一种机器人固定弯鞘用控制装置的制作方法
1.本发明涉及医疗器械技术领域,特别是涉及一种机器人固定弯鞘用控制装置。
背景技术:
2.虽然射频消融术的方式多种多样,但无论采取哪种方式,都需要通过房内进行手术,首先需要利用鞘管在血管内构建进入心脏目标病灶位置的通道,消融导管穿过鞘管进入到目标消融位置并对目标病灶进行消融,因此,控制鞘管尖端的准确位置和方向的能力至关重要。传统鞘管需要术者手工操作鞘管,操作难度非常大,稳定性和精准性差,并且手工操作鞘管过程中由于医生疲劳及人员操作不稳定等因素,容易影响手术安全,特别是手术过程中心脏穿孔导致心包填塞,所以手工操控鞘管具有诸多不便和不安全性。
技术实现要素:
3.本发明提供了一种机器人固定弯鞘用控制装置,以解决现有技术中不能准确地控制鞘管的位置的问题。
4.本发明提供了一种机器人固定弯鞘用控制装置,该装置包括:所述控制装置包括:机械臂、鞘管、传动柄和鞘管支撑器,所述传动柄通过所述鞘管支撑器固定在所述机械臂上;所述鞘管包括固定弯段和硬质鞘管段,所述硬质鞘管段的一端嵌入在所述传动柄内,且所述硬质鞘管段的另一端与所述固定弯段的尾部相连接,导管通过所述硬质鞘管段和所述固定弯段的尾部,由所述固定弯段的头部伸出;所述传动柄上固定套设有第一锥形齿轮,所述机械臂通过所述鞘管支撑器实现对所述第一锥形齿轮运动的控制,并通过所述第一锥形齿轮的转动来带动所述传动柄及所述鞘管绕中心轴做周向转动,以改变所述鞘管的固定弯段的头部指向,使得导管头端达到目标消融位置实现消融操作。
5.可选地,所述鞘管支撑器上设有第二锥形齿轮,所述第二锥形齿轮与所述第一锥形齿轮相啮合,所述机械臂通过所述第二锥形齿轮实现对所述第一锥形齿轮运动的控制。
6.可选地,所述第二锥形齿轮内设有内齿轮,所述机械臂输出轴插入第二锥形齿轮内,且所述机械臂输出轴与所述第二锥形齿轮的内齿轮相啮合,所述机械臂通过带动所述第二锥形齿轮转动来控制所述第一锥形齿轮转动,以实现对所述鞘管的旋转控制。
7.可选地,所述鞘管的固定弯段上设有金属环,通过所述金属环来对所述鞘管的固定弯段的位置进行定位。
8.可选地,所述金属环为多个,其中,至少有一个金属环设置在所述固定弯段的头部,且至少嗨还有一个金属环设置在所述固定弯段与所述硬质鞘管段的连接处。
9.可选地,所述鞘管的固定弯段上设有电极环,通过所述电极环来对所述鞘管的固定弯段的位置进行定位。
10.可选地,所述电极环为多个,其中,至少有一个电极环设置在所述固定弯段的头部,且至少还有一个电极环设置在所述固定弯段与所述硬质鞘管段的连接处。
11.可选地,所述控制装置还包括控制器;所述控制器通过所述机械臂的前后移动来
带动所述鞘管的推送与后撤,进而带动所述导管的前后移动,且所述控制器通过所述机械臂来带动所述鞘管转动进而改变固定弯鞘管的头部的指向。
12.可选地,所述控制器包括控制终端和处理器;
13.所述控制终端,用于接收操作指令,并将影像设备采集的图像进行显示;
14.所述处理器,用于根据所述操作指令对所述鞘管、传动柄和所述机械臂进行控制。
15.可选地,所述鞘管包括鞘管壁和设置于所述鞘管壁内的导管通道,其中,所述导管通道设置在所述鞘管的中心位置;
16.且所述鞘管壁内嵌入有金属编织材料,以提高旋转保真度,所述鞘管内径为8.5fr,以适配8fr的消融导管,所述鞘管内置有止血阀。
17.本发明有益效果如下:
