具有位置检测、调整功能的人工心脏无线充电方法
1.本发明涉及无线电能传输应用技术领域的一种具有位置检测、调整功能的人工心脏无线充电方法及传输马甲,尤其是涉及一种电磁共振式无线电能传输装置,具体为一种具有体内线圈位置检测、主动跟随功能的人工心脏无线充电方法及充电马甲、系统。
背景技术:
2.对于处于心脏衰竭晚期的病人,除了使用传统的药物辅助治疗,这是一种比较保守的治疗方案,该方法做不到彻底解决病人心脏衰竭的问题,而随着近年来生物工程科学、生命科学技术的迅速发展,提出了人工心脏作为除药物保守治疗外的另一种有效治疗心脏衰竭的治疗方案,人工心脏通过替代原生命机体已趋于衰竭的生物心脏实现对生命的延续的目的。此项技术很好的解决了心脏移植技术中最大的制约因素即心脏供体严重不足的问题,近年来也出现了部分商品化的人工心脏产品,通过临床试验移植人工心脏证明可以使人体的病症得以缓解,故移植人工心脏已成为如今治疗心力衰竭人体的一种有效的外科治疗手段。
3.人工心脏可以局部取代甚至是完全取代原有生物心脏,起到和原有的生物心脏相同的作用,然后这项技术也衍生出一些问题,例如人工心脏的电能传输已然是一个不可忽视的限制因素,目前已有的电能供给方式主要有两种,一种是人工心脏内嵌不可充电的高能电池,一种是经皮传能系统。第一种是通过外科手术来更换已耗完电量的高能电池,该方法会增加人体经历手术次数承担不小的手术风险且费用昂贵。第二种是经皮传能系统,虽然同样通过外接电源给人工心脏供能,但是有两种方式,一种是通过经皮导线穿刺皮肤以达到给人工心脏充电的目的,另一种是通过磁耦合wpt(wireless power transfer)技术给人工心脏传输电能,而导线穿刺皮肤的方法会给人体带来潜在的感染风险,故wpt技术是一种较为安全的途径来为人工心脏实现无线充电,同时避免了外科手术的风险。
4.现有的无线电能传输方式可分为以下几类:电磁感应式、电磁共振式、微波辐射式、激光式、无线电波式。电磁共振式属于近场传输,有着电磁感应式所不具备的较大的传输距离的优势,该方式通过具有相同频率的回路的谐振产生相互耦合的电磁场形成能量传输的通道,且能量传输效率不易受非磁性的障碍物的影响具有较为稳定的传输效率,传输效率通常与频率和线圈的几何构造相关。微波辐射式的传输方式存在效率低下、易造成信号干扰、发射的微波过于分散无法集中等问题,在空间太阳能电站等领域应用较多;激光式传输方式利用光电效应从而实现激光-电能的转换,在太空光电转换领域应用前景较多;无线电波式传输方式利用无线电波能量转换成电能,传输距离远但是能够被接收的效能较低。因此,电磁感应式和电磁共振式在日常的电子设备、水下器械、医疗器械等场合有着广泛的应用。
5.近年来,对于将无线充电技术引入医疗领域的关注度不断提高,针对现有的装置很少考虑到使用者的人工心脏会随着使用者的日常活动哪怕是像呼吸这样微小的动作都会影响传输距离、线圈的互感值的变化,从而导致无线电能传输效率低下,通常为实现内部
线圈的位置检测需要在内部加装传感器,而加装内置传感器会增加植入设备的体积及经济成本,若能通过技术手段或装置从体外就能检测体内的内部线圈位置情况则能显著减小植入设备的整体尺寸,既符合植入式设备轻便小巧的设计要求又达到检测线圈位置的功能要求。
技术实现要素:
6.为了提高植入人体的人工心脏随着使用者的日常活动引起线圈接收端和发射端位置发生微小位置偏移及角度偏转变化时的无线电能传输效率,本发明在于提供了一种具有体内线圈位置检测、主动跟随功能的人工心脏无线充电方法及充电马甲。本发明的系统和方法具有体内线圈位置检测,具有体内线圈位置主动跟随功能。
