌骨和种植器械的三维位置,以此来指导术者进行手术。红外导航系统主要有以下缺陷:1.存在红外线发射装置和接收装置,系统硬件制作成本较高;2.联接设备的电缆数量多且复杂,增加术前的准备时间;3.种植手机体积和重量较大,影响术者操作。
技术实现要素:
3.本发明在于克服现有口腔种植中红外光传播式动态导航系统的缺陷,提供一种结构简单的、体积小的、成本较低的用于口腔种植牙领域的动态导航系统及使用方法。
4.用于口腔种植牙领域的动态导航系统,其要点在于,所述系统包括锆珠、口腔cbct、种植手机、第一自识别码、第二自识别码、摄像头、计算机,锆珠用于与颌骨相对固定并作为口腔cbct的标记点,第一自识别码刚性固定在种植手机上用于标记种植手机前端的钻针位置,第二自识别码用于固定在口腔内标记种植位点,摄像头拍摄第一自识别码和第二自识别码拍摄并将拍摄到的图像发送到计算机,计算机将摄像机拍摄到的图像和口腔cbct结合得到钻针和种植位点的相对位置。
5.本发明利用第一自识别码和第二自识别码分别标记种植手机前端的钻针位置和颌骨上的种植位点位置,摄像头拍摄第一自识别码和第二自识别码并将图像发送到计算机,计算机将图像处理后获得钻针和种植位点的相对位置,并在口腔cbct上显示钻针和种植位点的位置,可用于辅助口腔种植牙操作。
6.所述锆珠数量大于1,所有锆珠固定在u形定位块上,u形定位块用于固定在牙冠。
7.拍摄口腔cbct过程中锆珠通过u形定位块固定在牙冠,与颌骨之间的相对位置固定不变,更适用于作为口腔cbct的标记点。
8.所述锆珠数量大于1,锆珠以一定间隔固定镶嵌在个性化放射导板上,放射导板用于固定在牙龈上。
9.当口腔内全部牙齿都缺失时,利用个性化放射导板固定锆珠,从而使锆珠与颌骨及种植位点的相对位置固定不变,更适用于作为口腔cbct的标记点。
10.所述第一自识别码固定在第一自识别码固定块,第一自识别码固定块刚性固定在种植手机的马达前端。
11.第一自识别码固定块固定在种植手机的马达前端,使得种植手机前端的钻针与第
一自识别码相对静止,通过二者之间的相对位置和第一自识别码的三维空间位置即可获得钻针位置。
12.所述第一自识别码固定块由圆柱形自识别码固定部、种植手机固定部及二者之间的连接杆组成,种植手机固定部用于固定在种植手机的马达前端,自识别码固定部表面粘有第一自识别码,第一自识别码固定块由刚性材料制成且重量不大于25g。
13.第一自识别码固定块由刚性材料制成且重量较轻,能够避免自识别码固定部及其上的第一自识别码在种植手机工作过程中晃动而导致的钻针和第一自识别码相对位置移动,提高钻针定位的准确性。
14.所述第二自识别码固定在第二自识别码固定块,第二自识别码固定块用于固定在口腔内与种植位点相对静止且避开种植位点的位置。
15.第二自识别码固定块固定在与种植位点相对静止的位置,通过二者之间的相对位置和第二自识别码的三维空间位置即可获得种植位点的三维空间位置,第二自识别码固定块避开种植位点能够给种植手机留出操作空间。
16.所述第二自识别码固定块与u形定位块固定连接,第二自识别码固定块由刚性材料制成且重量不大于25g。
17.第二自识别码固定块由刚性材料制成且重量较轻,能够避免第二自识别码固定块及其上的第二自识别码晃动而导致的种植位点和第二自识别码相对位置移动,提高种植位点定位的准确性。
18.本发明还提出上述用于口腔种植牙领域的动态导航系统的使用方法,操作过程为:步骤1、扫描钻针和第一自识别码获取二者的相对位置,扫描第二自识别码和锆珠获取二者的相对位置,将锆珠固定在口腔内拍摄口腔cbct影像并将口腔cbct影像上传到计算机;步骤2、利用锆珠和种植手机将实际口腔和口腔cbct配准;步骤3、通过自识别码和摄像头将种植手机和种植位置实时显示在cbct上。
19.所述步骤2具体为:种植手机前端的钻针接触口腔内u形定位块上某一锆珠,在计算机上用鼠标点击相应的锆珠即可完成该锆珠和口腔cbct的配准,完成至少4个锆珠的配准即可完成实际口腔和口腔cbct的配准。
20.所述步骤3具体为:根据第二自识别码和锆珠的相对位置及锆珠在口腔cbct的位置获得第二自识别码在口腔cbct的位置,进而获得种植位点的位置并显示在口腔cbct上;摄像头拍摄第一自识别码和第二自识别码获取二者的相对位置,根据第二自识别码在口腔cbct的位置获取第一自识别码在口腔cbct的位置,进而获得钻针的位置并显示在口腔cbct上。
