一种下肢外骨骼随动支撑设备控制系统
1.本发明涉及下肢外骨骼技术领域,具体为一种下肢外骨骼随动支撑设备控制系统。
背景技术:
2.申请号201910392626.4“一种移动式下肢外骨骼康复机器人及其控制系统”,所述机器人包括移动机器人、下肢外骨骼机器人、减重装置,其中,所述移动机器人底架上安装有两个驱动轮,四个从动轮,所述外骨骼机器人安装于移动机器人龙门架的内侧,其与移动机器人通过螺栓或其它连接装置连接;所移动机器人上端两侧设有减重装置;所述控制系统,包括下肢外骨骼机器人控制系统、移动机器人控制系统、数据终端,本发明可通过操作数据终端的显示屏设置相应的运动模式和训练参数。
3.申请号201911373725.4“一种可分离多用途下肢外骨骼机器人”,包括活动连接的移动护架装置和外骨骼装置;外骨骼装置包括依次连接的腰部连接机构、大腿连接机构、小腿连接机构和足底支撑机构;腰部连接机构内设置有用于控制的控制箱,控制箱通过线缆分别与大腿连接机构、小腿连接机构电性连接;本发明通过外骨骼装置活动连接在移动护架装置,该外骨骼装置可单独作用,也可以安装在移动护架装置,从而方便可独立行走的患者和不可独立行走的患者进行康复练习,外骨骼装置可以带动患者的大腿和小腿进行康复训练,有助于患者快速康复。
4.申请号201910067601.7“一种随动式下肢步态训练康复机器人系统”,分为下肢可穿戴外骨骼机器人和随动机器人。整个系统包括随动机器人的两个平移自由度、两个垂直减重自由度和可穿戴机器人的双腿髋膝六个旋转自由度。下肢可穿戴外骨骼机器人固定在病人的下肢和腰部,根据患者的步态提供行走助力,帮助患者完成行走动作;随动机器人和下肢可穿戴外骨骼机器人相连,起到支撑患者和减重的作用,并且根据病人的行走实现相应的跟随移动。本发明主要针对性地解决中枢神经损伤后所导致的各种下肢运动功能障碍,为使用者提供安全化、长效化,大范围的步态训练并提高患者下肢康复训练的效率。
5.上述的下肢外骨骼调试及试验,通常采用悬挂离地的方式或拖拽支架的方式进行,步态和行走数据难以完全真实的模拟实地行走情况。直接穿戴仍在测试阶段的下肢外骨骼下地行走试验或训练,对试验人员存在一定的风险,稍有不慎,容易造成人员受伤和设备损坏。拖拽随动的轮式支架,可协助下肢外骨骼完成康复训练的功能,但外骨骼在行走过程中,腰部的摆动起伏收到支架约束,对试验数据采集,仍有影响。
技术实现要素:
6.为了解决上述技术问题,本发明提出了一种下肢外骨骼随动支撑设备控制系统。
7.本发明所要解决的技术问题采用以下技术方案来实现:
8.一种下肢外骨骼随动支撑设备控制系统,包括下肢外骨骼随动支撑设备,所述下肢外骨骼随动支撑设备包括可移动的设备支架、设置在设备支架上的下肢外骨骼、用于控
制设备支架移动的伺服驱动马达、用于控制下肢外骨骼升降的升降电缸,与所述伺服驱动马达连接的电磁离合器;还包括:
9.运动控制模块,通过线缆与所述电磁离合器、伺服驱动马达、升降电缸连接,用以控制所述设备支架、下肢外骨骼进行相应运动;
10.人机交互模块,包括多种运动模式,与所述运动控制模块通过网线连接、can通讯,用以显示设备运行状态,并可选择运动模式,自动控制所述下肢外骨骼随动支撑设备运动;
11.手持遥控模块,与所述运动控制模块通过无线连接、can通讯,用以手动控制所述设备支架、下肢外骨骼进行相应运动;
12.激光导航模块,与所述运动控制模块通过网线连接、can通讯,自带算力,用以帮助所述设备支架进行运动导航。
13.优选地,所述运动控制模块控制所述电磁离合器的得失电、控制所述伺服驱动马达的转速、控制所述升降电缸的伸缩。
14.优选地,所述人机交互模块为触摸显示屏,包括移动运动模式、升降运动模式、跟随运动模式。
