一种多功能的胃肠外科用导管固定装置的制作方法
1.本发明涉及医疗器械技术领域,具体涉及一种多功能的胃肠外科用导管固定装置。
背景技术:
2.临床的介入治疗,尤其是针对于肠胃外科疾病时,导管导入和插入身体组织来进行治疗的方式是较为普遍的存在,在进行治疗的过程中一般需要将导管进行定位,从而防止导管的位置发生移动,保证治疗效果。
3.其中导管插入患者的治疗位置处需要通过固定装置对导管进行固定,来保持导管的相对稳定性,主要是对导管起到一个支撑作用,并且现有的导管固定装置通常是与伤口倾斜角度进行固定导管,那么在病人活动过程中,则会增加身体组织与导管之间的摩擦,从而增加了病人的痛苦,再者,通过胶带进行导管固定的方式,胶带长时间粘接在皮肤上会增加病人的不适感,且固定导管的部位具有松脱的危险,实用性差,而采用固定的机械式固定方式,则容易在病患肢体动作时与导管之间产生拉扯,从而使得导管插入位置失效,需要重新进行导管的插入操作,增加了病患的痛苦。
技术实现要素:
4.本发明的目的在于提供一种多功能的胃肠外科用导管固定装置,以解决现有技术中的导管的固定方式无法避免在病患肢体动作时,导管插入位置和导管之间产生摩擦和对导管产生牵拉导致导管插入位置失效的技术问题。
5.为解决上述技术问题,本发明具体提供下述技术方案:
6.一种多功能的胃肠外科用导管固定装置,包括弹性环体,所述弹性环体上安装有第一导管夹持件和第二导管夹持件,且所述第一导管夹持件和所述第二导管夹持件通过滑动结构滑动安装在所述弹性环体上,所述滑动结构使所述第一导管夹持件或所述第二导管夹持件沿所述弹性环体的周向移动。
7.作为本发明的一种优选方案,所述弹性环体的某一直径的两端位置上均设置有角度调节机构,两个所述角度调节机构同步工作使所述弹性环体以两个所述角度调节机构所在的直径为折线做对折动作。
8.作为本发明的一种优选方案,所述角度调节机构包括固定钳板、竖直安装在所述固定钳板上的升降机构以及对称安装在所述固定钳板内侧表面的两个导向钳板,两个所述导向钳板分布在所述升降机构的两侧,且两个所述导向钳板与所述升降机构连接,所述导向钳板的中间通过转轴安装在所述固定钳板上,两个所述固定钳板在所述升降机构的驱动下绕所述转轴转动,所述导向钳板上设置有用于安装所述弹性环体的开槽。
9.作为本发明的一种优选方案,所述弹性环体包括第一环体和第二环体,且所述第一环体和所述第二环体的轴心在同一直线上,所述第一环体和所述第二环体的周向之间形成有移动轨道,所述滑动结构安装在所述移动轨道中,且所述滑动结构的顶部与所述第二
环体贴合接触,所述滑动结构的底部与所述第一环体贴合接触,所述滑动结构在外力作用下沿所述移动轨道移动。
10.作为本发明的一种优选方案,所述滑动结构包括管体以及套装在所述管体上的滚动轴承,所述第一导管夹持件和所述第二导管夹持件均套装在所述管体内;
11.所述滚动轴承包括外轴承圈和内轴承圈,所述内轴承圈和所述管体固定连接,所述外轴承圈和所述内轴承圈转动套接,所述第一环体的顶部表面和所述第二环体的底部表面设置有与所述外轴承圈相配合的环槽。
12.作为本发明的一种优选方案,所述第一导管夹持件或第二导管夹持件均包括固定环座以及安装在所述固定环座上的分瓣夹板组,所述分瓣夹板组包括环形阵列在所述固定环座上的多个板体,且多个所述板体沿所述固定环座的轴向延伸;
13.所述固定环座与所述分瓣夹板组的连接处螺纹连接有调节螺母,且所述调节螺母的内壁上设置有与每个所述板体相对应的楔形凸起,所述楔形凸起在所述调节螺母的径向上的高度逐渐减小。
14.作为本发明的一种优选方案,所述第一环体和所述第二环体通过铰接结构连接,所述铰接结构位于两个所述角度调节机构中间的所述第二环体上。
15.作为本发明的一种优选方案,所述固定钳板的外侧表面设置有牵拉结构,所述牵拉结构包括多个条状体,多个所述条状体通过长度方向上的侧边依次连接,且位于第一个的所述条状体与所述固定钳板转动连接,位于最后一个的所述条状体的端部设置有卡扣,且所述第一环体上设置有与所述卡扣相配合的扣孔。
16.作为本发明的一种优选方案,还包括支撑杆,以及安装在所述支撑杆上的绕动轴,两个所述角度调节机构的所述固定钳板上均设置有贯穿孔,且两个所述固定钳板通过所述贯穿孔安装在所述绕动轴上。
