一种柔性激光手术刀电磁驱控一体化系统
本发明涉及激光手术刀,具体涉及一种柔性激光手术刀电磁驱控一体化系统。
背景技术:
1、激光显微技术近年来被应用于各种医疗手术场景中,如经口咽喉显微手术、经尿道前列腺切除手术和屈光手术。组织创伤小、术后康复时间短和康复效果佳是激光显微手术相较于传统手动微创手术的主要优势。
2、电磁驱动导管介入手术是在微细导管或者介入导丝的末端固定安置一磁体或铁磁性标记物,利用磁场的空间梯度变化对导管末端磁体或铁磁性标记物的力和力矩作用,实现导管末端的导向控制。现有的电磁驱动介入手术机器人技术虽然可远程地遥控导管介入机器人,但由于其依赖于放射性导航技术,也带来了患者将长期暴露于辐射环境下的不利影响。此外,外驱磁体体积过大、无法进行三维空间的立体定位、整套系统存在操作反应时间略长、导管端部支撑强度略低和产生的外部磁场可控性略差也是目前电磁驱动导管介入手术机器人存在的技术难题。目前,电磁驱动导管介入机器人普遍使用前馈控制方式,系统的稳定性和可靠性不高,如何解决该问题已成为电磁驱动导管介入机器人领域的研究热点。
技术实现思路
1、本发明是为了解决上述问题而进行的,目的在于提供一种能高效完成组织消融任务,结构紧凑,能实时误差补偿以实现准确控制的的一种柔性激光手术刀电磁驱控一体化系统。
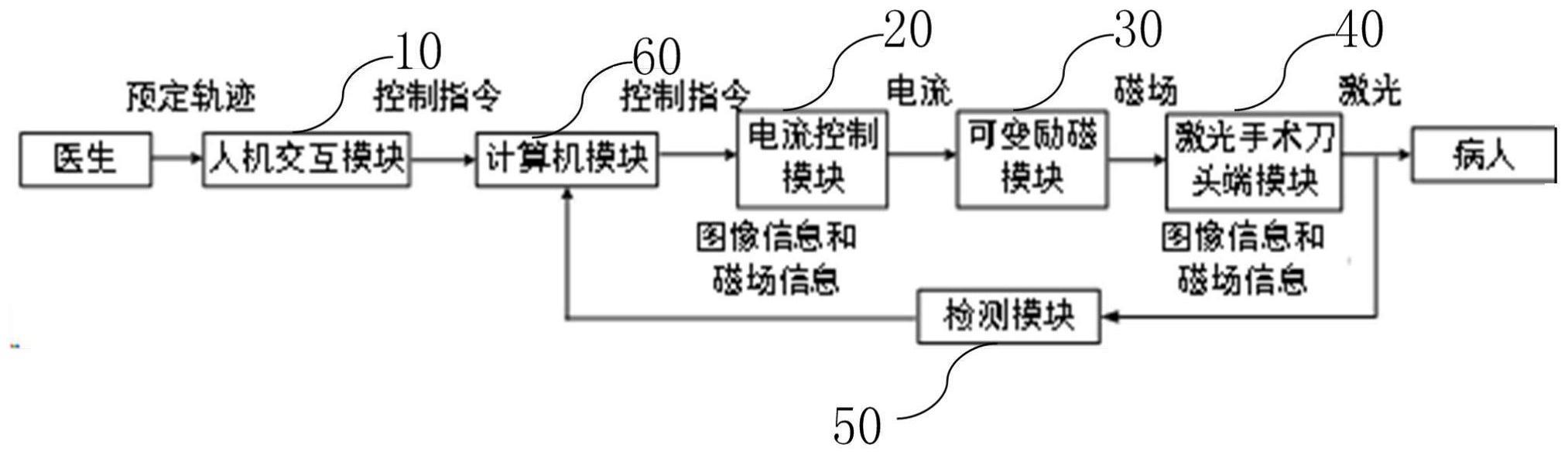
2、本发明提供了一种柔性激光手术刀电磁驱控一体化系统,具有这样的特征,包括:人机交互模块,用于生成医生的控制指令,并将控制指令传递给电流控制模块;电流控制模块,用于接收控制指令,并根据控制指令控制通入可变励磁模块的激励电流的大小和方向;可变励磁模块,与电流控制模块相连接,用于根据激励电流的大小和方向产生可变磁场;激光手术刀头端模块,与可变励磁模块相连接,用于产生激光并在可变磁场的作用下进行激光光束的转向;检测模块,用于检测图像信息以及将可变磁场和永磁体激发的静态磁场信息进行叠加得到磁场信息,并将检测图像信息和磁场信息传递给计算机模块;计算机模块,与人机交互模块、电流控制模块、检测模块相连接,用于根据检测图像信息和磁场信息进行可视化、图像定位算法计算和永磁体位置反解算法计算。
3、在本发明提供的柔性激光手术刀电磁驱控一体化系统中,还可以具有这样的特征:其中,可变励磁模块包括多个励磁单元,均固定在外壳内,多个励磁单元均匀对称分布在永磁体周围。可变励磁模块在其中心区域建立一个均匀分布的可变磁场。
4、在本发明提供的柔性激光手术刀电磁驱控一体化系统中,还可以具有这样的特征:其中,电流控制模块通过控制通入可变励磁模块的电流的大小和方向,从而实现对可变励磁模块产生的磁场的大小和方向的控制。
5、在本发明提供的柔性激光手术刀电磁驱控一体化系统中,还可以具有这样的特征:其中,可变励磁模块在通电情况下,通过调整其产生磁场的大小和方向来控制永磁体的运动。永磁体的运动带动柔性光纤偏移,继而达到控制激光光束偏移的目的。
6、在本发明提供的柔性激光手术刀电磁驱控一体化系统中,还可以具有这样的特征:其中,检测模块包括视觉单元或磁检测单元,分别实现系统的视觉反馈和磁反馈。
7、在本发明提供的柔性激光手术刀电磁驱控一体化系统中,还可以具有这样的特征:其中,视觉单元由用于照明功能的照明灯和用于可视化功能的相机组成,视觉反馈的具体实现方法如下:步骤a,将照明灯与相机均固定于外壳内,通过照明灯和相机获得手术部位的图像并传递给计算机模块;步骤b,通过相机标定获得激光光斑所在坐标系与图像坐标系之间的对应关系;步骤c,通过图像算法获得激光光斑所在图像坐标系中的位置,再根据激光光斑所在坐标系与图像坐标系之间的对应关系得到激光光斑实际所在位置;步骤d,计算机模块根据反解所得的光斑运动位置与预定轨迹相比较的结果,对电流控制模块发出新的控制指令,实现误差补偿。
