一种基于电致动聚合物的微型末端缝合器及其缝合方法
1.本发明涉及一种医用操作器械,更具体涉及一种基于电致动聚合物的微型末端缝合器及其缝合方法。
背景技术:
2.气道壁瘘患者由于各种原因造成气道壁的完整性受到破坏导致出现瘘口。气管食管瘘是由于各种良恶性因素导致气道与邻近食管破溃形成病理性交通,最常见的部位为食管中段与左主支气管之间。气管食管瘘的危害是病死率高,生存率低,生活质量差。
3.对于继发性气道-消化道瘘患者的治疗有以下方法:第一种是内科保守治疗方法,所括使用抗生素控制肺部感染及通过化痰,适当止咳等进行对症治疗;但是这种方法治标不治本。第二种是支架介入治疗,适用人群是不适合手术的继发性气道-消化道瘘的患者,介入治疗目前最常用的是气道和/或消化道支架的置入和镜下药物注射、烧灼、金属夹等,支架是通过物理学方法可以遮盖瘘口,但置入支架时易出现定位准确性欠佳等问题;另一种治疗方法采用手术进行瘘口缝合,尽管该方法在原理上说更容易彻底解决腔道瘘口问题,但由于受到技术和内科操作空间的限制,目前发展仍然缓慢。
4.现有专利申请号为202111003066.2的专利文献公开了一种电致动聚合物的手术缝合换针设备,涉及换针设备技术领域,该发明包括位于壳体内的旋转驱动装置、直线驱动装置和缝合针装置;该发明还提供采用上述换针设备的换针方法。但其并不适用于气道壁瘘患者的手术进行人体内部腔道缝合。
5.为此,本发明提出一种微型缝合器,提供一种有限腔体空间的自动缝合方案。
技术实现要素:
6.本发明所要解决的技术问题在于,如何提供一种适用于气道壁瘘及气管食管瘘患者手术的微型缝合器。
7.本发明通过以下技术手段实现解决上述技术问题的:一种基于电致动聚合物的微型末端缝合器,包括位姿调整模块、缝合模块、缝合针、控制电路模块,所述位姿调整模块、缝合模块均与控制电路模块电性连接,所述控制电路模块位于位姿调整模块内,所述缝合针位于缝合模块内腔,且缝合模块设有出针口,所述缝合模块与位姿调整模块转动配合。
8.所述缝合模块包括驱动单元,所述驱动单元的输出端与缝合针传动连接,所述缝合模块内开设有与缝合针相适配的环形轨道,所述驱动单元驱动缝合针沿环形轨道转动并可伸出出针口。
9.通过位姿调整模块和缝合模块可对缝合针的位置进行调节,可针对气管食管瘘的不同位置来调整缝合模块的角度,从而完成缝合,通过驱动单元驱动缝合针沿环形轨道转动可完成对内科气管食管瘘口的缝合。
10.作为优选的技术方案,所述位姿调整模块包括球形壳体、小齿轮、第一微型电机,所述第一微型电机固定设于球形壳体尾端,所述第一微型电机的输出端传动连接有小齿
轮,并与缝合模块传动配合,所述第一微型电机驱动缝合模块沿小齿轮布置方向转动,通过球形壳体的设置,对气管食管友好,并不会对气管食管造成二次伤害。
11.作为优选的技术方案,所述缝合模块还包括球形支架、夹针单元、绕线处理装置,所述驱动单元固定设于球形支架内,所述球形壳体与球形支架出针口处均设有相同的平面,且其球面球心重合,所述驱动单元的输出端与夹针单元传动连接,所述夹针单元用于固定缝合针,所述缝合针一端与绕线处理装置中缝合线的自由端固定连接,所述球形支架周面固定有与小齿轮啮合配合的传动齿轮,通过夹针单元的设置可对缝合针进行固定,并配合驱动单元完成对气管食管瘘的连续缝合。
12.作为优选的技术方案,所述夹针单元包括转动杆、第一ipmc致动器、弹簧、锥形柱塞、夹针基体,所述转动杆与夹针基体固定连接且与驱动单元的输出端传动配合,所述夹针基体上开设有锥形槽,所述锥形槽内壁通过弹簧弹性连接有锥形柱塞,所述锥形槽内固定连接有与弹簧穿插设置的第一ipmc致动器,所述第一ipmc致动器与控制电路模块电性连接,通过第一ipmc致动器可有效完成特定的驱动任务,对于第一ipmc致动器通电可使得第一ipmc致动器弯曲,压缩弹簧,使锥形柱塞对缝合针的作用力减小,缝合针从夹针单元中卸载。
13.作为优选的技术方案,所述驱动单元为第二微型电机,所述第二微型电机通过减速齿轮组与转动杆传动配合。
