CT穿刺智能激光引导定位取样装置的制作方法
ct穿刺智能激光引导定位取样装置
技术领域
1.本发明涉及穿刺取样用装置技术领域,特别是涉及ct穿刺智能激光引导定位取样装置。
背景技术:
2.在目前市面上的ct机只有12点钟和3点钟9点钟方向上的三个激光定位灯,用于日常ct扫描的定位。而在ct引导下穿刺这三个灯所能提供的帮助有限。目前穿刺医生想找到穿刺点都是在穿刺层面上用直尺在患者体表进行测量。穿刺角度更是全靠医生的手法和经验,手动确定。这样无疑会增加进针次数或者提高风险。而智能激光引导定位系统可以在医生想要的层面自行设计路径和角度,智能激光定位取样装置会在患者体表出点红色激光穿刺点,并给出合理角度,能有效的避开心脏大血管等部位,并能进行精准穿刺。
3.如授权公告号为cn110180093a的发明所公开的一种基于x线图像引导的远程智能校准激光定位系统,其虽然能让系统判断穿刺点与穿刺角度,但是并未与ct穿刺互相结合,无法由系统判定穿刺地点与角度的同时由系统进行穿刺取样,为此我们提出ct穿刺智能激光引导定位取样装置。
技术实现要素:
4.为了克服现有技术的不足,本发明提供ct穿刺智能激光引导定位取样装置,在需要进行穿刺取样时,让装置主体与机械臂互相结合,智能判断穿刺点与角度的同时,机械臂进行穿刺取样,而医者只需核对结果,收取样品即可,能进一步减少医者的操作负担,更加智能与安全。
5.为解决上述技术问题,本发明提供如下技术方案:ct穿刺智能激光引导定位取样装置,包括装置主体、穿刺机构与控制机构,穿刺机构包括
6.机械臂,所述机械臂位于装置主体顶端表面;
7.尖端转块,所述尖端转块位于机械臂一端端面;
8.滑轨,所述滑轨开设于尖端转块外侧;
9.滑动块,所述滑动块滑动连接于滑轨内侧;
10.穿刺针,所述穿刺针一端活动连接于滑动块内侧,所述穿刺针另一端位于滑动块外侧;
11.控制机构包括
12.智能激光引导系统模块、执行操控模块、细节调整模块、数据记录模块与数据显示模块,所述智能激光引导系统模块、执行操控模块、细节调整模块、数据记录模块与数据显示模块均位于装置主体内部。
13.作为本发明的一种优选技术方案,所述智能激光引导系统模块的输出端电连接于执行操控模块、细节调整模块、数据记录模块与数据显示模块的输入端,所述数据记录模块的输出端电连接于数据显示模块的输入端,所述执行操控模块与机械臂为电连接,所述细
节调整模块与滑动块为电连接。
14.作为本发明的一种优选技术方案,所述装置主体一侧表面设置有控制面板,所述控制面板包括触摸液晶显示屏与操作按钮,所述触摸液晶显示屏、操作按钮与数据记录模块、数据显示模块为电连接。
15.作为本发明的一种优选技术方案,所述装置主体底端表面固定连接有支柱,所述支柱围绕装置主体底端表面呈四角分布,且四个所述支柱底端表面均设置有防滑垫。
16.作为本发明的一种优选技术方案,所述机械臂底端表面固定连接有连接底盘,所述连接底盘位于装置主体顶端表面,且所述连接底盘与装置主体的连接处设置有螺栓。
17.作为本发明的一种优选技术方案,还包括连接机构,所述连接机构包括连接槽,所述连接槽开设于滑动块一侧表面,所述穿刺针一端活动连接于连接槽内侧,所述连接槽内侧固定连接有限位块,所述穿刺针外侧开设有限位槽,所述限位块活动连接于限位槽内侧,且所述限位块围绕连接槽内侧设置有四个,所述限位槽与限位块数量相同,且四个所述限位块外侧均设置有防滑纹。
18.作为本发明的一种优选技术方案,所述穿刺针外侧活动连接有上半环与下半环,所述上半环与下半环均位于滑动块外侧,所述上半环靠近下半环的一侧表面开设有插入槽,所述插入槽内侧设置有磁块,所述下半环靠近上半环的一侧表面设置有插入块,所述插入块一端活动连接于插入槽内侧与磁块为磁吸连接。