7.本发明为实现上述目的所采用的技术方案是:
8.步骤1):体外的电源模块经电源转换模块为体外的能量发射线圈提供高频交流电能,能量发射线圈经发射谐振匹配模块驱动将电能以电磁波的形式向体内人工心脏附近的能量接收线圈发射,能量接收线圈通过接收谐振匹配模块接收电磁能并转化为交流电能,通过整流稳压电路为体内人工心脏供电;
9.其特征在于:方法还包括:
10.步骤2):能量接收线圈在交流电作用下产生电磁波,通过在体外额外布置位置传感线圈对能量接收线圈产生的磁场进而检测能量接收线圈的位置和偏角;
11.步骤3):能量发射线圈固定在位置调整模块上,将位置传感线圈检测获得的能量接收线圈的位置和偏角反馈到位置调整模块中,调整能量发射线圈的位置和偏角,使得能量发射线圈和能量接收线圈之间保持最优的位置和偏角关系,进而使得能量发射线圈和能量接收线圈之间的传输效率保持最优。
12.所述步骤2)中,对各个位置传感线圈两端的电压进行测量,并通过解耦获得体内的能量接收线圈在位置传感线圈上的感应电压,进而求解获得各个位置传感线圈与体内的能量接收线圈之间的互感关系,根据互感关系与位置传感线圈和能量接收线圈间的位置函数关系通过逆向求解计算出体内的能量接收线圈相对于位置传感线圈的相对位置和相对转动角度。
13.以位置传感线圈的中心点为原点建立固定坐标系,通过计算或实验在体外得到各位置传感线圈关于能量接收线圈在不同相对位置和相对转动角度下的互感值,并将不同相对位置和相对转动角度所对应的互感值放入表格并储存于嵌入式计算模块;
14.实时检测位置传感线圈和体内的能量接收线圈之间的互感值,将互感值通过查表法处理获得出实时的体内的位置传感线圈和体内的能量接收线圈之间的相对位置和相对转动角度,再根据体外已知的位置传感线圈的位置和角度,获得体内的能量接收线圈的位置和角度。
15.将多个位置传感线圈分别布置在体外马甲相对于体内的能量接收线圈的两侧及后方,各位置传感线圈与能量发射线圈的位置保持恒定,位置传感线圈不接负载,通过对位置传感线圈上的电压直接进行检测获得体内的能量接收线圈与位置传感线圈之间的互感关系,且通过不同相对位置和相对转动角度的位置传感线圈布置,全方位地检测到体内的能量接收线圈产生的电磁波,通过检测不同的相对位置和相对转动角度下的位置传感线圈
的电压,获得传感线圈和体内的能量接收线圈在该相对位置和相对转动角度下的互感值,该互感值包含了位置信息和偏转角度信息,实现对体内的能量接收线圈位置和偏角的更精确检测。
16.所述步骤3)中,当体内的能量接收线圈与体外的能量发射线圈之间的相对位置发生变化时,通过检测位置传感线圈上电压得到与能量接收线圈之间的互感值并将该互感值计算出能量接收线圈产生的偏移,控制位置驱动模块控制位置调整模块调整能量发射线圈的位置和角度,实现能量发射线圈跟随体内的能量接收线圈位置和转角变化而变化。
17.所述方法采用人工心脏无线充电系统,所述的人工心脏无线充电系统包括发射侧回路和接收侧回路;
18.发射侧回路包括电源模块、电源转换模块、发射谐振匹配模块、能量发射线圈、位置调整模块、位置驱动模块、嵌入式计算模块和位置传感线圈;电源模块依次经电源转换模块、发射谐振匹配模块后和能量发射线圈电连接,能量发射线圈在人体外的马甲前方布置并正对于布置在体内人工心脏旁的接收侧回路的能量接收线圈,位置传感线圈布马甲的后方及两侧,位置传感线圈和嵌入式计算模块电连接,嵌入式计算模块依次经位置驱动模块、位置调整模块后和能量发射线圈电连接;
