一种电子面弓角度精度测试方法与流程
本发明属于测试以及口腔医疗器械领域,具体涉及一种电子面弓角度精度测试方法。
背景技术:
1、电子面弓是一套精确的牙齿咬合跟踪定位装置,可记录下颌运动轨迹,描述髁突变化数据,同时配合数字化cad/cam系统,为数字化治疗流程提供动态数据,有效降低临床调颌工作时间。
2、电子面弓由发射器及支架、下颌叉及接收器和系统主机三部分组成,发射器及支架安装到人头部,上电后在人头部周围产生稳定的磁场,接收器通过下颌叉安装到人头部下颌上,用于感应空间磁场,系统主机用于姿态解算及输出数据。正常工作时,佩戴有下颌叉的病人做下颌的前伸运动、后退运动、左侧方运动、右侧方运动、大开口运动,接收器感应运动过程中的磁场,系统主机通过解算得到运动轨迹,然后计算该运动轨迹与参考平面的夹角,最终输出该角度用于口腔义齿修复等。
3、电子面弓设备在进行测量角度精度评估时,通常人为指定参考平面,测量轨迹与参考平面之间的夹角随着参考平面的不同,其得到的角度也不同,测试人员无法很准确的控制参考平面的位置,所述电子面弓在实际工作过程中的测角精度很难精确测试,无法满足测试要求,所以依靠现有方法无法完成对电子面弓角度测试的检测筛选。
技术实现思路
1、鉴于上述的分析,本发明旨在公开了一种电子面弓角度精度测试方法,用于解决电子面弓角度的测试问题。
2、本发明公开了一种电子面弓角度精度测试方法,包括:
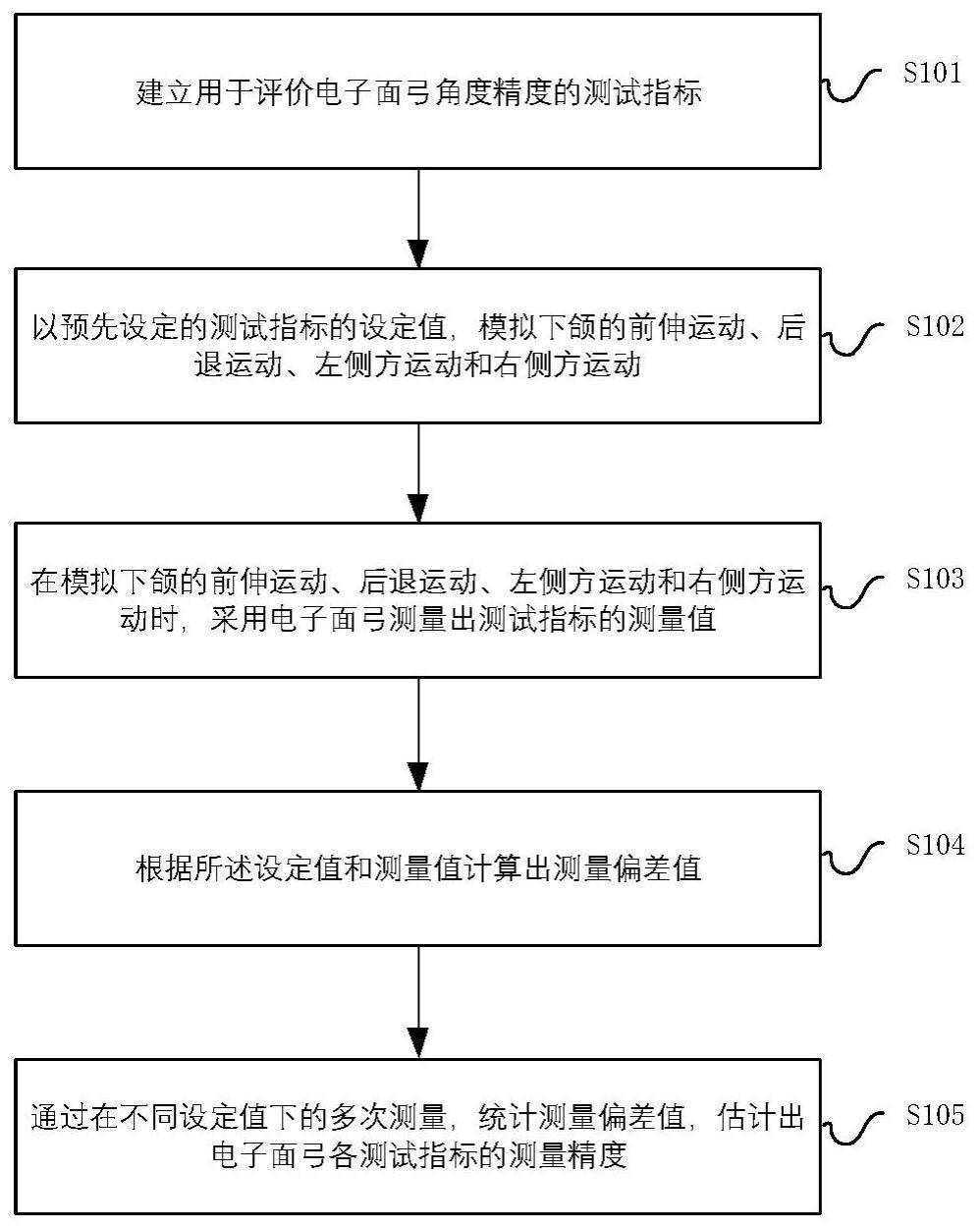
3、建立用于评价电子面弓角度精度的测试指标;
4、所述测试指标包括前伸切导斜度、左侧方切导斜度、右侧方切导斜度、左髁突前伸髁导斜度、左髁突左侧方髁导斜度、右髁突前伸髁导斜度和右髁突右侧方髁导斜度;
5、以预先设定的测试指标的设定值,模拟下颌的前伸运动、后退运动、左侧方运动和右侧方运动;
6、在模拟下颌的前伸运动、后退运动、左侧方运动和右侧方运动时,采用电子面弓测量出测试指标的测量值;
7、根据所述设定值和测量值计算出测量偏差值;
8、通过在不同设定值下的多次测量,统计测量偏差值,估计出电子面弓各测试指标的测量精度。
9、进一步地,在模拟下颌的前伸运动或后退运动时,测试的电子面弓的精度指标包括前伸切导斜度、左髁突前伸髁导斜度和右髁突前伸髁导斜度;
