用于末端颞下颌关节咬肌康复的按摩系统及机器人
1.本发明设计涉及机器康复设备领域,具体地,涉及一种用于末端颞下颌关节咬肌康复的按摩系统及机器人。
背景技术:
2.颞下颌关节紊乱病(temporomandibular disorder,tmd)是颞下颌关节解剖及功能异常的一类症状的总称,在肌骨疾病中排第二位(仅次于下腰痛),tmd在人群中的发病率有5%~12%,张口受限、疼痛、关节弹响是该疾病的三大症状。2014年的最新的关于tmd疾病的诊断与分型标准,将其分为关节紊乱、咀嚼肌紊乱及头痛三类[1],肌源性tmd包括肌痛(myalgia)、挛缩、肥厚、新生物、运动障碍及引起系统性/中枢性疼痛等,肌痛包括肌肉局部疼痛、肌筋膜痛、肌筋膜牵涉痛、肌腱炎、肌炎、肌阵挛等。目前多数诊疗的重点针对关节盘移位,但对肌源性关注较少,然而,肌源性tmd容易引起口面部疼痛,口面部疼痛(orofacial pain)是表现在面部或口腔的疼痛,tmd是引起非牙源性口面部疼痛的主要原因。据报道,有学者纳入了2504名受试者进行调查随访,发现该人群中口面部疼痛的发生率约为26%,经过4年随访,54%仍有口面部疼痛。
[0003]
目前,对疼痛的研究越来越受重视,疼痛亦作为“第五大生命体征”。tmd相关的疼痛因与日常进食、说话密切相关,对患者的生理及心理均产生较大的影响,且易转为慢性疼痛。调查研究显示,慢性疼痛可以严重影响躯体和社会功能,使患者无法参与正常的生活和社交活动。慢性疼痛是一种疾病,不仅仅在于疼痛本身,更重要的是在慢性疼痛中,长期的疼痛刺激可以促使中枢神经系统发生病理性重构,使疼痛疾病的进展愈加难以控制,国际疼痛学会(iasp)提出的慢性疼痛的6个亚型中即包含慢性继发头痛和口面部疼痛。
[0004]
现有的按摩设备,通过动力系统驱动机械臂模拟人进行按摩,由于实际的工作过程中,每个目标对象肌肉松紧程度不同,现有的按摩设备不能进行调节。
[0005]
为解决上述问题现有技术中多采用在按摩头上设置弹性结构,用于缓冲实际按摩过程中的按摩力,并且通过调节弹性结构的弹力,实现对于不同目标对象的匹配,但仍需进行多次调节。存在调节时间长,调节过程繁琐的问题。由于目标对象不能保持静止状态,实际使用过程中,机器人不能及时作出调整,影像实际体验。
[0006]
为此,为解决上述问题本发明提供一种用于末端颞下颌关节咬肌康复的按摩系统及机器人。
技术实现要素:
[0007]
为了解决现有技术问题,本发明提供一种足内翻或足外翻双平面图像分析系统及方法。
[0008]
本发明的技术方案如下:
[0009]
一种用于末端颞下颌关节咬肌康复的按摩系统,包括:
[0010]
视觉检测系统,获取康复对象面部的初始状态的静态面部信息和康复按摩过程中
的动态面部信息,根据所述静态面部信息选取静态颞下颌关节所在区域,并规划初始按摩路径,根据所述动态面部信息选取动态颞下颌关节所在区域,并规划动态按摩路径;
[0011]
模拟系统,获取康复对象面部的mri图像信息,根据mri图像信息与静态面部信息和动态面部信息模拟创建模拟康复对象,并进行负载测试获取康复对象脸颊脂肪、咬合肌肉、下颌骨和腮腺的弹性模型;
[0012]
处理器,根据所述弹性模型为初始按摩路径计算与沿初始按摩路径接触动态颞下颌关节所在面部区域的初始按压力与初始旋转力,所述弹性模型结合所述动态按摩路径计算沿动态按摩路径接触动态颞下颌关节所在面部区域的动态按压力与动态旋转力;