19.接收侧回路包括能量接收线圈、接收谐振匹配模块和整流稳压电路,能量接收线圈在人工心脏旁的人体内并依次经接收谐振匹配模块、整流稳压电路后和人工心脏电连接。
20.马甲穿戴在人体上,马甲前方的胸口处安装有发射侧回路的能量发射线圈,马甲后方和侧方均安装由多个位置传感线圈组成的位置传感线圈阵列(3、4)。
21.所述的位置调整模块内包括微动机构,微动机构包括驱动模块、固定板、连杆和升降柱,驱动模块具有四个旋转输出端,驱动模块的四个旋转输出端竣工经各自的连杆和各自对应的一个升降柱底部连接,四个升降柱顶部连接到固定板底面的四角,固定板上放置能量发射线圈。
22.所述的驱动模块为带有四根输出轴的电机,四根输出轴位于电机的四角。
23.本发明具有的有益效果:
24.本发明在于基于体外位置传感线圈的体内线圈位置检测装置,通过对体外位置传感线圈上的开路电压检测的感应电压信号进行采集、分离,从而得到体内的能量接收线圈产生的感应电压信号,并建立位置传感线圈和能量接收线圈在不同位置和偏角的互感值归一化处理后的数据表格,通过逆向计算快速得到表格中最接近检测获得的互感值的坐标作为实际的体内线圈位置和偏角坐标,最终实现不在体内额外植入任何附加传感装置的情况下通过体外位置传感线圈对体内的能量接收线圈位置和偏角进行检测,并有效减小了植入式设备的整体尺寸。
25.本发明还在于体内线圈位置具有主动跟随功能的人工心脏无线充电方法,当体内的能量接收线圈与体外能量发射线圈相对位置发生变化时,嵌入式计算模块计算出能量接收线圈产生的水平偏移及角度偏转,并将能量发射线圈需要调整的位移和角度信息传输给位置驱动模块控制位置调整模块调整能量发射线圈的位置和偏角,位置调整模块为微电机驱动十字滑台对能量发射线圈在x轴和y轴两个方向进行平移,并通过四根连杆对沿z轴的高度和偏角进行调整,保证体外能量发射线圈和体内的能量接收线圈之间的相对位置保持
恒定,最终实现体外线圈主动跟随能量接收线圈的位置变化而调整,进一步提高无线电能稳定传输的效率,有效减少由于能量接收线圈位置变动而引起的无线电能传输效率低下的问题。
26.本发明还有在于该无线电能传输马甲的可穿戴性,人体可直接穿戴无线电能传输马甲,既有效避免了传统采用经皮导线而存在的老化等问题,又提高人体的体验舒适感避免外科手术的感染风险,降低医疗成本。
27.由此,本发明在体内不额外增加任何植入装置的情况下让能量发射线圈和能量接收线圈之间的耦合状态保持恒定,提高系统的性能,有利于植入式人工心脏摆脱透皮电缆的束缚。
附图说明
28.参考附图为本发明进行进一步的描述。
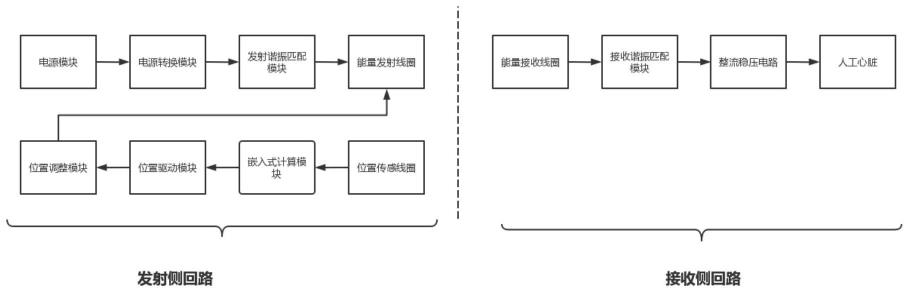
29.图1为本发明的整体系统结构框图;
30.图2是马甲前面的布置示意结构图;
31.附图标记说明:1、微动机构;2、马甲前方能量发射线圈;3、马甲侧方的位置传感线圈阵列;4、马甲后方位置传感线圈阵列;
32.图3是马甲侧面的位置传感线圈阵列示意图;
33.图4是马甲背面的位置传感线圈阵列示意图;
34.图5是位置传感线圈和能量接收线圈之间的空间分布互感模型示意图;
35.附图标记说明:以o点(即马甲前方位置调整装置的中心)为原点建立空间坐标系xoyz;x
′
、y
′
、z
′
为线圈在xoy平面上水平位移后的空间坐标系;x
″
,y
″
,z
″
为线圈角度偏转后的空间坐标系;r1为能量发射线圈半径;r2为能量接收线圈半径;θ为接收平面的法向量与z轴夹角;为接收平面法向量在xoy平面上与x轴夹角;
36.图6是微小型多自由度微动机构的调整示意图。
37.附图标记说明:5、驱动模块,含微电机及差速齿轮等机械机构设计;6、固定板;7、连杆;8、升降柱。
