用于眼外科手术的装置和方法与流程
用于眼外科手术的装置和方法
1.本技术是申请号为201880043064.6、申请日为2018年5月3日、发明名称为“用于眼外科手术的装置和方法”的发明专利申请的分案申请。
2.相关申请的交叉引用
3.本技术要求2017年5月4日提交的共同未决美国临时专利申请no.62/501710和2017年12月12日提交的共同未决美国临时专利申请no.62/597826的优先权。以引证的方式将临时申请的公开全文并入。
技术领域
4.本技术总体涉及用于眼外科手术的装置和方法,该眼科手术具有从人眼去除晶状体的步骤。更具体地,该技术涉及在眼科手术中破碎、捕获和取出晶状体组织或其他组织。
背景技术:
5.某些类型的传统眼科手术需要将晶状体组织和坚固的眼内物体(诸如眼内晶状体)破碎成块,使得可以将其从眼睛取出。例如,用于白内障手术的晶状体取出是最常见的门诊手术领域之一,仅在美国每年就进行超过300万例。在白内障手术期间,晶状体摘除最常用的方法是超声乳化,该超声乳化包括利用超声能量来使晶状体破裂,然后通过器械抽吸来去除晶状体碎片。晶状体破碎和取出的其他方法可以包括使用诸如挂钩、刀或激光器的器械来将晶状体破碎成碎片,然后以内路(ab interno)法通过角膜中的切口取出。为了允许从通常不超过2.8-3.0mm的眼切口去除白内障,在白内障手术中,晶状体组织的眼内内路破碎极为重要。
6.一些晶状体摘除技术的缺点是晶状体抽吸引起的不想要的并发症,特别是在使用超声乳化的情况下。超声乳化期间的超声能和高容量可能产生湍流,该湍流可能对眼睛内的组织(诸如角膜内皮)产生有害影响。
7.另外,某些抽吸和吸入构造在超声乳化的情况下需要大资本设备,或者可能需要某些资源(诸如壁真空),这些资源不是在所有手术环境中都有的,尤其是在欠发达地区中。传统的抽吸装置可以是独立的管或套管,或者可以与诸如超声乳化单元(“超声乳化系统”)的另一个装置关联。超声乳化系统的流量控制和压力控制通常需要由主控制台进行电子控制。具有从机头延伸到主控制台的吸出管线的机头被使用。机头通常还具有吸入管线,该吸入管线的吸入由简单的重力进给或由主控制台所控制的流量驱动,流体袋/筒安装到控制台。
8.超声乳化装置和使用远程真空源的其他装置的另一个问题是吸出管线较长,这意味着它们在手术期间将经常包含可压缩的材料,诸如气体或可压缩的组织。当吸出被接通和断开时,可压缩材料的长吸出管线会影响尖端处的吸出的响应性。手动可变形/顺应软管和管线加剧了响应性问题,这些软管和管线在开始和停止吸出时也响应压力变化,这进一步延迟尖端处的吸出的发起和终止。一些系统的又一个问题是处理外壳也暴露于真空压力,由此可见,容器和其中的气体或其他可压缩材料也对压力的变化作出响应,并且进一步
造成在尖端处吸出的开始和终止的延迟并造成一些系统的低响应性。
9.用于从眼睛抽吸材料的传统方法和装置的又一个问题是吸出口在手术期间容易堵塞。必须停止吸出,并且如有必要,用另一个器械在眼睛内部独立去除材料。停止手术并疏通远端开口的必要性不期望地增加了手术时间以及器械在眼睛中进行不必要的操作的需要。
10.一些装置的最后一个问题是系统的成本和复杂性。具有相同或更佳性能的低成本另选方案也将是合乎期望的另选方案,诸如不需要昂贵的控制台和电子控制系统的另选方案。
技术实现要素:
11.在方面中,描述了一种用于在眼睛中执行眼科手术的装置,该装置包括手持部和耦合到该手持部的远端细长构件。远端细长构件包括操作地耦合到真空源的管腔。装置包括驱动机构,该驱动机构操作地耦合到细长构件并且被构造为使细长构件振荡。当使用时,装置被构造为通过管腔从眼睛抽吸眼材料,并且驱动机构能够使细长构件以缩回速度曲线沿近端方向缩回,并且使细长构件以伸出速度曲线沿远端方向前进。缩回速度曲线不同于伸出速度曲线。
12.来自缩回速度曲线的细长构件的平均缩回速度可以低于来自伸出速度曲线的细长构件的平均伸出速度。操作地耦合到细长构件的驱动机构可以被构造为使细长构件不对称地振荡。伸出速度曲线可以包括最大伸出速度,并且缩回速度曲线可以包括最大缩回速度。最大缩回速度可以小于最大伸出速度。细长构件的最大缩回速度可以低于阈值速度,在该阈值速度下,眼睛中将生成空化气泡。
13.细长构件的远端尖端可以被构造为相对于手持部从完全缩回构造移动到完全伸出构造,以限定行进距离。行进距离可以在近似0.05mm至1.0mm之间。随着细长构件沿远端方向前进,可以在行进距离的至少一部分期间通过细长构件的管腔汲取抽吸脉冲。随着细长构件沿近端方向缩回,抽吸脉冲可以在行进距离的至少一部分期间通过细长构件的管腔被汲取。装置还可以包括被构造为调节行进距离的致动器。致动器可以被构造为由用户机械地调节。
14.装置还包括响应用户输入的控制处理器。控制处理器可以控制驱动机构的一个或多个方面。该一个或多个方面可以包括行进距离、抽吸脉冲频率或伸出和缩回周期的频率。控制处理器可以是可编程的,并且接受用户输入以调节伸出速度曲线和缩回速度曲线的至少一个方面。控制处理器可以是可编程的,并且接受调节最大伸出速度和最大缩回速度中的至少一个的用户输入。控制处理器可以是可编程的,并且接受设置缩回速度限制的用户输入。控制处理器可以是可编程的,并且可以被配置为由装置上的输入编程。控制处理器可以是可编程的,并且可以被配置为由外部计算装置远程编程。控制处理器可以根据存储在存储器中的程序指令来操作,这些程序指令定义细长构件的伸出速度曲线和细长构件的缩回速度曲线中的至少一个。存储程序指令的存储器可以包括超声乳化系统的一部分。细长构件的伸出速度曲线和细长构件的缩回速度曲线中的至少一个可以通过对硬件的一个或多个变化来调节,该硬件与控制处理器可操作地通信。硬件可以包括超声乳化系统的一部分。
15.驱动机构可以是气动的、电磁的、压电的或机械的。驱动机构可以包括压电元件,该压电元件被配置为根据形成细长构件的非正弦运动模式的电压频率来使细长构件振荡。发送到压电元件的电压频率可以具有大体非正弦的波形。发送到压电元件的电压频率可以包括两个或更多个重叠的正弦波形,这些波形被配置为产生形成大体非正弦波形的干扰。电压频率可以使压电元件的收缩比电压频率允许的压电元件的扩张更慢。
16.驱动机构可以包括操作地耦合到细长构件的凸轮机构。凸轮机构的第一旋转量可以使细长构件沿着缩回速度曲线在近端方向上缩回。凸轮机构的第二旋转量可以使细长构件沿着伸出速度曲线在远端方向上前进。缩回速度曲线可以至少部分地是凸轮机构的转速的函数。驱动机构还可以包括被构造为由凸轮机构压缩的弹簧。凸轮机构的第一旋转量可以压缩弹簧,并且凸轮机构的第二旋转量可以将弹簧从压缩释放。伸出速度曲线可以是弹簧的力和内细长构件的质量的函数。
17.细长构件可以包括壁和穿过壁的端口,该端口具有切割表面。细长构件可以包括切割尖端。切割尖端可以倒角。切割尖端可以包括具有第一尺寸的从管腔开始的远端开口,第一尺寸小于细长构件的管腔的第二内横截面尺寸。切割尖端的远端开口可以具有第一区域,该第一区域小于细长构件的管腔的第二内横截面区域。
18.装置还可以包括外管,该外管包括外管管腔。细长构件可以定位在外管管腔内。眼材料可以通过外管管腔来抽吸。眼材料可以通过外管管腔和细长构件的管腔这两者来抽吸。
19.装置还可以包括具有最外管管腔的最外管。外管可以定位在最外管管腔内。最外管可以包括用于向眼睛递送冲洗流体的一个或多个端口。最外管可以包括弹性材料。
20.细长构件可以能够沿着细长构件的纵向轴线重复地前进和缩回。细长构件可以能够相对于细长构件的纵向轴线沿着椭圆形路径重复地前进和缩回。细长构件可以能够相对于细长构件的纵向轴线沿着非线性路径重复地前进和缩回。非线性路径可以是曲线的。非线性路径可以是椭圆形的。细长构件可以扭转地振荡。伸出速度曲线可以包括通过被扭转振荡产生的第一角转速曲线。缩回速度曲线可以包括第二不同的角转速曲线。
21.真空源可以向细长构件的管腔的远端部递送脉冲真空。真空源可以位于手持部的壳体内。真空源可以位于手持部的壳体上。驱动机构可以在真空源递送脉冲真空的同时使细长构件重复地前进和缩回。在细长构件完成一个前进和一个缩回的单个周期之后,真空源可以将至少一个真空脉冲递送到管腔的远端部。随着细长构件经过一个前进和一个缩回的单个周期,真空源可以将多个真空脉冲递送到管腔的远端部。在每个真空脉冲之后,装置可以产生正压回流的脉冲。随着细长构件经过一个前进和一个缩回的振荡周期,真空源可以将至少一个真空脉冲递送到管腔的远端部。随着细长构件在振荡周期期间缩回,真空源可以将至少一个真空脉冲递送到管腔的远端部。随着细长构件在振荡周期期间前进,真空源可以将至少一个真空脉冲递送到管腔的远端部。
22.眼材料可以包括破碎晶状体材料或乳化晶状体材料中的至少一个。眼材料可以包括玻璃体材料。驱动机构可以被构造为使细长构件以超声波的振荡频率振荡。驱动机构可以被构造为使细长构件以大于大约20000hz的振荡频率来振荡。驱动机构可以被构造为使细长构件以在大约0.5hz至大约5000hz之间的振荡频率来振荡。用户可以通过到控制处理器的输入来选择振荡频率,该控制处理器与驱动机构操作地通信。
23.在相关方面中,描述了一种用于在眼睛中执行眼科手术的方法。该方法包括以下步骤:将装置的远端部插入到眼睛的前房中并且用装置的远端部进入眼睛的晶状体。装置还包括具有真空源的手持部,该真空源被构造为产生不连续负压的脉冲并产生不连续正压的脉冲。不连续负压的脉冲被不连续正压的脉冲点缀并且具有频率。装置包括远端细长构件,该远端细长构件耦合到手持部并形成远端部的一部分。细长构件具有内管腔和在细长轴的远端末端区域处的开口。方法还包括以下步骤:启动装置,以通过细长构件的内管腔产生不连续负压脉冲,以按频率通过开口将第一数量的材料抽吸到内管腔中,并且产生点缀有不连续负压脉冲的不连续正压脉冲,以按频率通过开口从内管腔排出第二数量的材料。第二数量大致小于第一数量。
24.在相关方面中,描述了一种用于在眼睛中执行眼科手术的装置,该装置包括手持部和耦合到该手持部的远端细长构件。远端细长构件包括管腔和在细长构件的远端末端区域处的开口。装置包括与细长构件的远端末端区域处的开口流体连通的真空源。真空源被构造为将不连续负压脉冲递送到管腔的远端末端区域。
25.真空源可以包括定位在手持部内部的泵。泵可以包括至少一个泵室,该泵室具有入口和出口,该入口与细长构件的管腔流体连通。泵可以包括:活塞,该活塞定位在至少一个泵室内;和驱动机构,该驱动机构被构造为使至少一个泵室内的活塞振荡,以产生不连续负压脉冲。负压可以从10inhg一直到大约30inhg。不连续负压脉冲可以具有大约1hz至大约100hz之间的循环频率。第一负压脉冲可以通过入口将第一数量的流体从细长构件的管腔汲取到定位在手持部内的至少一个泵室中。至少一个泵室内的第一正压脉冲可以通过出口将第一数量的流体从至少一个泵室排出。第一数量流体的体积可以在大约0.1ml一直到大约1.0ml之间。活塞在至少一个泵室内沿第一方向的移动可以产生第一负压脉冲。活塞沿第二相反方向的移动可以产生第一正压脉冲。顺应阀可以定位在入口内。活塞沿第二相反方向的第二距离的移动可以密封入口,并且通过顺应阀将一数量的第一正压脉冲传输到细长构件的管腔。传输的数量可以使得第二数量的流体从细长构件的远端末端区域处的开口排出。出口可以由阀调节。该阀可以是球型止回阀。出口可以与抽空室流体连通。
26.装置还可以包括驱动机构,该驱动机构操作地耦合到细长构件并且被构造为使细长构件振荡。在使用中,驱动机构可以使细长构件以缩回速度曲线沿近端方向缩回,并且使细长构件以伸出速度曲线沿远端方向前进。缩回速度曲线可以不同于伸出速度曲线。来自缩回速度曲线的细长构件的平均缩回速度可以低于来自伸出速度曲线的细长构件的平均伸出速度。操作地耦合到细长构件的驱动机构可以被构造为使细长构件不对称地振荡。伸出速度曲线可以包括最大伸出速度,并且缩回速度曲线可以包括最大缩回速度。最大缩回速度可以小于最大伸出速度。细长构件的最大缩回速度可以低于阈值速度,在该阈值速度下,眼睛中将生成空化气泡。细长构件的远端尖端可以被构造为相对于手持部从完全缩回构造移动到完全伸出构造,以限定行进距离。
27.在一些变型例中,以下内容中的一个或更多个可以可选地以任意可行的组合包括在上述方法、设备、装置以及系统中。附图和以下描述中阐述了方法、设备、装置以及系统的更多细节。其他特征和优点将从描述和附图清楚。
附图说明
28.现在将参照以下附图详细地描述这些和其他方面。一般而言,附图并不是绝对地或相当地为等比例,而是旨在为例示性的。而且,可以为了例示清楚的目的而修改特征和元件的相对放置。
29.图1示出了用于吸出材料的装置。
30.图2示出了用于吸出材料的另一个装置。
31.图3a示出了用于吸出材料的又一个装置。
32.图3b示出了使用波纹管的另选吸力源。
33.图4示出了使用文丘里管的又一个吸出装置。
34.图5示出了具有气囊作为吸力源的又一个吸出装置。
35.图6a示出了限流器,该限流器覆盖轴中的开口并且在虚线位置中处于储存位置。
36.图6b示出了相对于轴可纵向移动的限流器,虚线位置示出工作位置。
37.图6c示出了具有y形臂的另选轴。
38.图7示出了限流器的端视图。
39.图8a示出了处于轴的管腔内的塌陷位置的组织操纵器。
40.图8b示出了扩张的组织操纵器,细丝在环之间延伸。
41.图8c示出了去除了细丝的环的另一个视图。
42.图9示出了具有一体形成的中间元件的另一种组织操纵器。
43.图10示出了具有一体形成的中间元件的另一种组织操纵器。
44.图11示出了在环内具有网状材料的又一种组织操纵器。
45.图12示出了具有环的又一种组织操纵器,该环具有一体形成的凹元件。
46.图13示出了具有旋转切割器的又一种组织操纵器。
47.图14示出了具有网状材料的另一种组织操纵器。
48.图15示出了又一种组织操纵器。
49.图16示出了具有两个相对的篮的组织操纵器。
50.图17示出了处于嵌套位置中的相对的篮。
51.图18a示出了用于切割眼睛内的材料的装置。
52.图18b示出了图18a的装置的侧视图。
53.图18c示出了图18a的装置,细长元件变形,以扩张由装置形成的环。
54.图18d示出了进一步扩张的图18c的装置。
55.图19示出了图18a至图18d的装置,该装置完全扩张并定位在囊袋内,并且在环扩张时在囊袋与晶状体之间前进。
56.图20a示出了处于塌陷位置中的另一种切割装置。
57.图20b示出了部分扩张的图20a的装置,远端相对于轴的近端改变方位。
58.图20c示出了通过装置向远端前进而形成的环。
59.图21a示出了进一步扩张的环。
60.图21b示出了扩张的环,细长元件的近端也相对于轴改变方位。
61.图22a示出了另一种装置,该装置利用阀沿闭合路径上的抽吸路径从眼睛抽吸材料。
62.图22b示出了阀处于打开位置中的图22a的装置。
63.图23a示出了具有处于静止或关闭位置中的脚踏板的致动器。
64.图23b示出了处于完全打开位置中的致动器。
65.图24a至图24b示出了具有可调节挡块的另选实施方式的两个视图,该挡块用于限定阀的最大远端位移。
66.图25a至图25b示出了另一另选实施方式的两个视图,该实施方式具有凸轮形式的可调节挡块。
67.图26示出了定位在耦合到主管腔的逆行通道中的逆行流动元件。
68.图27a至图27b示出了用于从眼睛切割和抽吸材料的装置的实施方案的剖视图。
69.图27c至图27d示出了图27a至图27b的装置的切割工具的视图。
70.图27e至图27h示出了图27a至图27b的装置的桶形凸轮的各种立体图。
71.图28a至图28b示出了用于从眼睛切割和抽吸材料的装置的实施方案的侧视图。
72.图28c至图28d分别示出了沿着线c-c和d-d截取的图28a至图28b的装置的剖视图。
73.图28e至图28g示出了图28a至图28b的装置的旋转凸轮的各种视图。
74.图28h至图28n是图28a至图28b的装置的各种部件的附加视图。
75.图29a和图29b分别是用于从眼睛切割和抽吸材料的装置的相关实施方案的立体图和剖视图。
76.图29c是耦合到振荡驱动机构的实施方案的细长构件的立体图。
77.图29d至图29f是处于各种旋转阶段的图29c的振荡机构的侧视图。
78.图29g和图29h分别是具有处于伸出和缩回状态的内管和外管的细长构件的部分视图。
79.图30a示出了常规超声乳化系统的细长构件的对称正弦运动曲线。
80.图30b示出了细长构件的不对称非正弦运动曲线。
81.图30c示出了细长构件的对称运动曲线,其中,细长构件的伸出速度曲线与缩回速度曲线相同。
82.图30d示出了细长构件的不对称运动曲线,其中,细长构件的伸出速度曲线与缩回速度曲线不同。
