机器人的位置布局方法、装置、系统和存储介质与流程
本技术涉及医疗,特别是涉及一种机器人的位置布局方法、装置、系统和存储介质。
背景技术:
1、目前,为保证机器人手术的顺利开展需要合理的设置手术机器人系统的术前工作条件,具体包括手术机器人布局,机械臂位姿调整,体位调整,打孔等。然而手术室内的空间非常局限,包含大量设备:手术机器人(主控制台车、患者台车、图像台车及病床),其他设备(呼吸机、器械台车、无影灯、麻醉机)。
2、在实现过程中,发明人发现传统技术中至少存在如下问题:传统术前手术机器人的布局存在效率低的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够用于提高布局效率的机器人的位置布局方法、装置、系统和存储介质。
2、为了实现上述目的,一方面,本发明实施例提供了一种机器人的位置布局方法,包括步骤:
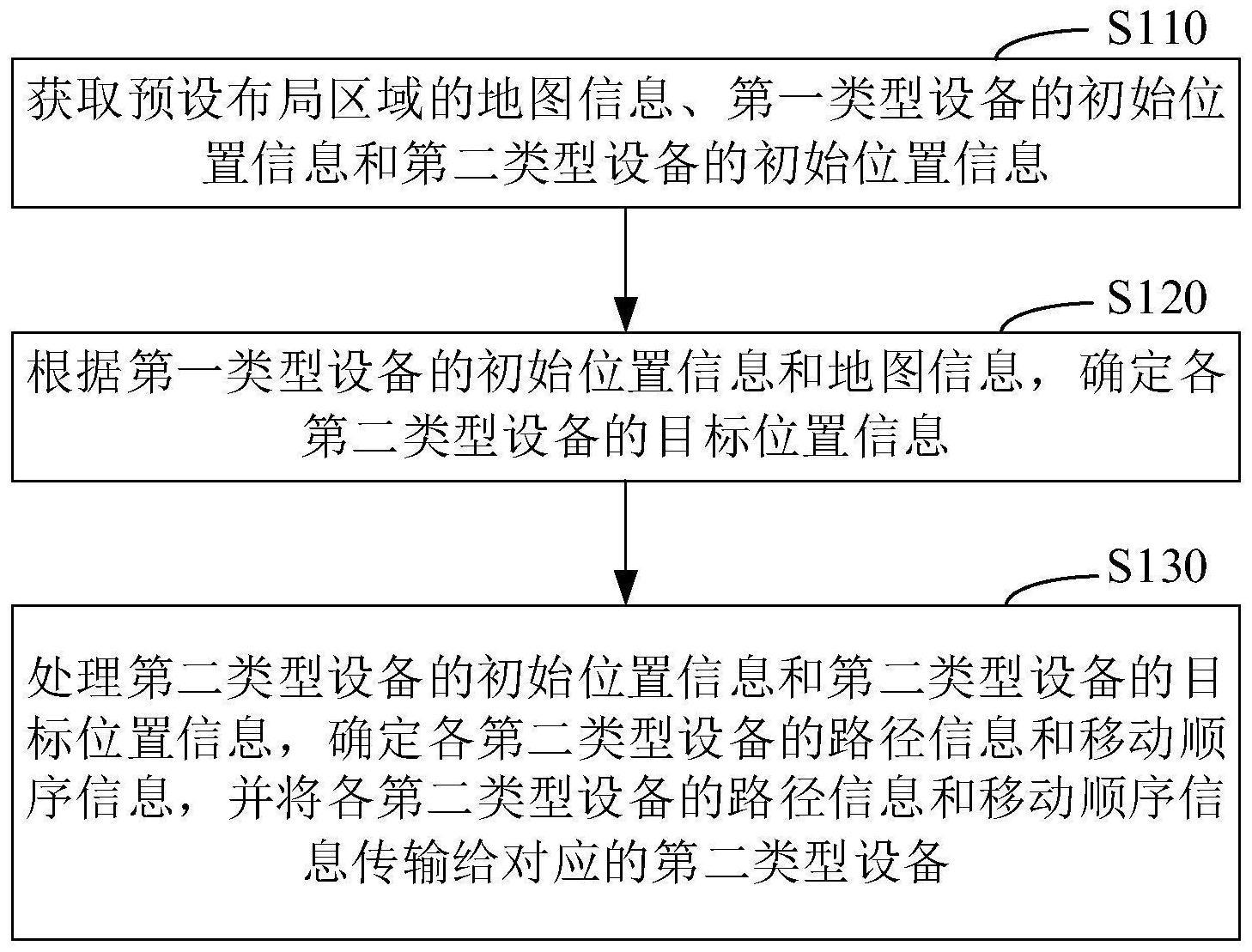
3、获取预设布局区域的地图信息、第一类型设备的初始位置信息和第二类型设备的初始位置信息;
4、根据第一类型设备的初始位置信息和地图信息,确定各第二类型设备的目标位置信息;
5、处理第二类型设备的初始位置信息和第二类型设备的目标位置信息,确定各第二类型设备的路径信息和移动顺序信息,并将各第二类型设备的路径信息和移动顺序信息传输给对应的第二类型设备。
6、在其中一个实施例中,获取第一类型设备的初始位置信息的步骤,包括:
7、获取预设布局区域中各第一类型设备与预设位置的距离信息;
8、根据各距离信息和对应的第一类型设备的类型,生成各第一类型设备的初始位置信息。
9、在其中一个实施例中,获取预设布局区域中各第一类型设备与预设位置的距离信息的步骤,包括:
10、获取第一摄像设备采集到的第一图像以及第二摄像设备采集到的第二图像;
11、根据第一图像和第二图像,获取预设布局区域中各第一类型设备与第一摄像设备的第一距离信息,和各第一类型设备与第二摄像设备的第二距离信息。
12、在其中一个实施例中,还包括步骤:
13、将第二类型设备的图像信息进行标记,得到训练样本数据;
14、采用训练样本数据对待训练的神经网络模型进行预训练,得到目标神经网络模型;
15、获取物体的图片并输入目标神经网络模型,并根据目标神经网络模型的输出结果,得到第二类型设备的信息。
16、在其中一个实施例中,第二类型设备包括病床设备、图像台车、患者台车和主控制台车;
17、确定各第二类型设备的目标位置信息的步骤,包括:
18、获取外部输入的病床设备的目标位置信息;
19、将病床设备的第一侧位置确定为患者台车的目标位置信息;
20、将病床设备的第二侧位置确定为图像台车的目标位置信息;
21、将病床设备与图像台车连线的垂线上的预设位置,确定为主控制台车的目标位置信息;其中,垂线穿过病床设备与图像台车的中心点。
22、在其中一个实施例中,还包括步骤:
23、根据各路径信息中的交叉路径和/或各第二类型设备的所占空间,确定各第二类型设备的移动顺序信息。
24、在其中一个实施例中,还包括步骤:
25、根据各第二类型设备间的移动障碍关系,确定各第二类型设备的移动顺序信息;其中,移动障碍关系为根据任一第二类型设备到达对应的目标位置时,对各路径信息的干涉状态确定。
26、在其中一个实施例中,还包括步骤:
27、根据外部输入的各第一类型设备的初始位置信息,将各第一类型设备移动至初始位置信息表征的位置上。
28、在其中一个实施例中,还包括步骤:
29、检测到各第二类型设备到达对应的目标位置,控制各第二类型设备进行姿态调整动作。
30、一方面,本发明实施例还提供了一种机器人的位置布局装置,包括:
31、获取模块,用于获取预设布局区域的地图信息、第一类型设备的初始位置信息和第二类型设备的初始位置信息;