18.本发明通过控制机械臂来操控鞘管的打弯、旋转以及推送或后退,且通过锥形齿轮进行稳定传输,使术者能够精准的控制鞘管的动作,从而实现准确控制鞘管到达指定位置,进而减少手术时间,提高手术精度和手术质量。
19.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
附图说明
20.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
21.图1是本发明实施例提供的机械臂的结构示意图;
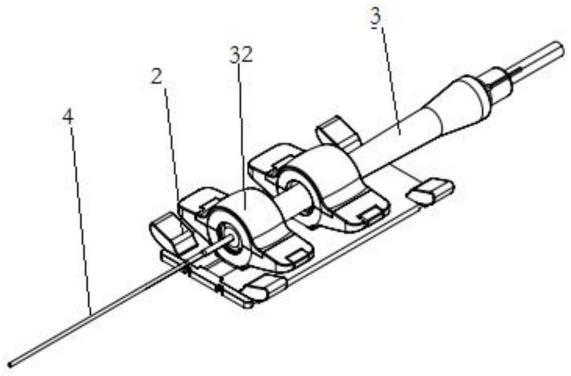
22.图2是本发明实施例提供的手柄的结构示意图;
23.图3是本发明实施例提供的第二锥形齿轮的结构示意图;
24.图4是本发明实施例提供的鞘管头端的结构示意图;
25.图5是本发明实施例提供的鞘管截面结构示意图;
26.图6是本发明实施例提供的控制装置的整体结构示意图;
27.图7是本发明实施例提供的控制装置信号控制示意图;
28.附图说明:1机械臂、2鞘管支撑器、3传动柄、4鞘管、5三通接头、6导管、7手术床、8处理器、9控制终端、10三维导航界面显示屏、11第二锥形齿轮、21第一锥形齿轮、22卡扣件、41固定弯段、42硬质鞘管段、43电极环、44金属编制网、45电极信号线、46导管通道。
具体实施方式
29.以下结合附图以及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不限定本发明。
30.在导管射频消融手术过程中,关键步骤是将射频消融导管通过长短不同的鞘管送至心腔内的目标位置。虽然机器人机械臂主要是通过三维标测系统的指引来控制鞘管的前后推送以及轴向旋转,但是现有鞘管的缺点是:需要通过术者手工把持鞘管的前后抽送和旋转,而这种凭感觉估算进行操作,明显不能对鞘管推送量和旋转量进行精准控制,所以手
术质量无法保证以及手术效率低下;另外,由于手术需要在x射线等影像设备的指引下进行,而传统鞘管需要术者手工操作,无法远程控制,因此手术过程中需要术者在x射线辐射下操作鞘管,长时间的手术会影响术者健康。再者,现有鞘管管体部分大多为塑料材质制作,由于鞘管管体一般都较长,医生通过鞘管传动柄3旋转鞘管时,在从鞘管传动柄3向远端传递扭矩的过程中,塑料材质管体会发生形变,导致所传递的扭矩失真,使术者很难掌控鞘管尖端的旋转量,不易操作且精准度不高。并且现有的鞘管大部分都没有可视功能,无法在手术的过程中实时监控鞘管的位置以及方向,只能凭术者的经验进行。
31.本发明实施例提供了一种机器人固定弯鞘用控制装置,参见图1和图2,本发明实施例所述控制装置包括有机械臂1、鞘管4、传动柄3和鞘管支撑器2,所述传动柄3通过所述鞘管支撑器2固定在所述机械臂1上;
32.所述鞘管4包括固定弯段41和硬质鞘管段42,所述硬质鞘管段42的一端嵌入在所述传动柄3内,且所述硬质鞘管段42的另一端与所述固定弯段41的尾部相连接,导管6通过所述硬质鞘管段42和所述固定弯段41的尾部,由所述固定弯段41的头部伸出;
33.所述传动柄3上固定套设有第一锥形齿轮21,所述机械臂1通过所述鞘管支撑器2实现对所述第一锥形齿轮21运动的控制,并通过所述第一锥形齿轮21的转动来带动所述传动柄3及所述鞘管4绕中心轴做周向转动,以改变所述鞘管4的固定弯段41的头部指向,使得导管6头端达到目标消融位置实现消融操作。
34.也就是说,本发明实施例是通过控制机械臂1来操控鞘管4的打弯、旋转以及推送或后退,且通过锥形齿轮进行稳定传输,最终使术者能够精准的控制鞘管的动作,从而实现准确控制鞘管到达指定位置,进而减少手术时间,提高手术精度和手术质量。
