一种跌倒防护装置及防护方法与流程
1.本发明涉及一种安全设备,具体是一种跌倒防护装置及防护方法。
背景技术:
2.意外跌倒在地面而受伤,叫做跌仆伤。跌仆伤的原因有许多,如下雪、下雨、泥泞、大理石地板、地面路滑而跌倒;道路不平、碰障碍物而绊倒;快跑快走时,身体重心失去平衡、从椅子、凳子、楼梯上跌下,骑在马、牛、骆驼背上不慎跌下,人流拥挤致跌倒等等。
3.跌伤的轻重程度和跌伤的位置有关,跌伤者有可能是老人与小儿。老人骨质疏松,血管弹性差,万一跌伤头部,容易造成颅内出血;跌倒后四肢骨折的机会多,跌伤臀部可引起股骨颈骨折,愈合困难。
4.目前并无完全有效的器材能够辅助老人行走,以在老人即将摔倒之前对其进行防护。
技术实现要素:
5.本发明的目的在于提供一种跌倒防护装置及防护方法,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:
7.一种跌倒防护装置,包括架体,所述架体两端均开设有镂空槽,在其中一端的镂空槽中安装有移动轮,另一端的镂空槽中安装有转向轮;
8.所述移动轮连接安装于所述架体上的动力组件,且在所述架体上还设置有膨胀防护机构,架体上靠近转向轮的一端上方设置有捕捉跟踪机构,所述捕捉跟踪机构与设置在所述架体上的转向结构通讯,所述转向轮与所述转向结构连接;所述捕捉跟踪机构和膨胀防护机构均与所述动力组件连接,所述膨胀机构通过主机与所述捕捉跟踪机构通讯;
9.所述动力组件带动所述捕捉跟踪机构时刻捕捉用户的身影;当用户的身影方向偏转时,捕捉跟踪机构向转向结构发送转向信号,通过转向结构带动转向轮跟随用户转向;
10.所述动力组件带动所述移动轮转动,配合转向轮带动整个装置跟随用户行走,当用户的身影发生倾斜时,通过主机判断用户是否存在摔倒风险,若存在摔倒风险,则主机控制膨胀防护机构打开,以在用户周边形成防护圈。
11.如上所述的跌倒防护装置:所述架体的一端镂空槽中转动设置有行走轴,移动轮固定在所述行走轴的两端;所述动力组件连接所述行走轴;
12.所述架体的另一端的镂空槽的内壁两侧对称固定设置有一个卡块,所述卡块上设置有凹槽,所述转向轮转动设置在方向轴的下部,且方向轴上设置有一段球型的凸起,所述球型凸起与所述凹槽活动卡合;
13.所述凹槽的截面呈与球型的凸起相适配的球型槽,且凹槽的上下部均为平直状,球型的凸起上下部也呈平直状。
14.如上所述的跌倒防护装置:所述架体上靠近行走轴的一端固定有支撑板,所述动
力组件包括安装在所述支撑板上的马达、连接所述马达输出端的主轴、用于将主轴的转矩传递至行走轴的锥齿轮组;
15.所述锥齿轮组包括固定在所述主轴端部的第一锥齿轮和固定在所述行走轴上并与第一锥齿轮啮合的第二锥齿轮;
16.其中,所述马达的电源输入端与内置于架体中的电源相连接,且电源通过远程无线开关控制其与马达的导通。
17.如上所述的跌倒防护装置:所述捕捉跟踪机构包括固定在所述方向轴远离转向轮一端的托板和通过摆动组件安装于所述托板上的红外捕捉器;
18.所述摆动组件连接所述动力组件中的主轴,所述摆动组件在所述主轴通过锥齿轮组驱动行走轴转动时,带动所述红外捕捉器来回摆动捕捉用户身影。
19.如上所述的跌倒防护装置:所述转向结构包括安装在所述架体上的电机,所述电机的输出端通过第二传动件连接方向轴;
20.所述电机与主机通讯;所述摆动组件包括转动设置在所述托板上的托柱,所述托柱上固定有承托件,所述红外捕捉器固定安装在所述承托件上,且所述承托件通过偏心结构与所述主轴连接。
21.如上所述的跌倒防护装置:所述偏心结构包括转动设置在所述托板上的摆轴、固定在所述摆轴上的大齿轮、转动设置在所述托板上的传动轴、固定在所述传动轴上并与大齿轮啮合的小齿轮、以及固定在所述传动轴顶部的偏心轮;
