上钉组件以及上钉导航系统的制作方法
1.本发明涉及骨科上钉系统技术领域,特别是涉及一种上钉组件以及上钉导航系统。
背景技术:
2.骨科手术中,一般需要在骨骼上植入螺钉,植入螺钉通常采用上钉组件。采用现有的上钉组件植入螺钉时,无法确定所植入的螺钉的位置。如何设计一种能够获得植入骨骼的螺钉的准确位置的上钉组件是本领域技术人员需要解决的问题。
技术实现要素:
3.鉴于以上所述现有技术的缺点,本发明解决的技术问题在于提供一种能够获得植入骨骼的螺钉的准确位置的上钉组件以及上钉导航系统。
4.为实现上述目的及其他相关目的,本发明提供一种上钉组件,包括:起子杆、导引部件和光学示踪器;
5.所述导引部件为条状结构;沿着所述导引部件的轴向,所述导引部件的外侧横截面的尺寸相同;所述导引部件具有定位轴向通孔,所述导引部件的下部与螺钉可拆卸式连接;
6.所述起子杆穿入所述导引部件的定位轴向通孔中;所述起子杆的下端与螺钉可拆卸式连接,所述光学示踪器安装在所述起子杆上;
7.当所述导引部件和所述起子杆均与螺钉连接时,所述螺钉的中轴线与所述起子杆的中轴线共线,沿着所述螺钉的中轴线所在的方向,所述光学示踪器与所述螺钉之间的距离固定;当所述起子杆绕着所述螺钉的中轴线转动且所述起子杆驱动所述螺钉沿着所述螺钉的中轴线所在的方向移动时,所述起子杆通过所述螺钉带动所述导引部件绕着所述螺钉的中轴线转动。
8.优选地,所述螺钉的钉座的顶面上设有收纳槽,所述收纳槽的槽壁上设有承接部;所述导引部件的下部设有与所述承接部可拆卸式连接的安装部;所述起子杆的下端设有用于插入所述收纳槽的定位部件;当所述起子杆的定位部件置入于所述收纳槽中后,驱动所述导引部件向下移动,所述安装部与所述承接部可拆卸式连接,且所述导引部件压住所述定位部件。
9.优选地,所述起子杆的外侧面上设有限位凸起,所述起子杆的外侧面上还设有限位件,所述限位件处于所述限位凸起的上方;
10.所述光学示踪器通过示踪器接头与所述起子杆连接,所述示踪器接头包括接头套筒和与所述接头套筒的外侧面连接的支撑件,所述接头套筒套在所述起子杆上,所述接头套筒处于所述限位件与所述限位凸起之间,所述限位件与所述限位凸起之间的距离等于所述接头套筒的轴向高度,所述接头套筒与所述起子杆为间隙配合,所述接头套筒可绕着所述起子杆转动;所述支撑件与所述光学示踪器连接。
11.进一步地,所述限位凸起是设置于所述起子杆的外周面上的环状结构;所述限位件为绕设于所述起子杆的外侧面上的限位环。
12.进一步地,所述支撑件通过示踪器套筒与所述光学示踪器连接,所述示踪器套筒上设有套筒连接孔;所述支撑件上设有支撑部安装孔,所述示踪器套筒套在所述支撑件上;连接件依次穿过所述套筒连接孔和所述支撑部安装孔,将所述支撑件和所述示踪器套筒串联连接。
13.更进一步地,所述支撑件为圆柱形结构,所述支撑件的轴向与所述接头套筒的轴向垂直。
14.优选地,所述起子杆的上端设有手柄。
15.优选地,所述导引部件的上端的外周面设有旋钮。
16.优选地,所述的上钉组件,还包括导向器,所述导向器包括导向筒和连接杆,所述连接杆的一端与所述导向筒的外侧面连接,所述连接杆的另一端与机械臂连接,所述导向筒上具有供所述导引部件插入的筒体轴向通孔。
17.本发明还一种上钉导航系统,包括:控制器、显示器和所述的上钉组件;所述显示器和所述上钉组件的光学示踪器均与所述控制器连接。
18.如上所述,本发明的上钉组件以及上钉导航系统,具有以下有益效果:
19.本发明的上钉组件,在进行上钉时,将导引部件与螺钉连接,将起子杆与螺钉连接,则导引部件锁定即将植入的螺钉;螺钉的中轴线与起子杆的中轴线共线,则沿着所述螺钉的中轴线所在的方向,光学示踪器与螺钉之间的距离固定;转动起子杆,起子杆带动螺钉拧入,进行置钉操作;由于光学示踪器与螺钉之间的距离固定,所以根据光学示踪器的位置就能够确定螺钉植入的位置;当置钉操作完成后,将导引部件与螺钉拆卸,将起子杆与螺钉拆卸,从而将上钉组件取下;本发明的上钉组件的包括光学示踪器,则医护人员在进行置钉操作时,能够获取螺钉的实时行程,从而确保置钉过程的准确性和安全性。
附图说明
20.图1显示为实施例的上钉组件与螺钉连接,且上钉组件插入于导向器中的结构示意图。
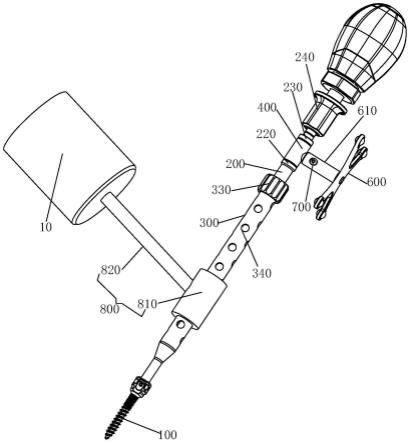
21.图2显示为实施例的上钉组件与螺钉连接的立体结构示意图。
22.图3显示为图2的a处的放大结构示意图。
23.图4显示为实施例的上钉组件与螺钉连接的结构示意图。
24.图5显示为图4的b-b向的剖面结构示意图。
25.图6显示为图5的c处的放大结构示意图。
26.图7显示为实施例的螺钉的立体结构示意图。
27.图8显示为实施例的上钉组件的导引部件的立体结构示意图。
28.图9显示为实施例的上钉组件的起子杆上设置定位部件的立体结构示意图。
29.图10显示为图9的d处的放大结构示意图。
30.图11显示为实施例的上钉组件的定位部件的立体结构示意图。
31.图12显示为实施例的光学示踪器与示踪器套筒连接的立体结构示意图。
32.图13显示为实施例的导向器与机械臂连接的立体结构示意图。
33.图14显示为实施例的上钉组件在控制器控制下的原理图。
34.附图标号说明
35.100
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