8、在本发明提供的柔性激光手术刀电磁驱控一体化系统中,还可以具有这样的特征:其中,磁检测单元由检测永磁体位置的磁检测传感器阵列组成,磁反馈的具体实现方法如下:步骤a,标记永磁体固定于柔性光纤上,磁检测传感器阵列固定在外壳上;步骤b,建立标记永磁体激发的空间磁场分布与标记永磁体位置和姿态参数之间的映射关系;步骤c,基于磁检测传感器阵列测量其所在位置处的磁通密度分布情况,磁检测传感器阵列处的磁场是由可变励磁模块激发的可变磁场和标记永磁体激发的静态磁场叠加组成;步骤d,将柔性光纤视为悬臂梁,结合永磁体固定于柔性光纤的位置信息,通过永磁体运动的位置和姿态参数求得柔性光纤自由端的运动位置;步骤e,计算机模块根据反解所得的柔性光纤的自由端运动位置与预定轨迹相比较的结果,对电流控制模块发出新的控制指令,实现误差补偿。
9、在本发明提供的柔性激光手术刀电磁驱控一体化系统中,还可以具有这样的特征:其中,柔性激光手术刀电磁驱控一体化系统工作流程具体包括如下步骤:步骤1,准备工作,通过照明灯和相机对病变组织处的周围区域进行可视化,医生通过看到的图像准确获得待消融区域;步骤2,根据图像,医生将消融的预定轨迹通过人机交互模块转换成控制指令传递给电流控制模块;步骤3,电流控制模块将所获得的控制指令转换成对应的电流并将电流通入可变励磁模块;步骤4,可变励磁模块通过调整其产生的磁场的大小和方向来控制永磁体的运动,永磁体的运动带动柔性光纤的偏移,继而达到控制激光光束偏移的目的;步骤5,激光光束在经过聚焦准直镜后聚焦于医生规划的待消融区域;步骤6,检测模块将视觉单元获取的病人手术部位图像信息和磁检测单元获取的磁场信息传输给计算机模块,计算机模块根据图像定位算法得到光斑运动的位置,根据永磁体位置反解算法求解出柔性光纤自由端的运动位置并将该位置信息与预定轨迹进行比较,比较的结果用于给电流控制模块新的控制指令,从而实现误差补偿;步骤7,消融结束后,关闭激光发生器;步骤8,将激光手术刀收回,清理相关配件以备后续继续使用。
10、发明的作用与效果
11、根据本发明所涉及的柔性激光手术刀电磁驱控一体化系统,因为包括:人机交互模块,用于生成医生的控制指令,并将控制指令传递给电流控制模块;电流控制模块,用于接收控制指令,并根据控制指令控制通入可变励磁模块的激励电流的大小和方向;可变励磁模块,与电流控制模块相连接,用于根据激励电流的大小和方向产生可变磁场;激光手术刀头端模块,与可变励磁模块相连接,用于产生激光并在可变磁场的作用下进行激光光束的转向;检测模块,用于检测图像信息以及将可变磁场和永磁体激发的静态磁场信息进行叠加得到磁场信息,并将检测图像信息和磁场信息传递给计算机模块;计算机模块,与人机交互模块、电流控制模块、检测模块相连接,用于根据检测图像信息和磁场信息进行可视化、图像定位算法计算和永磁体位置反解算法计算。
12、所以本发明的有益效果是:本发明使用高功率密度的激光作为能量传输介质,可对传统手术难以到达的病理区进行消融。本发明的激光位置控制的形式直观,驱动机构的设计紧凑,同时应用光学透镜将激光聚焦在待消融组织上,实现了非接触的组织消融。本发明在内窥镜尖端对激光进行扫描,以实现组织消融的高质量。本发明使用检测模块将激光光斑位置传递给计算机,计算机将该位置信息与理想的激光光斑轨迹相比较,进行实时误差无偿,最终实现准确控制激光位置的目的。
- 还没有人留言评论。精彩留言会获得点赞!