一种三维动态力反馈训练装置的制作方法
1.本发明涉及肢体训练设备技术领域,具体涉及一种三维动态力反馈训练装置。
背景技术:
2.对于肢体有障碍的患者而言,康复训练是消除或者缓解肢体障碍一个重要的环节,康复训练的主要目的是使患者的肢体关节得到活动,逐渐恢复与肢体活动相关的肌肉和神经的功能。肢体训练设备通常采用电机驱动的方式,带动患者的肢体进行主动训练或被动训练,使患者的肢体关节得到活动。
3.现有的康复训练装置往往只能带动患者的肢体在预定的活动线路上运动,难以根据患者的实际情况和其肢体的具体状况调整运动路线,不仅难以对患者特定的肢体关节进行有效的训练,甚至可能对患者肢体造成损伤;而且也无法动态的调整患者肢体在运动不同位置处的施力,不能对患者的特定关节进行有目的性的训练;从而无法达到令患者满意的康复训练效果,患者在康复训练过程中的满意度也不高。
4.因此,设计一种可以根据患者肢体的特定关节设计特定的运动路线并可以根据患者的实际需求精确的调整在该运动路线上每个位置对患者的施力的训练装置,是现阶段肢体康复训练装置生产企业亟待解决的一个问题。
技术实现要素:
5.对于现有技术中所存在的问题,本发明提供的一种三维动态力反馈训练装置,利用可转动的转动座、转动台和第二转动臂,可以带动手臂定位组件在空间内沿某一运动路线运动,并且可以通过调整第一驱动组件、第二驱动组件和第三驱动组件的输出扭矩可以控制手臂定位组件在运动过程中对患者肢体的施力,从而可以根据患者的实际需求进行最优的肢体训练,有效的保证了患者肢体的康复训练效果。
6.为了实现上述目的,本发明采用的技术方案如下:
7.一种三维动态力反馈训练装置,包括:
8.支撑架,所述支撑架上设有第一驱动组件和第二驱动组件;
9.转动座,所述转动座可转动的设于所述支撑架上,所述转动座可以第一轴线为轴转动,所述转动座上设有第一传动台,所述第一传动台与所述第一驱动组件传动连接;所述转动座上设有第三驱动组件;
10.转动台,所述转动台可转动的设于所述转动座上,所述转动台可以第二轴线为轴转动,所述转动台上设有第二传动台,所述第二传动台与所述第二驱动组件传动连接;所述第二轴线与所述第一轴线垂直;所述转动台远离所述转动座的一端设有第一摆动臂;
11.第二摆动臂,所述第二摆动臂与所述第一摆动臂远离所述转动台的一端转动连接,所述第二摆动臂可以第三轴线为轴转动,所述第二摆动臂上设有第三传动台,所述第三传动台与所述第三驱动组件传动连接;
12.手臂定位组件,所述手臂定位组件设于所述第二摆动臂远离所述第一摆动臂的一
端。
13.作为一种优选的技术方案,所述第一驱动组件、所述第二驱动组件和所述第三驱动组件均设为伺服电机。
14.作为一种优选的技术方案,所述支撑架和所述转动座之间通过轴承转动连接;和/或,所述转动座与所述转动台之间通过轴承转动连接;和/或,所述第一摆动臂与所述第二摆动臂之间通过轴承转动连接。
15.作为一种优选的技术方案,所述第一轴线水平设置;和/或,所述第二轴线与所述第三轴线平行设置。
16.作为一种优选的技术方案,所述第一传动台与所述第一驱动组件之间通过第一钢丝绳传动连接。
17.作为一种优选的技术方案,所述转动座上设有与所述转动座转动连接的第四传动台,所述第四传动台可以第四轴线为轴转动,所述第四传动台上具有第一台阶和第二台阶,所述第一台阶与所述第二驱动组件之间通过第二钢丝绳传动连接,所述第二台阶与所述第二传动台之间通过第三钢丝绳传动连接。
18.作为一种优选的技术方案,所述第四轴线与所述第二轴线垂直。
19.作为一种优选的技术方案,所述转动台中空设置,所述转动台内设有转动轴;所述第三驱动组件设于所述转动座与所述转动台相对的一侧,所述转动轴的一端与所述第三驱动组件连接,所述转动轴的另一端与所述第三传动台之间通过第四钢丝绳传动连接。
20.作为一种优选的技术方案,所述第一摆动臂中空设置,所述第四钢丝绳从所述第一摆动臂中穿过。
21.作为一种优选的技术方案,所述手臂定位组件包括连接座,所述连接座上设有定位部和承托部,所述连接座与所述第二摆动臂固定连接,所述承托部与所述连接座转动连接。
22.本发明的有益效果表现在:
23.本发明利用可转动的转动座、转动台和第二转动臂,可以带动手臂定位组件在空间内沿某一运动路线运动,并且可以通过调整第一驱动组件、第二驱动组件和第三驱动组件的输出扭矩可以控制手臂定位组件在运动过程中对患者肢体的施力,从而可以根据患者的实际需求进行最优的肢体训练,有效的保证了患者肢体的康复训练效果。
附图说明
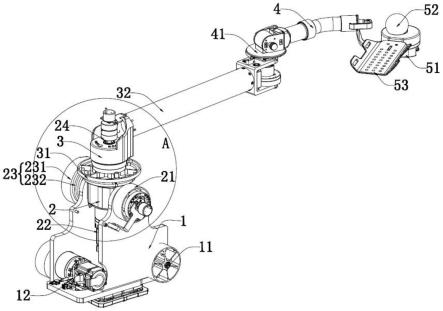
24.图1为本发明一种三维动态力反馈训练装置的一种实施例的整体结构图;
25.图2为图1中a区域的放大图。
26.图中:1-支撑架、11-第一驱动组件、12-第二驱动组件、2-转动座、21-第一传动台、22
‑ꢀ
第三驱动组件、23-第四传动台、231-第一台阶、232-第二台阶、24-转动轴、3-转动台、31
‑ꢀ