21.所述摄像头每间隔一定时间拍摄自识别码将自识别码发送到系统软件,系统软件将自识别码位置转换为钻针位置及种植位点位置显示在cbct上。
22.所述一定时间为小于1毫秒。
23.时间间隔越小,能够越及时地追踪到种植位点和钻针之间的位置,有利于及时指导钻针的移动。
24.计算机通过对摄像头所获取到的自识别码图像进行特定算法解码,将图像信息转换为自识别码的空间位置信息,并通过术前扫描测量的自识别码与种植手机前端钻针以及锆珠之间的相对位置,将第一自识别码和第二自识别码位置分别转换为种植手机前端的钻
针位置和颌骨上的种植位点位置,并将得到的种植手机前端钻针位置和颌骨上的种植位点位置在动态导航系统上进行注册,标记在口腔cbct上。
25.本发明创造性地利用计算机软件、摄像头及自识别码将种植手机的位置实时显示在计算机上,通过种植手机和种植位点之间的实时位置变化,操作人员可以及时调整种植手机,有助于种植手机在预先设定的种植位点上工作。
附图说明
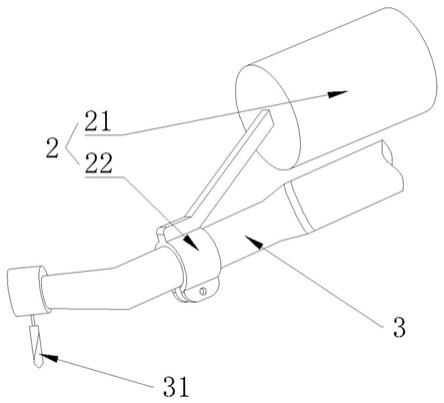
26.图1为u型定位块立体视图图2为u型定位块另一方向的立体视图图3为第一自识别码固定块及种植手机图4 为第二自识别码固定块及u形定位块图5为实施例2示意图其中:1u形定位块、11锆珠固定孔、12凹槽、13盲孔、2第一自识别码固定块、21第一自识别码固定部、22种植手机固定部、3种植手机、31钻针、4第二自识别码固定块、41第二自识别码固定部、42u形定位块固定部、5种植体、6多牙基台、7连接块、8螺栓。
具体实施方式
27.下面结合视图对本发明进行详细的描述,所列举的实施例可以使本专业的技术人员更理解本发明,但不以任何形式限制本发明。
28.实施例1如图1至图4所示,本发明提供一种用于口腔种植牙领域的动态导航系统及使用方法,所述动态导航系统包括锆珠、种植手机、自识别码、摄像头、计算机、口腔cbct。锆珠固定在口腔内,具体是利用u形定位块1开口侧的凹槽12固定在牙冠上,u形定位块1的开口侧夹紧在牙冠,另一侧设有若干锆珠固定孔11,锆珠均镶嵌在锆珠固定孔11内。口腔cbct是佩戴锆珠后拍摄并传输并显示在计算机上。所述自识别码包括第一自识别码和第二自识别码。
29.第一自识别码通过第一自识别码固定块2固定在种植手机3的马达前端,第一自识别码用于标记种植手机3前端部的钻针32的三维空间位置。所述第一自识别码固定块2由第一自识别码固定部21、种植手机固定部22及二者之间的连接杆组成,第一自识别码通过粘贴或者打印的方式固定在第一自识别码固定部21上,种植手机固定部22是c形夹,c形夹的开口端采用螺栓连接,拧紧螺栓后可将c形夹固定在种植手机3上。第一自识别码固定块2由刚性材料制成且重量不大于25g,第一自识别码固定块2由刚性材料制成且重量较轻,能够避免自识别码固定部21及其上的第一自识别码在种植手机工作过程中晃动而导致的钻针31和第一自识别码相对位置移动,提高钻针定位的准确性。
30.第二自识别码通过第二自识别码固定块4固定在口腔内,第二自识别码用于标记种植牙的种植位点的三维空间位置。第二自识别码固定块4包括第二自识别码固定部41、u形定位块固定部42及二者之间的连接杆组成,第二自识别码通过粘贴或者打印的方式固定在第二自识别码固定部41上,u形定位块固定部42插入u形定位块1的盲孔13内使第二自识别码固定块4与u形定位块1固定连接,第二自识别码固定块4重量不大于25g,第二自识别码固定块4由刚性材料制成且重量较轻,能够避免第二自识别码固定块4及其上的第二自识别
码晃动而导致的种植位点和第二自识别码相对位置移动,提高种植位点定位的准确性。摄像头固定在口腔外且能够拍摄到第一自识别码和第二自识别码的位置,摄像头将拍摄到的自识别码发送到计算机,计算机处理后将钻针和种植位点的位置实时显示在口腔cbct上。