具体实施方式
38.附图仅为本发明的的示范性图解,并非一定按比例绘制。下面通过结合附图对本发明做进一步的说明。
39.方法采用人工心脏无线充电系统,如图1所示,人工心脏无线充电系统包括发射侧回路和接收侧回路。
40.发射侧回路包括电源模块、电源转换模块、发射谐振匹配模块、能量发射线圈、位置调整模块、位置驱动模块、嵌入式计算模块和位置传感线圈;电源模块依次经电源转换模块、发射谐振匹配模块后和能量发射线圈电连接,能量发射线圈在人体外的马甲前方布置并正对于布置在体内人工心脏旁的接收侧回路的能量接收线圈,位置传感线圈布马甲的后方及两侧,位置传感线圈和嵌入式计算模块电连接,嵌入式计算模块依次经位置驱动模块、位置调整模块后和能量发射线圈电连接;
41.接收侧回路包括能量接收线圈、接收谐振匹配模块和整流稳压电路,能量接收线
圈在人工心脏旁的人体内并依次经接收谐振匹配模块、整流稳压电路后和人工心脏电连接。接收侧回路内置于人体心脏处。
42.如图2-图4所示,马甲穿戴在人体上,马甲前方的胸口处安装有发射侧回路的能量发射线圈2,马甲后方和侧方均安装由多个位置传感线圈组成的位置传感线圈阵列3、4,各模块在马甲上能快速固定安装并保持相对位置恒定,模块之间通过马甲内部走线相连,使用时仅需穿上马甲就能实现对人工心脏的正常供电并实现对体内线圈位置检测及跟随功能。
43.如图6所示,位置调整模块内包括微动机构1,微动机构1包括驱动模块5、固定板6、连杆7和升降柱8,驱动模块5具有四个旋转输出端,驱动模块5的四个旋转输出端竣工经各自的连杆7和各自对应的一个升降柱8底部连接,四个升降柱8顶部连接到固定板6底面的四角,固定板6上放置能量发射线圈。
44.如图2所示,位置调整模块由微电机驱动,位置调整模块含有的微动机构采用十字滑台与连杆机构的组合形式来实现对线圈的位移及角度调整,十字滑台是指微动机构的实施形式是以十字滑台和连杆机构的组合,即对能量发射线圈在x轴和y轴两个正交方向进行平移,后通过四根连杆对z轴和偏角进行调整,先后实现对于能量发射线圈的位置和角度的调整。
45.位置调整模块包含微动机构十字滑台与连杆机构的组合,其微动机构固定于能量发射线圈下方,为了减轻装置整体重量,优选非金属类材料的工程塑料如abs树脂,可通过微小型电机驱动该微动机构。
46.驱动模块5为带有四根输出轴的电机,四根输出轴位于电机的四角,四根输出轴为abcd四根,驱动模块5含电机及差速齿轮等机械机构设计。
47.本发明具体实施如下:
48.步骤1:体外的电源模块经电源转换模块为体外的能量发射线圈提供高频交流电能,能量发射线圈经发射谐振匹配模块驱动将电能以电磁波的形式向体内人工心脏附近的能量接收线圈发射,能量接收线圈通过接收谐振匹配模块接收电磁能并转化为交流电能,通过整流稳压电路为体内人工心脏供电;
49.步骤2:体内的能量接收线圈在交流电作用下产生电磁波,通过在体外额外布置一定数量的位置传感线圈对体内的能量接收线圈产生的磁场进而检测体内的能量接收线圈的位置和偏角的测量;
50.步骤2中,对各个位置传感线圈两端的电压进行测量,并通过解耦获得体内的能量接收线圈在位置传感线圈上的感应电压,进而求解获得各个位置传感线圈与体内的能量接收线圈之间的互感关系即通过测量传感线圈与接收线圈在不同位置下所一一对应的感应电压得到一系列的互感值,预先已知位置传感线圈与体内的能量接收线圈的坐标位置之间的位置函数关系,根据互感关系与位置传感线圈和能量接收线圈间的位置函数关系通过逆向求解即利用测量并计算得到的互感值反向求解获得位置函数的信息计算出体内的能量接收线圈相对于位置传感线圈的相对位置和相对转动角度。
