一种神经损伤性手臂按摩机
1.本发明涉及医疗器械技术领域,更具体地说,本发明涉及一种神经损伤性手臂按摩机。
背景技术:
2.通常来说,手臂在在神经损伤后的恢复过程中,通过按摩方式促进患者的肢体恢复,但常见的手臂按摩机还存在一些缺陷。
3.如中国专利公开的用于医疗神经科的手臂按摩机器人,公开号为cn106038219b的专利提出通过二号液压缸带动按摩滑块移动方式来调节两个手臂按摩装置的距离,同时通过调节按摩结构的角度改变按摩姿势。
4.但上述现有技术中,按摩结构在使用时的包裹性不强,不方便将手臂自动进行全方位按摩操作,进而降低手臂按摩效果,同时不方便根据使用者手臂的粗细进行自动调节使用,因此需要提出一种神经损伤性手臂按摩机。
技术实现要素:
5.为了克服现有技术的上述缺陷,本发明的实施例提供一种神经损伤性手臂按摩机,通过移动结构的使用方便将按摩结构进行左右移动,同时配合转动结构的使用,方便将按摩结构绕手臂旋转按摩,从而提高按摩效果,且通过调节结构的设置方便根据使用者的手臂粗细进行按摩机的调节,进而解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种神经损伤性手臂按摩机,包括升降结构,所述升降结构的一侧固定安装有用于将按摩结构移动的移动结构,所述移动结构包括横板,且横板的内部固定安装有固定电机,所述固定电机的转轴顶端固定连接有转盘,且转盘的顶部两侧均固定连接有滑柱,所述横板的顶部开设有限位槽,且限位槽的内部移动连接有限位块,所述限位块的顶部固定连接有移动架板;所述横板的中部顶侧固定安装有中部支撑架,且中部支撑架的顶部固定安装有用于支撑手臂的震动结构;所述移动架板的内侧固定安装有用于将按摩结构绕手臂旋转的转动结构,且转动结构包括连接皮带,所述连接皮带的一侧内壁转动连接有固定柱,且固定柱的一端外壁固定安装有小齿轮,所述固定柱的一端固定安装有联动齿轮,且联动齿轮的外壁啮合有开口齿环,所述开口齿环的内壁固定连接有开口旋转环,且开口旋转环的内部设置有用于将手臂进行按摩的调节结构。
7.在一个优选地实施方式中,所述升降结构包括支撑架板,且支撑架板的顶部固定安装有驱动电机,所述驱动电机的转轴底端固定连接有螺纹杆,且螺纹杆的外壁螺纹连接有移动固定架,所述移动固定架的一侧内壁移动连接有固定杆,且固定杆对称安装在支撑架板的内部,所述移动固定架的内壁与横板的中部外壁固定连接。
8.在一个优选地实施方式中,所述限位块对称安装在移动架板的底部,且移动架板
通过限位块与横板移动连接,所述移动架板的底部一侧开设有固定槽,且滑柱移动设置在固定槽内部,所述滑柱的顶端通过轴承转动安装有活动板,且活动板的一侧顶部固定安装有齿板,且齿板与小齿轮相互啮合设置,所述活动板贴合移动设置在移动架板的底部内壁。
9.在一个优选地实施方式中,所述震动结构包括支撑弧板,且支撑弧板固定安装在中部支撑架的顶部内侧,所述支撑弧板的内部等距离设置有移动柱,且移动柱移动设置在支撑弧板内部,所述转盘的中心顶部固定连接有连接杆,且连接杆的顶端固定安装有中部齿轮。
10.在一个优选地实施方式中,所述移动柱的底端外壁设置有震动弹簧,且震动弹簧的顶端与支撑弧板的底部固定连接,所述震动弹簧的底端与移动柱的外壁固定连接,且移动柱通过震动弹簧与支撑弧板弹性连接,所述中部齿轮的外壁啮合有连接齿轮,且连接齿轮通过转柱转动安装在中部支撑架的内部,所述连接杆通过轴承与中部支撑架转动连接。
11.在一个优选地实施方式中,所述的转柱外壁固定连接有传动齿轮,且连接齿轮的一侧设置有旋转杆,所述旋转杆的一端同样设置有传动齿轮,且连接齿轮的转柱通过传动齿轮与旋转杆转动连接,所述旋转杆转动安装在中部支撑架的内部,所述旋转杆的外壁等距离安装有凸轮,且凸轮的顶部与移动柱的底端挤压设置,多个所述凸轮不同角度安装在旋转杆的外部。
12.在一个优选地实施方式中,所述联动齿轮与开口齿环相互啮合设置,且联动齿轮对称设置在开口齿环的底部,所述固定柱转动安装在移动架板的内部,且两个所述固定柱之间通过连接皮带转动连接。