17.作为本发明的一种优选方案,所述绕动轴包括与所述支撑杆固定连接的筒轴体,以及轴向套装在所述筒轴体内的芯轴体,所述筒轴体和所述芯轴体上均设置有与所述贯穿孔相配合的绕动螺母,所述绕动螺母通过轴承连接所述筒轴体或所述芯轴体。
18.本发明与现有技术相比较具有如下有益效果:
19.本发明能够通过在弹性环体上设置多个用于夹持导管的夹持件,并且每个夹持件都能够在弹性环体上自由的移动,能够实现多个夹持件对导管的多段夹持,同时也能够通过多个夹持件对应夹持多个导管,并且在导管受力的过程中,能够实现在弹性环体上的自由移动,导管在病患肢体动作时,能够适应性的进行动作,减少对导管的牵拉施力。
附图说明
20.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
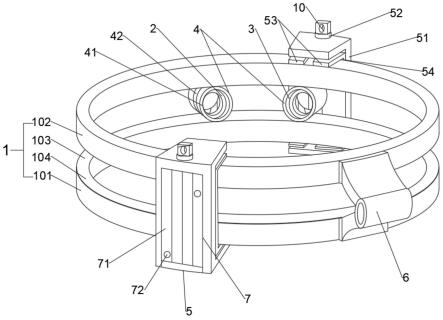
21.图1为本发明实施例提供导管固定装置的结构示意图;
22.图2为本发明实施例提供支撑杆和绕动轴装配的结构示意图;
23.图3为本发明实施例提供滑动结构的部分剖面的结构示意图;
24.图4为本发明实施例提供角度调节机构的结构示意图;
25.图5为本发明实施例提供图4中的弹性环体包括第一环体和第二环体的角度调节机构的结构示意图。
26.图中的标号分别表示如下:
27.1-弹性环体;2-第一导管夹持件;3-第二导管夹持件;4-滑动结构;5-角度调节机构;6-铰接结构;7-牵拉结构;8-支撑杆;9-绕动轴;10-贯穿孔;
28.101-第一环体;102-第二环体;103-移动轨道;104-环槽;
29.21-固定环座;22-分瓣夹板组;23-调节螺母;24-楔形凸起;
30.41-管体;42-滚动轴承;421-外轴承圈;422-内轴承圈;
31.51-固定钳板;52-升降机构;53-导向钳板;54-开槽;
32.71-条状体;72-卡扣;
33.91-筒轴体;92-芯轴体;93-绕动螺母。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.如图1至图5所示,本发明提供了一种多功能的胃肠外科用导管固定装置,包括弹性环体1,弹性环体1上安装有第一导管夹持件2和第二导管夹持件3,且第一导管夹持件2和第二导管夹持件3通过滑动结构4滑动安装在弹性环体1上,滑动结构4使第一导管夹持件2或第二导管夹持件3沿弹性环体1的周向移动。
36.弹性环体1的某一直径的两端位置上均设置有角度调节机构5,两个角度调节机构5同步工作使弹性环体1以两个角度调节机构5所在的直径为折线进行对折动作。
37.本发明能够通过在弹性环体1上设置一个或多个用于夹持导管的夹持件(第一导管夹持件2和第二导管夹持件3),并且每个夹持件都能够在弹性环体1上自由的移动,在具有一个导管的固定情况下,一个导管通过第一导管夹持件2和第二导管夹持件3共同夹持,也就是说导管的部分充当了弹性环体1的直径,由于第一导管夹持件2和第二导管夹持件3可以通过滑动结构4在弹性环体1上自由移动,也就是说这个“直径”不是唯一的长度,是可以根据第一导管夹持件2和第二导管夹持件3在弹性环体1上的位置进行变化,优选的第一导管夹持件2和第二导管夹持件3分别位于弹性环体1的某一直径的两端,实现多个夹持件对导管的多段夹持,同时也能够通过多个夹持件对应夹持多个导管,并且在导管受力的过程中,能够实现在弹性环体上的自由移动,导管在病患肢体动作时,能够适应性的进行动作,减少对导管的牵拉施力。
38.而角度调节机构5的目的则是在于:
39.由于弹性环体1的结构使得第一导管夹持件2和第二导管夹持件3均是在同一水平面上进行调节转动,那么当需要导管以与人体所在的平面呈一定的角度插入人体组织时,只能够通过整体的角度转动(相对于水平面),而为了追求滑动结构4在弹性环体1上的低阻尼转动特性(其目的是,人体肢体的微小动作作用于导管上,导管也能够施力于滑动结构4,
