一种辅助肱骨近端骨折复位的解剖型人工骨的制作方法
1.本发明属于人工骨技术领域,尤其涉及一种辅助肱骨近端骨折复位的解剖型人工骨。
背景技术:
2.目前,肱骨近端骨折约占所有骨折病例的4-5%,其中老年人所占比重较大,超过71%的肱骨近端骨折发生于60岁以上的老年人。随着老龄化社会的到来,其发病趋势将逐渐递增。
3.针对移位明显的肱骨近端骨折,保守治疗常因复位效果欠佳,导致肩关节功能受限,因此,治疗多以手术为主,包括闭合或切开复位、锁定钢板或髓内钉固定、人工肩关节置换等。为保留原始肩关节结构及形态,切开复位锁定钢板螺钉内固定仍是首选的手术方案。
4.但是,现有的人工骨不易与肱骨近端骨折位置进行有效贴合,易造成连接位置的错位和松动。而且在复杂肱骨近端骨折手术中,对人工骨的尺寸精度要求较高,但是现有的参数测量方式易造成肱骨近端尺寸参数的测量误差。
5.通过上述分析,现有技术存在的问题及缺陷为:
6.(1)现有的人工骨不易与肱骨近端骨折位置进行有效贴合,易造成连接位置的错位和松动。
7.(2)在复杂肱骨近端骨折手术中,对人工骨的尺寸精度要求较高,但是现有的参数测量方式易造成肱骨近端尺寸参数的测量误差。
技术实现要素:
8.针对现有技术存在的问题,本发明提供了一种辅助肱骨近端骨折复位的解剖型人工骨。
9.本发明是这样实现的,一种辅助肱骨近端骨折复位的解剖型人工骨包括:
10.固定端和支撑座;
11.所述支撑座上端面为内凹的弧形结构,所述支撑座边沿开设有多个固定孔,所述支撑座中心位置一体化连接有定位柱;
12.所述固定端一体化连接在支撑座下端,所述固定端中间开设有骨髓腔通孔,所述固定端外侧下端开设有多级倒齿结构,所述倒齿结构直径小于固定端外侧直径。
13.进一步,所述固定端和支撑座之间为弧形过渡连接。
14.进一步,所述定位柱直径为3~5mm,所述定位柱的高度的3~5mm,所述定位柱外端为弧形结构。
15.进一步,所述辅助肱骨近端骨折复位的解剖型人工骨利用纳米级二氧化锆和微米级羟基磷灰石为材料通过光固化3d打印制成,所述纳米级二氧化锆和微米级羟基磷灰石的配比为1~1.5:8.5~9。
16.进一步,所述辅助肱骨近端骨折复位的解剖型人工骨在安装使用时,采用肱骨近
端参数测量系统对骨折位置的参数进行测量,所述肱骨近端参数测量系统包括:
17.影像检测模块、图像处理模块、三维重建模块、角度调节模块、参数测量模块、参数计算模块、结果输出模块和主控模块;
18.所述主控模块分别与影像检测模块、图像处理模块、三维重建模块、角度调节模块、参数测量模块、参数计算模块和结果输出模块连接,用于对各个受控模块的采集信息进行处理分析,并根据处理结果对各个模块的运行进行协调控制;
19.所述影像检测模块用于利用影像检测设备对肱骨近端的影像图像进行采集;
20.所述图像处理模块用于利用图像处理程序对采集的肱骨近端的影像图像进行处理;
21.所述三维重建模块用于利用预处理后的肱骨近端图像构建肱骨近端三维模型;
22.所述角度调节模块用于对构建的肱骨近端三维模型进行角度变换调节;
23.所述参数测量模块用于对不同角度的肱骨近端三维模型的不同部位的尺寸参数进行自动识别测量;
24.所述参数计算模块用于根据测量的肱骨近端三维模型不同角度的尺寸参数对肱骨近端的尺寸进行计算;
25.所述结果输出模块用于利用显示面板对整体系统的采集信息和处理结构进行输出显示。
26.进一步,所述影像检测模块包括:
27.定位单元,用于对图像采集区域内的肱骨近端的位置进行定位;
28.图像采集单元,用于利用超声影像设备对肱骨近端不同角度的图像进行采集。
29.进一步,所述图像处理模块包括:
30.图像区分单元,用于将接收的肱骨近端图像按照角度进行区分,将同一角度的多张肱骨近端图像划分为同类;
31.图像筛选单元,用于在同一角度的多张肱骨近端图像中筛选出清晰度最佳的图像作为最终图像;
32.预处理单元,用于对筛选出的最终图像进行去噪处理。
33.进一步,所述预处理单元对筛选出的最终图像进行去噪处理采用的预处理方法包括:
34.(1)对肱骨近端图像进行二值化,进行轮廓提取,找出最大轮廓;
35.(2)通过连通域分析去除与背景相连通的区域和背景目标;
36.(3)通过设置区域面积大小去除图像中的噪声;
37.(4)采用形态学闭操作来填补组织边缘凹陷处的缺陷,得到图像。
38.进一步,所述三维重建模块采用的肱骨近端三维模型的构建方法包括:
39.(1)基于面绘制算法对预处理后的肱骨近端图像进行三维重建,得到用于ar系统的肱骨近端三维模型;
