一种动力型脊柱椎板平面磨削机器人装置及其安全控制方法
1.本发明涉及一种脊柱椎板磨削装置,尤其涉及一种动力型脊柱椎板平面磨削机器人装置及其安全控制方法。
背景技术:
2.椎板磨削装置是控制磨削工具在椎板特定位置实现径向和轴向直线型磨削的装置。随着手术机器人技术的发展,利用手术机器人实现脊柱手术智能化成为研究热点之一。目前商业化的脊柱手术机器人产品均为导航定位型;灵巧操作型机器人前景广阔但尚未真正应用于脊柱椎板切除临床手术,精确操作性能是影响椎板切除手术安全的关键。从手术动作来看,脊柱手术实际所需的操作动作通常是在解剖部位周围小区域内完成的;这为手术机器人的开发提供了一种思路:首先利用通用机器人平台进行手术区域的导航定位,再利用专门设计的机器人化末端装置进行术区小范围的灵巧操作。这也符合手术机器人的功能模块化的发展方向。
3.针对上述所提的机器人化末端装置开发问题,本发明设计了一种动力型脊柱椎板平面磨削机器人装置,可安装在通用机械臂末端,实现一个平面内沿任意曲线路径的椎板自动磨削操作。
技术实现要素:
4.本发明提出了一种动力型脊柱椎板平面磨削机器人装置,用于椎板磨削手术。本发明具有通用性,既可以配合通用机械臂使用,也可以独立使用。
5.本发明包括两自由度磨削定位模块、安全控制模块、承载模块及附属配件。所述两自由度磨削定位模块包括旋转运动驱动单元和直线运动驱动单元,所述安全控制模块包括磨削反馈力采集装置和安全控制策略,所述承载模块包括双沿外v圆弧形轨道180
°
标准节段和承载润滑装置,所述旋转运动驱动单元通过对应的螺纹孔固定于承载润滑装置上,所述旋转运动驱动单元中的驱动齿轮与双沿外v圆弧形轨道180
°
标准节段的外沿齿轮咬合,所述直线运动驱动单元通过对应的螺纹孔固定于承载润滑装置上;所述磨削反馈力采集装置中传感器固定面连接件与直线运动驱动单元中滚珠丝杠盖帽连接。
6.所述旋转运动驱动单元包括伺服电机a、电机法兰a、电机联轴器a、刹车a、减速机输入轴、减速机前端法兰、谐波减速机、减速机输出轴、驱动齿轮(14)、齿轮轴顶,所述电机法兰a侧方设有多个装配孔,伺服电机a、刹车a与谐波减速机连接线从中穿过,并可通过该孔将电机联轴器a与伺服电机a的轴使用紧定螺钉固定,所述电机联轴器a由刹车转子毂结构与轴构成,一端有与电机轴直径相同的光孔,转子毂部分与刹车a配合,电机联轴器a轴插入减速机输入轴,减速机输入轴通过螺钉与减速机输入端固定,减速机输出端通过螺钉与减速机输出轴固定。
7.所述直线运动驱动单元包括伺服电机b、电机法兰b、电机联轴器b、刹车b、法兰底座、联轴器,垫片、滚珠丝杠,电机法兰b侧方设有多个装配孔,伺服电机b和刹车b连接线从
中穿过,并可通过该孔将电机联轴器b与伺服电机b的轴使用紧定螺钉固定;电机联轴器b由刹车转子毂结构与轴构成,一端有与电机轴直径相同的光孔,转子毂部分与刹车b配合,电机联轴器b轴与滚珠丝杠轴通过联轴器相连,电机联轴器b具有台阶轴用于与联轴器连接时的定位。
8.所述磨削反馈力采集装置包括六维力/力矩传感器、传感器工作面连接件、传感器固定面连接件、超声刀、直线导轨,传感器固定面连接件正面通过螺钉与传感器相连,反面有两个螺纹孔与直线滑轨相连,将超声刀放置于传感器工作面连接件的卡槽内,调整合适长度后使用螺钉将传感器工作面连接件锁紧,所述传感器工作面连接件包括与传感器工具面直接连接的连接面以及超声刀夹持构件,所述传感器固定面连接件包括与传感器固定面连接的连接面以及与滚珠丝杠盖帽相连的构件。
9.所述承载模块包括双沿外v圆弧形轨道180
°
标准节段和承载润滑装置,所述承载润滑装置包括同心轴承、偏心轴承、润滑块、承载板、直线滑轨;所述同心轴承、偏心轴承固定于承载板上,轴承与双沿外v圆弧形轨道180
°
标准节段配合,承载板安装再可沿轨道移动的润滑块。
10.所述两自由度磨削定位模块是基于两自由度的圆弧远程运动中心机构,两自由度分别包括平面内沿圆弧形轨道的转动以及超声刀沿径向方向的运动,转动由旋转运动驱动单元伺服电机a驱动齿轮并配合同心轴承、偏心轴承实现承载板沿双沿外v圆弧形轨道180
°
标准节段进行转动,径向方向运动由直线运动驱动单元伺服电机b驱动滚珠丝杠,并由滚珠丝杠带动与滚珠丝杠盖帽相连接的磨削反馈力采集装置,实现所述超声刀沿双沿外v圆弧形轨道180
°
标准节段径向运动,其中的rcm的位置位于在圆弧轨道圆心位置,超声刀在磨削过程中始终通过该位置,保证超声刀的磨削角度为垂直于磨削表面。