14.作为优选的技术方案,所述减速齿轮组包括第一小齿轮、第一大齿轮、第二小齿轮、第二大齿轮、第一固定板、第二固定板,所述第一固定板、第二固定板由下至上依次固定设于球形支架内腔,所述第一小齿轮与第二微型电机的输出端固定,所述第一固定板上转动连接有第一转轴,所述第一转轴位于第一固定板底部的一端固定有与第一小齿轮啮合的第一大齿轮,所述第一转轴位于第一固定板顶部的一端固定有第二小齿轮,所述第二固定板上转动连接有第二转轴,所述第二转轴位于第二固定板底部的一端固定有第二大齿轮,所述第二小齿轮与第二大齿轮啮合,所述第二转轴位于第二固定板顶部的一端与转动杆固定连接,通过减速齿轮组可完成传动和减速的功能。
15.作为优选的技术方案,所述转动杆顶部设有顶线装置,所述顶线装置包括固定设于转动杆顶部的固定圆板,所述固定圆板顶部通过第二ipmc致动器滑动连接有活动圆板,通过第二ipmc致动器可将缝合线顶起,防止夹针单元返回时与缝合线发生干涉。
16.作为优选的技术方案,所述绕线处理装置包括绕线筒、圆盘、卡环、限位顶板,所述球形支架内固定连接有卡环和限位顶板,所述限位顶板底部通过销轴固定连接有圆盘,所述销轴上转动连接有绕线筒,所述绕线筒卷绕有缝合线,所述缝合线的自由端与缝合针固定连接,通过绕线处理装置可对缝合线进行收纳。
17.作为优选的技术方案,所述第二固定板顶部固定连接有两个限位块,所述限位块位于出针口内侧。
18.一种采用上述微型末端缝合器的使用方法,包括以下步骤:
19.s1:于术前将指定长度的缝合线束卷绕至绕线处理装置上,并使缝合线与缝合针尾部进行固定;
20.s2:将微型末端缝合器安装在内窥镜末端,将微型末端缝合器定位至气管食管瘘处;
21.s3:通过驱动单元驱动缝合针沿环形轨道正向转动半周,使得缝合针从出针口的一侧伸出,插入机体同时缝合针针头进入出针口另一侧,完成一次插针动作;
22.s4:通过控制电路模块控制夹针单元松开缝合针,并在驱动单元的驱动下转动至出针口另一侧的缝合针针头处,并重新夹紧缝合针,驱动单元带动夹针单元进行一次拔针动作,使得缝合线穿过机体,完成一次缝合动作;
23.s5:完成一次插针和拔针动作后,缝合针完全位于球形支架内部,在进行下次缝合动作前要调整夹针单元的位置,使夹针单元位于缝合针的尾端并夹紧。
24.s6:根据创缘大小多次重复s3、s4、s5,直至完成缝合。
25.本发明的优点在于:
26.(1)本发明中,通过位姿调整模块和缝合模块可对缝合针的位置进行调节,可针对气管食管瘘的不同位置来调整缝合模块的角度,从而完成缝合,通过驱动单元驱动缝合针沿环形轨道转动可完成对内科气管食管瘘口的缝合。
27.(2)本发明中,通过夹针单元的设置可对缝合针进行固定和卸载,并配合驱动单元完成对气管食管瘘的连续缝合。
28.(3)本发明中,通过第一ipmc致动器可有效完成特定的驱动任务,对于第一ipmc致动器通电可使得第一ipmc致动器弯曲,压缩弹簧,使锥形柱塞对缝合针的作用力减小,缝合针从夹针单元卸载,同时还可减小整体装置的体积和重量。
附图说明
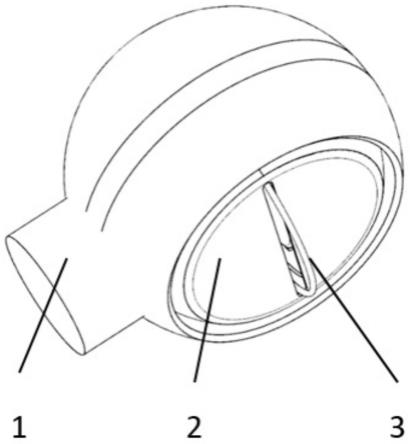
29.图1为本发明实施例提供的一种基于电致动聚合物的微型末端缝合器的结构示意图;
30.图2为本发明实施例提供的一种基于电致动聚合物的微型末端缝合器的结构示意图;
31.图3为本发明实施例提供的一种基于电致动聚合物的微型末端缝合器的结构示意图;
32.图4为本发明实施例提供的一种基于电致动聚合物的微型末端缝合器的结构示意图;
33.图5为本发明实施例提供的一种基于电致动聚合物的微型末端缝合器的结构示意图;
34.图6为本发明实施例提供的一种基于电致动聚合物的微型末端缝合器的结构示意图;
35.图7为本发明实施例提供的一种基于电致动聚合物的微型末端缝合器的结构示意图;
36.图8为本发明实施例提供的一种基于电致动聚合物的微型末端缝合器的结构示意图;
37.图9为本发明实施例提供的一种基于电致动聚合物的微型末端缝合器的结构示意图;
38.附图标号:1、位姿调整模块;11、球形壳体;12、小齿轮;13、第一微型电机;2、缝合模块;21、绕线处理装置;211、绕线筒;212、圆盘;213、卡环;214、限位顶板;22、顶线装置;