51.在离线状态下,以位置传感线圈的中心点为原点建立固定坐标系,通过计算或实验在体外得到各位置传感线圈关于能量接收线圈在不同相对位置和相对转动角度下的互感值,并将不同相对位置和相对转动角度所对应的互感值放入表格并储存于嵌入式计算模
块;
52.实时检测位置传感线圈和体内的能量接收线圈之间的互感值,将互感值通过查表法处理快速获得出实时的体内的位置传感线圈和体内的能量接收线圈之间的相对位置和相对转动角度,再根据体外已知的位置传感线圈的位置和角度,获得体内的能量接收线圈的位置和角度,具体实施中每隔一定时间获取根据互感关系。
53.将多个位置传感线圈分别布置在体外马甲相对于体内的能量接收线圈的两侧及后方,各位置传感线圈与能量发射线圈的位置保持恒定,位置传感线圈不接负载,通过对位置传感线圈上的电压直接进行检测获得体内的能量接收线圈与位置传感线圈之间的互感关系,且通过不同相对位置和相对转动角度的位置传感线圈布置,全方位地检测到体内的能量接收线圈产生的电磁波,通过检测不同的相对位置和相对转动角度下的位置传感线圈的电压,获得传感线圈和体内的能量接收线圈在该相对位置和相对转动角度下的互感值,该互感值包含了位置信息和偏转角度信息,实现对体内的能量接收线圈位置和偏角的更精确检测。
54.步骤3:能量发射线圈固定在位置调整模块上,将位置传感线圈检测获得的能量接收线圈的位置和偏角反馈到位置调整模块中,调整能量发射线圈的位置和偏角,使得能量发射线圈和能量接收线圈之间保持最优的位置和偏角关系,进而使得能量发射线圈和能量接收线圈之间的传输效率保持最优。
55.步骤3中,当体内的能量接收线圈与体外的能量发射线圈之间的相对位置发生变化时,通过检测位置传感线圈上电压得到与能量接收线圈之间的互感值并将该互感值输入嵌入式计算模块计算出能量接收线圈产生的偏移,控制位置驱动模块控制位置调整模块调整能量发射线圈的位置和角度,实现能量发射线圈跟随体内的能量接收线圈位置和转角变化而变化,确保系统耦合状态和关系始终恒定,保持在原始最优的设置,即确保了系统耦合状态始终恒定,保障人工心脏无线充电系统高效稳定的传输性能。
56.通过充电马甲上的位置传感线圈检测获取体内的能量接收线圈的位置和转角信息,充电马甲上的嵌入式计算模块控制位置调整模块实现对能量发射线圈位置和转角的调整,实现对体内线圈位置跟随功能。
57.基于多线圈位置检测原理简述如下:
58.利用位置传感线圈对体内的能量发射线圈进行空间位置及角度偏转检测,通过对位置传感线圈上的感应电压信号进行信号采集、分离,获得所需的体内的能量接收线圈的感应电压信号,基于磁感应效应理论模型,建立体内能量发射线圈和体外位置传感线圈之间的互感耦合模型,在固定的线圈结构和给定不变的频率情况下,互感与线圈间的磁场和电场大小并无关系仅与线圈间的相对位置有关,因此互感是关于空间位置坐标的函数。
59.本发明在马甲的后方、左方、右方布置了一定数量的位置传感线圈,通过检测位置传感线圈上的感应电压信号,解耦出各个位置传感线圈上由于体内的能量接收线圈而产生的感应电压信号,进而计算得出各个位置传感线圈与体内的能量接收线圈的之间的互感值。
60.为了预先处理得到在一定的位移范围
±
30mm及一定的偏转角度范围
±
10
°
下,每隔距离0.1mm及偏转角度0.1
°
测量出位置传感线圈和体内的能量接收线圈之间的一系列的互感值,在得到各位置传感线圈关于体内的能量接收线圈不同位置和偏角的互感值后,并