10、在模拟下颌的左侧方运动时,测试的电子面弓的精度指标包括左侧方切导斜度和左髁突左侧方髁导斜度;
11、在模拟下颌的右侧方运动时,测试的电子面弓的精度指标包括右侧方切导斜度和右髁突右侧方髁导斜度。
12、进一步地,在模拟下颌的前伸运动、后退运动、左侧或右侧方运动时的测量过程中,电子面弓的发射器与下颌的位置保持位置不变,电子面弓的接收器跟随上颌运动,与模拟的切导,左、右髁突位置相对固定。
13、进一步地,在模拟下颌前伸运动或后退运动中的测试过程包括:
14、前伸运动或后退运动时,计算接收器在发射器坐标系内的坐标值;
15、进行坐标转换,计算出模拟的切导在下颌坐标系内位置坐标,左髁突、右髁突在上颌坐标系内坐标;
16、绘制前伸运动或后退运动时,模拟的切导在下颌坐标系内的轨迹,模拟的左髁突、右髁突在上颌坐标系内的轨迹;
17、根据切导在下颌坐标系内的轨迹、左髁突、右髁突在上颌坐标系内的轨迹,计算前伸切导斜度、左髁突前伸髁导斜度和右髁突前伸髁导斜度的测量值(f)θq、(f)θlc和(f)θrc。
18、进一步地,切导在下颌坐标系内坐标为为发射器到下颌的变换矩阵,为接收器到切导的变换矩阵;前伸运动接收器在发射器坐标系内坐标为
19、左髁突在上颌坐标系内坐标为
20、右髁突在上颌坐标系内坐标为
21、其中,为接收器到模拟的左髁突的变换矩阵,为接收器到模拟的右髁突的变换矩阵,为模拟的左髁突到上颌的变换矩阵,为模拟的右髁突到上颌的变换矩阵。
22、进一步地,在模拟下颌左侧方运动或右侧方运动中的测试过程包括:
23、左侧方运动或右侧方运动时,计算接收器在发射器坐标系内的坐标值;
24、进行坐标转换,计算出切导在下颌坐标系内位置坐标,左髁突或右髁突在上颌坐标系内坐标;
25、左侧方运动时,绘制切导在下颌坐标系内的轨迹曲线,左髁突在上颌坐标系内的轨迹曲线;
26、根据左侧方运动的切导轨迹确定出左侧方切导斜度的测量值(l)θq;根据左侧方运动的左髁突轨迹确定出左髁突左侧方髁导斜度的测量值(l)θlc;
27、右侧方运动时,绘制切导在下颌坐标系内的轨迹曲线,右髁突在上颌坐标系内的轨迹曲线;