22.所述偏心轮的偏心处固定有凸柱,所述承托件的下部固定有同所述凸柱滑动嵌合的槽板;所述主轴通过第一传动件与所述摆轴连接。
23.如上所述的跌倒防护装置:所述膨胀防护机构包括安装在所述架体上的高压箱、设置在所述高压箱上并与高压箱连通的泵气组件、对称设置在所述高压箱两侧的膨胀结构;
24.所述泵气组件连接所述主轴,且所述膨胀结构包括安装在所述高压箱两侧的电磁阀,所述电磁阀的端部设置有防护气囊,所述电磁阀与所述主机通讯,且在所述高压箱的底部设置有溢流阀。
25.如上所述的跌倒防护装置:所述泵气组件包括固定设置在所述高压箱上的注射筒、密封滑动设置在所述注射筒内的密封塞、以及穿过所述注射筒一端并与注射筒滑动配合的压缩杆;
26.所述压缩杆伸入到所述注射筒内的一端与所述密封塞固定,在所述注射筒的一侧上部设置有进气口,所述进气口处安装有单向阀,注射筒远离压缩杆的一端设置有出气口,出气口通过另一单向阀和导气管与所述高压箱连通;所述主轴通过弹性复位结构与所述压缩杆连接。
27.如上所述的跌倒防护装置:所述弹性复位结构包括转动设置在所述压缩杆伸出所述注射筒外的一端上的滚轮,所述滚轮与固定在所述主轴上的凸轮滚动配合;
28.在所述压缩杆的外部套设有一圈柱形弹簧,所述柱形弹簧的一端抵接在压缩杆靠近滚轮处的凸板上,另一端抵接在所述注射筒的端头。
29.一种跌倒防护方法,包括如下步骤:
30.步骤一,身影获取与分析,通过红外捕捉器采集用户身影图像并发送至主机,利用
主机分析身影躯干与地面的偏移角度;
31.步骤二,跌倒识别,主机基于深度卷积神经网络的人体姿态关键点获取,用预设模型的神经网络,自二维图像中获得多个人体关键点及其在图像坐标系的对应坐标;而后主机取得的人体骨骼在图像坐标系的关键点坐标,构建代表人体主躯干及腿部的向量,获得人体腿部相对于地面垂线的偏移角;
32.步骤三,基于公开跌倒视频库抽选动作帧形成关键图像的数据集,数据集对应的人体倾斜姿态特征可构成包含人体主躯干与腿部偏移角的特征向量,以高斯核密度估计拟合特征向量各属性值在跌倒行为及非跌倒行为的概率密度分布状况;
33.步骤四,以基于人体下降姿态动态特征的阈值判断作为跌倒识别算法的补充条件;在支持向量机将人体行为分类为跌倒后,若人体质心下降程度超过阈值则将其判定为跌倒行为,否则仍视为非跌倒行为;
34.步骤五,抽取多个跌倒动作与站立、行走、下蹲等多个日常活动动作,形成数据集对跌倒识别方法进行测试;参考图像检测相关评价指标,通过精确率、准确率及召回率评价测试效果;
35.步骤六,基于人体下降姿态动态特征的阈值判断作为判别人体跌倒的补充条件,以减少误判,降低本文方法识别跌倒的召回率;
36.步骤七,防护动作启动,若主机判断人体倾斜姿态动态特征没有表现出跌倒倾向,则保持膨胀防护机构不动作;当主机判断用户行为存在跌倒风险时打开膨胀防护机构,在用户周边形成防护圈。
37.与现有技术相比,本发明的有益效果是:本发明中通过设置的动力组件分别驱动整个装置行走和红外捕捉器的摆动,利用红外捕捉器摆动追踪用户身影,以向主机发送用户行走的偏转方向,配合转向结构带动转向轮偏转,保持该装置始终跟随用户;且红外捕捉器的摆动中线始终跟随用户的行走轨迹,在转向的同时并不会因为摆动与动力组件联锁而影响其朝向,具有实时跟随的功能,智能化程度高,防护更加全面有效。
附图说明
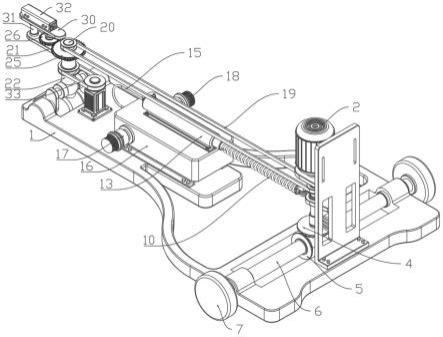
38.图1为跌倒防护装置的结构示意图。
39.图2为跌倒防护装置另一方位的结构示意图。
40.图3为跌倒防护装置中将高压箱和行走轴从架体中分离时的结构示意图。
41.图4为跌倒防护装置中弹性复位结构和注射筒的局部拆解图。