40.(2)采用基于改进的surf特征点匹配算法,对视频图像中的目标进行匹配跟踪,获得模型在二维图像中的位置;
41.(3)求解二维图像中目标的位置到对应三维模型空间的位置的空间变换参数;
42.(4)对三维模型进行相应的空间变换,并在二维图像中渲染即可实现二维图像与
三维模型的匹配融合。
43.进一步,所述参数测量模块在对不同角度的肱骨近端三维模型的不同部位的尺寸参数进行自动识别测量时,在肱骨近端三维模型上选择解剖标识点,基于所述肱骨近端三维模型,通过三维空间点、线、平面三元素组合式测量模式,获取肱骨近端形态学参数。
44.结合上述的技术方案和解决的技术问题,请从以下几方面分析本发明所要保护的技术方案所具备的优点及积极效果为:
45.第一、针对上述现有技术存在的技术问题以及解决该问题的难度,紧密结合本发明的所要保护的技术方案以及研发过程中结果和数据等,详细、深刻地分析本发明技术方案如何解决的技术问题,解决问题之后带来的一些具备创造性的技术效果。具体描述如下:
46.本发明中的辅助肱骨近端骨折复位的解剖型人工骨通过固定端和支撑座可以分别与肱骨近端骨折位置的下端和上端位置进行紧密配合,通过支撑座上端面为内凹的弧形结构可以对上端部位进行稳定支撑,通过固定端的多级倒齿结构可以与下端部位中的骨髓腔进行紧密固定,避免松动。
47.本发明中的辅助肱骨近端骨折复位的解剖型人工骨利用纳米级二氧化锆和微米级羟基磷灰石为材料通过光固化3d打印制成,zro2纳米颗粒可有效增强羟基磷灰石(hap)的力学性能,zro2/hap复合材料试样存在微孔结构,可为人工关节植入后期骨长入提供物理条件。
48.本发明通过采用肱骨近端参数测量系统对骨折位置的参数进行测量,可有效提高肱骨近端尺寸参数的测量准确度,为人工骨的制备提高精确的参数依据。
49.第二,把技术方案看做一个整体或者从产品的角度,本发明所要保护的技术方案具备的技术效果和优点,具体描述如下:
50.本发明能够对肱骨近端骨折位置的上端部位进行稳定支撑,并可以与下端部位中的骨髓腔进行紧密固定,避免松动,能够保证肱骨近端尺寸参数的测量准确度,为人工骨的制备提高精确的参数依据。
附图说明
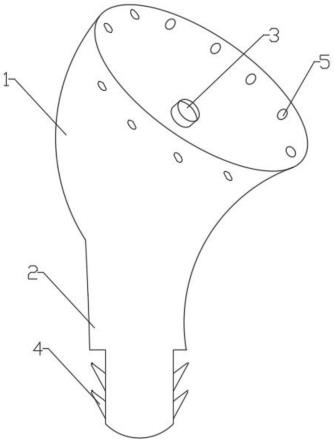
51.图1是本发明实施例提供的辅助肱骨近端骨折复位的解剖型人工骨的结构示意图。
52.图2是本发明实施例提供的肱骨近端参数测量系统的结构框图。
53.图3是本发明实施例提供的预处理方法流程图。
54.图4是本发明实施例提供的肱骨近端三维模型的构建方法流程图。
55.图中:1、支撑座;2、固定端;3、定位柱;4、倒齿结构;5、固定孔。
具体实施方式
56.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
57.一、解释说明实施例。为了使本领域技术人员充分了解本发明如何具体实现,该部分是对权利要求技术方案进行展开说明的解释说明实施例。
58.如图1所示,本发明实施例提供的辅助肱骨近端骨折复位的解剖型人工骨包括固定端2和支撑座1;所述支撑座1上端面为内凹的弧形结构,所述支撑座边沿开设有多个固定孔5,所述支撑座中心位置一体化连接有定位柱3;
59.所述固定端2一体化连接在支撑座下端,所述固定端中间开设有骨髓腔通孔,所述固定端外侧下端开设有多级倒齿结构4,所述倒齿结构直径小于固定端外侧直径。固定端和支撑座之间为弧形过渡连接。
60.本发明实施例中的定位柱直径为3~5mm,所述定位柱的高度的3~5mm,所述定位柱外端为弧形结构。
61.本发明实施例中的辅助肱骨近端骨折复位的解剖型人工骨利用纳米级二氧化锆和微米级羟基磷灰石为材料通过光固化3d打印制成,所述纳米级二氧化锆和微米级羟基磷灰石的配比为1~1.5:8.5~9。
62.本发明实施例中的辅助肱骨近端骨折复位的解剖型人工骨在安装时,先对骨折位置的参数进行测量,然后根据测量参数对人工骨进行光固化3d打印。制作完成后将人工骨放置在肱骨近端骨折位置,使得支撑座1上端面和固定端2下端分别与肱骨近端骨折位置的上下两端配合,多级倒齿结构4卡入肱骨近端骨折位置下端的骨髓腔内,利用固定钉将支撑座1进行固定。
63.所述支撑座边沿开设有多个固定孔5,所述支撑座中心位置一体化连接有定位柱3;
64.所述固定端2一体化连接在支撑座下端,所述固定端中间开设有骨髓腔通孔,所述固定端外侧下端开设有多级倒齿结构4,所述倒齿结构直径小于固定端外侧直径。固定端和支撑座之间为弧形过渡连接。