221、活动圆板;222、第二ipmc致动器;223、固定圆板;23、减速齿轮组;231、第一小齿轮;232、第一大齿轮;233、第二小齿轮;234、第二大齿轮;235、第一固定板;236、第二固定板;24、第二微型电机;25、夹针单元;251、转动杆;252、第一ipmc致动器;253、弹簧;254、锥形柱塞;255、夹针基体;26、球形支架;27、传动齿轮;28、限位块;3、缝合针;4、控制电路模块。
具体实施方式
39.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.参考图1,一种基于电致动聚合物的微型末端缝合器,包括位姿调整模块1、缝合模块2、缝合针3、控制电路模块4,位姿调整模块1、缝合模块2均与控制电路模块4电性连接,参阅图2,控制电路模块4固定设于位姿调整模块1内,缝合针3位于缝合模块2内腔,且缝合模块2设有出针口,缝合模块2与位姿调整模块1转动配合。
41.参阅图2,位姿调整模块1包括球形壳体11、小齿轮12、装配减速器的第一微型电机13,第一微型电机13固定设于球形壳体11尾端,第一微型电机13的输出端传动连接有小齿轮12,并与缝合模块2传动配合,第一微型电机13驱动缝合模块2沿小齿轮12布置方向转动。
42.参阅图3、图4和图5,缝合模块2包括绕线处理装置21、顶线装置22、减速齿轮组23、第二微型电机24、夹针单元25、球形支架26、传动齿轮27、限位块28,绕线处理装置21、顶线装置22、减速齿轮组23、第二微型电机24、夹针单元25、限位块28均位于球形支架26内,传动齿轮27固定连接在球形支架26外壁,传动齿轮27与小齿轮12啮合传动,球形支架26通过转轴转动连接在球形壳体11内腔,球形支架26与球形壳体11具有一定的间隙,可便于球形支架26转动,球形壳体11与球形支架26出针口处均设有相同的平面结构,且其球面球心重合,第二微型电机24固定连接在球形支架26底部内壁,第二微型电机24的输出端通过减速齿轮组23与夹针单元25传动连接,夹针单元25用于固定缝合针3,顶线装置22固定设于夹针单元25顶部,绕线处理装置21固定设于球形支架26顶部内壁,且位于顶线装置22顶部,限位块28固定设于减速齿轮组23顶部。
43.参阅图5,减速齿轮组23包括第一小齿轮231、第一大齿轮232、第二小齿轮233、第二大齿轮234、第一固定板235、第二固定板236,第一固定板235、第二固定板236由下至上依次固定设于球形支架26内腔,第一固定板235、第二固定板236为平行设置,第一小齿轮231与第二微型电机24的输出端固定连接,第一固定板235上转动连接有第一转轴,第一转轴位于第一固定板235底部的一端固定有与第一小齿轮231啮合的第一大齿轮232,第一转轴位于第一固定板235顶部的固定有第二小齿轮233,第二固定板236上转动连接有第二转轴,第二转轴位于第二固定板236底部的一端固定有第二大齿轮234,第二小齿轮233与第二大齿轮234啮合,第二转轴位于第二固定板236顶部的一端与转动杆251固定连接,第一小齿轮231和第二大齿轮234中心线同轴,第二固定板236顶部固定连接有两个限位块28,两个限位块28对称分布在出针口的两侧,限位块28可对夹针单元25的转动范围进行限制。
44.参阅图6和图7,夹针单元25包括转动杆251、第一ipmc致动器252、弹簧253、锥形柱塞254、夹针基体255,转动杆251与夹针基体255固定连接且与驱动单元的输出端传动配合,
夹针基体255上开设有两个关于夹针基体255对称分布的锥形槽,沿锥形槽轴向的内壁通过弹簧253弹性连接有锥形柱塞254,锥形槽内固定连接有与弹簧253穿插设置的第一ipmc致动器252,第一ipmc致动器252与控制电路模块4电性连接,夹针基体255上开设有与缝合针3相适配的环形槽,本实施例中,采用的缝合针3为二分之一圆弧针,环形槽为贯通型槽,常态下,由于弹簧253的弹性作用,会通过锥形柱塞254将缝合针3顶紧固定在环形槽内,第一ipmc致动器252在受到通电激励后会发生弯曲,对弹簧253进行反向压缩,进而减小弹簧253和锥形柱塞254对缝合针3的作用力,使得缝合针3解除固定,球形支架26内还设有环形导轨(图未标示),环形导轨用于引导和支撑缝合针3,环形导轨的缺口处与出针口相对。