19.作为本发明的一种优选技术方案,所述下半环与上半环内侧均设置有软性橡胶层,所述软性橡胶层活动连接于穿刺针外侧。
20.与现有技术相比,本发明能达到的有益效果是:
21.1、通过设置的穿刺机构与控制机构,在需要进行穿刺取样时,让装置主体与机械臂互相结合,智能判断穿刺点与角度的同时,机械臂进行穿刺取样,而医者只需核对结果,收取样品即可,能进一步减少医者的操作负担,更加智能与安全;
22.2、通过设置的连接机构,在本装置进行过一次取样后,可将穿刺针取下进行替换或消毒,从而保证了装置的卫生度,同时本机构操作简单,不造成多余的操作负担。
附图说明
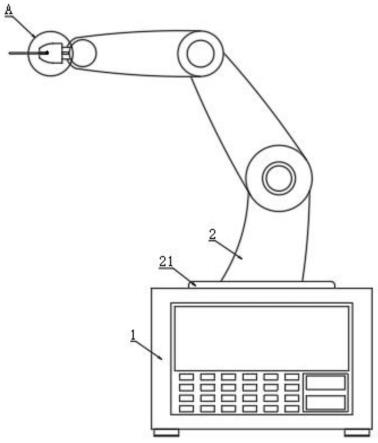
23.图1为本发明的结构示意图;
24.图2为本发明的装置主体正面结构示意图;
25.图3为本发明的系统构成结构示意图;
26.图4为本发明的图1中a处的放大结构示意图;
27.图5为本发明的图4中b处的放大结构示意图;
28.图6为本发明的图4中c处的放大结构示意图;
29.其中:1、装置主体;2、机械臂;3、控制面板;4、穿刺针;5、上半环;10、支柱;11、智能激光引导系统模块;12、执行操控模块;13、细节调整模块;14、数据记录模块;15、数据显示模块;21、连接底盘;22、尖端转块;23、滑轨;24、滑动块;25、连接槽;26、限位块;31、触摸液晶显示屏;32、操作按钮;41、限位槽;50、下半环;51、插入槽;52、磁块;53、插入块。
具体实施方式
30.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例,进一步阐述本发明,但下述实施例仅仅为本发明的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其它实施例,都属于本发明的保护范围。下述实施例中的实验方法,如无特殊说明,均为常规方法,下述实施例中所用的材料、试剂等,如无特殊说明,均可从商业途径得到。
31.实施例1:
32.如图1-图4所示,ct穿刺智能激光引导定位取样装置,包括装置主体1、穿刺机构与控制机构,穿刺机构包括机械臂2,机械臂2位于装置主体1顶端表面;尖端转块22,尖端转块22位于机械臂2一端端面;滑轨23,滑轨23开设于尖端转块22外侧;滑动块24,滑动块24滑动连接于滑轨23内侧;穿刺针4,穿刺针4一端活动连接于滑动块24内侧,穿刺针4另一端位于滑动块24外侧;控制机构包括智能激光引导系统模块11、执行操控模块12、细节调整模块13、数据记录模块14与数据显示模块15,智能激光引导系统模块11、执行操控模块12、细节调整模块13、数据记录模块14与数据显示模块15均位于装置主体1内部;智能激光引导系统模块11的输出端电连接于执行操控模块12、细节调整模块13、数据记录模块14与数据显示模块15的输入端,数据记录模块14的输出端电连接于数据显示模块15的输入端,执行操控模块12与机械臂2为电连接,细节调整模块13与滑动块24为电连接;