65.本发明实施例中的辅助肱骨近端骨折复位的解剖型人工骨在安装使用时,采用肱骨近端参数测量系统对骨折位置的参数进行测量,如图2所示,本发明实施例中的肱骨近端参数测量系统包括:
66.影像检测模块、图像处理模块、三维重建模块、角度调节模块、参数测量模块、参数计算模块、结果输出模块和主控模块;
67.所述主控模块分别与影像检测模块、图像处理模块、三维重建模块、角度调节模块、参数测量模块、参数计算模块和结果输出模块连接,用于对各个受控模块的采集信息进行处理分析,并根据处理结果对各个模块的运行进行协调控制;
68.所述影像检测模块用于利用影像检测设备对肱骨近端的影像图像进行采集;
69.所述图像处理模块用于利用图像处理程序对采集的肱骨近端的影像图像进行处理;
70.所述三维重建模块用于利用预处理后的肱骨近端图像构建肱骨近端三维模型;
71.所述角度调节模块用于对构建的肱骨近端三维模型进行角度变换调节;
72.所述参数测量模块用于对不同角度的肱骨近端三维模型的不同部位的尺寸参数进行自动识别测量;
73.所述参数计算模块用于根据测量的肱骨近端三维模型不同角度的尺寸参数对肱骨近端的尺寸进行计算;
74.所述结果输出模块用于利用显示面板对整体系统的采集信息和处理结构进行输
出显示。
75.本发明实施例中的影像检测模块包括:
76.定位单元,用于对图像采集区域内的肱骨近端的位置进行定位;
77.图像采集单元,用于利用超声影像设备对肱骨近端不同角度的图像进行采集。
78.本发明实施例中的图像处理模块包括:
79.图像区分单元,用于将接收的肱骨近端图像按照角度进行区分,将同一角度的多张肱骨近端图像划分为同类;
80.图像筛选单元,用于在同一角度的多张肱骨近端图像中筛选出清晰度最佳的图像作为最终图像;
81.预处理单元,用于对筛选出的最终图像进行去噪处理。
82.如图3所示,本发明实施例中的预处理单元对筛选出的最终图像进行去噪处理采用的预处理方法包括:
83.s101,对肱骨近端图像进行二值化,进行轮廓提取,找出最大轮廓;
84.s102,通过连通域分析去除与背景相连通的区域和背景目标;
85.s103,通过设置区域面积大小去除图像中的噪声;
86.s104,采用形态学闭操作来填补组织边缘凹陷处的缺陷,得到图像。
87.如图4所示,本发明实施例中的三维重建模块采用的肱骨近端三维模型的构建方法包括:
88.s201,基于面绘制算法对预处理后的肱骨近端图像进行三维重建,得到用于ar系统的肱骨近端三维模型;
89.s202,采用基于改进的surf特征点匹配算法,对视频图像中的目标进行匹配跟踪,获得模型在二维图像中的位置;
90.s203,求解二维图像中目标的位置到对应三维模型空间的位置的空间变换参数;
91.s204,对三维模型进行相应的空间变换,并在二维图像中渲染即可实现二维图像与三维模型的匹配融合。
92.本发明实施例中的参数测量模块在对不同角度的肱骨近端三维模型的不同部位的尺寸参数进行自动识别测量时,在肱骨近端三维模型上选择解剖标识点,基于所述肱骨近端三维模型,通过三维空间点、线、平面三元素组合式测量模式,获取肱骨近端形态学参数。
93.二、应用实施例。为了证明本发明的技术方案的创造性和技术价值,该部分是对权利要求技术方案进行具体产品上或相关技术上的应用的应用实施例。
94.本发明实施例中的辅助肱骨近端骨折复位的解剖型人工骨在肱骨近端骨折复位中的应用。
95.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
96.应当注意,本发明的实施方式可以通过硬件、软件或者软件和硬件的结合来实现。硬件部分可以利用专用逻辑来实现;软件部分可以存储在存储器中,由适当的指令执行系统,例如微处理器或者专用设计硬件来执行。本领域的普通技术人员可以理解上述的设备和方法可以使用计算机可执行指令和/或包含在处理器控制代码中来实现,例如在诸如磁盘、cd或dvd-rom的载体介质、诸如只读存储器(固件)的可编程的存储器或者诸如光学或电子信号载体的数据载体上提供了这样的代码。本发明的设备及其模块可以由诸如超大规模集成电路或门阵列、诸如逻辑芯片、晶体管等的半导体、或者诸如现场可编程门阵列、可编程逻辑设备等的可编程硬件设备的硬件电路实现,也可以用由各种类型的处理器执行的软件实现,也可以由上述硬件电路和软件的结合例如固件来实现。
97.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1