15.优选地,所述移动运动模式包括自动移动和手动移动。
16.优选地,所述跟随运动模式包括自动跟随和被动跟随。
17.优选地,所述手持遥控模块为手持式无线遥控器。
18.优选地,所述激光导航模块为激光雷达,所述激光雷达设置在所述设备支架的顶部。
19.优选地,所述下肢外骨骼随动支撑设备还包括设置在所述设备支架底部的主动轮、万向轮,所述电磁离合器与所述主动轮连接。
20.优选地,所述下肢外骨骼随动支撑设备还包括设置在所述设备支架上的升降导轨、设置在所述升降导轨上的升降滑块、设置在所述升降滑块上且与所述升降电缸连接的升降支架,所述升降支架上设有浮动式连接组件,所述下肢外骨骼通过外骨骼腰带与所述浮动式连接组件连接。
21.优选地,所述浮动式连接组件包括设置在所述升降支架上的浮动导轨、滑动安装在所述浮动导轨上的浮动滑块、安装在所述浮动滑块上的转接板、连接在所述浮动导轨上端的导轨上限位板、连接在所述浮动导轨下端的导轨下限位板,所述外骨骼腰带固定连接在所述转接板上。
22.本发明的有益效果是:
23.本发明能够在试验的初始阶段,对下肢外骨骼进行支撑悬挂,帮助测试外骨骼和人体的各项数据;在需要下地试验时,可以将外骨骼下降放置于地面,通过随动的方式对外骨骼提供支撑,完成普通的下肢训练。当需要精确采集行走信息时,本发明的下肢外骨骼随动支撑设备可通过激光跟随导航的方式,跟随外骨骼行进,提供实时支撑保护,避免了拖拽支架造成数据影响的同时,最大可能的保护了试验人员和设备的安全;能最大程度的模拟外骨骼实际行走状况,保证了外骨骼数据的真实、可信。
附图说明
24.下面结合附图和实施例对本发明进一步说明:
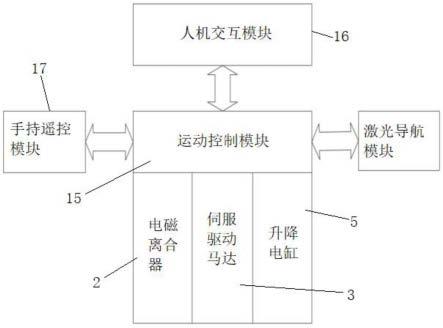
25.图1为本发明的结构框图;
26.图2为本发明的使用流程图;
27.图3为本发明中下肢外骨骼随动支撑设备的结构示意图;
28.图4为本发明中下肢外骨骼随动支撑设备的后视结构示意图。
29.图中:1、主动轮;2、电磁离合器;3、伺服驱动马达;4、设备支架;5、升降电缸;6、扶手支架;7、激光雷达;8、升降导轨;9、升降滑块;10、升降支架;1001、转接板;1002、浮动滑块;1003、浮动导轨;1004、导轨上限位板;1005、导轨下限位板;11、支架扶手;12、外骨骼腰带;13、下肢外骨骼;14、万向轮;15、运动控制模块;16、人机交互模块;17、手持遥控模块。
具体实施方式
30.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合附图以及实施例对本发明进一步阐述。
31.如图1至图4所示,
32.一种下肢外骨骼随动支撑设备控制系统,由下肢外骨骼随动支撑设备、运动控制模块15、人机交互模块16、手持遥控模块17以及激光导航模块组成。
33.其中,所述下肢外骨骼随动支撑设备包括设备支架4、主动轮1、电磁离合器2、伺服驱动马达3、升降电缸5、升降导轨8、升降滑块9、升降支架10、外骨骼腰带12、下肢外骨骼13、万向轮14组成。所述主动轮1设有两个,对应安装在设备支架4的后端左右两侧,所述万向轮14设有两个,对应安装在设备支架4的前端左右两侧,所述电磁离合器2与主动轮1的轮轴连接,所述伺服驱动马达3设置在设备支架4的底部内侧架壁上,且通过电磁离合器2与主动轮1连接;所述升降电缸5竖直设置在设备支架4的底部中间处;进一步地,所述升降支架10的前端左右两侧处设有两个扶手支架6,两个扶手支架6上对应设有两个支架扶手11,所述支架扶手11用以提供平衡支撑和保护;所述升降导轨8设有两个,对称竖直安装在设备支架4的左右两侧内架壁上;所述升降