第二传动台、32-第一摆动臂、4-第二摆动臂、41-第三传动台、51-连接座、52-定位部、53
‑ꢀ
承托部。
具体实施方式
27.为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
28.请参照图1-图2,为本发明一种三维动态力反馈训练装置的一种实施例,包括:
29.支撑架1,支撑架1上设有第一驱动组件11和第二驱动组件12;
30.转动座2,转动座2可转动的设于支撑架1上,转动座2可以第一轴线为轴转动,转动座2上设有第一传动台21,第一传动台21与第一驱动组件11传动连接,第一驱动组件11 可以通过驱动第一传动台21转动从而带动转动座2转动;转动座2上设有第三驱动组件22;
31.转动台3,转动台3可转动的设于转动座2上,转动台3可以第二轴线为轴转动,转动台3上设有第二传动台31,第二传动台31与第二驱动组件12传动连接,第二驱动组件12 可以通过驱动第二传动台31转动从而带动转动台3转动;第二轴线与第一轴线垂直;转动台 3远离转动座2的一端设有第一摆动臂32,当转动台3转动时,可以带动第一摆动臂32摆动;
32.第二摆动臂4,第二摆动臂4与第一摆动臂32远离转动台3的一端转动连接,第二摆动臂4可以第三轴线为轴转动,第二摆动臂4上设有第三传动台41,第三传动台41与第三驱动组件22传动连接,第三驱动组件22可以通过驱动第三传动台41转动从而带动第二摆动臂 4摆动;
33.手臂定位组件,手臂定位组件设于第二摆动臂4远离第一摆动臂32的一端,患者的上肢可以固定在手臂定位组件上,当转动座2转动、第一摆动臂32摆动和第二摆动臂4摆动时,均会带动手臂定位组件在三维空间内移动,从而带动患者上肢进行康复训练。
34.需要说明的,第一驱动组件11、第二驱动组件12和第三驱动组件22均优选的设为伺服电机,具体的,伺服电机在控制器的控制下可以实时的调整转速和输出扭矩,从而可以有效地调整手臂定位组件的移动路线和在移动时对患者肢体的施力大小。
35.需要说明的,支撑架1和转动座2之间优选的通过轴承转动连接,使转动座2可转动的设于支撑架1上;同理的,转动座2与转动台3之间也优选的通过轴承转动连接,使转动台 3可转动的设于转动座2上;进一步的,第一摆动臂32与第二摆动臂4之间也可以通过轴承转动连接,使第二摆动臂4可转动的设于第一摆动臂32上。
36.需要说明的,请参照图1,第一轴线优选的水平设置,使得转动座2转动时,转动台3 在以竖直面内转动,支撑架1可以稳定的支撑转动座2;优选的,第二轴线与第三轴线可以平行设置,第一摆动臂32和第二摆动臂4同时摆动时,可以有效地控制手臂定位组件的摆动速度和摆动幅度。
37.在本实施例中,请参照图1,第一传动台21与第一驱动组件11之间优选的通过第一钢丝绳传动连接,绳传动的方式噪音更小,进一步的,第一钢丝绳在第一传动台21和第一驱动组件11的输出轴上均反复缠绕数圈,第一传动台21和第一驱动组件11的输出轴上均应设有固定第一钢丝绳端部的凹槽。
38.在本实施例中,请参照图1和图2,转动座2上设有与转动座2转动连接的第四传动台 23,第四传动台23可以第四轴线为轴转动,第四传动台23上具有第一台阶231和第二台阶 232,第一台阶231与第二驱动组件12之间通过第二钢丝绳传动连接,第二台阶232与第二传动台31之间通过第三钢丝绳传动连接,第四传动台23在第二驱动组件12与第二传动台 31的传动连接中起到中转的作用;优选的,第四轴线与第二轴线垂直,可以保证第二驱动组件12可以水平的设置在支撑架1上,可以降低第二驱动组件12的占用空间,避免第二驱动组件12妨碍第一摆动臂32的摆动。
39.在本实施例中,请参照图1和图2,转动台3中空设置,转动台3内设有转动轴24;第
三驱动组件22设于转动座2与转动台3相对的一侧,转动轴24的一端与第三驱动组件22连接,第三驱动组件22可以驱动转动轴24转动;转动轴24的另一端与第三传动台41之间通过第四钢丝绳传动连接,转动轴24转动时可以带动第三传动台41转动;进一步的,第一摆动臂32中空设置,第四钢丝绳从第一摆动臂32中穿过,使得第四钢丝绳不会裸露在外部,提高了本发明使用时的安全性和美观性。
40.在本实施例中,请参照图1,手臂定位组件包括连接座51,连接座51上设有定位部52 和承托部53,定位部52用于患者手部抓握,从而定位患者肢体,承托部53用于承托患者的肢体;连接座51与第二摆动臂4固定连接,承托部53与连接座51转动连接,当患者肢体定位于手臂定位组件上时,可以跟随第二摆动臂4移动,同时,承托部53可以随之绕连接座51转动,保证实时的承托患者肢体。
41.需要说明的,第一钢丝绳、第二钢丝绳和第四钢丝绳均优选的呈“8”字形设置,在保证传动稳定的同时,可以降低第一钢丝绳、第二钢丝绳、第三钢丝绳和第四钢丝绳的占用空间。
42.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1