83.图30e至图30f示出了细长构件的伸出速度曲线和缩回速度曲线的额外示例,其中,这些曲线不同。
84.图30g示出了细长构件(底部面板)的远端尖端相对于其伸出速度曲线(顶部面板)的非正弦移动。
85.图31a示出了真空曲线的实施方案。
86.图31b至图31c示出了细长构件的不对称非正弦运动曲线(实线)与用于通过细长构件抽吸的真空曲线(阴影线)之间的重叠。
87.图32a示出了具有细长构件的装置的立体图。
88.图32b是沿着圆b-b截取的图32a的详细视图。
89.图33a至图33c例示了具有细长构件的装置的各种致动阶段。
90.图34a至图34c例示了在各种致动阶段中的图33a至图33c的装置的部分视图。
91.图35a至图35c例示了在各种致动阶段中的图33a至图33c的装置的部分视图。
92.应理解,附图仅是示例且不意指等比例。应理解,本文描述的装置可以包括不是必须在各附图中描绘的特征。
具体实施方式
93.本文描述了用于在眼内手术期间眼内破碎和去除晶状体和其他组织的方法和装置。本文描述的装置允许从前房去除组织而不损伤其他眼结构。这里描述的装置和方法能够用较少的资本密集型设备进行吸入或抽吸。
94.在各种实施方式中,描述了一种眼外科手术装置,该装置使用切割细绳、细丝、勒除器、篮、袋、环以及其他装置,它们被设计为啮合并破碎晶状体组织,并以微创内路法辅助将其从眼睛去除。在其他实施方式中,描述了用于从眼睛吸入和抽吸流体的装置和方法。与使用带有长的手动可变形/顺应吸出管线进行远程吸出的装置相比,本文描述的抽吸装置具有改进的响应性。在一个方面中,提供了一种手持装置,该装置也可以由用户(手动)提供动力并且不需要电子控制。装置还可以具有短的吸出路径,该路径具有小的吸出体积。装置可以包括手持吸力源,从而消除对从机头到控制台的软管的需要。这大大减小了管线的长度,也减少了受到吸出压力的材料的数量,这些材料可以压缩或扩张,以降低响应性。在一些实施方案中,这里描述的装置可以是全部在同一手持装置内提供切割、破碎、注入和/或抽吸功能的“多合一”装置。
95.这里描述的装置可以包括清理机构,该清理机构将材料从吸出路径清理并将其清理到处理外壳中。清理机构可以是吸出装置的一部分,或者可以是单独的机构。在特定方面中,清理机构是柱塞,该柱塞沿与吸出方向相反的方向将材料推入到处理外壳中。可以是单向阀的阀允许材料进入处理外壳。当在使用期间沿着吸出路径吸出材料时,该阀(或单向阀)还可以防止材料进入处理外壳。与具有到远程吸出系统的长流体管线的系统相比,在手术期间对吸出路径进行清理减小了吸出路径中的材料的体积。对吸出管线的清理可以发生在吸出时间之间,并且可以使用也产生吸出压力的可移动元件来完成。在特定方面中,可移动元件可以是手动设置的弹簧加载柱塞。
96.在又一方面中,吸出装置可以包括在吸出路径内的可移动元件。例如,吸出装置可以是手动致动的弹簧加载柱塞。这里考虑其他吸出装置,包括具有气囊和/或气球的气动系统、可变形的壁和辊系统、或用于产生吸出压力的任意其他合适的系统,诸如文丘里管。吸出装置的可移动元件也可以用于清理吸出路径,但是两个功能可以分开并且以不同的方式执行。
97.在又一方面中,阀可以耦合到手持单元并且沿着吸出路径定位。阀耦合到金属线,并且弹簧作用在阀上,以偏置关闭的阀。金属线耦合到可以包括脚踏板的致动器,以控制金属线和阀的移动。脚踏板还操作地耦合到吸力源,使得由用户进行的脚踏板的移动来控制真空源。当致动器最初被致动(通过按压脚踏板)时,致动器在第一位移阶段期间将阀移动到部分打开位置。在第一阶段期间,致动器将真空或吸力源控制为随着致动器位移增加而逐渐增加真空压力。在第一阶段期间,抽吸压力可以增加到可以为至少570mmhg的目标压力或最大压力。换句话说,致动器将阀控制为不超过半开,直到在第一位移阶段期间达到目标压力为止。致动器可以具有在第一阶段之后的第二位移阶段。第二阶段可以通过以下方式进行:阀随着致动器的位移增加而从部分打开位置逐渐打开,以增加横截面流动面积。另选
地,在第二阶段期间,致动器以任意合适的方式(诸如使阀在第一位置与第二位置之间移动(如下面讨论的))将阀控制为以至少1hz的速率周期地增大和减小施加在开口处的吸出压力(和流量)。第二阶段可以在吸出压力恒定的情况下进行,并且也可以处于最大值。
98.致动器还可以具有在第二位移阶段之后的第三位移阶段。在操作的第三阶段中,阀以变化的占空比在初始(或第一)位置与第二位置之间移动,以调制时间平均流量,同时吸力源压力可以保持恒定和/或最大化。第一位置具有比第二位置小的横截面流动面积。随着用户需要更大的流量,将阀保持在第二位置中或保持为更接近第二位置的时间增加。这对应于两个位置之间增加的占空比,第二位置的占空比相对于第一位置增加。至少1hz的脉冲率可能是合适的。换句话说,随着致动器的位移增加,第三阶段期间的占空比的改变使阀增加阀距第二位置比距第一位置更近的时间。另选地,可以通过以下方式实现相同的效果:通过增加第一位置与第二位置之间的距离,使得在每个周期期间露出更多的孔径,来保持脉冲率占空比恒定,但增加第三阶段期间的致动器的位移。因此,通常实现更高的体积流量。致动器的位移的增加使得在第三阶段期间的阀的第二位置限定增大的横截面流动面积。换句话说,在第三阶段期间的致动器的位移的增加增加了第一位置与第二位置之间的距离,使得更多的孔径被漏出,因此,通常实现更高的吸出体积流量。
99.这里描述的装置和方法可以通过提供将材料限制在远端开口附近的限制器来减少堵塞的可能性。限制器通过限制可能进入远端开口的材料来减少堵塞的可能性。限制器还可以是可移动的(纵向和/或旋转地),以从开口中和周围清除材料,也可以收集材料。应当理解,装置还可以包括具有远端尖端的细长构件,远端尖端的内径相比远端尖端的近端区域的内径减小。与管腔的尺寸相比,可以通过缩小远端尖端处的开口尺寸来减轻堵塞。
100.这里描述了组织操纵器和操纵组织的方法。组织操纵器具有轴,该轴具有带远端开口的管腔。第一环具有第一腿和第二腿,第一腿和第二腿中的至少一个延伸穿过管腔。当第一腿和第二腿中的至少一个前进穿过管腔并从管腔的远端开口伸出时,第一环可从塌陷位置移动到扩张位置。第二环具有第一腿和第二腿,第一腿和第二腿中的至少一个延伸穿过管腔。当第一腿和第二腿中的至少一个前进穿过管腔并从管腔的远端开口伸出时,第二环可从塌陷位置移动到扩张位置。轴可以被定尺为将轴的远端引入到眼睛中。
101.第一环可以具有界定面积的无偏形状,该形状以使该面积最大化的方位来限定。面积的有效直径等于具有相同面积的圆的直径。当从塌陷位置移动到扩张位置时,第一环朝向无偏形状移动。第一环的面积的有效直径在扩张位置中为4.5mm至6.5mm,或者可以为5.0mm至6.0mm。第二环的无偏形状的有效直径可以在第一和/或第二环的扩张位置的有效直径的20%以内。以这种方式,第一和/或第二环提供软部署并且在使用期间是灵活的。超弹性材料的使用进一步增强了第一和第二环的柔韧性。为此,虽然可以使用具有任意合适的横截面形状的任意尺寸,但第一和第二环可以由具有大约0.003”至大约0.006”的直径的超弹性金属线形成。
102.组织操纵器还可以包括定位在第一环与第二环之间的中间元件。中间元件可以是定位在第一环与第二环之间的第三环。中间元件可以包括在第一环与第二环之间延伸的互连元件。互连元件可以与第一环和第二环一体地形成。另选地,互连元件可以是在第一环与第二环之间延伸的挠性细丝。第三环可以具有第一环和第二环的特征。
103.第一环和第二环在它们之间提供受控量的露出表面,以控制并且可选地切割受控
量的材料。在第一环与第二环之间的露出表面具有15mm3至60mm3的面积。换句话说,在第一环与第二环之间的露出表面在扩张位置(或无偏位置,因为它们可能相同)是有效直径的3到10倍。当沿相对于第一和第二环的定向轴的径向向内方向观察时,第一环与第二环之间的露出表面可以具有2-8、2-6、2-4甚至仅2个独立的单元。当在第一与第二环之间扩张并且相对于环径向向内观察时,露出的表面具有的面积比中间元件的表面积至少大4倍。这样,与一些网式装置相比,中间元件不占用过多量的空间。
104.装置可以包括当第一环扩张时从轴的远端延伸的第一支撑元件。第一支撑元件可以是延伸到自由端的细长元件。当沿着最大化第一环的面积的方位观察第一环时,第一支撑元件被定位成自由端被定位在第一环的面积内。还可以提供以相同方式与第二环配合的第二支撑元件。第一环和/或第二环可以具有至少一个互连元件,该互连元件从到第一环的第一连接向到第一环的第二连接延伸,或者可以根据期望的用途而基本上没有任何这种互连元件。
105.在又一方面中,组织操纵器可以具有耦合到第一环以形成篮的凹元件。凹元件可以具有与第一环一体形成的一端,另一端可独立于第一腿和第二腿在管腔内移动。另选地,两端可以与环一体地形成。可以提供具有另一个凹元件的第二环,以形成另一个篮,两个篮可在嵌套位置与两个篮彼此相对的位置之间相对于彼此移动。
106.在使用中,装置以远端和轴的远端开口处于眼睛内部的方式被引入到眼睛中。第一环扩张,并且第二环也扩张(同时或独立)。将材料定位在第一和/或第二环内,然后使第一和/或第二环围绕材料塌陷,以容纳、操纵或切割材料。此外,吸力源可以耦合到管腔,以将材料、流体以及切割的材料吸出到管腔或另一个管腔中。方法可以包括为了所有目的而在此明确并入的装置的所有特征。
107.提供了具有轴的另一种装置,该轴具有细长元件,该细长元件在展开时通过用负荷偏置细长元件而向外弯曲。当第一轴部(耦合到细长元件的第一端)和第二轴部(耦合到细长元件的第二端)相对于彼此从第一位置移动到第二位置时,环可从塌陷位置移动到扩张位置。将材料定位在环中,然后通过塌陷环来切割。环可以被扩张为使得环在囊袋与容纳在囊袋内的整个晶状体之间前进。
108.细长元件可以具有第一挠性部和第二挠性部,它们之间具有中间部,该中间部的弯曲刚性比挠性部大至少1.5。在另一方面中,当展开时,第一端可以相对于轴的近端改变方位。方位改变可以通过以下方式来提供:简单地将第一端钉住或以其他方式可旋转地耦合到轴,使得当第一轴部和第二轴部从第一位置移动到第二位置时,角度(方位)变化至少120度或180度+/-45度。轴的远端还可以包括挠性部,当环扩张时,该挠性部相对于轴的近端部改变方位。远端的方位可以改变至少30度。随着环从塌陷位置移动到扩张位置,第一端旋转,使得环向远端前进超过轴的远端。第二端也可以可旋转地耦合到轴或可以包括挠性部。第一挠性部或第一端的所有方面的使用和讨论同样适用于第二端,并且在这里具体地并入。此外,还明确地并入了第一端和第二端的混合,诸如挠性的第一端和可旋转的第二端。
109.为了在连接到机头时产生提供吸力的真空,可以按下柱塞装置。在白内障手术期间,期望的是具有递送到眼睛的平衡盐溶液(bss)的供应以及去除流体和其他材料的吸力的供应。某些眼科手术尖端具有通过双腔设计吸入和抽吸流体的能力。这些装置连接到吸
力和加压bss流体的供应。这里描述了包括通过简单的机构提供吸力或bss加压流体的能力的装置,其中一些可以手动提供动力或调节。机头还可以连接到加压bss源(诸如挂袋)或任意数量的其他加压源(诸如弹簧加载注射器等)。另选地,真空可以由任意数量的其他机构来供应,诸如波纹管机构、隔膜泵、文丘里泵、捕集泵、容积泵、再生泵、动量传递泵、被释放的真空的密封容器、微型泵等。当连接到机头时,吸力被提供到尖端,以提供抽吸。在一个实施方式中,可以使用诸如火鸡滴油管的可压缩膜管来提供吸力。用户可以用手指按下膜管,并且通过从膜管释放手指来控制吸力的量。其他杠杆机构可以另外在手持器械中产生真空。在一些实施方式中,护士或助手可以凭借连接到手持器械的装置产生真空。例如,脚踏板可以用于产生连接到外科医生的装置的吸力。机头可以包含任意数量的废物容器,这些容器包含收回的流体并将其存储在机头中或将其离开机头存储。各种真空机构可以以任意数量的方式提供动力,诸如用户或助手的手动操作。在该实施方式中,用户可以诸如通过以下方式来用能量对装置“充电”:在开始手术之前按下弹簧加载柱塞,然后凭借阀或其他输入机构控制真空量。在一些实施方式中,bss加压供应可以耦合到机头,并且可以在与真空同时或单独地“充电”。例如,外科医生可以按下在真空和bss流体上产生弹簧力的一个柱塞,使得外科医生可以在手术期间用单个按钮或多个按钮来控制两者的释放。在其他实施方式中,bss可以在挂袋或其他加压系统中,并且用管道输送到机头中。
110.在一些实施方式中,机头可以包括流量控制阀,该流量控制阀用于另外地允许外科医生选择被抽吸或吸入的流体的速率或压力。外科医生可以通过旋转旋钮或任意数量的其他流量控制机构来调节期望的流量,旋钮将管压缩一定量或将球阀打开一定量。装置还可以包括可以被按下以调节装置何时吸入或抽吸的按钮。外科医生按下按钮的量本身可以控制可变流量。可以有用于控制吸入和抽吸的单个按钮,或者吸入和抽吸可以各有单独的按钮。在这里描述按钮的情况下,应当理解,按钮可以是多向按钮,以启动多于单个功能。类似地,装置可以并入多于单个按钮来访问装置的各种功能(即,抽吸、吸入、切割等)。应当理解,按钮简单地意指用户的控制接口,并且可以预期任意数量的接口。另外,控制接口可以在手持装置本身上,或者可以在另一个位置中。例如,可以使用脚踏板来控制流量,或者可以使用用另一只手紧握的单独装置。
111.在一些实施方式中,装置可以包括用于吸入和抽吸的双管腔设计。在其他实施方式中,可以有两个以上的管腔,或者这些管腔可以同心地定向。
112.在各种其他实施方式中,描述了用于去除或破碎晶状体组织的装置和方法。可以并入附接到勒除器或环的袋或网状物来抓住被全部或部分破碎的晶状体组织。袋和网状物可以用于通过穿刺术从眼睛拉动组织。在一些实施方式中,可以在捕获晶状体的碎片之后将单独的工具插入袋或网状物中,并且该单独的工具可以用于将组织破碎成更小的碎片。例如,旋转切割器器械可以与不同装置一起插入或者通过袋装置的管腔插入,以在器械处于袋或容器内的同时将组织切割成更小的块,使得可以通过穿刺术收回。
113.在其他实施方式中,使用各种篮来捕获晶状体材料并且将其从眼睛拉动或将材料进一步破碎成可以被抽吸的更小块。在每个实施方式中,袋、网状物以及篮可以由任意数量的材料制成。例如,可以使用镍钛诺材料并将其成形为适当的方位。某些材料(诸如镍钛诺)可以在多种形状之间弹性改变,并且用于通过小轮廓进入眼睛并在眼睛内扩张以捕获晶状体材料。预期任意数量的形状,诸如装硬币的钱包、膨胀的气球,弯曲的袋等。装置可以包括
任意多种材料,诸如不锈钢、镍钛诺、生物相容性塑料等。另外,镍钛诺可以以其超弹性态或形状记忆态或以两种形式用于多个部件中。
114.在一些实施方式中,切割器和螺旋钻等可以用于将晶状体机械地破碎成多块。这些装置可以另外包括用于抽吸晶状体材料的集成吸出。
115.上述方面适用于这里描述的所有合适的实施方式。由此,如上所述的镍钛诺的使用适用于涉及这里描述的任意切割细丝、元件或装置的所有合适的方面。类似地,上述抽吸装置的任意方面同样适用于这里描述的所有抽吸实施方式。最后,使用每个装置和方法的特征、方面以及方法同样适用于这里描述的其他装置和方法(包括切割),并且这里明确并入所有这种特征。
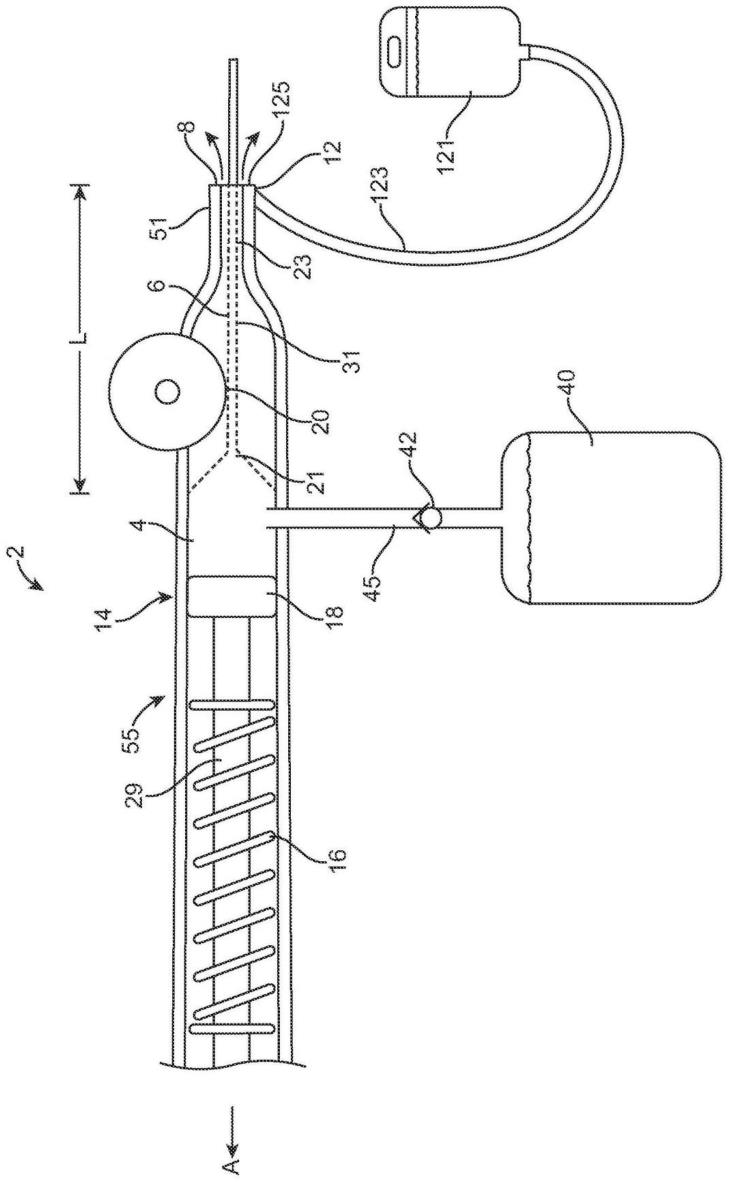
116.现在参照附图,图1示出了用于在眼睛上的手术期间去除材料的装置2。装置2具有吸出路径4,该吸出路径在管腔6的远端12处或附近穿过管腔6从管腔6延伸到开口8。开口8可以定位在眼睛中,用于从眼睛去除材料,诸如囊袋内的晶状体碎片。吸力源14可以耦合到吸出路径4,以将材料汲取到开口8中。吸力源14可以是手动加载的弹簧16,该弹簧耦合到具有滑动密封18的柱塞29。这里考虑了其他合适的吸力源。吸力源14可以位于远端末端区域附近的装置2的手持部内,这提供短吸出路径4以及这种短路径和吸出路径4内的小吸出体积的益处。
117.吸出路径4可以具有近端吸出体积21和远端吸出体积23。近端吸出体积21可以始终大致在吸力源14的吸出压力的影响下,使得系统在某种意义上准备或“准备好”在手术期间随时吸出材料。吸出路径4的近端吸出体积21可以小于25ml,并且在装置2的致动器20的近端已经在吸出压力下。近端吸出体积21可以由致动器20与吸力源14(在这种情况下为滑动密封18)之间的吸出路径4的体积限定。因为致动器20被定位为较靠近开口8,所以吸出路径4的远端吸出体积23也较小。在一些实施方案中,远端吸出体积23可以小于2ml。致动器20可以可移动到若干不同的位置,并且可以连续可变,以允许用户期望的吸出量。术语致动器20在这里用于指代作用在吸出路径4上的元件。致动器20可以包括一个或多个输入,诸如滑块、开关、按钮或被构造为手动或以其他方式启动的其他类型的物理元件。输入可以直接位于装置的手持部件上,并且与致动器20直接接口连接,或者输入可以远离致动器20。在一些实施方案中,按钮可以直接作用在致动器20上,并且还可以本身具有弹性。输入,无论是滑块、开关、按钮还是其他类型的致动器,都可以是多向输入,以访问装置的多于单个功能,或者装置可以并入多个输入,每个输入具有致动特定功能(即,抽吸、注入、切割等)的能力。