13.在一个优选地实施方式中,所述开口旋转环的外壁固定连接有限位环,且限位环的外壁转动连接有固定环,所述固定环的一侧固定连接有连接环板,且连接环板固定安装在移动架板的一侧内壁,所述限位环和固定环与开口旋转环相同设置有开口。
14.在一个优选地实施方式中,所述调节结构包括连接板,且连接板固定安装在开口旋转环的外壁,所述连接板的一侧顶部固定安装有旋转马达,且旋转马达的转轴顶端固定连接有螺纹柱,所述螺纹柱的外壁转动连接有联动皮带,且两个所述螺纹柱之间通过联动皮带转动连接。
15.在一个优选地实施方式中,所述螺纹柱通过轴承转动安装在开口旋转环内部,且螺纹柱的外壁螺纹连接有螺纹套筒,所述螺纹套筒的顶端固定安装有按摩弧板,且按摩弧板的内部等距离转动安装有按摩滚珠,所述按摩弧板的底部对称安装有限位柱,且限位柱移动设置在开口旋转环内部。
16.本发明的技术效果和优点:通过移动结构的使用方便将按摩结构进行左右移动,同时配合转动结构的使用,方便将按摩结构绕手臂旋转按摩,进而方便将使用者的手臂进行包裹式全方位按摩操作,从而提高按摩效率;通过震动结构内部的结构的配合使用,方便将手臂进行支撑,保证使用者手臂放松的同时,将手臂进行抖动按摩,从而方便加快使用者手臂的血液循环,提高按摩机的使用效果;通过调节结构内部结构的配合使用,方便根据使用者的大臂和小臂尺寸进行按摩机的自动调节操作,进而方便将按摩结构贴合使用者的手臂使用,保证按摩效果,同时提高
按摩机的适用性,增加按摩机的使用价值;通过升降结构的设置使用,方便将按摩机的高度根据使用者坐着的高度进行调节,从而保证按摩机的正常使用,同时匹配多种高度的座椅使用,方便使用者操作使用的同时,增加使用者使用的舒适度。
附图说明
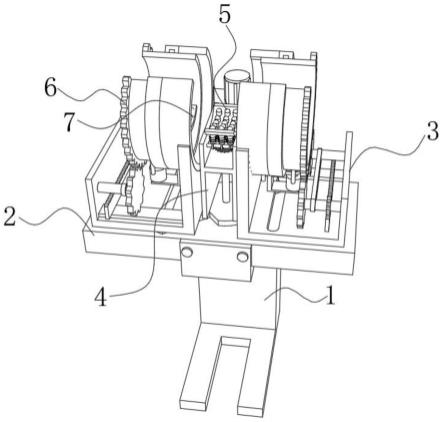
17.图1为本发明的整体结构示意图;图2为本发明的空间结构示意图;图3为本发明移动结构的内部结构示意图;图4为本发明转动结构的结构示意图;图5为本发明调节结构的结构示意图;图6为本发明震动结构和中部支撑架的连接结构示意图;图7为本发明震动结构的结构示意图;图8为本发明升降结构的结构示意图。
18.附图标记为:1、升降结构;11、支撑架板;12、驱动电机;13、螺纹杆;14、固定杆;15、移动固定架;2、移动结构;21、横板;22、固定电机;23、转盘;24、滑柱;25、限位槽;26、限位块;27、固定槽;28、活动板;29、齿板;3、移动架板;4、中部支撑架;5、震动结构;51、支撑弧板;52、移动柱;53、连接杆;54、震动弹簧;55、中部齿轮;56、连接齿轮;57、旋转杆;58、凸轮;59、传动齿轮;6、转动结构;61、连接皮带;62、小齿轮;63、固定柱;64、联动齿轮;65、开口齿环;66、开口旋转环;67、限位环;68、固定环;69、连接环板;7、调节结构;71、连接板;72、旋转马达;73、螺纹柱;74、联动皮带;75、螺纹套筒;76、按摩弧板;77、按摩滚珠;78、限位柱。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.实施例一:根据图1-3和图8所示的一种神经损伤性手臂按摩机,包括升降结构1,升降结构1的一侧固定安装有用于将按摩结构移动的移动结构2,移动结构2包括横板21,且横板21的内部固定安装有固定电机22,固定电机22的转轴顶端固定连接有转盘23,且转盘23的顶部两侧均固定连接有滑柱24,横板21的顶部开设有限位槽25,且限位槽25的内部移动连接有限位块26,限位块26的顶部固定连接有移动架板3。
21.升降结构1包括支撑架板11,且支撑架板11的顶部固定安装有驱动电机12,驱动电机12的转轴底端固定连接有螺纹杆13,且螺纹杆13的外壁螺纹连接有移动固定架15,移动固定架15的一侧内壁移动连接有固定杆14,且固定杆14对称安装在支撑架板11的内部,移动固定架15的内壁与横板21的中部外壁固定连接。