使得滑动结构4在弹性环体1上滑动,来适应人体肢体的变化),弹性环体1整体的角度转动,则容易让滑动结构4在重力的作用下,自动的滑动改变了第一导管夹持件2和第二导管夹持件3对于导管的夹持位置,通过两个角度调节机构5同步工作(手动调节,角度调节机构5最简单的替换结构就是长尾夹)使弹性环体1以某一直径为轴线弯折,这样弹性环体1能够进行角度(也就是第一导管夹持件2或第二导管夹持件3夹持导管的角度)的调节的同时,弹性环体1具备了以某一直径为轴线的两侧的两个移动轨道,将多个导管夹持件放置在两个移动轨道上互不影响。
40.进一步地,本发明中的角度调节机构5包括固定钳板51,固定钳板51的纵截面呈“匚”字形,竖直安装在固定钳板51上的升降机构52(具体为丝杠螺母副传动组件),以及对称安装在固定钳板51内侧表面的两个导向钳板53(纵截面同样呈“匚”字形),两个导向钳板53分布在升降机构52的两侧,且两个导向钳板53与升降机构52连接(具体为铰接),导向钳板53的中间通过转轴安装在固定钳板51上,两个固定钳板51在升降机构52的驱动下绕转轴转动,从而对弹性环体1进行弯折。
41.具体地,导向钳板53上设置有安装弹性环体1的开槽54,弹性环体1从两个导向钳板53的开槽54中穿过。
42.进一步地,本发明提供一种弹性环体1包括第一环体101和第二环体102,(在此实施例中,角度调节机构5的导向钳板53上的开槽54则包括两个,具体如图5所示),且第一环体101和第二环体102的轴心在同一直线上,第一环体101和第二环体102的周向之间形成有移动轨道103,且滑动结构4安装在移动轨道103中,且滑动结构4的顶部与第二环体102连接,滑动结构4的底部与第一环体101连接,滑动结构4在外力作用下沿移动轨道103移动。
43.滑动结构4包括管体41,以及套装在管体41上的滚动轴承42,第一导管夹持件2或第二导管夹持件3套装在管体41内;
44.滚动轴承42包括外轴承圈421和内轴承圈422,内轴承圈422和管体41固定连接,外轴承圈421和内轴承圈422转动套接,第一环体101的顶部表面和第二环体102的底部表面设置有与外轴承圈421相配合的环槽104。
45.第一导管夹持件2或第二导管夹持件3均包括固定环座21,以及安装在固定环座21上的分瓣夹板组22,分瓣夹板组22包括环形阵列在固定环座21上的多个板体,具体的板体采用具有弹性的橡胶板,且多个板体沿固定环座21的轴向延伸;
46.进一步地,为了实现对周向穿过固定环座21和分瓣夹板组22的导管的固定松紧度的调节,固定环座21与分瓣夹板组22的连接处螺纹连接有调节螺母23,调节螺母23和固定换做21之间螺纹连接,且调节螺母23的内壁上设置有与每个板体相对应的楔形凸起24,楔形凸起24在调节螺母23的径向上的高度逐渐减小,也就是通过转动调节螺母23,通过调节螺母23上的楔形凸起24对分瓣夹板组22施加沿固定环座21径向的作用力。
47.进一步地,本发明还有意于将第一环体101和第二环体102通过铰接结构6连接,其目的是为了第一环体101和第二环体102之间能够进行相对角度的调节,第一环体101和第二环体102之间的角度调节范围为0~180
°
,其能够实现的作用是在针对于肠胃外科疾病时,通常需要使用导管来检查肠胃科疾病,其中导管需要通过患者的口腔部插入进,其中导管插入患者口部的位置处需要通过固定装置保持稳定性,主要是对导管起到一个支撑作用,避免导管在患者嘴部不方便移动,此时,本发明中的第一环体101和第二环体102的对于
导管的固定夹持的应用场景则变成用于导管从嘴部插入的情况下:
48.在此情况下,将第一环体101和第二环体102手动转动呈一定的角度(第一环体101和第二环体102转动成这种状态的前提是,第一环体101与导向钳板53之间的连接是可拆卸的,第二环体102与导向钳板53则是相对固定连接的),第一环体101则套装在人体的头部,让铰接结构6垫在人体的鼻子部位,此时可以将第二环体102位于嘴部的上方,将第一导管夹持件2或第二导管夹持件3的固定环座21移动至朝向嘴部的方向,使得导管从适合的角度进入,在固定了导管的同时,第一导管夹持件2或第二导管夹持件3的固定环座21依然能够在第二环体102的环槽104上滑动(也就是说,此时外轴承圈421和环槽104之间的连接是相对的滚动连接,并且外轴承圈421不脱离第二环体102的环槽104)。