118.吸力源14可以包括可移动元件,该可移动元件可以在箭头a所示的方向上移动,以将材料汲取到开口8中并穿过吸出路径4。如下面更详细地说明的,可移动元件在与方向a相反的方向上位移,以将材料移动到吸出路径4中并进入到处理外壳40中。吸力源14的构造可以变化。在一些实施方案中,吸力源14可以是手持的,因为可移动元件是手持单元的一部分。装置也可以不具有电子控制器和电动零件,甚至可以由用户来提供动力,因为弹簧16是手动加载(延伸)的。可移动元件可以包括具有滑动密封18的柱塞29。弹簧16可以耦合到柱塞29,以向可移动元件手动地加载弹簧负荷。可移动元件的构造可以变化,包括活塞、塞子、止动器、球或诸如气囊或气球的壁的可移动部。一旦加载,则可移动元件的柱塞29和滑动密封18连续施加吸出压力,直到弹簧16完全松弛或以其他方式约束为止。
119.致动器20可以充当用于吸出路径4的阀,并且可以作用在吸出路径4的可变形部31
上。开口8可以暴露于吸出压力,因为在启动致动器20时,吸出压力可以通过将开口8暴露于吸出压力来施加。另选地,当启动吸出装置本身时,开口8可以暴露于吸出压力。例如,甚至装置2的弹簧加载机构也可以耦合到控制器(未示出),使得施加和释放吸出压力,并且在施加吸出压力时,使开口8暴露于吸出压力,以将材料汲取到开口8中。致动器20可以通过简单地或多或少地按下以使可变形部31在至少两个不同的打开位置之间或多或少地变形而连续可变。图1示出了通过简单地改变可变形部31变形的量而在完全打开位置与完全关闭位置之间的连续可变致动器20。
120.处理外壳40耦合到吸出路径4,以从吸出路径4接收材料。诸如单向阀的阀42可以定位在处理外壳40与吸出路径4之间。阀42允许材料在吸出操作期间移动到处理外壳40,并隔离处理外壳40。阀42可以是例如致动阀或被动单向阀,当在阀42的一侧上的流体压力相对于另一侧增加时在必要时自动打开和关闭。阀42隔离处理外壳40,使得材料的可压缩性不影响如这里描述的系统的响应性。吸出路径4可以在眼睛外部的与注射器类似或相同的部分处增大直径。此外,吸出路径4可以采取各种形状中的任意一种。处理外壳40被构造为例如由桌子、传统的吊架或任意其他合适的结构独立地支撑。此外,处理外壳40可以是手持的或位于远处。处理外壳40具有从吸出路径4延伸到处理外壳40的处理管腔45。如上所述,阀42(或单向阀)将处理外壳40与吸出压力隔离,从而防止处理外壳40在使用期间的任意压力响应。
121.装置2可以在很大程度上是手持的,因为吸出路径4是手持的,并且吸力源14也是手持的。吸力源14不需要包括来自吸出机的管道等,而是限定了产生吸出压力的机械源。应当理解,这里考虑了若干吸出机构中的任意一种。例如,可以使用具有管道的辊、气动系统、气囊或文丘里管来产生吸出压力。吸出路径4还可以是一半以上不可手动变形的,甚至是至少90%不可手动变形的。具有远程吸出装置的大多数系统包括可手动变形管和软管,它们可以响应压力变化并可以进一步降低响应性。吸出路径4可以较小,以进一步提高响应性。为此,吸出路径4可以具有小于20cm的长度(纵向)l或小于25ml甚至小于15ml的体积。
122.如上所述,这里描述的装置对于从眼睛去除材料特别有用。由此可见,管腔6可以具有适当的大小。吸出路径4包括具有管腔6的轴51。管腔6被定尺为引入到眼睛中,并且具有纵向轴线,轴51的外周(或直径)的横截面积不大于0.8mm2,而管腔具有至少0.28mm2的横截面积。
123.柱塞29和滑动密封18可以被操作为手动清理吸出路径4。当重新发起吸出时,清理吸出路径4减少吸出路径4中的材料。清理机构55可以是可移动元件(例如,柱塞29和滑动密封18),或者可以是将材料从吸出路径4移动到处理外壳40的单独元件。在一个方面中,清理机构55使材料沿与如箭头a所示沿着吸出路径4吸出材料相反的方向移动穿过吸出路径4。当可移动元件前进时,阀42允许从吸出路径4流向处理外壳40。清理机构55还可以包括与可移动元件分离的元件,该元件形成吸出装置14的一部分,并且可以完全独立于吸力源14。如这里定义的,吸出路径4包括被可移动元件占据的体积。例如,滑动密封18在吸出路径4的长度和体积实质变化的完全缩回位置与完全前进位置之间移动。如这里使用的,吸出路径的限定长度和体积应由吸力源14容纳在其中的最小体积来限定。由此,长度和体积由柱塞/可移动元件的最前进位置限定,该最前位置使长度和体积最小化。
124.如这里描述的,诸如气体的“可压缩”材料还可以指材料的“可扩张性”,因为施加
到夹带的气体和材料的吸出压力可以允许气体和材料在更低的吸出压力下略微扩张(而不是压缩)。气体的可压缩性(或可扩张性)以及对压力响应性的影响通常被认为是气体的“可压缩性”问题,并且在这里也这样描述,并且应当理解,该术语也适用于气体和材料的可扩张性。关于软管和管线,抵抗吸出压力的压缩的能力是与这种系统的响应性相关的材料特性,可手动变形的材料通常也机械地响应压力变化。
125.参照图2,示出了用于在手术期间去除材料的相关装置102。在该实施方案中,吸力源114可以包括被手动加载了弹簧105的柱塞103。弹簧105可以加载有附接到壳体109的枢转杆107。处理外壳111可以安装到壳体109和壳体内,使得其可以与装置102一起手持。按压杆107使柱塞103前进,以将吸出路径4中的材料清理到处理外壳111。第一阀113和第二阀115(可以是单向阀)允许通过管腔吸出并将材料清理到处理外壳111中。
126.一旦前进,则杆107可以被选择性地锁定和解锁,或者用户可以继续向杆107施加压力,以本质上地停止吸出。当再次期望吸出时,可以以可变压力释放杆107,以改变所产生的吸出量。另选地,第一阀113可以包括接口120,诸如按钮,其被致动为打开和关闭吸出路径。接口120可以充当这里描述的致动器,并且将吸出路径的近端体积117与远端体积119分开。第一阀113可以形成在沿着阀113的吸出路径的可变形部131上方,以便于如这里描述的使用,并且可变形部和致动器的所有这种使用在此明确地并入。第二阀115(可以是单向阀)调节到处理外壳111的流量。如图1所示,冲洗流体源121也可以耦合到轴51,用于使用冲洗流体源121冲洗眼睛。冲洗流体源121可以是重力进给袋或液体递送系统(诸如超声乳化系统)的一部分。冲洗管腔123具有定位在眼睛中的开口125,用于递送冲洗流体。
127.参照图3a至图3b,示出了另一吸出装置302,其中,相同或类似的附图标记指代相同或相似的结构。吸力源314可以包括可移动元件,该可移动元件包括滑动密封318,该滑动密封318耦合到手动加载有弹簧316的柱塞329。在该实施方案中,吸力源314被示出为远离手持壳体330。手动加载弹簧316。冲洗源121,诸如平衡盐溶液袋,可以耦合到冲洗管腔323。阀325可以控制冲洗流体的流动。致动器320以与上面的致动器20相同的方式使用,并且吸出路径包括可变形部331,并且在此明确地并入这些元件的所有方面和方法。当柱塞329和滑动密封318前进时,吸出路径的清理也以与材料移动到处理外壳340中相同的方式完成。阀342可以以与上述相同的方式设置为控制到处理外壳340中的流动,并且在此也并入这些方面的讨论。
128.参照图3a至图3b,吸力源314还可以包括可移动元件,该可移动元件是可以凭借脚踏板用脚来致动的波纹管350(而不是柱塞)。波纹管350被偏置到打开位置,使得波纹管350在按下脚踏板之后提供吸力。与其他实施方式相似,当波纹管350被用户的脚压缩时,波纹管350中的材料(也构成如这里描述的吸出路径的一部分)被移动到处理外壳340。
129.参照图4,示出了又一吸出装置402,其中,相同或类似的附图标记指代相同或相似的结构。装置402具有耦合到加压气体源408的文丘里管406。文丘里管406将加压气体引向处理外壳440,该处理外壳还将吸出路径404内的材料也引向处理外壳440。文丘里管406还充当吸力源404,该吸力源沿着吸出路径404产生吸出压力。吸出路径404包括与文丘里管406连通的室415,因此由文丘里管406在室415中产生吸出压力。文丘里管406凭借枢转杆321打开和关闭。
130.参照图5,示出了另一吸出装置502,其中,相同或类似的附图标记指代相同或相似
的结构。吸力源514具有可移动元件529,该可移动元件是被构造为由用户手动变形的气囊531。一旦被压缩,则压缩维持在气囊531上以停止吸出,并且减小以产生吸出。换句话说,在用户释放压缩的情况下,气囊531从无偏状态移动到压缩状态,以开始将材料吸到开口508中。气囊531从无偏状态移动到压缩状态还可以使材料从吸出路径504(包括气囊的内部体积)移动到处理外壳540。第一阀513还可以包括接口520,诸如按钮,使得第一阀513充当这里描述的致动器并分离吸出路径504的近端体积(即阀513的近端)与远端体积(即阀513的远端)。如这里描述的,第一阀513可以形成在沿着阀513的吸出路径504的可变形部上方。第二阀543(可以是单向阀)调节到处理外壳540的流量。冲洗源547还可以设置有耦合到致动器(未示出)的弹簧加载递送机构549。
131.这里描述的吸出装置的所有方面和方法适用于其他吸出装置,并且对于来自其他装置中的每一个,明确并入所有这种方法和方面。例如,吸出路径的长度和体积以及管腔和轴的尺寸适用于这里描述的每个其他合适的实施方式。
132.现在参照图6a至图6c以及图7,示出了用于从眼睛吸出材料的吸出尖端600。吸出尖端600,无论是可去除的还是与装置一体的,都可以定位在本文描述的装置的前端上,以将吸出的材料限制到减少堵塞问题的尺寸。吸出尖端600可以包括轴602,该轴602具有延伸穿过轴602的管腔604。轴602中的远端开口608具有由开口轴线oa限定的面积,该面积使开口608的尺寸最大化。开口面积oa可以是圆形、椭圆形或任意其他合适的形状。开口面积oa限定有效直径,该有效直径被定义为对于与具有与开口面积相同的面积的圆等效的直径。轴602中的远端开口608可以小于管腔604的内径,从而减轻轴602内部堵塞的问题。
133.吸出尖端600还可以包括限制器610,当沿着开口轴线oa观察时,限制器610在远端开口608上延伸。限制器610具有从轴602延伸的支撑臂612。限制器610可具有附接到支撑臂612的挡块614,如图7所示,当沿着开口轴线oa观察时,挡块614与远端开口隔开并定位在远端开口上方。限制器610与远端开口608隔开沿着开口轴线测量的有效直径的0.80至1.10倍或者0.85至1.00倍,并且当沿着开口轴向oa观察时与远端开口608对齐。限制器610还可以可选地从轴602的远端延伸一短距离,使得其不妨碍使用。为此,限制器610可具有远端615,该远端615沿着开口轴线测量的从远端开口608延伸不超过有效直径的1.5倍。限制器610在沿着开口轴线oa观察时的面积可以是在沿着开口轴线oa观察时的远端开口608的面积的0.1至1.2倍。由此,当较少考虑移动、收集或清除来自开口608的材料时,限制器610可以稍小。
134.当沿着开口轴线oa观察时,支撑臂612可具有不大于90度的角度范围b,如图7所示。当沿着开口轴线oa观察时,远端开口608可在远端开口608与限制器610上的挡块614之间没有除了支撑臂612的障碍物。当限制器610处于图6b的虚线位置所示的工作位置时,限制器610形成通向远端开口608的进给开口622。进给开口622限定表面626,该表面在限制器610与围绕开口608的轴623的远端之间延伸并由其限定。表面626可以是实质上从支撑臂612的一侧延伸到另一侧的细长表面。这样,表面626的平均长度是有效直径的2.5-3.5倍。表面626的宽度可以是有效直径的0.8至1.1倍。
135.支撑臂612可以相对于轴602纵向和/或旋转地移动,以调节支撑臂612的纵向或旋转位置,如虚线和实线位置所示。支撑臂612可从工作位置(如上所定义)移动到位移位置,工作位置是在将材料吸出到远端开口608中时使用的位置。轴602具有纵向轴线la,并且限
制器610在支撑臂612旋转和/或可纵向位移的情况下形成。限制器610可以形成为使得位移位置将材料移向远端开口608。限制器610也可以向外延伸,以帮助收集或以其他方式组织要吸出的材料。限制器610可移动至沿着开口轴线oa测量距远端开口608至少两个有效直径的位置。
136.限制器610可以例如以同心的方式安装在轴上,但在一些实施方式中,只要限制器610在轴上并且在管腔的外部,这里就考虑互锁或独立的管腔。如图6a的虚线位置所示,限制器610可移动至存储位置,因为整个限制器610被定位在远端开口608的近端并且可选地完全定位在管腔604的外部。由此,例如当堵塞开口的可能性低时,用户可以选择不受限制地使用吸出装置。限制器610在处于存放位置中时可变形,为此,限制器610具有活动铰链640,支撑臂612形成活动铰链640的一部分或全部,该活动铰链640在存储位置中变形。
137.挡块614可以是支撑臂612的一部分,因为支撑臂612的远端简单地形成了挡块614。此外,限制器610也可以简单地是轴的延伸部的一部分。最后,限制器610和与限制器610关联的方法可以与本文描述的任意其他装置一起使用,包括与切割和/或去除晶状体关联的那些装置。此外,可以通过简单地提供y形臂642和形成围绕切割装置的密封的合适的连接器641,通过本文描述的任意装置的管腔来使用装置。由此,管腔可以替代本文描述的任意管腔,并且这里具体并入切割晶状体结合抽吸材料的方法以及组合包括与任意抽吸装置耦合的任意晶状体切割装置的装置。例如,参照图6b和6c,在管腔和吸出路径中的y形臂642处设置密封,通过管腔和吸出路径可以引入本文描述的任意切割装置(或另一切割装置)。图6b示出了密封位于中心而不是在y形臂上,因此切割装置直接延伸穿过管腔,在切割装置与轴之间的环形空间中具有吸力。此外,可以提供可以是同心的或单独的冲洗管腔,并且可以用本文描述的任意方法或组合方法来实践冲洗过程,并且如在一个或多个实施方式中所示,这种方法被具体地并入这里并明确地并入未示出的实施方式中。
138.在使用中,轴的远端被定位在眼睛中,以便用于眼睛上的任意手术,包括白内障手术。在白内障手术期间,使用吸出去除白内障块。材料可以通过施加将材料汲取到远端开口中的吸力来吸出到远端开口中。与允许朝向远端开口的无限制流动的传统吸出装置相比,限制器610可以帮助减少远端开口的堵塞。如上所述,传统方法的问题是大于吸出口的材料容易接近并由此堵塞开口。必须停止吸出,并且如有必要,材料由另一个器械独立去除。如将在下面更详细地描述的,本文描述了不管是通过提供限制器还是通过提供其他机构来减小堵塞可能性的装置。应当理解,本文描述的装置可以与任意装置一起使用,包括独立的抽吸装置、可重复使用的超声乳化尖端或任意抽吸装置的可自由使用的方面。
139.在另一方面中,描述了组织操纵器和操纵组织的方法。组织操纵器可被定位在单独的外科手术装置或并入如这里其他地方所述的吸出的外科手术装置上。图8a至图8c例示了具有带管腔664和远端开口668的轴662的组织操纵器660的实施方案。吸力源可以耦合至管腔664,吸出与组织操纵器660一起使用或与组织操纵器660分开使用。冲洗液也可以用这里并入的其他轴供应,并且这里明确地提供了这种并入。组织操纵器660可包括多个环。在一些实施方案中,第一环670具有第一腿672和第二腿674,第一腿672和第二腿674中的至少一个延伸穿过管腔664。当第一腿672和第二腿674前进穿过管腔664并从远端开口668离开时,第一环670可从图8a的塌陷位置移动到图8b的扩张位置。第二环676也可以具有第一腿678和第二腿680,第一腿678和第二腿680延伸穿过管腔664。当第一腿和第二腿前进穿过管
腔并从远端开口668离开时,第二环676也可从塌陷位置移动到扩张位置。轴662可以被定尺为将轴的远端引入到眼睛中。