[0013]
按摩系统,包括动力系统和按摩机构,所述动力系统驱动连接所述按摩机构,所述动力系统驱动所述按摩机构根据所述初始按摩路径按照所述初始按压力与初始旋转力为康复对象进行颞下颌关节咬肌康复按摩,以及,所述动力系统驱动所述按摩机构根据所述动态按摩路径按照所述动态按压力与动态旋转力为康复对象进行颞下颌关节咬肌康复按摩;
[0014]
修正系统,所述修正系统包括设置于所述按摩机构上的轴力传感器,用于获取按摩机构与工作过程中目标对象的反馈力和反馈力矩,并将时时反馈力传输到处理器,处理器根据所述反馈力与反馈力矩生成修正数据,用于校正所述初始按压力、初始旋转力、动态按压力和动态旋转力,保持康复按摩过程中接触挤压过程中精准给出初始按压力、初始旋转力、动态按压力和动态旋转力。
[0015]
在上述方案基础上并且作为上述方案的优选方案,所述修正数据包括获取初始按摩路径上的第一修正数据和获取动态按摩路径上的第二修正数据,根据所述第一修正数据调整所述初始按压力与初始旋转力,根据所述第二修正数据调整动态按压力与动态旋转力。
[0016]
在上述方案基础上并且作为上述方案的优选方案,所述静态面部信息包括静态面部表面彩色图像和静态面部深度图像,采用表面向量法根据所述静态面部表面彩色图像与所述静态面部深度图像规划初始按摩路径;
[0017]
所述动态面部信息包括动态面部表面彩色图像和动态面部深度图像,采用表面向量法根据所述动态面部表面彩色图像与所述动态面部深度图像规划动态按摩路径。
[0018]
在上述方案基础上并且作为上述方案的优选方案,所述康复对象面部颞下颌关节所在区域设有aruco标识,用于静态颞下颌关节所在区域与动态颞下颌关节所在区域的选定。
[0019]
在上述方案基础上并且作为上述方案的优选方案,所述aruco标识包括四个角点标识和每两个相邻角点标识之间的中点标识,获取每一所述角点标识和每一所述中点标识的三维坐标;
[0020]
根据每一所述静态面部图像中每一所述角点标识和每一所述中点标识的三维坐标规划初始按摩路径;
[0021]
根据每一所述动态面部图像中每一所述角点标识和每一所述中点标识的三维坐标规划动态按摩路径。
[0022]
在上述方案基础上并且作为上述方案的优选方案,所述按摩机构包括第一机械臂和第二机械臂,所述第一机械臂上设有第一按摩头,所述第二机械臂上设有第二按摩头,所
述第一按摩头与第二按摩头的与目标对象的接触面均为弧面结构。
[0023]
在上述方案基础上并且作为上述方案的优选方案,所述轴力传感器包括安装于所述第一机械臂上的第一轴力传感器和安装于所述第二机械臂上的第二轴力传感器。
[0024]
在上述方案基础上并且作为上述方案的优选方案,所述第一轴力传感器与所述第二轴力传感器均为六轴力传感器。
[0025]
在上述方案基础上并且作为上述方案的优选方案,还包括存储分类系统,将每一目标对象包括弹性模型、初始按压力、初始旋转力、动态按压力与动态旋转力在内的按摩数据进行分类存储。
[0026]
一种仿真按摩机器人,包括:
[0027]
视觉检测系统,用于采集目标对象初始状态的静态图像信息和工作过程中的动态图像信息,根据所述静态图像信息选取第一按摩区域并规划第一按摩路径,根据所述动态图像信息选取第二按摩区域并规划第二按摩路径;
[0028]
模拟系统,采集目标对象的mri图像信息,根据mri图像信息与静态图像信息和动态图像信息模拟创建模拟目标对象,并进行负载测试获取目标对象的弹性模型;