滑块9设有两个,对应滑动安装在两个升降导轨8上;所述升降支架10的左右两侧对应固定连接在两个升降滑块9上,并且所述升降支架10的底部与所述升降电缸5连接;进一步地,所述升降支架10上设有浮动式连接组件,所述浮动式连接组件包括竖直分布在升降支架10中部的浮动导轨1003、滑动安装在浮动导轨1003上的浮动滑块1002,为了防止浮动滑块1002从浮动导轨1003上滑落,所述浮动导轨1003的上端部、下端部对应连接有导轨上限位板1004、导轨下限位板1005,所述浮动滑块1002上固定连接有转接板1001,所述外骨骼腰带12通过转接板1001连接在升降支架10上,所述下肢外骨骼13连接在外骨骼腰带12的下方,所述转接板1001、浮动滑块1002、浮动导轨1003、导轨上限位板1004、导轨下限位板1005共同构成了浮动式连接组件,所述浮动式连接组件提高了上下浮动行程,满足了下肢外骨骼13行走时腰部起伏的动作需要。
34.所述运动控制模块15通过控制线缆与电磁离合器2、伺服驱动马达3、升降电缸5连接,通过rs485通讯方式讯通,能通过控制电磁离合器2的得失电,从而控制下肢外骨骼随动支撑设备的主从动属性切换;通过与伺服驱动马达3的通讯,控制伺服驱动马达3的运动并读取伺服驱动马达3的运动状态,根据导航信息或手动命令信息,实时改变伺服驱动马达3的转速,从而完成对下肢外骨骼随动支撑设备的启停走转向等设置;通过控制升降电缸5的伸缩,完成下肢外骨骼13的升降。
35.所述人机交互模块16为触摸显示屏,与运动控制模块15采用网线连接,can通讯,可通过通讯显示下肢外骨骼随动支撑设备运行状态,并可由触摸屏对运动控制模块15下达运动命令,控制下肢外骨骼随动支撑设备运动;所述人机交互模块16包括多种运动模式,分别为移动运动模式、升降运动模式、跟随运动模式,其中移动运动模式包括自动移动和手动移动;跟随运动模式包括自动跟随和被动跟随。
36.所述手持遥控模块17为手持无线遥控器,与运动控制模块15通过无线通讯连接,采用can通讯,通过将控制命令与运动控制模块15通讯,控制下肢外骨骼随动支撑设备运行。
37.所述激光导航模块为激光雷达7,设置在设备支架4的顶部,所述激光导航模块与运动控制模块15采用网线连接,can通讯,激光雷达自带算力,可将扫描到的外骨骼位置信息与运动控制模块15通讯,帮助下肢外骨骼随动支撑设备完成运动导航。
38.使用时,根据人机交互模块16上控制界面的模式选择,下达相应控制指令。当下达移动指令时,分为手动移动和自动移动;手动移动时,手持无线遥控器直接对伺服驱动马达3下达转动指令,由人工完成下肢外骨骼随动支撑设备的移动;自动移动时,通过下肢外骨骼随动支撑设备顶端的激光雷达7完成下肢外骨骼随动支撑设备的定位和导航,通过系统规划路径,到达选择的预定位置。
39.当下达升降指令时,手持无线遥控器可通过控制升降电缸5的伸缩,带动升降支架10竖直升降,完成下肢外骨骼13随动升降支架10的升降动作,控制下肢外骨骼13的悬空与落地。
40.当下达跟随指令时,分为主动跟随和从动跟随;从动跟随时,运动控制模块15控制电磁离合器2电力断开,此时下肢外骨骼随动支撑设备可由下肢外骨骼13自由拖动行进;主动跟随时,开启激光雷达7,激光雷达7扫描前方并建立场景图像,通过程序的图形算法,确定下肢外骨骼13的位置后,运动控制模块15控制电磁离合器2得电,并控制伺服驱动马达3转动,使下肢外骨骼随动支撑设备进行行走或转向或停止,完成对下肢外骨骼13的紧密跟随,对实验中的下肢外骨骼13进行实时支撑保护。
41.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1