11.所述安全控制模块采用自动磨削策略,通过对磨削反馈力采集装置的实时磨削反馈力进行安全控制,包含整体磨削策略、单层磨削、软组织保护策略、骨组织状态识别策略,所述整体磨削策略利用磨削力通过svm二分类器决定是否进行下一层磨削,所述单层磨削策略通过模糊逻辑控制器,保持切向力恒定,利用轴向力的变化来判断是否进行下一层磨削,所述呼吸因素通过模糊逻辑控制器表现为超声刀轴向速度变化,所述软组织保护策略,当超声刀末端不慎穿透椎板,立即停止磨削,所述状态识别策略,利用轴向力和振幅决策级融合的方式判断当前的骨组织状态。
12.所述磨削反馈力采集装置包含六维力传感器并通过所设计的固定面与工作面连接件实现与超声刀和滚珠丝杠的连接,在磨削过程中对磨削反馈力进行实时反馈;所设计的传感器固定面连接件可实现在承载板沿圆形轨道运动过程中超声刀始终沿圆弧轨道径向方向的运动。
13.本发明的优点在于:所述的一种动力型脊柱椎板平面磨削机器人装置具有驱动装置可独立工作亦可安装在机械臂末端进行组合工作,所述装置结构简单灵巧,节省设备空间,可实现对脊柱病变部位的自动切割,实现小切口手术。
附图说明
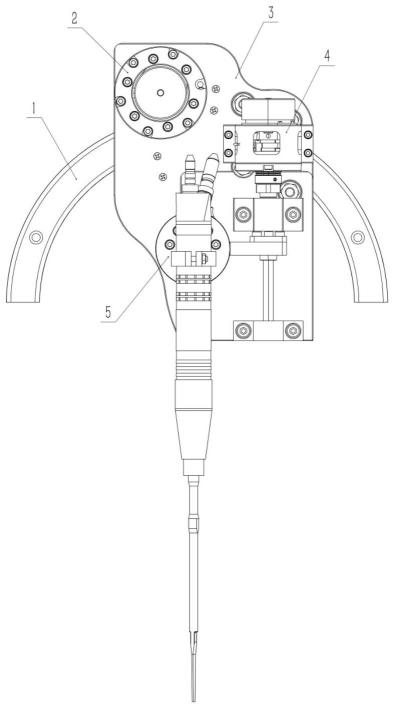
14.图1是本发明的前视立体结构示意图。
15.图1a是本发明的后视立体结构示意图。
16.图1b是本发明的另一种视角立体结构示意图。
17.图2是本发明中旋转运动驱动单元的一种视角立体结构示意图。
18.图2a是本发明中旋转运动驱动单元的一种视角剖面示意图。
19.图2b是本发明中联轴器a与减速机输入轴的一种视角立体结构示意图。
20.图3是本发明中直线运动驱动单元的一种视角立体结构示意图。
21.图3a是本发明中直线运动驱动单元的一种视角剖面示意图。
22.图3b是本发明中联轴器b的一种视角立体结构示意图。
23.图4是本发明中磨削反馈力采集装置的一种视角立体结构示意图。
24.图4a是本发明中传感器工作面连接件的一种视角立体结构示意图。
25.图4b是本发明中传感器固定面连接件的一种视角立体结构示意图。
26.图5是本发明中承载润滑装置的一种视角立体结构示意图。
27.图6是本发明中自动磨削策略流程图。
28.图中1.双沿外v圆形轨道180
°
标准节段,2.旋转运动驱动单元,3.承载润滑装置,4.直线运动驱动单元,5.磨削反馈力采集装置,6.伺服电机a,7.电机法兰a,8.电机联轴器a,9.刹车a,10.减速机输入轴,11.减速机前端法兰,12.谐波减速机,13.减速机输出轴,14.驱动齿轮,15.齿轮轴顶,16.伺服电机b,17.电机法兰b,18.电机联轴器b,19.刹车b,20.法兰底座,21.联轴器,22.垫片,23.滚珠丝杠,24.直线导轨,25.传感器固定面连接件,26.六维力/力矩传感器,27.传感器工作面连接件,28超声刀,29.同心轴承,30.偏心轴承,31.同心轴承,32.润滑块,33.承载板。
具体实施方式
29.下面结合具体的实施例和附图对本发明作进一步描述。
30.实施例:结合图1、图1a和图1b所示,一种动力型脊柱椎板平面磨削机器人装置及其安全控制方法,包括两自由度磨削定位模块、安全控制模块、承载模块及附属配件,所述两自由度磨削定位模块包括旋转运动驱动单元2和直线运动驱动单元4,所述安全控制模块包括磨削反馈力采集装置5和安全控制策略,所述承载模块包括双沿外v圆弧形轨道180
°
标准节段1和承载润滑装置3,所述旋转运动驱动单元2通过对应的螺纹孔固定于承载润滑装置上,所述旋转运动驱动单元2中的驱动齿轮14与双沿外v圆弧形轨道180
°
标准节段1的外沿齿轮咬合,所述直线运动驱动单元4通过对应的螺纹孔固定于承载润滑装置上;所述磨削反馈力采集装置5中传感器固定面连接件25与直线运动驱动单元4中滚珠丝杠23盖帽连接。所述的一种动力型脊柱椎板平面磨削机器人装置通过图6的自动磨削策略,基于180
°
圆形轨道标准节段1与旋转运动驱动单元(2)和直线运动驱动单元(4)协同控制超声刀,实现超声刀末端在一个平面内沿任意曲线自动切割,节省设备空间,满足椎板切除的需求。
31.使用状态下,本发明的组合满足椎板切除手术的操作要求,基于180
°
圆形轨道标准节段1与旋转运动驱动单元(2)和直线运动驱动单元(4)协同控制超声刀,可实现对脊柱病变部位的自动切割,利用自动磨削策略实现自动磨削并保护椎管内神经、脊髓,节省设备空间,实现小切口手术。
32.对于本领域的普通技术人员而言,具体实施例只是对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进
行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1