42.图5为跌倒防护装置中捕捉跟踪机构从架体中分离后的爆炸图。
43.图6为跌倒防护装置中偏心结构的结构示意图。
44.图7为跌倒防护装置中偏心轮和凸柱同大齿轮及小齿轮的配合图。
45.图8为跌倒防护装置中将承托件和托柱从托板上拆离时的结构示意图。
46.图9为跌倒防护装置中防护气囊完全膨胀后的结构示意图。
47.图中:1、架体;2、马达;3、主轴;4、第一锥齿轮;5、第二锥齿轮;6、行走轴;7、移动轮;8、凸轮;9、压缩杆;10、柱形弹簧;11、密封塞;12、滚轮;13、注射筒;14、单向阀;15、导气管;16、高压箱;17、电磁阀;18、防护气囊;19、第一传动件;20、摆轴;21、托板;22、方向轴;23、转向轮;24、凹槽;25、大齿轮;26、小齿轮;27、偏心轮;28、凸柱;29、槽板;30、承托件;31、
托柱;32、红外捕捉器;33、第二传动件;34、电机。
具体实施方式
48.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
49.请参阅图1~图9,作为本发明的一种实施例,所述跌倒防护装置,包括架体1,所述架体1两端均开设有镂空槽,在其中一端的镂空槽中安装有移动轮7,另一端的镂空槽中安装有转向轮23;
50.所述移动轮7连接安装于所述架体1上的动力组件,且在所述架体1上还设置有膨胀防护机构,架体1上靠近转向轮23的一端上方设置有捕捉跟踪机构,所述捕捉跟踪机构与设置在所述架体1上的转向结构通讯,所述转向轮23与所述转向结构连接;所述捕捉跟踪机构和膨胀防护机构均与所述动力组件连接,所述膨胀机构通过主机(图中未示出)与所述捕捉跟踪机构通讯;
51.所述动力组件带动所述捕捉跟踪机构时刻捕捉用户的身影;当用户的身影方向偏转时,捕捉跟踪机构向转向结构发送转向信号,通过转向结构带动转向轮23跟随用户转向;
52.所述动力组件带动所述移动轮7转动,配合转向轮23带动整个装置跟随用户行走,当用户的身影发生倾斜时,通过主机判断用户是否存在摔倒风险,若存在摔倒风险,则主机控制膨胀防护机构打开,以在用户周边形成防护圈。
53.具体来说,捕捉跟踪机构在用户身后采集rgb图像信息并发送至主机,主机从采集的图像中获取人体姿态关键点;利用人体姿态关键点获取人体主躯干相对于地面垂线的偏移角和腿部相对于地面垂线的偏移角,以此表征人体倾斜姿态动态特征,并通过支持向量机构建的分类器依据上述特征识别跌倒行为。
54.进一步地,识别跌倒行为时,主机基于深度卷积神经网络的人体姿态关键点获取,用预设模型的神经网络,自二维图像中获得多个人体关键点及其在图像坐标系的对应坐标;而后主机取得的人体骨骼在图像坐标系的关键点坐标,构建代表人体主躯干及腿部的向量,获得人体腿部相对于地面垂线的偏移角;人体主躯干与腿部偏移角随视频图像序列帧的数值波动反映人体与地面垂线的倾斜程度变化状况,作为人体倾斜姿态动态特征以检测人体跌倒行为;
55.基于公开跌倒视频库抽选动作帧形成关键图像的数据集,数据集对应的人体倾斜姿态特征可构成包含人体主躯干与腿部偏移角的特征向量,以高斯核密度估计拟合特征向量各属性值在跌倒行为及非跌倒行为的概率密度分布状况;使用线性核svm进行跌倒识别二分类工作;
56.以基于人体下降姿态动态特征的阈值判断作为跌倒识别算法的补充条件;在支持向量机将人体行为分类为跌倒后,若人体质心下降程度超过阈值则将其判定为跌倒行为,否则仍视为非跌倒行为;通过阈值判断,可以将与跌倒行为类似、混淆性较大的日常活动行为从支持向量机二分类结果中排除,以保证算法准确率与召回率;
57.抽取多个跌倒动作与站立、行走、下蹲等多个日常活动动作,形成数据集对跌倒识别方法进行测试;参考图像检测相关评价指标,通过精确率、准确率及召回率评价测试效果;