140.第一环670可以具有界定面积的无偏形状,该形状以使该面积最大化的方位or来限定。面积的有效直径等于具有相同面积的圆的直径。当从塌陷位置移动到扩张位置时,第一环670朝向无偏形状移动。第一环670的面积的有效直径可以是4.5mm至6.5mm或可以是5.0mm至6.0mm。第一和/或第二环670、676的无偏形状的有效直径可以分别在第一和/或第二环670、676的扩张位置的有效直径的20%以内。这样,第一和/或第二环670、676提供软部署并且在使用期间是灵活的。超弹性材料的使用进一步增强了第一和第二环670、676的柔韧性。为此,虽然可以使用具有任意合适的横截面形状的任意尺寸,但第一和第二环670、676可以由具有大约0.003”至大约0.006”的直径的超弹性金属线形成。
141.第一和第二环670、676各由方位oa限定,该方位oa在沿着每个方位观察时使处于扩张位置时的第一环670和第二环676的面积最大化。第一和/或第二环670、676的方位可以在垂直于轴662的远端处的纵向轴线la的45度内。第一环670可以与第二环676隔开,以在第一和第二环670、676处于扩张位置中时在其间限定体积v,其间的体积v为48-84mm3。如将在下面更详细地描述的,组织操纵器660的多个环可以在环的扩张期间或在环的扩张之后的单独步骤中彼此隔开。
142.组织操纵器660还可以包括定位在第一环670与第二环676之间的中间元件或第三环682。中间元件682可以包括在第一环670与第二环676之间延伸的互连元件681。如图9和10所示,互连元件681可以是与第一环670和第二环676一体形成的元件。另选地,互连元件681可以是在第一环670与第二环676之间延伸的挠性细丝,如图8b所示。第三环682可以具有第一环670和第二环676的特征。使第三环682的面积最大化的方位oa可以在与纵向轴线la垂直的30度内。
143.第一环和第二环670、676在它们之间提供受控量的露出表面,以控制并且可选地切割受控量的材料。第一环670与第二环676之间的暴露表面es具有15mm2至60mm2的面积。换句话说,在第一环670与第二环676之间的露出表面在扩张位置(或无偏位置,因为它们可能相同)是有效直径的3到10倍。
144.当沿相对于第一和第二环670、676的定向轴的径向向内方向观察时,第一环670与第二环676之间的露出表面可以具有2-8、2-6、2-4甚至仅2个独立的单元。当相对于第一和第二环670、676径向向内观察暴露表面es时,暴露表面es的面积至少比位于第一环670与第二环676之间的中间元件682的面积大4倍。这样,与一些网式装置相比,中间元件682不占用过多量的空间。
145.第一环670也可以形成为使得至少80%的环与第二环676相距1.5-3.5mm。第一和第二环670、676(和可选的中间元件682)也可以构造为在塌陷时切割内部包含的材料。
146.再次参照图8b,装置660可以包括在第一环670处于扩张位置时从轴的远端延伸的第一支撑元件690。第一支撑元件690可以是延伸到自由端691的细长元件。当沿着最大化第一环670的面积的方位oa观察第一环时,第一支撑元件690被定位成自由端691被定位在第一环670的面积内。当处于扩张位置时,第一环670具有有效直径,而第一支撑元件690延伸到第一环670的面积中,使得当沿着方位oa观察时,自由端691被定位在第一环670内的、第一环670的有效直径的0.05至0.30倍处。还可以提供以相同方式与第二环676配合的第二支
撑元件692。
147.参照图11,第一环670和/或第二环676可以具有至少一个互连元件695,该互连元件695从环上的第一连接696延伸到同一环上的第二连接697,或者环可以取决于期望的用途没有任何这种互连元件。例如,可以提供如图11所示的网状材料,或者环可以没有互连元件,使得开口区域是自由的。第一环670的所有讨论和限制适用于第一环670、第二环676以及第三环682,而且第一支架690的讨论适用于第二支架692。第一支架690可以独立地或与第一环670同时地延伸。第一支架690通过延伸到由环形成的开口区域中来帮助将材料固定在第一环670内。
148.第一和第二环的第一和第二腿可以在管腔内移动。另选地,第一环670的第一腿672和第二腿674耦合到延伸穿过管腔的致动器,使得致动器的移动使第一腿672和第二腿674在塌陷位置与扩张位置之间移动。第二环676的第一腿678和第二腿680耦合到延伸穿过管腔的致动器,使得致动器的移动使第一腿678和第二腿680在塌陷位置与扩张位置之间移动。第一环670和/或第二环676可以在扩张位置中完全定位在远端开口的远端。当处于塌陷位置时,第一环670和第二环676可以包括在超弹性范围内的超弹性材料。
149.参照图12,组织操纵器700可具有凹元件702,该凹元件702耦合到第一环704,以形成接收材料的篮706。凹元件702可以以如下方式具有一端708和另一端710:一端708与第一环704一体形成,另一端710可独立于第一环704的第一腿714和第二腿716在轴713的管腔712内移动。交叉元件715也与第一环704一体形成,并且也可以与凹元件702一体形成。另选地,两端708、710可以与环704一体形成。
150.在图13中示出了另一种组织操纵器700a,其中,相同的附图标记指代相同或类似的结构。凹元件702a,可以是2-3个凹元件702a。操纵器700a具有带有第一腿714a和第二腿716a的第一环704a。凹元件702a的第一端708a可以与环704a一体形成,而第二端710a可以在管腔712a内独立地移动。环704a和凹元件702a可以由宽度与厚度之比大于3:1的带状材料制成,以与具有1:1的比率的金属线相比,产生更封闭的篮706a。参照图14,示出了另一种组织操纵器502,其中,相同或类似的附图标记指代相同或相似的结构。操纵器700b具有第一环704b,该第一环704b具有作为网703的凹元件702b。网703可以一体形成或是附接到环704b的单独元件。
151.参照图15,示出了另一种组织操纵器700c,其中,相同或类似的附图标记指代相同或相似的结构。操纵器700c具有带有凹元件702c的第一环704c,该凹元件可以是一体形成在第一端708c处的2-3个凹元件702c,并且操纵器可以具有第二端710c,该第二端710c可在轴713c内的管腔712c内独立地移动或是附接到环704c的单独元件。操纵器700c在环的任意两个侧之间没有互连元件,并且在凹元件702c之间也可以不包括互连元件。
152.参照图16和17,图16中示出了另一种组织操纵器700d,其中,相同的附图标记指代相同或类似的结构。组织操纵器700d具有分别具有对应的凹元件702d和702e的第一环708d和第二环708e。第一篮706d和第二篮706e可在图17的嵌套位置与两个篮如图16所示的彼此相对的位置之间移动。
153.再次参照图12,进一步描述了组织操纵器700,并且理解,本文描述的所有方面适用于所有其他组织操纵器700a-700d,并且对于每个操纵器明确并入。环704具有界定面积的无偏形状,该形状以使该面积最大化的方位oa来限定。面积的有效直径等于具有相同面
积的圆的直径。当从塌陷位置移动到扩张位置时,第一环704朝向无偏形状移动。第一环704可以具有4.5mm至6.5mm或5.0mm至6.0mm的有效直径。应当理解,这里考虑其他尺寸。如这里所用的,环的“面积”由使面积最大化的方位oa确定。第一环在第一环方位在垂直于轴713的远端处的纵向轴线la的45度内的情况下扩张。
154.再次参照图13,示出了可与本文描述的任意装置和方法一起使用的旋转切割器740。旋转切割器740在远端744处具有切割元件742,该切割元件可以是一系列齿746、尖锐的边缘、脊钉或任意其他合适的形状。如这里所用的旋转可以意指在一个方向上旋转,然后在另一方向上返回,而不偏离本发明的范围。旋转切割器740可以根据期望独立地定位和移动以便使用,或者可以固定在由虚线工作位置750示出的工作位置。当在工作位置750时,旋转切割器740可以从轴713a的远端751凹进,使得旋转切割器740不从轴713a的远端处的开口754露出。本文描述的组织操纵装置可用于推动、汲取、挤压或以其他方式操纵组织,以使其与旋转切割器740啮合。旋转切割器740还可在其中具有用于吸出材料的吸出管腔752。
155.现在参照图18a至18d以及图19,示出了切割装置800,该切割装置用于切割眼睛中的材料,并且在特定的应用中,用于切割整个晶状体,同时将其容纳在囊袋中。切割装置800具有轴802,该轴802具有在图18a的第一位置与图19的第二位置之间可相对于彼此移动的第一轴部804和第二轴部806。细长元件808具有耦合到第一轴部804的第一端810和耦合到第二轴部806的第二端812。切割装置800形成环814,细长元件808的至少一部分与轴802一起形成环814。当第一和第二轴部804、806从第一位置移动到第二位置时,环814从图18a的塌陷位置移动到图19的扩张位置。环814可以被扩张为使环814在囊袋与整个晶状体之间前进。材料被定位在环814的开放区域813中,然后通过使环804塌陷来切割。
156.细长元件808以促进切割囊袋内的整个晶状体的方式扩张。细长元件808可以具有第一挠性部820和可选地第二挠性部822,其间具有中间部824。细长元件808最初如图18c所示地横向向外扩张。当第一挠性部820和第二挠性部822开始弯曲时,环814具有分别从中间部824向近端和远端延伸的近端部826和远端部828。挠性部的弯曲刚度可以比中间部高至少1.5倍。此外,当如图18a所示的塌陷时,细长元件808可处于无偏位置,细长元件808变形,以使环偏转并扩张。细长元件808也可以具有预设形状,该形状促进移动到扩张位置,同时需要较小的力来使细长元件808变形。
157.现在参照图20a至20c以及图21a至21b,示出了另一种切割装置900,该切割装置用于切割眼镜中的材料,并且在特定的应用中,用于通过露出晶状体前表面的开口op(诸如撕囊)切割囊袋cb内的整个晶状体wl(参见图19)。轴902具有第一轴部904和第二轴部906,它们可在图20a和图20b的位置之间相对于彼此移动,使得由装置900形成的环908从塌陷位置移动到扩张位置。细长元件910具有耦合到第一轴部904的第一端912和耦合到第二轴部906的第二端914。环908至少部分地由细长元件910形成,并且环908也由轴902的一部分形成。
158.环908被扩张为使得当第一和第二轴部904、906从第一位置移动到第二位置时,第一端912具有相对于与细长元件910的第二端914相邻的轴902改变至少120度的角度ca的纵向方位lfe。图21a示出了角度ca为大约180度。
159.轴902还可以包括挠性远端920,细长元件910的第一端912耦合到轴902的挠性远端920。轴902的挠性远端920可以有助于改变第一端912相对于与第二端914相邻的轴902的纵向方位的方位。当第一和第二轴部从第一位置移动到第二位置时,挠性远端920的方位可
改变至少30度的角度co。
160.细长元件910的第一端912可以具有销钉连接,使得第一端912相对于第一轴部904旋转至少120度的角度,并且当第一和第二轴部从第一位置移动到第二位置时,该角度可以为180度+/-45度。环908具有远端部930,随着环908从塌陷位置移动到扩张位置,该远端部930向远端前进超过轴902的远端。细长元件的第一端912改变方位,使得随着环908从塌陷位置移动到扩张位置,环908向远端前进超过轴902的远端。第二端914还可以具有到第二轴部906的可旋转连接932,诸如销钉连接934。当第一轴部904和第二轴部906从第一位置移动到第二位置时,第二端914可以相对于与第二端相邻的轴旋转并改变方位90度+/-45度。细长元件912可以处于图20a中的无偏位置,细长元件912变形到图21a和图21b的位置。当然,细长元件912也可以具有类似于图21b的预设形状。
161.参照图22a、22b、23a以及23b,示出了用于从眼睛抽吸材料的另一种装置940。如将在下面更详细地描述的,装置940被构造为施加脉冲真空和可选地在脉冲之间具有短回流的脉冲真空。该脉冲真空配置允许通过更大的抽吸管腔直径施加全真空压力,而不会引起前房塌陷。由此,可以施加全真空,但是真空以短脉冲例如通过阀调施加。本文描述的其他抽吸装置的所有方法和物理特性同样适用于装置940,并且这里明确并入所有这种用途和特性。例如,吸出路径的体积、管腔的尺寸以及远端吸出体积和使用方法全部明确地并入这里。
162.装置940可以包括具有细长轴961的手持单元960,该细长轴耦合到手持单元960的壳体962并且从其延伸。管腔963穿过轴961延伸到远端965处的开口964。管腔963限定了从吸力源延伸到开口964的吸出路径966的一部分。吸出路径966在吸力源和远端吸出体积967的吸出压力的影响下限定吸出体积。吸力源可以在手持单元960内、上或附接到手持单元960。
163.装置940具有阀968,该阀耦合到手持单元960并沿着吸出路径966定位。阀968可从图22a的关闭位置移动到完全打开位置,该关闭位置阻塞吸出路径966,该完全打开位置限定由阀968提供的最大吸出路径。图22b示出了部分打开的阀。阀968还可以如下所述的定位在关闭位置与完全打开位置之间的任意位置。阀968可相对于孔径970移动,该孔径由阀968打开和关闭,以打开和关闭吸出路径966。阀968可以是可移动元件971,该可移动元件耦合到用于移动和定位阀968的金属线972。弹簧973作用在阀968上,以使关闭的阀968偏置。
164.金属线972可以耦合到图23a和23b所示的致动器942,该致动器942被构造成位移和定位阀968。致动器942可以包括如下所述地使用的脚踏板944。也可以使用任意其他合适的致动器942。例如,致动器942可以定位在手持单元960上,或者致动器可以远离手持单元960。脚踏板944可以处于如图23a所示的断开或静止位置,在该断开或静止位置没有提供吸力。脚踏板944具有第一枢轴945,该第一枢轴945耦合到安装到基座947的支架。脚踏板944具有第二枢轴948,该第二枢轴948位于连杆机构950的第一端949附近,并且还可以包括抑制脚踏板944的运动的阻尼器(未示出)。连杆机构950的第二端951具有枢轴939,并且可以包括指示脚踏板944的位置的传感器941。随着脚踏板944被按下,可以以任意合适的方式(诸如旋转位置传感器941)测量位移量。连杆机构950的第二端951可以附接到相对于基座947可滑动的支撑滑板946。
165.致动器942可以具有马达956,该马达驱动耦合至滑块958的连接臂957。滑块958耦
合至金属线972(参见图23a和23b),使得马达956的控制控制阀968的位置。致动器942还耦合到真空源974,该真空源可以是任意合适的源,例如,吸力源可以包括泵、文丘里管,或者可以是具有如这里其他地方所述的弹簧加载柱塞的注射器。吸力源可以在如本文其他地方所述的手持部内或远离手持部。致动器942以任意合适的方式并且如这里其他地方所述的控制吸力的大小。阀968可移动到关闭位置与完全打开位置之间的部分打开位置,并且可以定位在其间的任意位置。部分打开位置的横截面流动面积可以是完全打开位置的横截面流动面积的5-15%。如这里使用的,打开百分比通常与阀968相对于孔径970的纵向位置成比例。部分打开位置也可以是小于完全打开位置的横截面流动面积的15%的打开位置。
166.支撑滑板946可滑动地安装到基座947,以在脚踏板944位移时横向位移。支撑滑板946还承载马达956。真空源974独立地安装到基座947,使得金属线972可以独立于耦合至连接器的管腔(未示出)移动。控制系统991耦合到马达956和真空源974,以控制如本文描述的这些部件中的每一个。
167.致动器942可操作地耦合至阀968和吸力源974,并且可以任意传统方式操作。例如,阀968可以在第一位置与第二位置之间移动,该第二位置露出更多的孔径970,以周期性地增加和减小吸出压力。
168.根据另一个方面,如现在描述的,致动器942还可以控制阀968和吸力源974。当致动器942最初从图23a的位置位移时,在致动器942从断开位置位移的第一阶段期间,致动器942将阀968移动到部分打开位置。在第一阶段期间,随着致动器942的位移增加,真空源974增加真空/吸出压力。阀968可保持在部分打开位置,直到真空压力达到目标最大压力的至少75%为止,该目标最大压力可以是570mmhg(目标压力为760mmhg)。第一阶段也可以一直继续到达到目标压力为止。换句话说,致动器942将阀968控制为不超过半开,直到在致动器942的位移的第一阶段期间达到目标压力为止。目标压力也可以在不考虑实际压力的情况下通过在不调制压力的情况下增加吸出压力直到达到全吸出压力为止来简单地达到,只要结果以本文描述的方式达到目标压力即可。