35.具体来说,本发明实施例中的鞘管支撑器2上设有第二锥形齿轮11,第二锥形齿轮11与第一锥形齿轮21相啮合,机械臂1通过第二锥形齿轮11实现对第一锥形齿轮21运动的控制。所以本发明实施例是通过两个相啮合的锥形齿轮来精准控制鞘管的转动转动,并结合鞘管头部的固定弯段41,从而使得导管6能够到达消融位置。
36.具体实施时,本发明实施例是在第二锥形齿轮11内设有内齿轮,参见图3所示,机械臂1输出轴插入第二锥形齿轮11内,且所述机械臂1输出轴与所述第二锥形齿轮11的内齿轮相啮合,从而使得机械臂1通过带动所述第二锥形齿轮11的转动,进而实现控制所述第一锥形齿轮21转动,最终实现对所述鞘管4的旋转控制。
37.当然本领域技术人员也可以通过其他的控制方式来实现对鞘管4的控制,如通过设置常规的直齿轮来进行传动控制,但是相比来说,锥形齿轮传动更能实现精准控制。
38.进一步地,本发明实施例在鞘管4的固定弯段41上还设有金属环43,通过所述金属环43来对所述鞘管4的固定弯段41的位置进行定位,从而实现更为精确的确定鞘管4头端的位置。
39.具体实施时,为了达到更为精确的控制作用,所以本发明实施例中是在固定弯段41上设置多个金属环,其中,至少有一个金属环设置在所述固定弯段41的头部,且至少还有一个金属环设置在所述固定弯段41与所述硬质鞘管段42的连接处。也即本发明实施例是失少在固定弯段41的头尾各设置一个金属环,并在x光造影下获取鞘管头端飞位置信息和方向信息,以进一步对鞘管4进行调整控制,最终通过对固定弯段41的精确控制,从而使得导管6能够准确到达病灶实现消融处理,具体参见图4所示。
40.另外一种实施方式,是在鞘管4的固定弯段41上设有电极环43,通过所述电极环43来对所述鞘管4的固定弯段41的位置进行定位。
41.与金属环的设置方式相类似地,本发明实施例中的电极环43为多个,其中,至少有一个电极环43设置在鞘管4的固定弯段41的头部,且至少还有一个电极环43设置在所述固定弯段41与所述硬质鞘管段42的连接处,从而使得在三维彩超下能够清楚显示鞘管4头端飞位置信息和方向信息,以进一步对鞘管4进行调整控制,最终通过对固定弯段41的精确控制,从而使得导管6能够准确到达病灶实现消融处理。
42.本发明实施例通过在鞘管4的头端设置电极环43或者金属环能够实现准确获取鞘管4头端飞位置信息和方向信息,所以本发明相对于现有技术肯定更能够实现准确且快速的对鞘管4的控制。
43.换句话来说,本发明实施例通过在固定弯鞘管弯曲段的一端设置金属环或者电极,能够使鞘管4头端能在x光造影下或在三维标测系统内可见,从而提高手术精度和手术质量。
44.其中,本发明实施例中的所述影像设备包括有上述的x光造影和三维标测系统,当然在具体实施时,本领域技术人员也可以根据实际需要来设置其他各种可用的影像设备,本发明对此不作具体限定。
45.参见图5,本发明实施例中的鞘管4包括鞘管壁和设置于鞘管壁内的导管通道46,其中,导管通道46设置在所述鞘管4的中心位置;且鞘管壁内嵌入有金属编织材料,以提高旋转保真度,鞘管4内径为8.5fr,以适配8fr的消融导管6,鞘管内置有止血阀。
46.也即,本发明实施例通过鞘管壁内嵌入的金属编织材料,来提高旋转保真度。并且本发明实施例的鞘管4内径尺寸是可以与对应的消融导管6相适配的。