58.其中,基于人体下降姿态动态特征的阈值判断作为判别人体跌倒的补充条件,以减少误判,降低本文方法识别跌倒的召回率;
59.人体倾斜姿态动态特征没有表现出跌倒倾向,此时对应偏移角数值较小且较为稳定;当人体发生跌倒时,稳定性平衡状态被打破,此时偏移角会出现剧烈波动并伴随较大数值;
60.人体处于行走状态或站立等稳定状态时,主躯干及腿部偏移角数值相对较小,且相邻帧对应偏移角变化较小;人体处于不平衡的跌倒状态时,主躯干及腿部偏移角数值明显增大且伴随较大波动,与稳定状态存在较大差异,以人体主躯干与腿部偏移角数值作为人体倾斜姿态动态特征,对跌倒行为与站立、行走等非跌倒行为进行区分。
61.需要说明的是,上述主机判断用户是否存在摔倒风险属于现有技术的应用,详见中国专利公开(公告)号:cn113509175a所公开的一种跌倒防护装置及防护方法。
62.作为本发明进一步的方案,所述架体1的一端镂空槽中转动设置有行走轴6,移动轮7固定在所述行走轴6的两端;所述动力组件连接所述行走轴6;
63.所述架体1的另一端的镂空槽的内壁两侧对称固定设置有一个卡块,所述卡块上设置有凹槽24,所述转向轮23转动设置在方向轴22的下部,且方向轴22上设置有一段球型的凸起,所述球型凸起与所述凹槽24活动卡合;
64.在此需要特别说明的是,所述凹槽24的截面呈与球型的凸起相适配的球型槽,且凹槽24的上下部均为平直状,球型的凸起上下部也呈平直状;
65.通过球型的凸起与凹槽24配合可使方向轴22沿其轴线转动,从而带动转向轮23改变朝向;另外,由于凹槽24的上下部均为平直状,而球型的凸起上下部也呈平直状,因此球型凸起只可顺着方向轴22的轴线转动,保持方向轴22始终处于铅锤方向;
66.在动力组件工作时带动行走轴6转动,从而驱动两侧的移动轮7转动,最终带动整个装置行走,配合转向轮23可对行进方向改变,达到自动行走并跟随用户的效果。
67.作为本发明更进一步的方案,所述架体1上靠近行走轴6的一端固定有支撑板,所述动力组件包括安装在所述支撑板上的马达2、连接所述马达2输出端的主轴3、用于将主轴3的转矩传递至行走轴6的锥齿轮组;
68.所述锥齿轮组包括固定在所述主轴3端部的第一锥齿轮4和固定在所述行走轴6上并与第一锥齿轮4啮合的第二锥齿轮5;
69.其中,所述马达2的电源输入端与内置于架体1中的电源相连接,且电源通过远程无线开关控制其与马达2的导通。
70.在该实施例中,由于设置了远程无线开关,因此用于可通过该开关来控制马达2的工作状态,相较于直接在装置上设置开关而言,可有效防止在用户欲关闭开关时装置跟随用户,导致用户无法触碰到装置上的开关;
71.在马达2通电工作时首先带动主轴3转动,转动的主轴3利用第一锥齿轮4驱动第二锥齿轮5转动,最终带动行走轴6和移动轮7转动。
72.作为本发明再进一步的方案,所述捕捉跟踪机构包括固定在所述方向轴22远离转向轮23一端的托板21和通过摆动组件安装于所述托板21上的红外捕捉器32;
73.所述摆动组件连接所述动力组件中的主轴3,所述摆动组件在所述主轴3通过锥齿轮组驱动行走轴6转动时,带动所述红外捕捉器32来回摆动捕捉用户身影。
74.其中,由于用户在正常行走时会存在前进、后退、左转、以及右转四种情况;若采用静止的红外捕捉器32则只能在用户前进和后退时捕捉身影,而当用户左转和右转时,会丢失捕捉信息;
75.本发明中采用摆动的方式可克服上述问题,由于摆动的方向为左右摆动,且摆动呈规律性双向快速摆动,故在用户每偏转一定角度均能被左右摆动的红外捕捉器32捕捉到,当红外捕捉器32在向右摆动捕捉到用户的身影时,利用红外捕捉器32向主机发送信号,主机再向转向结构发送信号,以使转向轮23向右偏转转弯;