169.一旦达到目标压力,则致动器942(例如,脚踏板944)的进一步位移限定第二位移阶段,因为吸出压力以至少1hz(或1-10hz)的速率增加和减小。在第二阶段期间,阀968在第一位置与第二位置之间移动,第二位置沿着流动路径提供比第一位置更大的横截面流动面积。第一位置可以是部分打开位置或可以是关闭位置,并且类似地,第二位置可以是完全打开位置或任意其他中间位置,只要它提供比第一位置更大的流动面积即可。当阀968在第一位置中打开时,在第一位置中的横截面流动面积可以是与阀968的完全打开位置相关的横截面流动面积的至少5%或5-15%。第一阶段和第二阶段可以提供对立即调节/循环吸出压力的一些系统和方法的改进。第一阶段可以帮助建立期望的吸出压力,然后该期望的吸出压力过渡到循环/周期性的或调制的第二阶段。
170.致动器942还可在第二阶段之后(或直接在第一阶段之后)具有第三位移阶段。在第三阶段期间,致动器942还使阀968在第一位置与第二位置之间移动,阀968的第二位置沿着流动路径提供比第一位置更大的横截面流动面积。第三操作阶段使阀在第一位置与第二位置之间移动,第二位置的横截面流动面积大于第一位置。随着致动器942位移增加,占空比增加,使得阀968增加相对于第一位置更靠近第二位置的时间。在该操作阶段期间,阀968优选地以至少1hz的速率移动。
171.另选地,致动器942可操作地耦合到阀968,使得致动器942在第三阶段期间的位移的增加使得阀968的第二位置限定用于吸出路径的、增大的横截面流动面积(例如,例如,越来越多的孔径被露出)。第一位置在第三阶段期间可以保持不变,并且可以是部分打开位置。换句话说,在第三阶段期间,致动器942可操作地耦合至阀968,使得致动器942(脚踏板944)的位移的增加增加了第一位置与第二位置之间的距离,使得在各周期期间露出更多的孔径。在第二阶段和第三阶段期间,真空源可以维持在全吸出压力下。如这里使用的,术语“第一”、“第二”以及“第三”可以互换,尤其是在权利要求中。例如,权利要求可以形成为在省略刚刚描述的第二阶段时将刚刚描述的第一阶段和第三阶段叙述为第一阶段和第二阶段。此外,第二阶段可以形成第三阶段的一部分,因为当发起第三阶段时,建立第二阶段。
172.阀968还可以沿着吸出路径移动,以通过使材料沿与材料吸出相反的方向移动穿过吸出路径来清理吸出路径。为此,阀968可向远端移动超过关闭位置,使得阀968沿与吸出相反的方向(即,穿过吸出路径朝向开口964向远端)推动材料。阀968可在每个移动周期(从第一位置到第二位置,再返回到第一位置)期间使材料沿与吸出相反的方向位移。这样清理吸出路径中的材料,这可以有助于逐出被捕捉在吸出路径中或粘到尖端的材料。阀968的位移受挡块975限制,该挡块975限定由阀968位移的体积。
173.参照图24a至图24b,示出了另一装置940a,该装置具有可调挡块975a,该挡块调节阀968a的最大位移,由此调节由阀968a位移的体积。可调挡块975a耦合到翼形螺钉976,该翼形螺钉可由用户手动操作,以调节可调挡块975a的位置。挡块975a定位在阀968a中的腔977中,并且当阀968a接触挡块975a时限制阀968a的运动。参照图25a至图25b,示出了另一装置940b,该装置具有可调挡块975b,该挡块耦合至与阀968b啮合的凸轮978。用户利用刻度盘986使凸轮978旋转,以调节阀968b的最大位移和位移材料的体积。
174.可调挡块975a、975b还提供按需清理能力。例如,挡块975a、975b可以初始定位为使得最大远端位移对应于关闭的阀位置。当期望逆行清理时,例如为了逐出管腔中或粘到远端的材料时,挡块975a、975b可以移动到允许远端行进超过关闭位置的位置。当阀968向远端行进超过关闭位置时,阀968用沿着o形圈979的吸出路径密封,使得当沿与吸出相反的方向(即朝向远端开口)移动材料时,阀968就像容积泵一样起作用。阀968还沿吸出方向汲取材料(在沿相反方向移动材料之后),使得阀968在吸出方向上像容积泵一样起作用,这可以帮助随着孔径970被打开在倒流期间重新建立吸流。
175.在图26中示出了用于抽吸眼睛中的材料的又一个装置940c。装置940c包括流体耦合到管腔981的逆流通道980,并且逆流元件982被构造为将流体沿相反方向穿过逆流通道980移动到管腔981中,以清除管腔981和粘到远端的材料。逆行元件982可以是柱塞/活塞983、气囊或用于移动流体的任意其他合适的机构。虽然可以使用任意其他合适的致动器,但是活塞983耦合到拇指致动器984。图24a至24b和图25a至25b的装置的可调挡块975a、975b以及图26的逆流通道980和逆流元件982可以并入到图22和23的装置940(或本文描述的任意其他合适的装置)中,并且这种组合应包括其他装置的所有用途、方法以及特性适用于该组合并明确地并入这里。
176.本文描述了被构造为执行在眼科手术中有用的一个或多个功能的各种装置,这些功能包括但不限于在眼睛中的手术期间切割、破碎、乳化、抽吸和/或吸入存在于目标位置的材料。如这里所用的“材料”可包括流体(来自眼睛或提供给眼睛)、组织或组织的碎片(诸
如晶状体组织、玻璃体组织、细胞)以及在眼睛中的手术(例如白内障手术、玻璃体切除手术等)期间可能存在的任意其他流体或组织或其他材料。本文描述的被构造为施加真空的装置也可以构造成递送流体。本文描述的施加真空和/或递送流体的装置还可以被构造为在外科手术部位内和附近切割、破碎、乳化或以其他方式制造更小的材料。本文描述的允许施加真空的装置可以使用具有或不具有点缀的脉冲正压的脉冲真空来提供该真空。
177.本文描述的装置的各种特征和功能可以应用于本文描述的一个或多个装置,即使它们可能没有组合地明确描述。还应当理解,本文描述的装置的各种特征和功能可以应用于本领域已知的传统装置和系统,这些传统装置和系统对于在外科手术部位处或附近切割、破碎、乳化或以其他方式冲击组织也是有用的,包括但不限于:超声乳化系统、玻璃体切除术系统以及用于执行白内障手术或玻璃体切除手术等的其他工具等。
178.图27a至27h和图28a至28n例示了被构造为在眼睛中的手术期间切割和抽吸材料的装置的相关实施方案。装置允许通过透明的角膜切口以微创内路法执行白内障手术。本文描述的装置依赖更少的操纵和更少的能量来从眼睛去除晶状体。装置被构造为凭借单次切割来产生更小的晶状体碎片,这些碎片更容易通过小切口去除,几乎没有超声乳化。本文描述的装置可以是多合一装置,该装置被构造为将晶状体原位切割成小晶状体碎片,这些碎片可以以抽吸由相同的装置去除,并且几乎没有超声乳化。
179.图27a至27h例示了包括手持单元2760的装置2700,该手持单元2760具有远端细长构件或轴2761,该远端细长构件或轴耦合至手持单元2760的壳体2762并从其纵向延伸。诸如在白内障手术期间,轴2761的至少远端末端区域被构造为以微创的方式插入到眼睛中,以切割、抽吸和/或注入眼睛中的材料。轴2761可以是被构造为振荡的细长构件。
180.如这里使用的,“振荡”或“振荡移动”可包括根据模式发生的任意周期性的重复移动,并且不需要是正弦的。振荡移动可以包括相对于手持单元来回发生的往复滑动移动。振荡移动可包括使细长构件沿着其纵向轴线重复地前进和缩回。重复的前进和缩回可沿着纵向轴线发生,但是振荡移动所采取的路径不需要是线性的。移动路径可以沿着椭圆路径或曲线路径非线性地发生(即,在移动的至少一部分期间远离纵向轴线)。移动路径可以旋转地、轨道地、扭转地围绕装置的纵向轴线,或者是相对于装置的纵向轴线的其他类型的移动,包括细长构件前后以及左右移动的三维移动。振荡移动包括重复移动模式的轮廓,这些重复移动模式可以根据移动发生在振荡周期中的何处而改变。振荡移动的轮廓可以是不对称的,如将在下面更详细地描述的。
181.这里考虑了细长构件的各种构造中的任意一种。在一些实施方案中,细长构件可以包括管状振荡细长构件,该管状振荡细长构件具有延伸穿过它的管腔,使得流体可以通过振荡细长构件来递送和/或抽吸。在其他实施方案中,振荡细长构件不是管状的,而是形成为实心元件。在该实施方案中,振荡细长构件可以在外管状构件以及在轴之间的间隙内往复运动,这些轴被定尺为接收流体和/或向治疗部位递送流体。在将细长构件描述为具有内外构件的情况下,细长构件也可以由单个管状元件形成,该单个管状元件构造成相对于手持单元振荡,以切割和抽吸材料。在细长构件被描述为具有同轴地设置在外管状构件内的内细长构件的情况下,内细长构件可以是实心杆并且不需要包括内管腔。在一些实施方案中,细长构件具有可以包括针尖的尖锐切割尖端或斜面。
182.术语“针头”或“针尖”的使用不需要暗示细长构件具有像注射器针头一样延伸穿
过它的管腔。例如,具有尖锐针尖的细长构件可以是延伸穿过外管状构件的实心元件,并且抽吸力通过外管状构件的管腔来施加,使得流体和组织被汲取到在内外构件之间延伸的环形间隙中。在其他实施方案中,细长构件是切割管,该切割管具有内管腔和被构造为切割组织的远端边缘。远端边缘可以是尖锐的,同时到管中的开口可以被切割成与细长构件的细长轴线成一角度或垂直于细长构件的细长轴线。切割管可以具有内管腔,该内管腔被构造为通过其抽吸材料,诸如眼晶状体材料、晶状体碎片和/或来自眼睛的流体。由此,抽吸力可以通过内细长构件的内管腔施加。然而,抽吸力也可以通过管状外构件的管腔来施加。管状外构件与内构件之间的间隙可以在例如大约0.001”到大约0.100”之间变化。在一些实施方案中,抽吸力可以通过具有管腔的内细长构件和穿过外管状构件的管腔这两者来施加。
183.再次参照图27a至27h,轴2761可以是玻璃体切除术式的切割元件,因为它可以具有细长构件2755,该细长构件延伸穿过并同轴设置在外管2759内,使得细长构件2755在外管2759内往复滑动。与诸如上述图6a至6c所示的尖端相比,这种样式的切割元件对于切碎和去除较硬的晶状体材料特别有用。外管2759可以是耦合到壳体2762的远端末端区域的静止管状元件。外管2759可以由保持器2743固定地耦合在壳体2762的远端末端区域的内部。保持器2743可以是甜甜圈形状的元件,该元件被构造为接收穿过其的外管2759,使得保持器定位在外管2759的近端区域周围。细长构件2755也可以是管状元件,但与外管2759不同,是可移动的,使得它可在外管2759的管腔内振荡。细长构件2755的远端尖端可形成为切削刃2754。在一些实施方案中,切削刃2754是短的尖锐斜面(参见图27c至27d)。外管2759和细长构件2755中的每一个可以在它们各自的远端末端区域附近具有开口2753、2758。在一些实施方案中,开口2753、2758穿过相应的侧壁形成(参见图27c至27d)。细长构件2755的切削刃2754和外管2759的开口2753一起形成端口2764。端口2764的尺寸可以根据细长构件2755相对于外管2759的位置而变化。在操作中,随着细长构件2755在外管2759内往复运动,组织可通过端口2764进入到轴2761中并被切削刃2754切细。
184.装置2700可包括可去除或可缩回的外护套,该外护套例如用于在轴插入到前房中期间在开口2753、2758上滑动。在插入期间,轴的切割区域可以保持被护套覆盖,以防止在切割之前钩住在切口或其他眼睛组织上。在插入后,当操作员准备开始切割和/或抽吸时,护套可以缩回或以其他方式去除。缩回可以由用户手动启动,或者可以在切割和/或抽吸致动时由装置自动缩回。在切割/抽吸完成并且器械准备好从眼睛去除后,可以将护套向远端前进,以再次覆盖开口2753、2758。
185.轴2761在上面被描述为包括延伸穿过外管2759的振荡细长构件2755。外管2759可以是静止的,从而保护轴2761延伸穿过的角膜切口或其他组织免于被细长构件2755的振荡移动影响。轴2761可包括单个管状细长构件2755,它在没有任何外管2759的情况下振荡。然而,优选地是轴2761包括围绕振荡细长构件2755的至少一部分的保护套,例如,以保护角膜免于由于暴露于细长构件2755的振荡移动引起的组织损伤。保护套可以由弹性材料形成,诸如硅橡胶或更硬的金属海波管。保护套可以是可互换的和/或可缩回的。保护套的长度可以变化。保护套可以具有被构造为覆盖轴2761延伸穿过角膜切口的区域的最小长度。护套的颜色可以提供有关护套长度以及它对于什么用途有用的信息。用户可以覆盖振荡细长构件2755,并在手术期间使用不同种类的尖端,例如在切割后进行抛光或清理。更长的保护套长度可以覆盖振荡行程的一半,以在眼睛上更柔软。保护套还可用于防止轴管腔的堵塞,例
如,通过防止组织“棒棒糖修剪(lollipoping)”轴2761的端来防止堵塞。
186.如本文其他地方将描述的,轴2761还可包括被构造成将冲洗液递送至工作部位的冲洗套管。冲洗套管可在保护套的至少一部分上延伸。冲洗套管和保护套可以是可去除的,使得它们与手持单元2760分离。在一些实施方案中,冲洗套管和保护套作为单个单元(例如,作为可去除盖的一部分)一起从壳体去除或单独去除。通常,轴2761(包括保护套和冲洗套管,如果存在)具有最大横截面直径,该最大横截面直径适合于眼睛中的微创手术,以最小化角膜切口尺寸。在一些实施方案中,远端轴2761的最大横截面直径为约1.25mm。最大横截面直径可以小于或大于此直径,例如,直径不超过约2mm,直径不超过约3mm,直径多达约4mm或直径多达约5mm。如这里其他地方所述,相对于延伸穿过轴2761的管腔的内径,来自轴2761的远端开口可具有更小的内径,以减轻堵塞的问题。在一些实施方案中,轴2761的标称内径与远端开口的内径之间的差可以在大约0.003”至大约0.006”之间。在一些实施方案中,轴2761可具有约0.0375”的标称内径,该内径在远端开口处变窄至约0.033”。由此,小于尖端直径的眼组织块可被抽吸到轴2761的管腔中,并且一旦在管腔内部,则由于管腔其余部分的内径大于远端开口的内径,所以不太可能被卡住或引起堵塞。
187.细长构件2755可通过操作地耦合到细长构件2755的驱动机构相对于手持部振荡。驱动机构可变化,包括电动、压电、电磁、液压、气动、机械或本领域已知的其他类型的驱动机构。在一些实施方案中,细长构件2755由驱动机构往复运动,该驱动机构包括容纳在壳体2762内部的马达2756。马达2756的构造可以变化,包括各种旋转马达、步进马达、交流马达、直流马达、压电马达、音圈马达或其他马达中的任意一种。
188.在一些实施方案中,驱动机构包括马达2756,诸如齿轮马达,其具有(直接或经由马达耦合器2789)耦合至旋转凸轮2769的近端的齿轮头2752。旋转凸轮2769可以在相对端处耦合到凸轮从动件2787,该凸轮从动件固定耦合到细长构件2755的近端。齿轮头2752可以被驱动为使旋转凸轮2769旋转,这将马达2756的旋转运动转换成凸轮从动件2787的线性运动,由此转换成细长件2755的线性运动。
189.在一些实施方案中,如图27e至27h所示,旋转凸轮2769可以是大体圆柱形的元件,该元件在近端具有孔2789,该孔2789被构造为接收齿轮头2752。凸轮从动件2787可以具有在近端的孔2790,该孔被构造为接收旋转凸轮2769的远端。旋转凸轮2769可以是桶形凸轮。凸轮2769的远端的外表面具有通道2792,该通道被构造为接收凸轮从动件2787的对应销元件2793。随着齿轮头2752使凸轮2769绕装置的纵向轴线旋转,销元件2793移动穿过在凸轮2769外表面周围的通道2792。在凸轮2769的外表面中的通道2792遵循从凸轮2769的第一近端区域朝向远端末端区域然后从远端末端区域朝向第一近端区域返回的椭圆形路径。随着销元件2793在旋转期间移动穿过通道2792,凸轮从动件2787被推动为沿着装置的纵向轴线轴向移动。凸轮从动件2787在远端方向上移动至少一部分旋转。然后,凸轮从动件2787在近端方向上移动至少另一部分旋转。由此可见,凸轮2769的完整旋转提供了凸轮从动件2787和细长构件2755的往复轴向移动。应当理解,这里考虑了产生细长构件的振荡移动的其他驱动机构。
190.再次参照图27a至27d,细长构件2755可以至少部分地被外管2759覆盖。外管2759可以例如由保持器2743固定地耦合到壳体2762。振荡细长构件2755可以将晶状体材料捕获在切削刃2754与开口2756之间,以切割被汲取到端口2764中的小块晶状体材料。靠近轴