[0029]
处理器,根据所述弹性模型为第一按摩路径计算第一按摩力,所述弹性模型结合所述动态图像信息为所述第二按摩路径计算第二按摩力;
[0030]
按摩系统,包括动力系统和按摩机构,所述动力系统驱动连接所述按摩机构,所述动力系统驱动所述按摩机构根据所述第一按摩路径按照所述第一按摩力为目标对象进行按摩,以及,所述动力系统驱动所述按摩机构根据所述第二按摩路径按照所述第二按摩力为目标对象进行按摩;
[0031]
修正系统,所述修正系统包括设置于所述按摩机构上的轴力传感器,用于获取按摩机构与工作过程中目标对象的反馈力和反馈力矩,并将时时反馈力传输到处理器,处理器根据所述反馈力与反馈力矩生成修正数据,用于校正所述第一按摩力与所述第二按摩力,保持仿真按摩的精准性。
[0032]
与现有技术相比,本发明提出的技术方案具有如下的有益效果:
[0033]
本发明用于末端颞下颌关节咬肌康复的按摩系统中修整系统获取按摩机构与工作过程中目标对象的反馈力和反馈力矩,并将时时反馈力传输到处理器,处理器根据所述反馈力与反馈力矩生成修正数据,用于校正所述初始按压力、初始旋转力、动态按压力和动态旋转力,保持康复按摩过程中接触挤压过程中精准给出初始按压力、初始旋转力、动态按压力和动态旋转力;本发明结构简单,能够实现康复按摩过程中精准控制初始按压力、初始旋转力、动态按压力与动态旋转力,保持对于脸颊脂肪、咬合肌肉、下颌骨和腮腺进行长时间精准康复按摩。本发明能够根据康复对象的状态将始按摩路径调整为动态按摩路径,并根据康复对象的运动状态时时调整动态按摩路径,保证按摩过程中每一按摩点位的准确性。
[0034]
本发明通过处理器调节第一按摩力与第二按摩力,结构简单,区别于现有的仿真按摩机器人复杂的按摩结构,并且本发明的处理器,根据弹性模型为第一按摩路径计算第一按摩力,弹性模型结合动态图像信息为第二按摩路径计算第二按摩力;在进行实际的工作过程中,根据弹性模量确定第一按摩力和第二按摩力,本发明通过处理器控制第一按摩力与第二按摩力,实现仿真按摩机器人能够精准的模拟人手进行按摩时的按摩力,提高按
摩机器人的工作过程中的舒适度。修正系统能够根据工作过程中,轴力传感器获取的反馈力与反馈力矩修正第一按摩力与第二按摩力,保持仿真按摩的精准性。本发明的处理器在面对不同的目标对象时,能够快速高效的进行路径规划和在规划路径中按摩力给定,并且在工作过程中,当目标对象出现移动时,本发明能够实时进行路径规划和按摩力的调整,保证仿真的精准性。
附图说明
[0035]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0036]
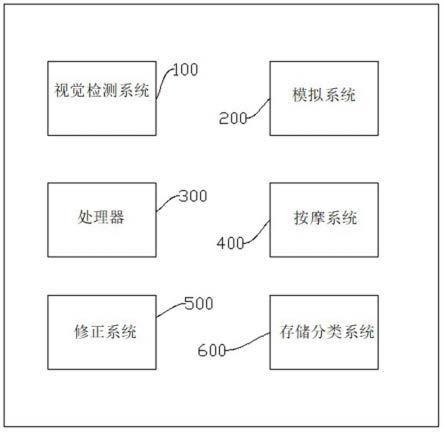
图1为本技术实施例,示出了按摩系统结构框图;
[0037]
图2为本技术实施例,示出了按摩机构结构图;
[0038]
图3为本技术实施例,示出了一种仿真按摩机器人的操作方法流程图;
具体实施方式
[0039]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0040]
在本文中使用的术语“包括”及其变形表示开放性包括,即“包括但不限于”。除非特别申明,术语“或”表示“和/或”。术语“基于”表示“至少区域地基于”。术语“一个示例实施例”和“一个实施例”表示“至少一个示例实施例”。术语“另一实施例”表示“至少一个另外的实施例”。术语“第一”、“第二”等等可以指代不同的或相同的对象。下文还可能包括其他明确的和隐含的定义。