76.相应地,当红外捕捉器32在向左摆动捕捉到用户的身影时,利用红外捕捉器32向主机发送信号,主机再向转向结构发送信号,以使转向轮23向左偏转转弯,以此达到跟随用户的路径进行自动行走的功能。
77.作为本发明再进一步的方案,所述转向结构包括安装在所述架体1上的电机34,所述电机34的输出端通过第二传动件33连接方向轴22;
78.所述电机34与主机通讯,且电机34为步进电机;所述摆动组件包括转动设置在所述托板21上的托柱31,所述托柱31上固定有承托件30,所述红外捕捉器32固定安装在所述承托件30上,且所述承托件30通过偏心结构与所述主轴3连接。
79.在该实施例中,在主轴3转动时利用偏心结构带动承托件30绕托柱31来回摆动,以使红外捕捉器32来回摆动;
80.需要着重说明的是,本发明中虽然红外捕捉器32沿着左右方向来回摆动,但是当方向轴22发生偏转时,由于托板21也同步偏转,故可以理解成红外捕捉器32始终沿着转向轮23的行进方向左右偏摆,以保持红外捕捉器32的偏摆中心线始终指向用户。
81.作为本发明再进一步的方案,所述偏心结构包括转动设置在所述托板21上的摆轴20、固定在所述摆轴20上的大齿轮25、转动设置在所述托板21上的传动轴、固定在所述传动轴上并与大齿轮25啮合的小齿轮26、以及固定在所述传动轴顶部的偏心轮27;
82.所述偏心轮27的偏心处固定有凸柱28,所述承托件30的下部固定有同所述凸柱28滑动嵌合的槽板29;所述主轴3通过第一传动件19与所述摆轴20连接。
83.在主轴3转动的过程中,通过第一传动件19带动摆轴20转动,转动的摆轴20借助大齿轮25驱动小齿轮26快速转动,从而使偏心轮27转动,偏心轮27利用其偏心处的凸柱28与槽板29滑动嵌合带动承托件30绕托柱31往复左右摆动,最终带动红外捕捉器32来回摆动。
84.作为本发明再进一步的方案,所述膨胀防护机构包括安装在所述架体1上的高压箱16、设置在所述高压箱16上并与高压箱16连通的泵气组件、对称设置在所述高压箱16两侧的膨胀结构;
85.所述泵气组件连接所述主轴3,且所述膨胀结构包括安装在所述高压箱16两侧的电磁阀17,所述电磁阀17的端部设置有防护气囊18,所述电磁阀17与所述主机通讯,且在所述高压箱16的底部设置有溢流阀(图中未示出)。
86.在该实施例中,主轴3转动时通过泵气组件不断向高压箱16中充入气体,在高压箱16中的气体达到一定的压缩比后通过溢流阀排出,以使高压箱16中的气压保持在一个动态恒定的范围内;
87.相较于采用罐体储气而言,一方面能够自动蓄压,另一方面动态充气泄气能够保持高压箱16中的气压稳定,防止高压箱16中的气体泄漏后导致气压不足。
88.在使用时,若主机判断用户存在摔倒风险,则主机向电磁阀17发送开启信号,高压箱16中的压缩空气通过电磁阀17进入到防护气囊18中,防护气囊18充气后膨胀,且两侧的防护气囊18在膨胀后形成一个接近封闭的区域,以将用户圈围在防护气囊18中,起到跌倒缓冲防护作用。
89.作为本发明再进一步的方案,所述泵气组件包括固定设置在所述高压箱16上的注射筒13、密封滑动设置在所述注射筒13内的密封塞11、以及穿过所述注射筒13一端并与注射筒13滑动配合的压缩杆9;
90.所述压缩杆9伸入到所述注射筒13内的一端与所述密封塞11固定,在所述注射筒13的一侧上部设置有进气口,所述进气口处安装有单向阀14,注射筒13远离压缩杆9的一端设置有出气口,出气口通过另一单向阀14和导气管15与所述高压箱16连通;所述主轴3通过弹性复位结构与所述压缩杆9连接。