49.在将第一环体101和第二环体102手动搬动呈一定的角度的情况下,第一导管夹持件2或第二导管夹持件3的固定环座21能够位于第一环体101或第二环体102上,那么在实际的临床使用过程中,多个第一导管夹持件2或第二导管夹持件3的固定环座21夹持多个导管,则可以通过铰接结构6(具体铰接轴)与吊架或支架进行固定连接,来获得多个导管与人体组织部分的不同角度和位置的接触,相互之间不会影响,并且每个第一导管夹持件2或第二导管夹持件3的固定环座21都能够在第一环体101或第二环体102上活动绕其周向转动的自由度,来适应人体肢体的动作对导管的位置变化和牵拉作用。
50.铰接结构6位于两个角度调节机构5中间的第二环体102上。
51.进一步地,为了实现对第一环体101和第二环体102在铰接结构6的作用下的两者之间的角度变化后的状态进行固定,通过在固定钳板51的外侧表面设置有牵拉结构7,牵拉结构7包括多个条状体71,多个条状体71通过长度方向上的侧边依次连接(也就是说,前一个条状体71是沿着下一个条状体71的长度方向移动,从而实现长度的增加,反之缩短。实现便于收纳和调节的目的)。
52.且位于第一个的条状体71与固定钳板51转动连接(多个条状体71能够实现与固定钳板51的连接,也能够实现在固定钳板51的表面转动),其目的是为了适应第一环体101和第二环体102之间的角度变化,位于最后一个的条状体71的端部设置有卡扣72,且第一环体102上设置有与卡扣72相配合的扣孔。
53.本发明中的牵拉结构7视为在本发明固定钳板51的技术手段的一种优选的具体实施方式,而牵拉结构7具体还可以是弹性带。
54.进一步地,在上述实施例的基础上,弹性环体1可以通过贯穿孔10与现有的支架结构进行安装,而为了更好的实现本发明的导管固定作用,本发明提供了一种通过贯穿孔10安装上述弹性环体1的支架结构,具体包括支撑杆8,支撑杆8可以采用现有的多自由度杆体结构,以及安装在支撑杆8上的绕动轴9,绕动轴9安装在支撑杆8的顶部,且与支撑杆8垂直固定连接。
55.两个角度调节机构5的固定钳板51上均设置有贯穿孔10(贯穿孔10的位置可以根据实际的情况进行设置,本发明图1中则也可以是将贯穿孔10以及设置贯穿孔10的板体安装在升降机构上),且两个固定钳板51通过贯穿孔10安装在绕动轴9上,其目的是为了让整个弹性环体1能够在以绕动轴9为转轴进行自由的转动,也就是说绕动轴9和贯穿孔10之间为间隙配合,弹性环体1整体在扰动轴9上的转动则主要是基于导管受力过程中对弹性环体1的作用力,从而在导管受到肢体的动作时,则可以适应性的通过弹性环体1在绕动轴9上的
转动来进行角度的调节。
56.其主要的功能体现在,肢体动作时,导管与人体组织接触的部分和角度发生变化,通过转动的方式来适应这种变化,另一种则是,可以主动的控制弹性环体1在绕动轴9上的转动角度,来使得在进行导管的插入动作时,进行主动的导管角度的固定,而此部分实现则具体依靠一种具体的绕动轴,为此:
57.本发明进一步地提供了一种配合上述功能的绕动轴9,包括与支撑杆8固定连接的筒轴体91,以及轴向套装在筒轴体91内的芯轴体92,其中筒轴体91和芯轴体92的连接方式可以是螺纹连接或者具有阻尼性的直接套接,其目的都是为了实现筒轴体91和芯轴体92之间安装位置,也就是两者之间可以进行长度的调节,进一步地也能够和贯穿孔10之间实现快速便捷的拆装,筒轴体91和芯轴体92上均设置有与贯穿孔10相配合的绕动螺母93,绕动螺母93通过轴承连接筒轴体91或芯轴体92,绕动螺母92的作用则是用于贯穿孔10和绕动轴9之间的位置固定,也就是绕动螺母92套装在贯穿孔10的内部,绕动轴9轴向穿过两个绕动螺母92。
58.进一步地,绕动螺母92也可以是一种轴承结构。
59.以上实施例仅为本技术的示例性实施例,不用于限制本技术,本技术的保护范围由权利要求书限定。本领域技术人员可以在本技术的实质和保护范围内,对本技术做出各种修改或等同替换,这种修改或等同替换也应视为落在本技术的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1