将不同坐标和转角所对应的互感数据放入表格,储存于体外的嵌入式计算模块并将大量的理论计算数据值集中整理归纳成数据库表格形式,以快速获得体内线圈的空间位置信息。
61.当在实验测量中采集得到两线圈间的一系列的互感值,为方便数据处理和简化计算可对这些互感值进行归一化处理。归一化处理:假设有w个位置传感线圈,则位置传感线圈阵列上可得到一系列的互感值m1,m2,...,mw的数据阵列[m1,m2,...,mw],其中m1为第1个位置传感线圈与能量接收线圈之间的互感值,m2为第2个位置传感线圈与能量接收线圈之间的互感值,以此类推,mw为第w个位置传感线圈与能量接收线圈之间的互感值。
[0062]
将这一系列的互感值除以互感值数据阵列中最大值即max(m),可表达为:
[0063][0064]
再将实验测量的一系列互感值与理论计算的一系列互感值进行检索对比,把方差δ即一系列的实验测量数据与理论计算数据的误差的累积,可表示数值的离散程度最小的位置点作为实际的线圈位置点,由此装置能够实现在距离0.1mm和角度偏转0.1
°
的精度范围内准确得到体内的能量接收线圈的位置坐标信息。
[0065]
线圈位置调整原理过程如下:
[0066]
线圈调整的最终目标是使能量发射线圈的空间位置及角度偏转随着体内的能量接收线圈的空间位置及角度偏转变化而变化,使能量发射线圈和能量接收线圈始终保持相对位置不变以实现两线圈之间的互感值恒定,即实现能量发射线圈对能量接收线圈的位置跟随功能,在接受并反馈传递体内的能量接收线圈位置信息后配合微小型多自由度微动机构,先是在十字滑台上实现能量发射线圈在以位置调整装置的中心点o点为原点建立的空间坐标系中xoy平面上沿x轴和y轴方向的水平位移,然后通过微电机驱动齿轮结构调节升降柱的高度实现能量发射线圈在建立的空间坐标系中垂直于xoy平面的z轴上的高度调节及各方向上的偏移角度的调整偏移角度包含了两个角度信息,即接收平面的法向量与z轴的夹角θ和接收平面法向量在xoy平面上与x轴的夹角最终调整到理论上最佳位置点。
[0067]
如图2所示,本发明的传输马甲的前方、后方、左方、右方均布置线圈,具体为前方布置一个能量发射线圈,后方、左方、右方均布置三个位置传感线圈阵列,所述位置传感线圈阵列由三个传感线圈呈三角形紧密排列,为方便表示位置传感线圈阵列,将马甲左方位置传感线圈阵列中的线圈命名w
1i
(i=1,2,3),马甲右方位置传感线圈阵列中的线圈命名w
2i
(i=1,2,3),马甲后方位置传感线圈阵列中的线圈命名w
3i
(i=1,2,3),在经皮能量传输系统的研究中,植入到体内的线圈接收到体外线圈发射的电磁能后会在线圈周围形成电磁场,故利用体外能量发射线圈、位置传感线圈阵列检测体内的能量接收线圈的电磁场信息来实现对体内能量接收线圈的位置检测,通过采集体外的位置传感线圈上的感应电压信号并分离信号得到能量接收线圈在位置传感线圈上所产生的那部分的感应电压后经嵌入式计算模块得到互感值,并根据互感值与线圈位置的关系,逆向求解出两线圈的位置实现检测体内的能量接收线圈的空间位置变化及角度偏转变化,并且结合位置调整模块实时调整能量发射线圈与能量接收线圈之间的相对位置及偏转角度,基于这种方法可以让整个无线电能传输系统始终保持在一个高效率、稳定的传输状态。
[0068]
所述线圈的位置检测方法原理如下:
[0069]
当体外传输马甲的线圈发射侧回路与体内线圈的接收侧回路以相同的频率处于
共振状态形成无线能量的传输通道,当体内线圈位置发生偏移变化时,体外前方的能量发射线圈及位置传感线圈w
1i
,w
2i
,w
3i