47.具体实施时,本发明实施例所述鞘管传动柄3后端设有三通接头5,所述三通接头5的输出通道与鞘管4内的导管通道46连通,可通过三通接头5向导管通道46注射用于润滑导管6与鞘管4之间接触面的盐水或用于防止鞘管4附近血液凝结的肝素抗凝,以及用于心脏造影的dsa造影剂等。
48.进一步地,针对在射下下操作影响术者健康问题,通过控制器,使得术者可远程操控机械臂1控制固定弯鞘管的轴向推送、后撤与旋转,不仅提高控制精度,还能避免手术过程中的辐射,具体参见图6和图7所示;
49.具体实施时,本发明实施例中的控制器是通过控制所述机械臂1的前后移动来带动所述鞘管4的推送与后撤,进而带动所述导管6的前后移动,且所述控制器通过所述机械臂1来带动所述鞘管4转动进而改变固定弯鞘管的头部的指向。
50.具体实施时,本发明实施例中,所述控制器包括控制终端9和处理器8,其中,
51.所述控制终端9,用于接收操作指令,并将影像设备采集的图像进行显示;
52.所述处理器8,用于根据所述操作指令对所述鞘管4、传动柄3和所述机械臂1进行控制。
53.本发明实施例的固定弯鞘可通过医生远程操控进行手术,避免了医生手术过程中被x射线等辐射,对健康产生不利影响,并可实现远程操作,也为更多患者提供了优质的医疗服务。
54.下面将结合附图1-图7通过一个具体的例子来对本发明方法进行详细的解释和说
明:
55.参见图1,本发明实施例的控制装置包括机械臂1、鞘管4和传动柄3,鞘管4分为固定弯段41和硬质鞘管段42,其中,硬质鞘管段42的一端嵌入在传动柄3内,固定弯段41设置于鞘管远离传动柄3的一端,鞘管4包括鞘管壁和设置于鞘管中心的导管通道46。传动柄3上固定套设有第一锥形齿轮21,第一锥形齿轮21转动可带动传动柄3及鞘管4绕中心轴周向转动,以达到旋转鞘管4的目的。通过旋转固定弯鞘管即能够改变固定弯鞘管头端的指向,以此来调整固定弯鞘管的头端尽可能靠近目标消融位置,来使消融导管6以最佳的角度对其进行消融治疗,提高治疗效果和效率,并且不需要额外控制鞘管4打弯的装置来调整鞘管4头端的指向,节省了鞘管4制造成本。
56.参见图2和图3,本发明实施例的鞘管4通过鞘管支撑器2安装在机械臂1上,鞘管支撑器2上设有第二锥形齿轮11,第二锥形齿轮11还设有内齿轮,将鞘管4安装在鞘管支撑器2上后,鞘管支撑器2上的第二锥形齿轮11与鞘管传动柄3的第一锥形齿轮21相啮合,机械臂1输出轴插入第二锥形齿轮11,并与其内齿轮啮合,机械臂1通过带动第二锥形齿轮11转动来控制鞘管传动柄3的第一锥形齿轮21转动,从而实现鞘管4的旋转,通过机器人控制整个机械臂1的前后移动来完成对鞘管4的推送与后撤。
57.需要说明的是,本发明实施例中的鞘管支撑器2是通过卡扣件22来与鞘管4进行卡扣连接的,当然在具体实施时,本领域的技术人员也可以采用其他的连接方式来实现将鞘管支撑器2与鞘管4的连接。
58.参见图2,本发明实施例的鞘管传动柄3后端设有三通接头5,三通接头5的输出通道与鞘管4内的导管通道46连通,可通过三通接头5向导管通道46注射用于润滑导管6与鞘管4之间接触面的盐水或用于防止鞘管4附近血液凝结的肝素抗凝,以及用于心脏造影的dsa造影剂等。
59.另外,本发明实施例的鞘管4内径尺寸为8.5fr,可适配8fr的导管6,鞘管4靠近传动柄3的一端设有止血阀,止血阀用于当导管6进入鞘管4时防止血液从鞘管口流出。
60.参见图4所示,本发明实施例的鞘管固定偏转段一端设有不少于两个金属环,金属环在x光造影下可视,以便术者在x光造影下实时了解鞘管4头端的具体位置和方向,根据位置信息来控制鞘管4进行下一步动作。