螺钉
36.110
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
钉体
37.120
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
钉座
38.121
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
收纳槽
39.122
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
承接部
40.200
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
起子杆
41.201
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杆主体
42.202
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杆延伸部
43.210
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
定位部件
44.220
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
限位凸起
45.230
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
限位件
46.240
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
手柄
47.250
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
凸缘
48.300
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导引部件
49.310
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
定位轴向通孔
50.320
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
安装部
51.330
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
旋钮
52.400
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
示踪器接头
53.410
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
接头套筒
54.420
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
支撑件
55.421
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
支撑部安装孔
56.600
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
光学示踪器
57.610
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
示踪器套筒
58.611
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
套筒连接孔
59.700
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
连接件
60.800
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导向器
61.810
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导向筒
62.811
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
筒体轴向通孔
63.820
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
连接杆
64.910
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制器
65.920
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
显示器
66.930
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
接收器
67.10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机械臂
具体实施方式
68.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
69.请参阅附图。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
70.如图1至图13所示,本实施例的上钉组件,与螺钉100可拆卸式连接;包括:起子杆 200、导引部件300和光学示踪器600;
71.导引部件300为条状结构;沿着导引部件300的轴向,导引部件300的外侧横截面的尺寸相同;导引部件300具有定位轴向通孔310,导引部件300的下部与螺钉100可拆卸式连接;
72.起子杆200穿入导引部件300的定位轴向通孔310中;起子杆200的下端与螺钉100可拆卸式连接,光学示踪器600安装在起子杆200上;
73.当导引部件300和起子杆200均与螺钉100连接时,螺钉100的中轴线与起子杆200的中轴线共线,沿着螺钉100的中轴线所在的方向,光学示踪器600与螺钉100之间的距离固定;当起子杆200绕着螺钉100的中轴线转动且起子杆200驱动螺钉沿着螺钉100的中轴线所在的方向移动时,起子杆200通过螺钉100带动导引部件300绕着螺钉100的中轴线转动。
74.本发明的上钉组件,在进行上钉时,将导引部件300与螺钉100连接,将起子杆200与螺钉100连接,则导引部件300锁定即将植入的螺钉100;螺钉100的中轴线与起子杆200 的中轴线共线,则沿着螺钉100的中轴线所在的方向,光学示踪器600与螺钉100之间的距离固定;转动起子杆200,起子杆200带动螺钉100拧入椎体中,进行置钉操作;由于光学示踪器600与螺钉100之间的距离固定,所以根据光学示踪器600的位置就能够确定螺钉100 植入的位置,也就是说,根据光学示踪器600的位置就能够确定螺钉100的前进距离;当置钉操作完成后,将导引部件300与螺钉100拆卸,将起子杆200与螺钉100拆卸,从而将上钉组件取下;本发明的上钉组件的包括光学示踪器600,则医护人员在进行置钉操作时,能够获取螺钉100的实时行程,从而确保置钉过程的准确性和安全性。在螺钉100旋转前进的过程中,上钉组件的起子杆200和导引部件300能够围绕螺钉的中轴线转动。本实施例中,沿着螺钉100的中轴线所在的方向,光学示踪器600与螺钉100之间的距离为图2中标记的 l。
75.螺钉100包括相连接的钉体110和钉座120,钉座120的顶面上设有收纳槽121,收纳槽 121的槽壁上设有承接部122;导引部件300的下部设有与承接部122可拆卸式连接的安装部 320;起子杆200的下端设有用于插入收纳槽121的定位部件210;当起子杆200的定位部件 210置入于收纳槽121中后,驱动导引部件300向下移动,安装部320与承接部122可拆卸式连接,且导引部件300压住定位部件210。钉体110的中轴线为螺钉100的中轴线。
76.在进行上钉时,将起子杆200的下端的定位部件210置入于收纳槽121中,旋动导引部件300,使得导引部件300能够向下移动,导引部件300能够压住起子杆200下端的定位部件210,则导引部件300锁定即将植入的螺钉100;转动起子杆200,带动起子杆200将螺钉 100拧入,进行置钉操作;由于光学示踪器600与螺钉100之间的距离固定,所以根据光学示踪器600的位置就能够确定螺钉100植入的位置;当置钉操作完成后,旋动导引部件300,使
得导引部件300能够向上移动,导引部件300能够脱离螺钉100,然后将起子杆200从钉座120的收纳槽121中移出,从而将上钉组件取下。
77.在进行上钉时,驱动导引部件300向下移动,导引部件300能够压住起子杆200下端的定位部件210向下移动,直到起子杆200下端的定位部件210与收纳槽121的槽底面接触,则上钉组件能够稳固地把持住螺钉100。
78.起子杆200的外侧面上设有限位凸起220,起子杆200的外侧面上还设有限位件230,限位件230处于限位凸起220的上方;
79.光学示踪器600通过示踪器接头400与起子杆200连接,示踪器接头400包括接头套筒 410和与接头套筒410的外侧面连接的支撑件420,接头套筒410套在起子杆200上,接头套筒410处于限位件230与限位凸起220之间,限位件230与限位凸起220之间的距离等于接头套筒410的轴向高度,接头套筒410与起子杆200为间隙配合,接头套筒410可绕着起子杆200的中轴线转动;支撑件420与光学示踪器600连接。
80.接头套筒410套在起子杆200上,接头套筒410处于限位件230与限位凸起220之间,限位件230与限位凸起220之间的距离等于接头套筒410的轴向高度,接头套筒410与起子杆200为间隙配合,接头套筒410可绕着起子杆200的中轴线转动;由于置钉操作中,光学示踪器600可能被医生或设备等遮挡,所以在置钉操作前以及置钉操作中,驱动接头套筒410 绕着起子杆200转动,光学示踪器600随着接头套筒410转动,则光学示踪器600的位置能够不断进行调整,光学示踪器600能够调整到不被遮挡的位置,且光学示踪器600在转动过程中,光学示踪器600与螺钉100之间的距离是固定不变的。
81.为了便于光学示踪器600的安装,支撑件420通过示踪器套筒610与光学示踪器600连接,示踪器套筒610上设有套筒连接孔611;支撑件420上设有支撑部安装孔421,示踪器套筒610套在支撑件420上;连接件700依次穿过套筒连接孔611和支撑部安装孔421,将支撑件420和示踪器套筒610串联连接,则光学示踪器600连同示踪器套筒610能够方便从支撑件420上拆卸下来。