22.限位块26对称安装在移动架板3的底部,且移动架板3通过限位块26与横板21移动连接,移动架板3的底部一侧开设有固定槽27,且滑柱24移动设置在固定槽27内部,滑柱24
的顶端通过轴承转动安装有活动板28,且活动板28的一侧顶部固定安装有齿板29,且齿板29与小齿轮62相互啮合设置,活动板28贴合移动设置在移动架板3的底部内壁。
23.实施方式具体为:首先使用者将椅子放置在按摩机的侧边,根据需要按摩的手臂选择左右侧,然后驱动电机12带动螺纹杆13在支撑架板11内部转动,进而将移动固定架15带动移动结构2和移动架板3等结构向上移动,从而将按摩机的高度进行调节,且固定杆14的设置方便将移动固定架15进行限位,当高度调节完成后,使用者将手臂放置在转动结构6的内部,并通过震动结构5将手臂进行放置支撑,然后转动结构6带动调节结构7将手臂进行环绕按摩,同时固定电机22带动转盘23将滑柱24移动架板3的固定槽27内部移动,进而将移动架板3带动转动结构6和调节结构7进行移动,且移动架板3底部的限位块26在横板21的限位槽25内部移动,进而方便移动架板3的限位,且横板21顶部的两个移动架板3进行相向移动,进而将按摩结构带动左右移动,将手臂的各个位置进行按摩操作,且转盘23的旋转角度为四十度,且转盘23反复进行左右旋转操作。
24.根据图1、图6和图7所示的一种神经损伤性手臂按摩机,横板21的中部顶侧固定安装有中部支撑架4,且中部支撑架4的顶部固定安装有用于支撑手臂的震动结构5;震动结构5包括支撑弧板51,且支撑弧板51固定安装在中部支撑架4的顶部内侧,支撑弧板51的内部等距离设置有移动柱52,且移动柱52移动设置在支撑弧板51内部,转盘23的中心顶部固定连接有连接杆53,且连接杆53的顶端固定安装有中部齿轮55;移动柱52的底端外壁设置有震动弹簧54,且震动弹簧54的顶端与支撑弧板51的底部固定连接,震动弹簧54的底端与移动柱52的外壁固定连接,且移动柱52通过震动弹簧54与支撑弧板51弹性连接,中部齿轮55的外壁啮合有连接齿轮56,且连接齿轮56通过转柱转动安装在中部支撑架4的内部,连接杆53通过轴承与中部支撑架4转动连接;连接齿轮56的转柱外壁固定连接有传动齿轮59,且连接齿轮56的一侧设置有旋转杆57,旋转杆57的一端同样设置有传动齿轮59,且连接齿轮56的转柱通过传动齿轮59与旋转杆57转动连接,旋转杆57转动安装在中部支撑架4的内部,旋转杆57的外壁等距离安装有凸轮58,且凸轮58的顶部与移动柱52的底端挤压设置,多个凸轮58不同角度安装在旋转杆57的外部。
25.实施方式具体为:将手臂放置在震动结构5的顶部,调节结构7对大臂和小臂按摩的同时,由于转盘23的转动,将中部齿轮55带动旋转,且中部齿轮55通过连接齿轮56将传动齿轮59带动,进而将旋转杆57在中部支撑架4的内部转动,然后将凸轮58带动对移动柱52的底端进行挤压,且由于凸轮58做离心运动,同时配合震动弹簧54的使用,震动弹簧54将上移后的移动柱52通过自身弹力进行复位,进而使得移动柱52反复上下移动操作,且配合传动齿轮59的使用将多个旋转杆57和凸轮58带动,进而将移动柱52形成振动结构,且移动柱52的顶端固定安装有硅胶头,进而增加了移动柱52与手臂接触使用时的舒适度,然后将手臂的支撑处进行抖动按摩,且方便提高手臂的血液循环,增加其按摩效果,且支撑弧板51中部的移动柱52为固定结构,且中部的移动柱52底部的长度短于边侧的移动柱52,进而方便中部齿轮55的使用。
26.实施例二,在实施例一的基础上,另一实施例具体为:根据图2、图4和图5所示的一种神经损伤性手臂按摩机,移动架板3的内侧固定安装有用于将按摩结构绕手臂旋转的转动结构6,且转动结构6包括连接皮带61,连接皮带61
的一侧内壁转动连接有固定柱63,且固定柱63的一端外壁固定安装有小齿轮62,固定柱63的一端固定安装有联动齿轮64,且联动齿轮64的外壁啮合有开口齿环65,开口齿环65的内壁固定连接有开口旋转环66,且开口旋转环66的内部设置有用于将手臂进行按摩的调节结构7。