28、根据右侧方运动的切导轨迹确定出右侧方切导斜度的测量值(r)θq;根据右侧方运动的右髁突轨迹确定出右髁突右侧方髁导斜度的测量值(r)θrc。
29、进一步地,左侧方运动时,
30、切导在下颌坐标系内位置坐标其中,为发射器到下颌的变换矩阵,为接收器到切导的变换矩阵;接收器在发射器坐标系内坐标为
31、左髁突在上颌坐标系内坐标为为左髁突到上颌的变换矩阵,为接收器到左髁突的变换矩阵;
32、右侧方运动时,
33、切导在下颌坐标系内位置坐标为接收器到切导的变换矩阵,为发射器到下颌的变换矩阵;接收器在发射器坐标系内坐标为
34、右髁突在上颌坐标系内坐标为接收器到右髁突的变换矩阵,为右髁突到上颌的变换矩阵。
35、进一步地,通过在不同设定值下的多次测量,统计测量偏差值,估计出电子面弓各测试指标的测量精度,包括:将统计测试指标中每个角度的角度偏差序列的2σ值设定为该角度的测量精度;σ为均方根值。
36、进一步地,使用医用颌架进行模拟下颌的前伸运动、后退运动、左侧方运动和右侧方运动;
37、将电子面弓的发射器与所述医用颌架固定在同一平面上;将电子面弓的接收器通过工装与所述医用颌架的上颌体刚性连接,使接收器跟随上颌体一起运动;通过电子面弓对随上颌体运动的接收器的测量,通过坐标转换实现对模拟的下颌的前伸运动、后退运动、左侧方运动和右侧方运动的测量。
38、进一步地,在使用医用颌架进行精度测试前,利用所述医用颌架进行接收器的参数标定;具体包括:
39、锁定颌架正中轴,抬起颌架上绕正中轴旋转一定的角度范围;记录旋转过程中接收器位姿数据序列;
40、根据接收器位姿数据序列以及接收器与颌架左髁突、右髁突的相对位姿关系,计算出颌架左髁突、右髁突在发射器坐标系下的坐标序列;
41、使用最优化方法对坐标序列进行修正,使修正后的左髁突、右髁突在旋转过程中计算得到的欧氏距离与颌架上结构限位得到的欧氏距离的偏差小于偏差阈值;在修正过程中,获取接收器在发射器坐标系内的位姿修正量,构成用于标定接收器位姿参数的修正系数矩阵。
42、本发明可实现以下有益效果:
43、本发明的电子面弓角度精度测试方法,通过模拟人头部下颌运动实现轨迹测量,最终通过统计方法评估测角精度,实现了电子面弓角度精度测试,且测试过程高效可靠。
- 还没有人留言评论。精彩留言会获得点赞!