32、位置确定模块,用于根据第一类型设备的初始位置信息和地图信息,确定各第二类型设备的目标位置信息;
33、移动模块,用于处理第二类型设备的初始位置信息和第二类型设备的目标位置信息,确定各第二类型设备的路径信息和移动顺序信息,并将各第二类型设备的路径信息和移动顺序信息传输给对应的第二类型设备。
34、在其中一个实施例中,获取模块包括:
35、距离信息采集模块,用于获取预设布局区域中各第一类型设备与预设位置的距离信息;
36、位置信息获取模块,用于根据各距离信息和对应的第一类型设备的类型,生成各第一类型设备的初始位置信息。
37、在其中一个实施例中,距离信息采集模块还用于获取第一摄像设备采集到的第一图像以及第二摄像设备采集到的第二图像;且根据第一图像和第二图像,获取预设布局区域中各第一类型设备与第一摄像设备的第一距离信息,和各第一类型设备与第二摄像设备的第二距离信息。
38、在其中一个实施例中,机器人的位置布局装置还包括:
39、标记模块,用于将第二类型设备的图像信息进行标记,得到训练样本数据;
40、预训练模块,用于采用训练样本数据对待训练的神经网络模型进行预训练,得到目标神经网络模型;
41、结果输出模块,用于获取物体的图片并输入目标神经网络模型,并根据目标神经网络模型的输出结果,得到各第二类型设备的信息。
42、在其中一个实施例中,第二类型设备包括病床设备、图像台车、患者台车和主控制台车;
43、位置确定模块,包括:
44、病床设备的位置获取模块,用于获取外部输入的病床设备的目标位置信息;
45、患者台车的位置确定模块,用于将病床设备的第一侧位置确定为患者台车的目标位置信息;
46、图像台车的位置确定模块,用于将病床设备的第二侧位置确定为图像台车的目标位置信息;
47、主控制台车的位置确定模块,用于将病床设备与图像台车连线的垂线上的预设位置,确定为主控制台车的目标位置信息;其中,垂线穿过病床设备与图像台车的中心点。
48、在其中一个实施例中,位置信息获取模块还用于根据各路径信息中的交叉路径和/或各第二类型设备的所占空间,确定各第二类型设备的移动顺序信息。
49、在其中一个实施例中,位置信息获取模块还用于根据各第二类型设备间的移动障碍关系,确定各第二类型设备的移动顺序信息;其中,移动障碍关系为根据任一第二类型设备到达对应的目标位置时,对各路径信息的干涉状态确定。
50、在其中一个实施例中,机器人的位置布局装置还包括:
51、位置调整模块,用于根据外部输入的各第一类型设备的初始位置信息,将各第一类型设备移动至初始位置信息表征的位置上。
52、在其中一个实施例中,机器人的位置布局装置还包括:
53、姿态调整模块,用于检测到各第二类型设备到达对应的目标位置,控制各第二类型设备进行姿态调整动作。
54、一方面,本发明实施例还提供了一种机器人的控制系统,包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现上述任一项方法的步骤。
55、另一方面,本发明实施例还提供了计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现上述任一项方法的步骤。
56、上述技术方案中的一个技术方案具有如下优点和有益效果:
57、上述机器人的位置布局方法,通过获取预设布局区域的地图信息、第一类型设备的初始位置信息和第二类型设备的初始位置信息,并确定第二类型设备的路径信息和移动顺序信息,可以实现在预设布局区域的自动布局。对于手术室布局而言,可以提高术前准备效率,同时通过设备的自动布局,避免人工操作过程中的设备之间碰撞的可能,降低损坏率。通过自动布局,也可以降低对医护人员术前调整经验的要求。
- 还没有人留言评论。精彩留言会获得点赞!