2761的远端2765的端口2764与管腔2763连通,这形成从端口2764引出的吸出路径。形成吸出路径的管腔2763可延伸穿过细长构件2755和/或在细长构件2755与外管2759之间延伸。在一些实施方案中,管腔2763穿过细长构件2755延伸至近端开口2788。如图27b最佳所示,细长构件2755可在近端区域处耦合至凸轮从动件2787。细长构件2755延伸穿过位于手持单元2760内部的真空歧管2774,使得近端开口2788与真空歧管2774的室2789连通。在细长构件2755的振荡移动期间,近端开口2788被维持在该室2789内。在真空歧管2774内施加真空,以通过管腔2763从眼睛抽吸切细的组织。切细的组织在端口2764处进入管腔2763,并通过近端开口2788离开管腔2763。多个密封2794,诸如提供低移动阻力的滑动o形圈,可防止和/或充分地减少围绕轴2761的流体通过。装置2700可耦合至远离手持单元2760或在手持单元2760内部的吸力源,使得装置2700是如被本文其他地方所述的完全手持装置。而且,如本文其他地方所述,细长构件2755不需要包括外管2759,并且可以自行执行组织的破碎。在一些实施方案中,细长构件2755可包括壁,该壁具有穿过壁的端口2764,其中,该端口具有切割表面。在其他实施方案中,细长构件2755可包括切割尖端,例如斜面切割尖端。切割尖端可以包括从延伸穿过细长构件2755的管腔的远端开口。可以通过细长构件2755的管腔、外管2759的管腔或两个管腔抽吸眼材料。
191.端口2764可以具有为完全切碎和抽吸眼组织而优化的宽度。在一些实施方案中,端口2764可具有大于0.05”直至约0.175”的轴向长度。端口2764的宽度可以在0.015”至0.06”之间。在全真空条件(例如,约15inhg直至约inhg)下的较宽端口2764可能增加前房塌陷的风险。由此,如这里其他地方所述,可以例如通过致动一个或多个阀以负压脉冲施加真空。另外,通过在负压脉冲之间施加正压,可以以短回流散布负压循环。如这里其他地方所述,负压脉冲和正压脉冲的循环可以非常快速(例如1hz)并且可以非常小的体积(例如5cc)。
192.如所提及的,本文描述的装置可以包括一个或多个用户输入或致动器,诸如按钮、滑块、开关或其他输入。一个或多个用户输入可以在装置本身上、远离装置或这两者。装置可以包括启动装置的每个功能(即,抽吸,包括在脉冲之间具有回流的脉冲真空、切割、注入等)的单独输入。另选地,输入可以是启动装置的多于单个功能的多向按钮。例如,该装置可以被构造为真空和切割。一个或多个输入可以启动仅真空功能和真空加切割功能。通常,不期望没有真空的切割,然而,这里也考虑仅切割功能。作为示例且不限制,用户可以启动第一按钮或将按钮置于第一位置,以打开仅真空功能。在启动第一按钮之后,用户然后可以启动第二按钮或将按钮置于第二位置,以打开真空加切割功能。然后,用户可以在继续真空的同时开始切割。在一些实施方案中,仅在第一按钮启动发生之后才可以进行第二按钮启动。在下面更详细描述的另一个实施方案中,输入可以是多向致动器,该致动器具有被构造为开启真空并使细长构件振荡的第一位置(即真空加切割功能)和被构造为在穿过细长构件的真空继续时暂停细长构件的振荡的第二位置。
193.图28a至28n例示了装置2700的完全手持实施方案。装置2700包括手持单元2760,该手持单元具有远端细长构件或轴2761,该远端细长构件或轴耦合到壳体2762并从壳体纵向延伸。轴2761可以是被构造为相对于手持单元2760往复滑动的振荡细长构件。如这里其他地方所述,轴2761可以被构造为经受其他类型的移动,包括旋转、轨道等。另外,振荡细长构件可以是管状的且具有延伸穿过它的内管腔,使得可以通过振荡细长构件来递送和/或
抽吸流体。在其他实施方案中,振荡细长构件不是管状的,而是形成为实心元件。在该实施方案中,振荡细长构件可以在外管状构件以及在轴之间的间隙内往复运动,这些轴被定尺为接收流体和/或向治疗部位递送流体。
194.再次参照图28a至28n,轴2761可以是玻璃体切除术式的切割元件,该元件具有延伸穿过外管2759并同轴地设置在外管2759内的细长构件2755,该外管操作地耦合到驱动机构,该驱动机构被构造为使细长构件2755以如上所述的往复振荡方式滑动。靠近轴2761的远端2765的端口2764与管腔2763连通,这形成从端口2764通向真空岐管2774的吸出路径。管腔2763可穿过细长构件2755延伸到细长构件的近端开口2788。在其他实施方案中,管腔2763可在外管2759的内表面与细长构件2755的外表面之间穿过外管2759从管腔2763延伸到近端开口2788。近端开口2788与真空歧管2774的真空室2703连通。可以在真空歧管2774内施加真空,以通过管腔2763从眼睛抽吸切细的组织,使得来自管腔2763的材料排空到真空室2703中。
195.如上所述,装置2700可以包括在手持单元2760内部找到的吸力源或真空源。真空源可以是具有各种构造中的任意一种的泵,包括但不限于波纹管机构、隔膜泵、文丘里泵、捕集泵、容积泵、再生泵、动量传递泵、微型泵等。真空源无需限于活塞泵,并且可以并入被构造为在细长构件的管腔内生成负压的各种机构中的任意一种。
196.如图28e至28k最佳所示,真空歧管2774可耦合到活塞歧管2798,使得真空歧管2774的真空室2703与活塞歧管2798中的一个或多个泵室2705流体连通。活塞歧管2798收容可在相应的泵室2705内移动的活塞2799,泵室由诸如位于装置的近端内的驱动机构(诸如马达2756)提供动力。由马达2756提供动力的一个或多个活塞2799在泵室2705以及真空室2703内生成真空,以便通过轴2761抽吸材料。在一种实施方案中,装置2700可以包括一个、两个或三个活塞2799,它们可移动地定位在相应的泵室2705内。应当理解,任意数量的活塞2799可定位在相应的泵室2705内。在其泵室2705内来回弹跳的多个活塞2799产生以负压脉冲递送到细长构件的管腔的远端部的脉动真空或全真空。脉动真空允许通过远端轴2761施加全真空而没有前房塌陷的风险。
197.在一些实施方案中,负压的循环包括被短时段的真空降低或无真空点缀的短时段的真空。在一些实施方案中,负压的循环包括被短时段的正压点缀的短时段的真空,从而在活塞移动的每个循环期间导致穿过远端轴2761的流体短回流。不管是否在真空脉冲之间施加正压,脉动真空都会通过细长轴产生不连续负压脉冲,该负压可以在大约10inhg到大约30inhg之间,优选尽可能接近全真空。在一些实施方案中,装置可以以循环频率通过细长构件的内管腔产生不连续负压脉冲。装置还可以产生具有相同循环频率的不连续正压脉冲。由此,不连续负压脉冲散布有不连续正压脉冲。脉冲的循环频率可以是较快的频率,例如,至少约0.5hz至约5000hz、或在1hz至4000hz之间或约10hz至约2000hz。不连续负压脉冲以循环频率通过开口将第一数量的材料抽吸到内管腔中。不连续正压脉冲通过开口从内管腔以循环频率排出第二数量的材料。每个周期被移动的材料的体积可以变化,但是通常较小,例如,在大约0.1ml至大约1.0ml之间或近似0.5ml。在一些实施方案中,每个脉冲去除的标称流体量为约100微升或在10微升至约1000微升之间。在该流体量的一般范围内,第二材料量可以大致小于第一材料量。不连续负压脉冲可以被减少真空、无真空或相同频率的正压的不连续时段来点缀。
198.真空室2703被构造为经由由单向阀2707调节的相应开口2706与一个或多个泵室2705流体连通。单向阀2707的构造可以变化,包括鸭嘴阀、球止回阀、提升止回阀、截止止回阀以其他类型的阀,它们允许流体沿一个方向流动,并且切断流体沿相反方向的流动。活塞2799在泵室2705内沿第一方向的移动产生真空,使得来自眼睛的材料被汲取到轴2761的管腔2763中,排空到真空室2703中,并通过单向阀2707拉动到泵室2705中。活塞2799在泵室2705内沿第二相反方向的移动将材料从泵室2705排出系统。材料可以从系统排出到耦合到如这里其他地方所述的出口的处处理外壳中。
199.真空歧管2774可另外包括抽空室2709。抽空室2709与真空室2703封闭,使得被汲取到系统中的材料可从系统中清理,而不会通过轴2761往回推出。室2703与2709之间的密封可以由一个或多个o形圈2794提供。如所提及的,真空室2703被构造为通过定位在开口2706内的相应单向阀2707与一个或多个泵室2705流体连通(参见图28l)。抽空室2709通过由相应阀2713调节的其他开口2711与一个或多个泵室2705中的每一个流体连通(参见图28m)。阀2713的构造可以变化,包括球型止回阀。如上所述,活塞2799在它们各自的泵室2705内沿第一方向(例如,朝向装置2700的近端)的移动通过阀2707将材料从真空室2703汲取到泵室2705中。活塞2799在其各自的泵室2705内沿相反的第二方向(例如,朝向装置2700的远端)的移动通过阀开口2711将材料强制到抽空室2709中。在材料的清理期间,在一个或多个泵室2705与真空室2703之间的单向阀2707防止材料回流到真空室2703、管腔2763并从切割尖端流出。然而,在一个或多个泵室2705与抽空室2709之间的开口2711允许材料自由地进入抽空室2709,并最终从抽空室2709的出口2715流出,至少直到流动被阀2713切断为止。如上所述,活塞2799在近端方向上的移动在泵室2705内产生真空。阀2713的球2717被弹簧2719向近端推动远离泵室2705与抽空室2709之间的开口2711,从而打开阀2713。在活塞2799沿远端方向移动时,流体压力在泵室2705内建立,这增加室内的流体压力并将材料推向阀2713的开口2711。阀2713的球2717向远端推挤弹簧2719,使得弹簧2719压缩并且球2717推挤阀开口2711,从而关闭阀(参见图28m)。在阀2713关闭时,泵室2705大致没有材料。在一些实施方案中,一个或多个阀可以是稍微顺应的,诸如像鸭嘴阀的硅橡胶阀。顺应的阀可能随着对其施加反向正压而变形。如果真空室2703与泵室2705之间的阀是顺应阀,那么随着活塞向远端行进并生成正压以从泵室2705抽空材料,正压可能使得顺应阀变形。变形可能引起离开轴2761的流体量的小清理或回流。该回流可发生在活塞2799的每个来回循环中。在一些实施方式中,可由泵室2705的设计进一步优化回流。在泵室2705中,将泵室2705连接至抽空室2709的出口可以位于例如室的侧上,并且被构造为使得活塞2799可以行进超过出口。在该实施方式中,在活塞2799已经向远端移动超过出口之后,没有用于流体抽空的其他路径。因此,随着活塞2799继续向远端行进,在阀2713关闭之后在泵室2705内产生正压力的力矩,这在轴2761的远端引起材料的短回流。
200.如在图28j以及图28n最佳所示的,每个活塞2799可以包括被在活塞头2723a、2723b之间延伸的弹簧2701围绕的细长的中心活塞杆2721。远端活塞头2723a和滑动o形圈密封2794被定位在泵室2705内。活塞杆2721、弹簧2701以及近端活塞头2723b被定位在位于泵室2705近端的活塞歧管2798内的活塞室2704内。远端活塞头2723a、滑动密封2794以及活塞杆2721能够在泵室2705内从近端区域滑动到远端末端区域,以产生真空压力。泵室2705的内部尺寸小于活塞室2704的内部尺寸和弹簧2701的外部尺寸。由此,随着活塞2799朝向
泵室2705的远端末端区域移动,弹簧2701在近端活塞头2723b与泵室2705的下端之间在活塞室2704内压缩。
201.弹簧2701被偏置,以朝向泵室2705的近端向近端推动活塞2799。定位到活塞2799近端的旋转凸轮2769被构造为朝向它们各自的泵室2705的远端向远端推动活塞2799。随着凸轮2769旋转,它针对活塞2799的近端活塞头2723b顺序施加指向远端的力。转而,活塞2799的弹簧2701被顺序压缩。当凸轮2769进一步旋转时,针对近端活塞头2723的指向远端的力被顺序去除,并且弹簧2701顺序向后推动活塞2799,这通过单向阀2707在各个泵室2705内产生真空。
202.如在图28j至28k以及图28e至28g最佳所示的,马达2756的齿轮头2752可以经由马达耦合器2795耦合到旋转凸轮2769。马达耦合器2795可以在近端中具有被构造为接收齿轮头2752的孔2789,并且在远端上具有一个或多个凸出物2796。凸出物2796被构造成与凸轮2769的近端上的对应楔形凸出物2797紧靠并啮合。随着齿轮头2752旋转,凸轮2769旋转。凸轮2769的远端具有凸轮表面2725,该凸轮表面被构造成提供活塞2799的往复线性运动。凸轮表面2725可以是椭圆形、偏心形、卵形或蜗牛形的。在凸轮2769的第一旋转部分期间,近端活塞头2723b沿着凸轮表面2725的倾斜部滑动,并且活塞2799沿着装置的纵向轴线向远端移动。在凸轮2769的第二旋转部分期间,近端活塞头2723b滑动经过凸轮表面2725,使得释放由凸轮2769针对活塞2799的指向远端的力。围绕活塞杆2721的弹簧2701沿朝向活塞室2704的近端区域的近端方向推动近端活塞头2723b。因此,凸轮2769的完全旋转允许每个活塞2799连续轴向移动。细长构件2755的移动可以使用类似的旋转凸轮机构发生,如将在下面更详细地描述的。
203.如图28n最佳所示,活塞挡块2727可以耦合到活塞歧管2798的近端区域。活塞挡块2727可以是围绕旋转凸轮2769的大致圆柱形的元件。活塞挡块2727的远端末端区域可限定一个或多个凸出物2729,该凸出物被构造成凸出到活塞歧管2798中的每个活塞室2704的近端区域中。凸出物2729在定位在其相应活塞室2704的最近端区域处时紧靠相应活塞2799的近端活塞头2723b。例如,如果装置2700包括定位在三个活塞室2704中的三个活塞2799,则活塞挡块2727包括三个凸出物2729,该凸出物被构造为紧靠三个活塞2799中的每个的近端活塞头2723b。活塞挡块2727在弹簧2701以及由此可以实现的泵室2705的总体积扩张时,向活塞2799在近端方向上的线性行进提供硬挡块。凸出物2729在活塞室2704内的相对位置可以是可调节的。在一些实施方案中,调节圈2730可围绕活塞挡块2727的外表面定位,并且可通过手持部2760的壳体中的一个或多个窗口2731供用户使用(参见图28a至28b)。调节圈2730可具有螺纹内表面,该内表面被构造为与活塞挡块2727的外表面上的对应销钉2732啮合。销钉2732被构造为在调节圈2730的螺纹内滑动,使得活塞挡块2727沿着装置的纵向轴线轴向行进。随着将活塞挡块2727调节为相对于活塞歧管2798更远端定位,凸出物2729进一步延伸到活塞室2704中,并限制活塞2799在弹簧2701扩张时在近端方向上的线性行进。反过来,这限制泵室2705的尺寸。随着将活塞挡块2727调节为相对于活塞歧管2798更近端定位,凸出物2729从活塞室2704收回并且不限制(或更小程度的限制)活塞2799在弹簧2701扩张时在近端方向上的线性行进。反过来,这使泵室2705的尺寸最大化。
204.装置2700的手持部2760可以由较刚性的轻质材料形成。手持部2760的至少一部分可以是可去除的,使得装置2700包括被构造为可重复使用的耐用部分(例如,马达2756和相
关部件)以及一次性部分(例如,与人体组织或流体接触的部件)。在一些实施方案中,手持部2760包括被构造为与耐用的后壳体部耦合的一次性前壳体部。两个壳体部可以使用各种机构(诸如螺纹、弹簧锁等)耦合在一起。耦合机构可以包括释放按钮,该释放按钮被构造成使两个壳体部脱离。
205.如上所述,可以通过诸如用活塞硬挡块限制活塞沿向后方向的行进来调节脉动真空的量。在一些实施方案中,一次性部分与可重复使用部分的相对关系是可调节的,并且转而可以限制活塞可以向后行进的距离。例如,可重复使用的部分被定位到一次性部分上的位置越远,由于活塞硬挡块而导致的活塞行进越有限。活塞挡块的位置可以可调节,以提供多种可选的真空设置。在某些手术或手术的某些步骤中,与其他手术或该手术的其他步骤相比,可能更期望更高的压力。例如,可以通过将活塞挡块致动到更快的设置来选择更高的压力,使得活塞每个周期可以行进更长的距离并实现最大的真空。在一些实施方案中,可以通过点击调节器来在“高真空”位置与“低真空”位置之间切换活塞挡块位置。在其他实施方案中,定位的活塞挡块可以被“拨入”到在使用期间方便地选择的多个真空设置中的任意一个。