31.本发明的创新点在于利用自识别码和摄像头将钻针和种植位点的三维空间位置实时显示在cbct上,从而根据钻针和种植位点之间的相对位置及时调整钻针31位置和方向。具体为:利用工业扫描仪器对第一自识别码与种植手机一并扫描获取3d建模文件,并扫描不同长度的钻针数据与第一自识别码结合,获取第一自识别码和不同长度钻针31的相对位置;同理,使用相同仪器扫描第二自识别码和镶嵌锆珠的u型管获取3d建模文件,获取第二自识别码与u型管及锆珠的相对位置,后续只需使用硬质自凝塑料材料将u型管固定在牙列上拍摄cbct,即可在u型管与cbct配准后获取第二自识别码和术区颌骨的相对位置,进而获得第二自识别码在口腔cbct上的具体坐标。预先确定种植位点位置,摄像头拍摄自识别码图像后发送到计算机。自识别码是由若干个图像单元——识别符组成,识别符通过特定的序列排列组合成自识别码,即利用识别符的有序排列对自识别码进行编码,计算机根据摄像头拍摄到的自识别码图像上的识别符的特定排列序列,将识别符的序列信息通过设计的算法解码,转换为自识别码的定位信息,从而确定第一自识别码和第二自识别码之间的相对三维空间位置,计算机利用第一自识别码和钻针之间的相对位置及第一自识别码三维空间位置计算出钻针的三维空间位置,计算机利用第二自识别码和种植位点之间的相对位置及第二自识别码三维空间位置计算出种植位点的三维空间位置,将钻针和种植位点的三维空间位置和cbct结合并显示在cbct上。具体结合方法:执行种植操作前使用硬质自凝塑料将镶嵌有锆珠的u型管固定在患者术区颌骨的非种植牙位后拍摄口腔cbct,将cbct数据导入本发明所述的导航系统,接着使用已完成空间定位的种植手机前端的钻针停靠在患者口内u型管上的锆珠,同时在导航系统上用鼠标选中cbct上对应的锆珠影像(锆珠在cbct图像上呈高密度影像),此时即完成了一个锆珠与cbct之间的配准,同样操作重复至少3次即可完成至少4个锆珠的配准。由于第二自识别码是固定在u型管,所以锆珠与u型管以及第二自识别码的相对位置是固定的,由此可完成第二自识别码与cbct之间的结合。同样地,第一自识别码与第二自识别码都是由同一个摄像头拍摄并且由同一个导航系统定位,且钻针与第一自识别码的相对位置是固定的,即同时完成了钻针与cbct的结合。
32.本发明所述导航系统的使用方法为:1、准备:种牙患者佩戴u形定位块拍摄口腔cbct并发送到计算机上;2、显示:利用计算将钻针和种植位点实时三维空间位置显示在cbct上;3、配准:采用钻针触碰某一锆珠并在cbct上点击相应锆珠进行实际口腔和口腔cbct配准;4、多点配准:重复步骤3至少三次;5、配准验证:采用钻针点击配准点以外的任意锆珠,观察是否位于口腔cbct上的同一锆珠,若是则配准结束,若否则依次重复步骤3至步骤5。完成配准后,操作者可在计算机上观察到钻针和种植位点的位置,摄像头每隔一段时间将自识别码的图像发送到计算机,而且时间间隔小于1毫秒,操作过程中可根据预先确定的种植位点位置随时调整钻针的位置和角度。
33.实施例2本实施例与实施例1的区别在于:本例是适用于口腔内没有剩余牙齿或牙齿状况较差导致无法佩戴u形定位块的情况,因此锆珠的固定方式和第二自识别码的固定方式以及相应的准备步骤与实施例1不同。
34.锆珠的固定方式:由于无法佩戴固定在牙冠上的u形定位块,制作可以佩戴在牙龈上的个性化放射导板,在放射导板上设计可以固定锆珠的若干锆珠固定孔,以此将锆珠固定在口腔内。
35.如图5所示,第二自识别码的固定方式:第二自识别码通过多牙基台5和种植体6固定在口腔内,放射导板上设有一个牙位的孔洞,种植体通过所述孔洞固定在颌骨上,种植体5和多牙基台6采用螺纹固定连接,多牙基台6上方设有连接块7,螺栓8穿过连接块7中间的通孔与多牙基台6螺纹连接,从而将连接块7固定,第二自识别码固定在连接块7上。
36.本实施例由于与实施例1硬件不同,步骤1准备阶段的操作方法也有所不同,本实施例的步骤1为:准备:将放射导板固定在种牙患者的口腔内拍摄口腔cbct并发送到计算机上,将种植体植入颌骨,第二自识别码通过连接块7及多牙基台6固定在种植体5。其余步骤与实施例1相同,此处不再赘述。
37.以上实施例仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改进与等同替换,均落入本发明保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1