27.联动齿轮64与开口齿环65相互啮合设置,且联动齿轮64对称设置在开口齿环65的底部,固定柱63转动安装在移动架板3的内部,且两个固定柱63之间通过连接皮带61转动连接。
28.开口旋转环66的外壁固定连接有限位环67,且限位环67的外壁转动连接有固定环68,固定环68的一侧固定连接有连接环板69,且连接环板69固定安装在移动架板3的一侧内壁,限位环67和固定环68与开口旋转环66相同设置有开口。
29.调节结构7包括连接板71,且连接板71固定安装在开口旋转环66的外壁,连接板71的一侧顶部固定安装有旋转马达72,且旋转马达72的转轴顶端固定连接有螺纹柱73,螺纹柱73的外壁转动连接有联动皮带74,且两个螺纹柱73之间通过联动皮带74转动连接。
30.螺纹柱73通过轴承转动安装在开口旋转环66内部,且螺纹柱73的外壁螺纹连接有螺纹套筒75,螺纹套筒75的顶端固定安装有按摩弧板76,且按摩弧板76的内部等距离转动安装有按摩滚珠77,按摩弧板76的底部对称安装有限位柱78,且限位柱78移动设置在开口旋转环66内部。
31.实施方式具体为:手臂放置在转动结构6内部后,旋转马达72带动螺纹柱73进行旋转,且联动皮带74的设置方便将两侧的按摩结构同时带动使用,螺纹柱73旋转的同时配合限位柱78在开口旋转环66内部移动限位,进而将螺纹套筒75在螺纹柱73的外部移动,从而将按摩弧板76带动按摩滚珠77移动至使用者的手臂外部,将按摩滚珠77与使用者的手臂贴合后,滑柱24的移动将齿板29带动,且齿板29在小齿轮62的底部移动,使得小齿轮62带动固定柱63将联动齿轮64转动,且由于小齿轮62的尺寸小于联动齿轮64,进而联动齿轮64可以多旋转几圈将开口齿环65带动旋转整圈,且连接皮带61的设置方便将两侧的固定柱63和联动齿轮64同时进行转动,进而将开口齿环65带动开口旋转环66转动,且开口旋转环66的转动将限位环67在固定环68内部转动,进而方便将开口旋转环66进行限位,同时开口齿环65的缺口转动到联动齿轮64的一侧后,通过另一侧的联动齿轮64将开口齿环65接着旋转,进而保证将调节结构7绕手臂旋转按摩,且连接环板69的设置方便将固定环68安装在移动架板3的一侧,进而方便通过移动架板3将转动结构6和调节结构7进行移动调节按摩位置。
32.本发明工作原理:首先使用者根据需要按摩的手臂,将椅子放置在按摩机的侧边,然后通过升降结构1的使用将按摩机调节至合适高度,再然后使用者将手臂放置在转动结构6的内部,并通过震动结构5将手臂进行支撑,旋转马达72带动螺纹柱73旋转,进而将螺纹套筒75带动按摩弧板76和按摩滚珠77移动至使用者的手臂外部,将按摩滚珠77与使用者的手臂贴合后,固定电机22将转盘23带动旋转,且转盘23为固定角度反复旋转操作,转盘23带动滑柱24在移动架板3的内部移动,进而将移动架板3的限位块26在横板21的限位槽25内部移动,从而将移动架板3带动按摩结构反复左右移动,同时滑柱24的移动将齿板29带动左右移动,从而将小齿轮62带动联动齿轮64旋转,从而将开口旋转环66带动调节结构7旋转,进而将使用者的手臂进行环绕按摩操作,同时转盘23的转动将连接杆53带动,且通过中部齿轮55、连接齿轮56和传动齿轮59的配合使用,将旋转杆57带动凸轮58挤压移动柱52,同时配
合震动弹簧54的使用,进而使移动柱52反复上下移动,从而将多个移动柱52对手臂的支撑处进行抖动按摩,方便提高手臂的血液循环,增加按摩效果。
33.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;其次:本发明公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本发明同一实施例及不同实施例可以相互组合;最后:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1