上的感应电压会随之发生变化,此时通过采集与线圈连接的电压传感器的信号经过嵌入式计算模块计算处理后得到位置传感线圈和能量接收线圈的互感值,再由互感值与位置函数关系逆向求解出体内的能量接收线圈的空间位置信息。
[0070]
基于磁感应效应理论建立的两个线圈之间的互感耦合模型,线圈之间的互感为一个线圈由另一个线圈每单位电流变化引起的磁链变化,而线圈的几何形状和线圈所处电磁场的大小共同决定了磁链的大小,由毕奥-萨戈尔定律分别计算出两个线圈在所处磁场的磁通密度,结合互感定义可以得出两个线圈的磁场参数即使互换而不会也影响到互感值的大小,而线圈的位置坐标及线圈半径对互感值有直接影响,故线圈间的互感值理论上与磁场及电场的大小并无关系,仅与两线圈间的相对位置及线圈自身几何形状有关。
[0071]
由于位置传感线圈和能量接收线圈间处于不同相对空间位置及能量接收线圈的角度发生偏移时会产生不同的互感值,因而在位置传感线圈上的感应电压信号值也是不同的,而这个互感值与两线圈的相对位置坐标是一一对应的,在位置检测系统中,位置传感线圈两端的电压是开路检测的,即位置传感线圈阵列w
1i
,w
2i
,w
3i
的电阻理论上为无穷大,在位置传感线圈阵列w
1i
,w
2i
,w
3i
上可认为没有电流通过,由于能量接收线圈发射磁场引起的感应电压是求解所需要测量并分离的信号,因为位置传感线圈阵列w
1i
,w
2i
,w
3i
上单个线圈的感应电压=能量发射线圈在位置传感线圈上的电压+能量接收线圈在位置传感线圈上的电压,故需将能量发射线圈在位置传感线圈阵列w
1i
,w
2i
,w
3i
上产生的感应电压滤去。通过对位置传感线圈阵列w
1i
,w
2i
,w
3i
上单个位置传感线圈的电压幅值及在该电压和能量发射线圈电流的相位差进行采集,可获得位置传感线圈和能量接收线圈之间的互感值m
23
,由于马甲上布置的位置传感线圈阵列w
1i
,w
2i
,w
3i
共含有9个位置传感线圈,故可得到一系列实验互感值m
23
=[m1,m2,m3,...,m9],(m1为第1个位置传感线圈与能量接收线圈间的互感值,以此类推,m9为第9个位置传感线圈与能量接收线圈之间的互感值)并对这些互感值进行归一化处理并可用归一化参数e
23
表示,即(式中max(m
23
)为实验测量计算得到的一系列互感值中的最大值),位置传感线圈和能量接收线圈的归一化参数e
23
与线圈之间的位置是一一对应的,通过求解归一化方程就可以计算得到能量接收线圈的位置坐标信息。
[0072]
如图5所示为位置传感线圈和能量接收线圈之间的空间分布互感模型,以o为原点建立xoyz的空间坐标系,在线圈结构给定情况下互感值是关于建立xoyz的空间坐标系,在线圈结构给定情况下互感值是关于的函数(x为能量接收线圈、能量发射线圈在xoy平面上的横坐标,y为能量接收线圈、能量发射线圈在xoy平面上的纵坐标,z为能量接收线圈、能量发射线圈在垂直xoy平面上高度,θ为接收平面的法向量与z轴夹角,为平面法向量在xoy平面上与x轴夹角),偏移角包括了两个角度的信息,基于此互感模型计算得出单个位置传感线圈与能量接收线圈之间的理论互感值由于位置传感线圈阵列w
1i
,w
2i
,w
3i
上共有9个位置传感线圈,故得到一系列的理论互感值(为第1个位置传感线圈与能量接收线圈之间的理论互感值,以此类推,为第9个位置传感线圈与能量接收线圈之间的理论互感值),同理将这
一系列的理论互感值进行归一化处理并用归一化参数表示,得到(式中为基于互感模型下理论计算得到的一系列理论互感值中的最大值)。
[0073]