[0041]
针对现有技术中存在的技术问题,本技术提供了一种足内翻或足外翻双平面图像分析系统及方法。以下将结合实施例对本技术提供的技术方案进行阐释和说明。
[0042]
为了更好的说明本发明,下方结合附图1-3本发明进行详细的描述。
[0043]
实施例一:
[0044]
一种用于末端颞下颌关节咬肌康复的按摩系统,包括:视觉检测系统100,获取康复对象面部的初始状态的静态面部信息和康复按摩过程中的动态面部信息,根据静态面部信息选取静态颞下颌关节所在区域,并规划初始按摩路径,根据动态面部信息选取动态颞下颌关节所在区域,并规划动态按摩路径。
[0045]
本实施例中,静态面部信息包括静态面部表面彩色图像和静态面部深度图像,采用表面向量法根据静态面部表面彩色图像与静态面部深度图像规划初始按摩路径;动态面部信息包括动态面部表面彩色图像和动态面部深度图像,采用表面向量法根据动态面部表面彩色图像与动态面部深度图像规划动态按摩路径。
[0046]
具体地,根据静态面部表面彩色图像上的按摩点的三维坐标结合静态面部深度图像相对应的按摩点三维坐标采用表面向量法规划初始按摩路径,根据动态面部表面彩色图像上的按摩点的三维坐标结合动态面部深度图像相对应的按摩点三维坐标采用表面向量法规划动态按摩路径。需要说明的是,本发明采用realsense深度摄像头进行静态面部信息
与动态面部信息的采集,realsense深度摄像头在进行图像采集过程中的拍照频率为50次/秒,首先将第一次的拍摄的静态面部表面彩色图像与静态面部深度图像处理得到第一按摩路径,工作过程中康复对象初始状态为静止状态,肌源性颞下颌关节紊乱病康复过程中肌肉放松按摩时间长,康复对象没有无需打麻药,由此不能长时间保持静止不动,为此,realsense深度摄像头时时进行拍摄,获得动态面部表面彩色图像和动态面部深度图像,并为每一动态面部表面彩色图像和动态面部深度图像处理获得动态按摩路径,在康复按摩过程中进行按摩路径调整,保证对于肌肉按压路径的准确性;本发明中拍照频率为50次/秒,所以 20ms调整一次按摩路径,小于人体肌肉反应的200ms,使得本发明的仿真按摩机器人在工作过程中能够保持高精度的仿真按摩。本发明中,具体的图像采集器不做限制,能够对目标对象进行表面彩色图像与深度图像采集的其它图像采集装置均可;以及,对于拍照频率不做限定,实际拍照频率不小于5次/秒均在本发明的保护范围之内。
[0047]
本发明的按摩系统在对康复对象进行康复按摩的过程中,首先应准确选定颞下颌关节所在区域,然后规划路径,再进行按摩。为此,在康复对象面部颞下颌关节所在区域设置aruco标识,便于根据静态面部信息准确快速的选取静态颞下颌关节所在区域,动态图形信息准确快速的选取动态颞下颌关节所在区域。具体地,aruco 标识包括四个角点标识和每两个相邻角点标识之间的中点标识,获取每一角点标识和每一中点标识的三维坐标;根据每一静态面部图像中每一角点标识和每一中点标识的三维坐标规划初始按摩路径;根据每一动态面部图像中每一角点标识和每一中点标识的三维坐标规划动态按摩路径。详细地,时时读取aruco标识码上对应四个角点标识与四个中点标识的三维坐标,并与静态颞下颌关节所在区域与动态颞下颌关节所在区域内相对应角点标识或中点标识的三维坐标进行对比,得到一个转换矩阵t-move,通过转换矩阵进行坐标转换,调整初始按摩路径与动态按摩路径。t