61.当然,在具体实施时,也可以在鞘管固定偏转段的一端设有不少于两个电极,所述电极的信号连接线穿过鞘管壁与传动柄3后端的信号线接口连接,信号线接口接入三维标测系统,电极可以在三维标测系统下可视,术者可通过三维标测系统实时了解鞘管4的空间信息和方向。
62.参见图5所示,本发明实施例的鞘管管体内嵌有金属编织网以及电极信号线45,金属编制网44设置于鞘管壁内,使得鞘管4固定弯一端能够响应于鞘管4近端部分的旋转方向的改变,能够沿着鞘管4纵轴从鞘管的近端部分向远端部分传递扭矩以提高旋转保真度,提高术者操控鞘管4的精准度。
63.参见图6和图7,本发明实施例中,术者通过控制终端9发送控制指令(鞘的二个自由度)至处理器8,处理器8接收到医生端的指令后操控远端的机械臂1控制鞘管4进行相对应的手术动作,并且本发明通过三维导航界面显示屏10来对当前各个导管6和鞘管4的位置进行实时显示。如图7所示,医生只需要在医生控制室远程操作手术,不需要在手术床7旁进
行手术操作,大量减少了术者在射线下的暴露时间。
64.本发明消融作过程包括:
65.1.首先通过机械臂支架将机械臂1移动至手术合适位置;
66.2.将鞘管支撑器2安装至机械臂1上,使机械臂输出轴插入鞘管支撑器2的第二锥形齿轮11,并与第二锥形齿轮11的内齿轮啮合;
67.3.将鞘管4安装至鞘管支撑器2上,使第一锥形齿轮21与第二锥形齿轮11啮合;
68.4.合上鞘管支撑器2上的合页,将鞘管4固定在机械臂1的鞘管支撑器2上;
69.5.术者通过操控控制终端9由处理器8向远端机械臂1发送术式指令,通过机器人机械臂1控制鞘管4的周向旋转以及轴向的前进与后退,将鞘管4头端送至目标病灶位置;
70.6.通过鞘管传动手柄处的三通接头5向导管通道46内注入盐水,用于导管6与鞘管4之间的润滑;
71.7.导管6从传动柄3的后端进入鞘管内,穿过鞘管4直接到达目标病灶位置,对目标病灶进行消融治疗。
72.本发明实施例所述的控制装置至少具有以下的有益效果:
73.1.本发明实施例中的控制装置设有传动柄3,传动柄3可配合机器人机械臂1的鞘管支撑器2完成鞘管4的周向旋转以及轴向的前进与后退;
74.2.本发明实施例中的鞘管4头端为固定弯,通过旋转鞘管即可改变鞘管4头端的指向,从而使鞘管4头端尽可能靠近目标消融位置,不需要额外的打弯装置,节省了鞘管4成本;
75.3.本发明实施例的固定弯鞘可通过医生远程操控进行手术,避免了手术过程中被x射线等辐射,对健康产生不利影响;
76.4.本发明实施例的鞘管传动柄3端带有三通接头5,可通过三通接头5向导管通道46注射用于润滑导管6与鞘管之间接触面的盐水或用于防止鞘管4附近血液凝结的肝素抗凝,以及用于心脏造影的dsa造影剂等;
77.5.本发明实施例的鞘管壁内嵌入有金属编织材料,提高旋转保真度;
78.6.本发明实施例的鞘管4头端安装有不少于2个电极,用于采集电生理信号,电极在三维标测系统内可视,可以基于介电的三维标测系统,确定鞘管4的空间位置及形态,或者鞘管4头端设有不少于2个金属环,所述的金属环用于在x光下显影,使术者能够通过x光造影获取鞘管4头端的空间位置和方向。
79.尽管为示例目的,已经公开了本发明的优选实施例,本领域的技术人员将意识到各种改进、增加和取代也是可能的,因此,本发明的范围应当不限于上述实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1