82.支撑件420上的支撑部安装孔421为螺纹孔或光孔,支撑部安装孔421能够通过连接件 700与示踪器套筒610连接。连接件700为钉子或销轴。
83.起子杆200包括杆主体201和杆主体201的下端连接的杆延伸部202,杆主体201与导引部件300为间隙配合,杆延伸部202的下端连接定位部件210。杆主体201为圆柱形杆件。
84.示踪器套筒610供支撑件420插入,示踪器套筒610与支撑件420之间形成间隙配合,防止光学示踪器600产生晃动。示踪器套筒610上具有套筒连接孔611,套筒连接孔611与支撑件420上的支撑部安装孔421位置相对应。支撑件420插入套管示踪器套筒610后,套筒连接孔611对齐支撑部安装孔421,然后安装连接件700,光学示踪器600即稳固的连接到示踪器接头400上。
85.定位部件210可通过焊接等方式与起子杆200焊接,定位部件210也可以与起子杆200 一体加工成型。定位部件210插入于螺钉100的钉座120的收纳槽121中。旋动起子杆200 可驱动螺钉100。
86.定位部件210为定位块,定位部件210的底面为向下凸出的圆弧面,收纳槽121的槽底面为与圆弧面弧度相等的圆弧形结构。该定位部件210的底面的结构便于定位部件210插入到收纳槽121中,且使得定位部件210能够稳定地安装在收纳槽121中。定位部件210的外
侧面上具有相对设置的凸缘250,凸缘250能够进一步限制起子杆200与螺钉100之间的相对转动。
87.导引部件300上端的外侧面上设有旋钮330,旋钮330可通过焊接等方式与导引部件300 连接,也可以与导引部件300一体加工成型。
88.支撑件420为圆柱形结构,支撑件420的轴向与接头套筒410的轴向垂直。该结构便于确定光学示踪器600与螺钉100之间的距离。
89.承接部122为设置在收纳槽121的槽壁上的内螺纹部;安装部320为设置在导引部件300 的外侧面上的外螺纹部。承接部122与安装部320连接时,内螺纹部与外螺纹部形成螺纹啮合连接的结构,该结构便于承接部122与安装部320的加工和安装。旋动旋钮330,可将导引部件300的末端的外螺纹部拧入螺钉100的内螺纹部,导引部件300拧紧后,可稳定的把持螺钉100。
90.导引部件300的外侧面为圆柱形。导引部件300的外面上设有多个侧面通孔340,侧面通孔340的设置不仅能够减轻导引部件300的重量,还为导引部件300内部提供消毒通道。
91.限位凸起220是设置于起子杆200的外周面上的环状结构;限位件230为绕设于起子杆 200的外侧面上的限位环。限位凸起220和限位件230便于加工,且能够保证接头套筒410 可绕着起子杆200的中轴线转动,也就是说,接头套筒410不能沿起子杆200的轴向移动,接头套筒410仅能绕起子杆200的中轴线旋转,从而使光学示踪器600能准确反映上钉组件及螺钉100的定位。
92.为了便于旋转起子杆200,在起子杆200的上端设有手柄240。手柄240与起子杆200为可拆卸式连接。
93.为了便于旋转导引部件300,导引部件300的上端的外周面设有旋钮330。
94.上钉组件,还包括导向器800,导向器800包括导向筒810和连接杆820,连接杆820的一端与导向筒810的外侧面连接,连接杆820的另一端与机械臂10连接,导向筒810上具有供导引部件300插入的筒体轴向通孔811。导引部件300插入导向筒810的筒体轴向通孔811 上,导向筒810对于螺钉100的安装起到导向作用。待导向器800定位后,插入导引部件300,转动起子杆200,带动起子杆200将螺钉100拧入。本实施例中,导引部件300为筒状结构,筒体轴向通孔811与导引部件300为间隙配合,机械臂10安装在手术机器人上。由于导引部件300为条状结构,且沿着导引部件300的轴向,导引部件300的外侧横截面的尺寸相同;则导引部件300具有均匀的外轮廓面,且导引部件300具有一定长度,导引部件30能够在导向筒810中沿着确定的方向运动且导引部件30具有足够的行程。
95.本实施例的上钉导航系统,包括:控制器910、显示器920和上钉组件;显示器920和上钉组件的光学示踪器600均与控制器910连接。控制器910实时获取光学示踪器600的位置信息,控制器910根据光学示踪器600的位置信息,计算出螺钉100的植入位置,且控制器910将植入位置显示在显示器920上。控制器910安装在手术机器人上。控制器910通过接收器930与光学示踪器600连接,接收器930将接受到的光学示踪器600的位置信息传送给控制器910。
96.手术机器人的机械臂10末端的导向器800完成定位后,该上钉组件在导向器800的辅助下,仅需旋动手柄240,即可完成精确的置钉过程。由于上钉组件集成安装了光学示踪器 600,安装在上钉组件的末端的螺钉100的位置经控制器910处理后出现在显示器920上,
医生可直接读取内植物螺钉100的实时行程,整个上钉过程实现可视化。上钉导航系统的上钉组件能借助手术机器人的控制器910实时导航定位。
97.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1