33.首先通过ct图像进行定位,对确定的待扫描区域执行螺旋扫描,获得扫描数据;根据扫描数据获取ct断层图像;在预设定位角度下,采用虚拟的x平行射线束对获取的断层图像进行平行束正投影,以获得投影数据;根据投影数据获得预设定位角度下的ct定位图像,智能激光引导系统模块11对穿刺点以及穿刺角度进行判断,并将指令发送给执行操控模块12与细节调整模块13,执行操控模块12操控机械臂2进行高度、角度的调整,细节调整模块13则操控滑动块24,让穿刺针4的插入长度得到一定的调整,机械臂2带着穿刺针4刺入人体进行取样,此次取样的各项数据则被智能激光引导系统模块11取得后发送给数据记录模块14与数据显示模块15,医者通过数据记录模块14与数据显示模块15来操控具体穿刺取样的结果;在需要进行穿刺取样时,让装置主体1与机械臂2互相结合,智能判断穿刺点与角度的同时,机械臂2进行穿刺取样,而医者只需核对结果,收取样品即可,能进一步减少医者的操作负担,更加智能与安全。
34.在其他实施例中,本实施例公开了,请如图2所示,装置主体1一侧表面设置有控制面板3,控制面板3包括触摸液晶显示屏31与操作按钮32,触摸液晶显示屏31、操作按钮32与数据记录模块14、数据显示模块15为电连接;通过该设计,让本装置性能更优秀,使用者可以更加便捷的得知所有操作数据,并对其进行保存或删除。
35.在其他实施例中,本实施例公开了,请如图2所示,装置主体1底端表面固定连接有支柱10,支柱10围绕装置主体1底端表面呈四角分布,且四个支柱10底端表面均设置有防滑垫;通过该设计,可以有效增强装置主体1与其他平台之间的连接紧密度,避免打滑,增强稳定性。
36.在其他实施例中,本实施例公开了,请如图1所示,机械臂2底端表面固定连接有连接底盘21,连接底盘21位于装置主体1顶端表面,且连接底盘21与装置主体1的连接处设置有螺栓;通过该设计,让机械臂2与装置主体1之间的连接为可拆卸,可以根据机械臂2的使
用情况来对机械臂2进行维护或维修,从而保证装置的使用寿命。
37.实施例2:
38.在其他实施例中,本实施例公开了,请如图1、图4、图5、图6所示,还包括连接机构,连接机构包括连接槽25,连接槽25开设于滑动块24一侧表面,穿刺针4一端活动连接于连接槽25内侧,连接槽25内侧固定连接有限位块26,穿刺针4外侧开设有限位槽41,限位块26活动连接于限位槽41内侧,且限位块26围绕连接槽25内侧设置有四个,限位槽41与限位块26数量相同,且四个限位块26外侧均设置有防滑纹。
39.将穿刺针4插入到连接槽25中用力推,让限位块26进入到限位槽41,即可将穿刺针4与滑动块24连接,反之则用力往外拽穿刺针4,让限位块26退出限位槽41即可;在本装置进行过一次取样后,可将穿刺针4取下进行替换或消毒,从而保证了装置的卫生度,同时本机构操作简单,不造成多余的操作负担。
40.在其他实施例中,本实施例公开了,请如图4、图6所示,穿刺针4外侧活动连接有上半环5与下半环50,上半环5与下半环50均位于滑动块24外侧,上半环5靠近下半环50的一侧表面开设有插入槽51,插入槽51内侧设置有磁块52,下半环50靠近上半环5的一侧表面设置有插入块53,插入块53一端活动连接于插入槽51内侧与磁块52为磁吸连接;通过该设计,可以进一步限定穿刺针4的位置,同时让使用者拉扯穿刺针4时,可以着力于上半环5与下半环50,更加便利。
41.在其他实施例中,本实施例公开了,请如图6所示,下半环50与上半环5内侧均设置有软性橡胶层,软性橡胶层活动连接于穿刺针4外侧;通过该设计,让上半环5、下半环50与穿刺针4之间的连接更加紧密,不易打滑的同时不会给穿刺针4造成负担。
42.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下还可以作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1