理论互感值可预先根据不同坐标位置关系获得足够的大量数据信息表格并存储在嵌入式计算模块中,即可预先将位置传感线圈和能量接收线圈以径向距离每隔0.1mm、轴向距离每隔0.1mm、纵向距离每隔0.1mm(位移距离在
±
30mm范围内),能量接收线圈角度偏移每隔0.1
°
(角度在
±
10
°
范围内)时的不同互感值及其对应的位置坐标信息数据制成表格数据库,而实际的互感值可直接对位置传感线圈阵列w
1i
,w
2i
,w
3i
上的一个线圈电压和能量发射线圈的输入电压进行测量,通过matlab对两个所测得的信号进行离散傅里叶分析算出相位差,最终通过上述表达式得出实际互感值,获得归一化理论互感建立,只需通过实验测得实际的互感,那么能量接收线圈的相对位置坐标就能通过逆向求解得到,逆向求解主要目标是寻找一个使理论值和实验值k
23
最接近的坐标点,把方差最小的坐标点与预先处理获得的大量互感信息的表格数据库中互感值所一一对应的坐标进行检索比对,最终得到体内的能量接收线圈的空间位置坐标及角度偏移信息。
[0074]
所述能量发射线圈调整方法如下:
[0075]
线圈调整的最终目标是使能量发射线圈的空间位置及角度偏转随着体内的能量接收线圈的空间位置及角度偏转变化而实时变化,使能量发射线圈和能量接收线圈始终保持在互感值恒定的一个空间平行状态,即假设能量接收线圈的初始位置信息为与之互感值恒定的能量发射线圈初始位置坐标为由于人体日常活动而引起能量接收线圈坐标产生一定变化量后位置坐标为则能量发射线圈的位置坐标理论上应相应的调整为才能保证两线圈之间的互感值恒定从而保证无线电能传输的高效率状态,而通过驱动位移精度可达0.1mm,旋转角度精度可达0.1
°
的微小型多自由度的微动机构使能量发射线圈实现在一定位移范围(
±
30mm)和一定角度偏转范围(
±
10
°
)内的机械位移和角度偏转,先进行平面位移再进行角度偏移调整,能量接收线圈的偏移角包括了两个角度的信息,即用能量接收线圈所在平面的法向量与z轴的夹角θ和在xoy平面上与x轴的夹角这2个角度来表示。
[0076]
具体可简单分为三步:第一步,电机驱动微动机构上的能量发射线圈先通过十字滑轨的机械运动实现在平面上的x、y轴方向的运动,到达理论x、y轴坐标点(x1±
x,y1±
y),第二步,电机驱动微动机构上的差速齿轮,从而齿轮带动与能量发射线圈下方四根升降柱连接的四根连杆,通过连杆的上下摆动实现z轴上的位移到达理论z轴坐标点(x1±
x,y1±
y,z1±
z),第三步,电机驱动微动机构上的差速齿轮实现四根升降柱的一侧升高和另一侧降低,从而实现角度的偏转最终达到理论上坐标处,如图6所示,其升降形式可有如下调整:
[0077]
(1)柱a、b降低,柱c、d升高,实现左方倾斜的角度θ、调整;
[0078]
(2)柱a、b升高,柱c、d降低,实现右方倾斜的角度θ、调整;
[0079]
(3)柱a、d升高,柱b、c降低,实现后方倾斜的角度θ、调整;
[0080]
(4)柱a、d降低,柱b、c升高,实现前方倾斜的角度θ、调整。
[0081]
综上所述,本发明提供的一种具有体内线圈位置检测、主动跟随功能的人工心脏无线充电方法和充电马甲,采用无线充电技术实现人工心脏的电能传输有摆脱免透皮电缆束缚并创新性的利用体外马甲上布置的多传感线圈在不额外增加植入式装置的情况下,实现围绕人工心脏全方位的检测体内线圈的位置及偏角变化,更进一步的,体外发射线圈能够主动跟随体内接收线圈的变化而相应自动做出位置及偏角的调整。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1