45.参阅图8,顶线装置22包括固定设于转动杆251顶部的固定圆板223、两个第二ipmc致动器222、活动圆板221,固定圆板223顶部通过第二ipmc致动器222滑动连接有活动圆板221,两个第二ipmc致动器222一端与活动圆板221滑动连接,另一端与固定圆板223固定连接,当对第二ipmc致动器222进行通电激励时,第二ipmc致动器222进行弯曲,使活动圆板221上升,顶起缝合线,使得缝合线高于夹针单元25,顺着夹针单元25的环形槽移出,避免夹针单元25返回时与缝合线发生干涉。
46.参阅图9,绕线处理装置21包括绕线筒211、圆盘212、卡环213、限位顶板214,球形支架26内固定连接有卡环213和限位顶板214,限位顶板214底部通过销轴固定连接有圆盘212,销轴上转动连接有绕线筒211,绕线筒211卷绕有缝合线,缝合线的自由端与缝合针3的尾端固定连接,卡环213上开设有两个通孔,用于走线(缝合线)。
47.使用方法包括以下步骤:
48.s1:于术前将指定长度的缝合线束卷绕至绕线处理装置21上,并使缝合线与缝合针3尾部进行固定;将缝合线卷绕至绕线筒211上,缝合线另一端通过圆盘212并穿过卡环213上的通孔,与缝合针3末端固定;
49.s2:将微型末端缝合器安装在内窥镜末端,将微型末端缝合器定位至气管食管瘘处;
50.s3:通过第二微型电机24驱动缝合针3沿环形轨道正向转动半周,使得缝合针3从出针口的一侧伸出,插入机体同时缝合针针头进入出针口另一侧,进行一次插针动作;此时,控制电路模块4未给第一ipmc致动器252进行通电激励,弹簧253与锥形柱塞254对缝合针3处于压紧固定状态,第二微型电机24的输出端通过减速齿轮组23带动夹针单元25的转动杆251正向转动,由于夹针单元25此时对缝合针3处于固定状态,通过限位块28对正转的转动杆251进行限位,因此夹针单元25带动缝合针3正转半周,使得缝合针3穿过机体进入出针口,完成一次插针动作;
51.s4:通过控制电路模块4控制夹针单元25松开缝合针3,并在驱动单元的驱动下转动至缝合针3针头处,并重新夹紧缝合针3,驱动单元带动夹针单元25进行一次拔针动作,使得缝合线穿过机体,完成一次缝合动作;通过控制电路模块4对第一ipmc致动器252进行通电激励,此时第一ipmc致动器252发生弯曲,对弹簧253进行反向压缩,进而减小弹簧253和锥形柱塞254对缝合针3的作用力,使得缝合针3解除固定,此时第二微型电机24通过减速齿轮组23带动夹针单元25的转动杆251反向转动,在另一个限位块28的限位下,使得夹针单元25的两个锥形槽对准二分之一圆弧缝合针3的针头处,并通过对第一ipmc致动器252进行断电,弹簧253伸长对锥形柱塞254作用,从而夹紧缝合针3针尖,此时通过第二微型电机24的
输出端通过减速齿轮组23带动夹针单元25的转动杆251正向转动,使得缝合线穿过机体,完成一整次缝合动作,其中需要说明的是,每次在第二微型电机24通过减速齿轮组23带动夹针单元25的转动杆251反向转动前,均通过控制电路模块4对第二ipmc致动器222进行通电激励,第二ipmc致动器222进行弯曲,使活动圆板221上升,顶起缝合线,使得缝合线高于夹针单元25,顺着夹针单元25的环形槽移出,避免夹针单元25返回时与缝合线发生干涉。
52.s5:完成一次插针和拔针动作后,缝合针3完全位于球形支架26内部,在进行下次缝合动作前要调整夹针单元25的位置,使夹针单元25位于缝合针3的尾端并夹紧。
53.s6:根据创缘大小多次重复s3、s4、s5,直至完成缝合,通过第一微型电机13可调整缝合针3的位置,从而改变下一次缝合的位置,循环以上动作即可完成缝合手术。
54.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1