206.在一些实施方案中,真空源可以产生真空的突然上升,这形成真空轮廓,该轮廓在施加脉冲真空期间使角膜和眼睛有效地上下“弹跳”。例如,当活塞2799向后弹起时,它们可能产生真空的突然上升,这形成类似“锯齿”的真空轮廓(即,吸出-暂停
–
吸出)。限制活塞2799在其各自的泵室2705内的向后行进可以减少每次活塞向后弹起时产生的吸出冲击或震动的量。从而,活塞极限限制了每个活塞行进产生的最大吸力,这减小了这种突然吸出对眼睛可能具有的影响。随着活塞2799的每次向后行进产生的抽吸力可以大于500mmhg,直至约700mmhg。
207.在一些实施方案中,通过并入如下特征来限制装置实现最大真空:根据是否达到阈值而自动地旁路轴2761。例如,可以并入放泄阀或其他旁路机构来防止阈值量的真空施加在轴2761的远端开口处和眼睛中。即使到轴2761中的开口被堵塞,打开或关闭吸出的旁路也可以限制可以在眼睛内生成的最大真空量。这种旁路可以防止在阻塞的情况下建立真空,以在消除该阻塞时产生较小的浪涌。旁路机构可以是可调节的或选择性的,使得用户可以选择他们是否想要施加最大真空或小于最大真空的真空的可能性。
208.如上所述,轴2761可包括被构造为将冲洗液递送到工作部位的冲洗套管。图32a至32b例示了具有在轴2761的远端末端区域附近的冲洗套管3127的装置的实施方案。冲洗套管3127可包括一个或多个冲洗开口3125,冲洗开口被构造为在使用期间将流体从冲洗管腔3123递送到眼睛。在一些实施方案中,装置可以并入与冲洗流动路径连通的顺应性元件。顺应性元件可以是被构造为存储来自冲洗管腔3123的一数量的流体的气球或其他可填充元件或储液器。顺应性元件可以填充有冲洗流体,使得在穿过轴2761的远端开口的阻塞和突然的真空冲进的情况下,储存在顺应性元件中的冲洗流体可以可用于填充由增加的真空去除的体积。来自顺应性元件的流体可在负压增加时被拉动到眼睛中,以维持眼睛内压力的平衡,以避免前房的损伤或塌陷。
209.如这里其他地方所述,本文描述的装置的细长构件或轴可由操作地耦合至细长构件的驱动机构相对于装置的手持部振荡。驱动机构可以经由延伸穿过壳体的电缆或由一个或多个电池提供动力。可以经由一个或多个致动器或输入(诸如触发器、按钮、滑块、刻度
盘、小键盘、触摸屏、脚踏开关或这里其他地方所述的其他输入装置)向装置2700施加动力。输入和动力可以定位在装置本身上或远离装置。装置还可以包括响应于用户输入和动力的控制处理器。控制处理器可以控制驱动机构的一个或多个方面。控制处理器可以是可编程的,并且可以接受调节装置的各种可调功能(即,细长构件的行进距离、细长构件的振荡频率、伸出速度曲线、缩回速度曲线、最大伸出速度、细长构件的最大缩回速度、真空度等)的用户输入。控制处理器可以由装置本身上的输入来编程,或者可以诸如由具有输入的外部计算装置来远程编程。控制处理器可以根据存储在存储器中的程序指令操作。
210.可以通过使用运动控制器、电子速度控制器等来完成驱动机构的控制。用于运动控制器的致动器或输入可以是发起切割和/或真空的开/关种类的输入。另选地,用于运动控制器的输入可以是多向输入,该输入例如根据输入的致动程度使马达2756更快旋转(例如,进一步向下按压按钮,拨刻度盘,轻巧触摸板上显示的按键,或在相对于壳体的方向上滑动更远的距离)。控制器可以被编程(例如,远程地或在装置本身上)为在致动输入时具有最小和/或最大速度,如将在下面更详细地描述的。
211.图33a至33c例示了被构造为控制装置的各种功能的、装置上的多向输入3125(诸如触发器)的实施方案的不同配置。输入3125可以具有多个位置,这些位置被配置为打开或关闭(或增加或减少)装置的一个或多个功能。例如,输入3125可以具有如图33a所示的静止位置。用户可以将输入3125致动为移动到第一致动位置(例如,部分按下位置),该第一致动位置被配置为启动或增加装置的至少一个或多个功能(参见图33b)。第一致动位置可以打开真空和远端轴2761的振荡这两者,从而提供真空加切割功能。输入3125可具有第二致动位置(例如,完全按下位置),该第二致动位置被配置为暂停或减小装置的一个或多个功能(参见图33c)。例如,处于第二致动位置的输入3125可以在继续穿过轴2761的真空的同时暂停轴2761的振荡,从而提供仅真空的功能。
212.这里考虑输入的各种配置。作为示例配置,输入3125可以是机械的,使得随着输入3125被致动到多个位置之一,输入3125耦合到沿着装置的纵向轴线可移动的杆3127(图33b至33c所示)。例如,当输入3125从静止位置移动到第一致动位置时,输入3125可以使杆3127移动,使得杆3127的近端延伸第一距离到装置的手持部的近端部(图33b)。当输入3125从第一致动位置移动到第二致动位置时,输入3125可使杆3127移动,使得杆3127的近端延伸第二距离到装置的手持部的近端部中(图33c)。杆3127的近端可与装置的手持部内的元件相互作用,该元件被构造为例如有电位计来改变被构造为使细长轴2761振荡的马达的速度。
213.杆3127除了改变振荡速度之外还可以完全防止轴2761的移动。如上所述,杆3127的移动可以使其通过与电位计或其他特征相互作用来改变马达的速度。杆3127在近端方向p上的移动还可以使轴2761在近端方向上移动,从而防止轴2761的近端与被构造为使轴2761振荡的驱动机构(例如,凸轮齿)相互作用。图34a至34c对应于图33a至33c和图35a至35c。每个图均例示了致动器3125和杆3127的移动如何影响轴2761相对于凸轮机构的移动。在图34a所示的致动器3125的静止状态下,杆3127处于最远端位置并且远离轴2761的近端花键3162移动。在正常操作下并且如这里其他地方所述,旋转凸轮3169可以持续旋转。随着它旋转,旋转的凸轮3169使凸轮从动件3190的齿3132啮合并有效地向后拉动切割器花键3162,直到其到达台阶3933为止(参见图35a至35c),此时,弹簧3135的力向前或沿远端方向d推动轴2761。随着凸轮3169旋转,轴2761前后振荡。在致动器3125完全致动时,杆3127沿近
端方向p进一步移动,直到杆3127的特征3163与轴2761的花键3162啮合为止(参见图34c和35c)。杆3127向近端拉动花键。移动使凸轮3169与凸轮从动件3190脱离,这防止齿3132啮合,使得轴2761不发生运动。
214.在一些实施方案中,装置2700是多合一装置,其中,到器械的唯一链路可以是用于电力。由此,多合一装置可以没有任何脚踏板或其他用于控制的连杆机构。
215.装置2700也可以由电池供电。电池可以被并入在壳体的区域内,或者在内部或者耦合到壳体的区域,例如在模块化的可去除的电池组内。电池可以具有不同的化学组成或特性。比如,电池可包括铅酸、镍镉、镍金属氢化物、氧化银、氧化汞、锂离子、锂离子聚合物或其他锂化学组成。装置还可以包括使用直流电源端口、感应、太阳能电池等进行充电的可充电电池。这里还将考虑本领域已知的用于为手术室中使用的医疗装置供电的电源系统。在一些实施方案中,不是将电池组安装在手柄上或手柄中(这可能增加手柄的尺寸),而是可以将电池组安装在其他位置,诸如在手术期间紧握器械的用户手臂或手臂的手腕上。短电缆连接器可以将已安装的电池组连接回装置,使得在使用期间只有该链路从装置2700的手柄延伸。由此,不需要将脚踏板或其他拴绳连接链接到装置2700。这可以为用户提供更多的便携性、灵活性以及移动自由度,而不必担心在使用期间钩住电缆或其他拴绳。
216.如上所述,本文描述的装置可包括轴,该轴被构造为以微创方式插入到眼睛中,以切割、抽吸和/或注入眼睛中的材料。轴可以是玻璃体切除术式的切割元件,该元件具有中空的细长构件,该细长构件延伸穿过外构件,该外构件的侧开口被构造为捕获和切割组织块。轴还可包括超声乳化(“phaco”)式尖端,该尖端还包括具有或不具有外构件的可移动细长构件。细长构件的振荡移动可以使用各种机构中的任意一种来发生,诸如如这里其他地方所述的旋转凸轮元件。振荡移动可以以避免超声乳化通常对诸如角膜内皮细胞的脆弱眼组织的有害作用的方式来产生。
217.超声乳化可以并入两种主要的作用方法:1)机械抬升锤动和2)空化。在抬升锤动的情况下,尖端的振荡移动高速机械敲击晶状体组织,以将组织破碎成更小小的碎片。空化涉及在尖端的振荡移动期间产生真空和流体气泡。随着超声乳化尖端在流体中缩回,其移动速度如此之快,以至于它空化或产生由缩回尖端产生的真空,这导致随着从流体汲取出气体而形成气泡。这些气泡在非常高的温度(例如3000℃)和非常高的压力(例如10000atm)下内爆。通常认为高温和高压的结合有助于分解晶状体组织碎片。虽然空化在破碎晶状体材料中的作用有待商榷,但空化在白内障手术期间作为超声乳化对周围晶状体组织的有害作用之后的主要驱动器的作用却并非如此。高温、冲击波以及眼睛中自由基的产生与角膜内皮细胞的健康有关。
218.在实施方案中,本文描述的装置中的一个或多个可包括振荡尖端,该振荡尖端被构造为以减小、减弱或防止超声乳化期间的空化问题的方式移动。振荡尖端可以并入在“多合一”类型的装置中,该装置在手柄内具有真空源,以施加脉动真空。另选地,振荡尖端可以并入在与被构造为远程施加脉动真空的另一装置结合使用的装置中。如上所述,本文描述的装置的各种特征和功能可以应用于本领域已知的传统装置和系统,这些传统装置和系统用于在外科手术部位处或附近切割、破碎、乳化或以其他方式冲击组织。例如,本文描述的脉动真空和/或不对称运动曲线可以被并入本领域已知的超声乳化系统和玻璃体切除术系统中。例如,本文描述的特征可以作为超声乳化系统的额外硬件或软件特征并入,超声乳化
系统传统用于引起细长轴在超声频率范围内(例如,高于20000hz)的振荡。
219.图29a至29c例示了具有耦合至远端轴2961的手持部2960的装置2900的实施方案。远端轴2961可包括被构造为相对于手持部2960振荡的细长构件2955。细长构件2955可以但不是必需延伸穿过管状外构件2959(参见图29g至29h)。细长构件2955可包括远端尖端2965。装置2900可包括驱动机构,该驱动机构操作地耦合至远端轴2961并被构造为驱动尖端2965的移动。如将在下面更详细地描述的,驱动机构可以操作地耦合到细长构件并且被构造为使细长构件振荡。当使用时,驱动机构能够使细长构件以缩回速度曲线沿近端方向缩回,并且使细长构件以伸出速度曲线沿远端方向前进。缩回速度曲线可以不同于伸出速度曲线。
220.在一些实施方案中,细长构件2955可以连接至毂2987。毂2987可以在其远端表面上具有与旋转凸轮2969啮合的凸轮表面2992。毂2987的近端表面可以连接至弹簧2935,该弹簧将轮毂2987向远端推动。远端轴2961可包括延伸穿过外构件2959的细长构件2955,但应当理解,外构件2959不是必要的。细长构件2955还连接到诸如矩形块的方位锁定特征2928,该矩形块防止细长构件2955和毂2987旋转。随着旋转凸轮2969旋转,凸轮表面2992使得毂2987向近端移动,这进一步压缩弹簧2935。凸轮表面2992具有台阶2933,该台阶允许毂2987再次在旋转中的特定点向前(即,向远端)下降。此时,弹簧2935快速向前推动毂2987,直到凸轮表面2992再次啮合为止。通过这种机构,细长构件的尖端2965可以以缩回速度曲线缩回,该缩回速度曲线至少部分地是旋转凸轮2969的旋转速度的函数的。旋转凸轮2969的旋转速度可以被控制为使得最大尖端缩回速度保持在“空化阈值速度”以下,以便在眼睛中生成空化气泡。然后,细长构件的尖端2965可以以伸出速度曲线伸出,该伸出速度曲线至少部分地是弹簧2935的力和尖端组件的质量的函数。这样,平均缩回速度可以较慢,即低于空化阈值,但是平均伸出速度可以较快,即接近或高于典型超声乳化尖端的平均缩回速度。由此,可以在大致避免空化的有害作用的同时实现机械抬升锤动的益处。
221.图30a和30c例示了传统超声乳化尖端的典型运动曲线。传统超声乳化尖端具有大致正弦的运动曲线,其中,尖端的平均速度在近端缩回期间与在远端伸出期间大致相同(参见图30a)。相反,本文描述的装置的振荡细长构件具有大体非正弦的运动曲线,其中,缩回速度曲线的平均尖端速度和伸出速度曲线的平均尖端速度可以大致不同,这提供振荡细长构件的整体不对称移动曲线(参见图30b)。另外,传统超声乳化尖端具有缩回速度曲线r的最大尖端速度(v
maxr
),该速度与伸出速度曲线e的最大尖端速度(v
maxe
)大致相同,由此,它们的运动曲线大致重叠(参见图30c)。本文描述的装置的振荡细长构件具有缩回速度曲线r的最大尖端速度(v
maxr
),该最大尖端速度大致低于伸出速度曲线e的最大尖端速度(v
maxe
),由此,它们的运动曲线大致不重叠(参见图30d)。
222.图30c例示了由传统超声乳化机提供的运动曲线,其中,伸出和缩回速度曲线大致相同。例如,具有0.1mm振幅速度的40000hz超声乳化机可以具有近似12.6米/秒的v
max
,其中,时间t1近似为0.0125ms。图30d例示了由本文描述的装置提供的运动曲线。v
maxe
可以与传统超声乳化机的v
maxe
大致相同,但是v
maxr
可以大致更低,使得在时间t2完全缩回完成。由此,装置可以具有较低的v
avg
。
223.图30e至30f例示了这里考虑的额外的不对称运动曲线。随着弹簧力向前迫使细长构件直至其达到其行程极限并在缩回之前回落至零为止,伸出速度e可以线性增加至v
maxe
。
随着细长构件缩回(例如,随着凸轮的旋转,凸轮以大致恒定的速度拉动细长构件),缩回速度r增加到v
maxr
,然后减速至停止。缩回速度曲线r可形成稳定阶段,在此期间,缩回速度大致恒定。缩回阶段在时间t2完成,该时间比完成伸出阶段所耗费的时间t1长。可能包括停留期或伸出与缩回阶段之间的暂停。v
maxe
可以与传统超声乳化机大致相同(例如,在约8至12米/秒之间)。v
maxr
可以比传统超声乳化机低得多(例如,小于约0.02米/秒)。应当理解,伸出和缩回的速度可以变化,并且这里考虑了若干非正弦的尖端运动曲线中的任意一个。在一些实施方案中,v
maxe
可以在大约2米/秒至50米/秒之间,并且v
maxr
可以在大约0.001米/秒至2米/秒之间。
224.在传统超声乳化中,可移动细长构件的速度曲线和移动曲线通常是正弦的。意思是,细长构件的远端尖端的移动以例如对应于向压电晶体供应的电压的正弦波模式振荡。因此,作为移动曲线的导数,远端尖端的速度也以正弦方式振荡。图30g示出了细长构件(底部面板)的远端尖端相对于其伸出和缩回速度曲线(顶部面板)的非正弦移动的实施方案。速度曲线和对应的移动曲线这两者被示出为非正弦的。远端尖端可以在伸出与缩回周期之间具有停留时间。在t0与t1之间,远端尖端可以以可以为正弦波或任意其他曲线的速度曲线向前伸出。在t1处,远端尖端可以暂停t1与t2之间的停留时段。停留时段可以是约0.050毫秒或在约0.001至0.025毫秒之间。在t2处,远端尖端可以以也可遵循正弦曲线的速度曲线缩回。远端尖端的移动类似于正弦波,该正弦波在其最伸出位置处具有停留。
225.非正弦模式(例如,如图30g所示)可以减少空化的可能性,因为停留时间允许在伸出期间由细长构件的移动而位移的眼睛中的流体在细长构件的缩回开始之前返回到零动量状态。在传统的正弦模式期间,细长构件将流体推离远端尖端,然后立即缩回,同时流体仍可以远离远端尖端行进,从而由于流体相对于远端尖端的速度而增加了空化的可能性。如果在远端尖端本身开始缩回的同时,动量从尖端运走眼睛的流体,则流体相对于远端尖端的速度更高。停留时段可以允许被位移的流体在远端尖端开始缩回之前返回到零动量或零速度状态。在该实施方案中,伸出速度曲线和缩回速度曲线可以类似或相同,但是远端尖端的整体速度曲线和移动是非正弦的。这里预期其他实施方案。例如,细长构件可以随着它接近其完全伸出位置而比典型的正弦波模式更加逐渐地减速。随着细长构件缩回,曲线将遵循更对称的路径。考虑任意数量的其他非正弦模式。
226.应当理解,如这里使用的术语“非正弦”可以被定义为不遵循振荡移动的简单正弦波模式的移动或速度曲线。简单的正弦波可以由单个频率、单个相移以及单个振幅来定义。某些复杂的曲线可以通过添加或减去正弦波来生成。然而,这些复杂的曲线也可以视为非正弦的,因为它们的添加或减去不遵循简单的正弦波模式。