91.在该实施例中,主轴3转动时利用压缩杆9和弹性复位结构配合带动密封塞11在注射筒13内双向交替活动,在两个单向阀14的作用下将外界空气不断泵入到注射筒13中,再从注射筒13中经导气管15送入到高压箱16内存储并压缩。
92.作为本发明再进一步的方案,所述弹性复位结构包括转动设置在所述压缩杆9伸出所述注射筒13外的一端上的滚轮12,所述滚轮12与固定在所述主轴3上的凸轮8滚动配合;
93.在所述压缩杆9的外部套设有一圈柱形弹簧10,所述柱形弹簧10的一端抵接在压缩杆9靠近滚轮12处的凸板上,另一端抵接在所述注射筒13的端头。
94.在主轴3转动时带动凸轮8转动,转动的凸轮8与滚轮12配合带动压缩杆9在柱形弹簧10的作用下不断伸入到注射筒13中再从注射筒13中伸出,以带动密封塞11不断在注射筒13内密封滑动,配合两个单向阀14将外界空气泵送到高压箱16中。
95.本发明还提供了一种跌倒防护方法,具体包括如下步骤:
96.步骤一,身影获取与分析,通过红外捕捉器采集用户身影图像并发送至主机,利用主机分析身影躯干与地面的偏移角度;具体是利用人体姿态关键点获取人体主躯干相对于地面垂线的偏移角和腿部相对于地面垂线的偏移角,以此表征人体倾斜姿态动态特征;
97.步骤二,跌倒识别,主机基于深度卷积神经网络的人体姿态关键点获取,用预设模型的神经网络,自二维图像中获得多个人体关键点及其在图像坐标系的对应坐标;而后主机取得的人体骨骼在图像坐标系的关键点坐标,构建代表人体主躯干及腿部的向量,获得人体腿部相对于地面垂线的偏移角;人体主躯干与腿部偏移角随视频图像序列帧的数值波动反映人体与地面垂线的倾斜程度变化状况,作为人体倾斜姿态动态特征以检测人体跌倒行为;
98.步骤三,基于公开跌倒视频库抽选动作帧形成关键图像的数据集,数据集对应的人体倾斜姿态特征可构成包含人体主躯干与腿部偏移角的特征向量,以高斯核密度估计拟合特征向量各属性值在跌倒行为及非跌倒行为的概率密度分布状况;使用线性核svm进行跌倒识别二分类工作;
99.步骤四,以基于人体下降姿态动态特征的阈值判断作为跌倒识别算法的补充条件;在支持向量机将人体行为分类为跌倒后,若人体质心下降程度超过阈值则将其判定为跌倒行为,否则仍视为非跌倒行为;通过阈值判断,可以将与跌倒行为类似、混淆性较大的
日常活动行为从支持向量机二分类结果中排除,以保证算法准确率与召回率;
100.步骤五,抽取多个跌倒动作与站立、行走、下蹲等多个日常活动动作,形成数据集对跌倒识别方法进行测试;参考图像检测相关评价指标,通过精确率、准确率及召回率评价测试效果;
101.步骤六,基于人体下降姿态动态特征的阈值判断作为判别人体跌倒的补充条件,以减少误判,降低本文方法识别跌倒的召回率;
102.人体倾斜姿态动态特征没有表现出跌倒倾向,此时对应偏移角数值较小且较为稳定;当人体发生跌倒时,稳定性平衡状态被打破,此时偏移角会出现剧烈波动并伴随较大数值;
103.人体处于行走状态或站立等稳定状态时,主躯干及腿部偏移角数值相对较小,且相邻帧对应偏移角变化较小;人体处于不平衡的跌倒状态时,主躯干及腿部偏移角数值明显增大且伴随较大波动,与稳定状态存在较大差异,以人体主躯干与腿部偏移角数值作为人体倾斜姿态动态特征,对跌倒行为与站立、行走等非跌倒行为进行区分;
104.步骤七,防护动作启动,若主机判断人体倾斜姿态动态特征没有表现出跌倒倾向,则保持膨胀防护机构不动作;当主机判断用户行为存在跌倒风险时打开膨胀防护机构,在用户周边形成防护圈。
105.上述实施例是示范性的,而非限制性的,故在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明的技术方案均囊括在本发明内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1