227.驱动机构能够使细长构件以缩回速度曲线沿近端方向缩回,并且使细长构件以伸出速度曲线沿远端方向前进,使得缩回速度曲线不同于伸出速度曲线。细长构件的来自缩回速度曲线的平均缩回速度可以低于细长构件的来自伸出速度曲线的平均伸出速度。由此,操作地耦合到细长构件的驱动机构被构造为使细长构件不对称地振荡。伸出速度曲线e可以包括v
maxe
,并且缩回速度曲线r可以包括v
maxr
,其中,v
maxr
小于v
maxe
。细长构件的v
maxr
通常保持低于阈值速度,在该阈值速度下,眼睛中将生成空化气泡。在不将本公开限于任何特定阈值速度的情况下,本领域技术人员将理解,可生成空化气泡的理论缩回速度通常为约5米/秒。由此可见,细长构件的v
maxr
可以维持在大约5米/秒以下。
228.由传统超声乳化系统驱动的细长构件的振荡移动由于移动期间的正常损失(例如,由于摩擦或其他环境因素)而可能具有一定程度的可变性。这种可变性可能影响在缩回和伸出期间实现的平均速度,使得缩回速度曲线和伸出速度曲线不完全相同或不是完美正弦的。然而,在组成部分的移动期间的这种正常可变性不是有意策划或设计发生的(即,控制处理器根据存储在存储器中的程序指令进行操作;或者与控制处理器可操作通信的硬件设计为根据循环阶段实现不同的速度)。由此,不认为移动期间的速度的正常可变性有助于或导致不对称的运动曲线。这里描述的不对称运动曲线是有意识地策划或设计的运动曲线,这些运动曲线旨在在每个循环期间大致可复制,而不仅仅是由于偶然的可变性。
229.如这里其他地方所述,装置的真空源可以被构造为提供不连续负压脉冲。在伸出的至少一部分期间,随着细长构件沿远端方向移动,和/或在缩回的至少一部分期间,随着细长构件沿近端方向移动,可以通过细长构件的管腔汲取抽吸脉冲。图31a例示了对于通过细长构件的管腔的远端末端区域施加的脉动真空的真空分布随时间的实施方案。如这里其他地方所述的,真空源可以包括具有多个活塞的泵,该多个活塞被构造为在其各自的泵室内顺序地移动,这产生被减少真空的时段点缀的增加真空的时段。在一些实施方案中,真空的增加可以比真空的减少更快地发生,这提供真空分布。通过远端轴的管腔施加的脉动真空分布可以与执行切割的细长构件的运动曲线同步,使得在特定移动阶段期间施加负压时段的至少一部分。图31b至31c示出了细长构件相对于通过细长构件施加的负压时段(阴影线)的移动(实线)。负压(即真空脉冲)的时段可以发生在细长构件的向前行程或远端伸出e的至少一部分期间、远端伸出e之后和近端缩回r之前的停留时间期间、和/或细长构件的近端缩回r的至少一部分期间。例如,图31b示出了第一真空压力脉冲发生在细长构件的伸出e以及在伸出e之后和缩回r之前的停留时间期间。第一真空压力脉冲在缩回r阶段期间结束,并且第二真空脉冲开始并在相同缩回阶段结束之前结束。图31c示出了另一实施方案,其中,第一真空压力脉冲在细长构件的伸出e期间开始,并且在细长构件的缩回r阶段期间以及细长构件的第二伸出e期间维持。图31b示出了具有尖端移动频率的大约2倍的真空脉冲,并且图31c示出了具有真空脉冲频率的大约2倍的尖端移动。图31b和图31c这两者示出了真空脉冲发生在伸出e和缩回r的一部分期间。应当理解,这里考虑了任意数量的各种相对频率,并且这些是相对速度曲线和真空分布的一些示例的例示。
230.尖端2965的位移或行进距离可以变化,但是通常大于本领域已知的超声乳化尖端。典型的超声乳化尖端具有在约0.1mm的量级上的尖端位移,并且以约20至40khz的频率移动。本文描述的尖端2965可具有更大的位移距离和更低的频率。例如,尖端2965实现的位移在大约10至2000hz的频率下可以在大约0.05mm至1.0mm之间。这样,本文描述的装置可以不是超声的,并且可以不在白内障手术期间在眼睛中生成与有害作用关联的热量。在一些实施方案中,弹簧2935向前推动尖端2965。更长的行程距离可以允许尖端在与眼睛组织碰撞时实现更高的最终速度v
maxe
。
231.在一些实施方案中,装置2900可具有在细长构件2955上延伸的外管2959(参见图29g至29h)。内外构件2955、2959的相对长度可以使得当细长构件2955沿远端方向完全伸出(这形成完全伸出构造)时,细长构件的远端尖端2965伸出超出外构件2959的远端。处于完全伸出构造的细长构件2955的远端尖端被定位在外构件2959的远端开口的远端。外构件2959的远端开口与处于完全伸出构造的细长构件2955的远端尖端之间的距离限定伸出距
离d。当细长构件2955处于完全缩回位置时,细长构件2955完全缩回到外构件2959中。细长构件2955的远端尖端相对于外构件2959从完全缩回构造移动到完全伸出构造的距离限定了行进距离。伸出距离可以小于行进距离,例如,是行进距离的一半。在一些构造中,行进距离在大约0.05mm至大约1.0mm之间,并且伸出距离在大约0.1mm至大约0.5mm之间。因此,细长构件2955的远端尖端2965仅对于其运动曲线的一部分暴露于晶状体材料。例如,细长构件2955可以从其完全缩回位置向前伸出约0.5mm,并且该行程的近似一半可以在外构件2959内,使得仅细长构件2955的行程的最后0.25mm伸出超过外构件2959。这样,细长构件2955可在其撞击晶状体材料之前加速至高速。细长构件2955完全缩回到外构件2959中提供的另外益处在于:随着细长构件2955缩回到外构件2959中,它可以帮助将晶状体材料与细长构件2955的远端尖端2965分离,这防止晶状体材料“棒棒糖修剪”(lollipopping)到细长构件2955的远端尖端2965上。
232.操作地耦合到细长构件2955的、被构造为引起细长构件2955的振荡移动的驱动机构可以如这里其他地方所述的变化。在一些实施方案中,细长构件2955可以由并入弹簧元件2935的驱动机构来驱动。然而,这里考虑了其他能量形态,这些能量形态用于以这里讨论的不对称或非正弦方式来驱动细长构件2955。例如,如下所述,细长构件2955可以被机械地、液压地、气动地、电磁地或经由压电驱动系统来驱动。本领域技术人员将理解实现各种驱动机构以便如本文描述地移动细长构件所必需的结构。
233.在一些实施方案中,装置的驱动机构可以并入压电元件,该压电元件被构造为诸如通过前后驱动毂2987来驱动细长构件。压电元件可以通过减小或增大尺寸来响应电压的变化。连接到压电元件的高频电压可以生成尖端2965的运动曲线,该运动曲线与所供电压的频率匹配。发送到压电元件的电压信号的形状可以是大体非正弦的,因此,如这里中其他地方所述的,尖端2965以大体非正弦模式移动。电压可具有使压电元件收缩的波形,其收缩速度小于其允许压电元件扩张的速度。这使尖端2965在缩回行程上比在伸出行程上更慢地移动。可以基于提供给压电元件的电压波形来命令任意数量的运动曲线。例如,可以将两个或更多个重叠的电压正弦波形提供给压电元件,该压电元件产生干涉效果,使得产生非正弦波形。
234.在更进一步的实施方案中,装置中并入了机构和形态的组合,以用非正弦运动曲线来驱动细长构件。例如,电磁线圈可被构造为在通过线圈施加电流的情况下使铁素体铁心向前移动。铁心可以被构造为由电磁线圈向前驱动,但是然后通过压缩弹簧的力向后(即向近端)缩回。因此,随着通过线圈增加电流,铁心被向前驱动。随着电流减小,铁心向后缩回。这样,铁心可以连接到切割器构件,使得可以由线圈中的电流的突然增加来快速地执行向前的伸出,但是由于压缩弹簧的力,缩回可能更慢。
235.本文描述的装置可以使用一个或多个输入(包括触发器、按钮、滑块、刻度盘、小键盘、开关、触摸屏、脚踏板或可以缩回、按压、挤压、滑动、轻敲或以其他方式致动的其他输入)来致动,以启动、修改或以其他方式引起通过细长构件产生的流体的振荡、抽吸和/或注入。致动器可以并入到装置本身中,或者可以远离装置,但是与装置有线或无线通信,诸如在具有自己输入的外部计算装置上。如这里其他地方所述,用户可以将具有一个或多个输入的装置推动到一个位置,该位置使得驱动机构在更多地致动触发器时增加细长构件的振荡频率(例如,通过增加马达的旋转)。
236.还可以对本文描述的装置编程,以在致动输入时提供对特定动作的限制。例如,驱动机构可被编程为在输入被致动时具有最小和/或最大速度,或者,在流体注入和抽吸的情况下,装置可被编程为在致动输入时具有最小和/或最大流体压力。由此,本文描述的装置可以使用用户可调节的输入以及由在致动输入时影响装置的一个或多个方面的预编程指令来编程。
237.本文描述的装置可以包括与驱动机构的一个或多个部件、真空源或包括外部计算装置的装置的其他部件操作地通信的控制器。控制器可以包括至少一个处理器和存储装置。存储器可以被配置为接收和存储用户输入数据。存储器可以是能够存储数据并将该数据传送到装置的一个或多个其他部件(诸如处理器)的任意类型的存储器。存储器可以是闪存、sram、rom、dram、ram、eprom、动态储存器等中的一个或多个。存储器可以被配置为存储与装置的预期用途有关的一个或多个用户定义的配置文件。存储器可以被配置为存储用户信息、使用历史、进行的测量等。
238.本文描述的装置可以包括与装置的一个或多个部件(诸如控制器)操作地通信的通信模块。通信模块可以与具有通信模块的外部计算装置通信。装置的通信模块与外部计算装置之间的连接可以包括有线通信端口,诸如rs22连接、usb、火线连接、专有连接或被配置为接收和/或向外部计算装置发送信息的任意其他合适类型的硬接线连接。通信模块还可以包括无线通信端口,使得可以经由无线链路在装置与外部计算装置之间提供信息,例如,以在外部计算装置上实时显示有关装置操作的信息,和/或控制装置的编程。例如,用户可以在外部计算装置上对装置的马达2756的速度曲线编程。可以使用外部计算装置对装置执行各种调节中的任意一个和编程。无线连接可以使用任意合适的无线系统,诸如蓝牙、wi-fi、射频、zigbee通信协议、红外或蜂窝电话系统,并且还可以采用编码或身份验证来验证接收到的信息的来源。无线连接也可以是各种专有无线连接协议中的任意一种。装置与之通信的外部计算装置可以变化,包括但不限于台式计算机、膝上型计算机、平板计算机、智能手机或能够通信和接收用户输入的其他装置。
239.处理器、存储器、存储装置、输入/输出装置可以经由系统总线互连。处理器可以能够处理用于在系统内执行的指令。这种执行的指令可以实现本文描述的与装置的使用有关的一个或多个过程。控制器的处理器可以是单线程处理器或多线程处理器。控制器的处理器可以能够处理存储在存储器和/或存储装置中的指令,以向用户提供有关装置操作的信息输出。
240.用户可以对装置的一个或多个方面编程。例如,用户可以将驱动机构的一个或多个方面编程为控制细长构件的运动,包括但不限于细长构件的行进距离、细长构件的振荡频率、最大伸出速度(v
maxe
)、最小伸出速度(v
mine
)、最大缩回速度(v
maxr
)、最小缩回速度(v
minr
)、平均伸出速度(v
avge
)、平均缩回速度(v
avgr
)或运动曲线的任意其他方面。在一些实施方案中,细长构件随着每个周期移动的距离可以被可调节地编程,使得其振荡的振幅在大约0.5hz至大约5000hz的范围内或者在大约10hz至大约2000hz的范围内可选择。振荡的振幅可以小于超声,例如,小于约20000hz或在超声范围内(例如,约20000hz至约120000hz,直到千兆赫范围)。
241.用户还可以对真空源的多个方面之一编程,以控制施加在细长构件的远端末端区域处的真空,包括但不限于抽吸流量、最小真空压力、最大真空压力、真空脉冲频率或真空
分布的任意其他方面。在一些实施方案中,抽吸流量可以在大约5至100ml/min之间的范围内可调节地编程。
242.可以使用本文描述的装置,使得一个或多个方面根据用户的手动输入来手动控制和/或调节。本文描述的装置可以被编程为控制一个或多个方面。控制器可以包括能够被编程为调节或提供对装置的一个或多个方面的限制的软件。由此,由控制器运行的软件可以提供装置的某些方面,而在使用期间没有任何用户输入。在实施方案中,调节或编程可以经由由软件控制的控制器进行,该软件在装置内或在外部计算机装置上。用户可以经由外部计算装置远程编程控制器,外部计算装置经由无线连接(诸如蓝牙)与装置通信。
243.还应当理解,具有或不具有本文描述的真空脉冲的不对称运动曲线可以应用于通常用于白内障手术和玻璃体切除术的已知超声乳化系统。被配置为以超声频率移动细长构件以去除晶状体材料的传统超声乳化系统可以经由软件或硬件(例如由提供引起不对称运动的特定电压的电路)来实现如本文描述的一个或多个运动曲线和/或真空曲线。由此,本文描述的不对称运动曲线和脉冲真空分布可以应用于被构造为以超声频率振荡的机器。
244.本文描述的主题的方面可以在数字电子电路、集成电路、专门设计的asic(专用集成电路)、计算机硬件、固件、软件和/或其组合中实现。这些各种实施方案可以包括可在可编程系统上执行和/或解释的一个或更多个计算机程序中的实施方案,可编程系统包括被耦合为从存储系统、至少一个输入装置以及至少一个输出装置接收信号、数据以及指令和向其发送信号、数据以及指令的专用或通用的至少一个可编程处理器。
245.这些计算机程序(还被称为程序、软件、软件应用或代码)包括用于可编程处理器的机器指令,并且可以用高级规程和/或面向对象的编程语言和/或用汇编/机器语言来实现。如这里使用的,术语“机器可读介质”指用于向可编程处理器(包括接收机器指令作为机器可读信号的机器可读介质)提供机器指令和/或数据的任意计算机程序产品、设备和/或装置(例如磁盘、光盘、存储器、可编程逻辑装置(pld)。术语“机器可读信号”指用于向可编程处理器提供机器指令和/或数据的任意信号。
246.在各种实施方案中,参照附图进行描述。然而,特定实施方案可以在没有这些具体细节中的一个或多个的情况下或结合其他已知方法和构造来实践。在描述中,为了提供实施方案的彻底理解,阐述了大量具体细节,诸如具体构造、尺寸以及过程。在其他情况下,为了不使描述不必要地模糊,未特别详细地描述公知过程和制造技术。贯穿本说明书对“一个实施方式”、“实施方式”、“一个实施方案”、“实施方案”等的参考意味着在至少一个实施方式或实施方案中包括所述的特定特征、结构、构造或特性。由此,短语“一个实施方式”、“实施方式”、“一个实施方案”、“实施方案”等在贯穿本说明书的各种地方的出现不是必须指相同的实施方式或实施方案。此外,特定特征、结构、构造或特性可以以任意合适的方式组合在一个或多个实施方案中。
247.相对术语贯穿描述的使用可以指示相对位置或方向。例如,“远端”可以指示远离参考点的第一方向。类似地,“近端”可以指示与第一方向相反的第二方向上的位置。然而,这种术语被提供为创建相对参照系,并且不旨在将锚固递送系统的使用或方位限于在各种实施方案中描述的具体构造。
248.虽然该说明书包含许多细节,但这些细节不应被解释为是对要求保护或可以要求保护的范围的限制,相反应被解释为是特定于特定实施方式的特征的描述。在单独实施方
式的背景下在该说明书中描述的特定特征还可以在单个实施方式中组合实施。相反,在单个实施方式的背景下描述的各种特征还可以单独在多个实施方式中或以任意合适的子组合实施。而且,虽然特征在上面可以被描述为以特定组合起作用且甚至初始照此要求保护,但来自所要求保护组合的一个或多个特征在一些情况下可以从组合切除,并且所要求保护的组合可以致力于子组合或子组合的变体。类似地,虽然以特定顺序在附图中描绘操作,但这不应被理解为为了实现期望的结果而需要这种操作以所示出的特定顺序或以相继次序来执行或者执行所有所例示的操作。仅公开了一些示例和实施方案。可以基于所公开的内容进行所述示例和实施方案以及其他实施方案的变更、修改以及增强。
249.在以上描述和权利要求中,诸如“的至少一个”或“的一个或更多个”的短语可以出现,后面是元件或特征的连接列表。术语“和/或”也可以出现在两个或多个元件或特征的列表中。除非另外由使用短语的语境含蓄或明确地否定,否则这种短语旨在意指所列元件或特征中独立的任意一个或与其他所列元件或特征中的任意一个组合的、所列元件或特征的任意一个。例如,短语“a和b中的至少一个”、“a和b中的一个或多个”以及“a和/或b”各旨在意指“a独自、b独自或a和b一起”。类似的解释也旨在用于包括三项或多项的列表。例如,短语“a、b以及c中的至少一个”、“a、b以及c中的一个或多个”以及“a、b和/或c”各旨在意指“a独自、b独自、c独自、a和b一起、a和c一起、b和c一起、或a和b和c一起”。
250.上面和权利要求中的术语“基于”的使用旨在意指“至少部分基于”,使得未列举的特征或元件也是可允许的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1