‑ꢀ
move具体转换过程如下:
[0048]
1、向量变换:
[0049]
向量pa=(x,y,z),则pb=x
*
ub+y
*
vb+z
*
wb;其中pa为p在a坐标系下的向量表示,pa为p在b坐标系下的向量表示,ub、vb、wb分别为a坐标系下的坐标轴 x、y、z在b坐标系下的向量表示。
[0050]
2、点的变换:
[0051]
点pa=(x,y,z),则点pb=x
*
ub+y
*
vb+z
*
wb+qb;其中pa为p在a坐标系下的坐标,pa为p在b坐标系下的坐标,ub、vb、wb分别为a坐标系下的坐标轴x、y、 z在b坐标系下的向量表示,qb为a坐标系下的原点在b坐标系下的坐标表示。
[0052]
3、点和向量的矩阵表示:
[0053]
(x
′
,y
′
,z
′
)=x
*
ub+y
*
ub+z
*
ub[0054]
(x
′
,y
′
,z
′
)=x
*
ub+y
*
ub+z
*
ub+qb[0055]
(x
′
,y
′
,z
′
,w
′
)=x
*
ub+y
*
vb+z
*
wb+w
*
qb[0056]
其中w=0,为向量的坐标变换,w=1,为点的坐标变换
[0057]
令qb=(q
x
,qy,qz,1),ub=(u
x
,uy,uz,0),ub=(v
x
,vy,vz,0),wb=(w
x
,wy,wz,0),则可得到坐标系a到坐标系b的变换的矩阵为:
[0058][0059]
模拟系统200,获取康复对象面部的mri图像信息,根据mri图像信息与静态面部信息和动态面部信息模拟创建模拟康复对象,并进行负载测试获取康复对象脸颊脂肪、咬合肌肉、下颌骨和腮腺的弹性模型;本实施例中,首先根据目标对象的 mri图像与静态面部信息相结合,通过一定的载荷试验创建脸颊脂肪,咬合肌肉,下颌骨和腮腺的弹性模型。在对目标对象按摩的过程中,通过载荷试验建立与康复对象面部的模型,通过肌肉按摩的不同力反馈数据进行肌肉紧张程度的评估,并将相应的力反馈数据结合到工作过程中的路径规划和与面部接触力的确定。需要说明的是,本发明的处理器300,根据弹性模型为初始按摩路径计算与沿初始按摩路径接触动态颞下颌关节所在面部区域的初始按压力与初始旋转力,弹性模型结合动态按摩路径计算沿动态按摩路径接触动态颞下颌关节所在面部区域的动态按压力与动态旋转力;在进行实际的工作过程中,根据弹性模量确定初始按压力、初始旋转力、动态按压力与动态旋转力,本发明通过处理器控制初始按压力、初始旋转力、动态按压力与动态旋转力,保持康复按摩过程中接触挤压过程中精准给出初始按压力、初始旋转力、动态按压力和动态旋转力。
[0060]
本实施例的具体示例,按摩系统400,包括动力系统和按摩机构,动力系统驱动连接按摩机构,动力系统驱动按摩机构根据初始按摩路径按照初始按压力与初始旋转力为康复对象进行颞下颌关节咬肌康复按摩,以及,动力系统驱动按摩机构根据动态按摩路径按照动态按压力与动态旋转力为康复对象进行颞下颌关节咬肌康复按摩;其中按摩机构包括第一机械臂和第二机械臂,第一机械臂上设有第一按摩头,第二机械臂上设有第二按摩头,第一按摩头与第二按摩头的与目标对象的接触面均为弧面结构。本实施例中动力系统为电机,第一机械臂与第二机械臂能够实现包括旋转、弯曲和移动在内的动作,具体结构为现有技术在此不做展开说明,第一按摩头与第二按摩头在动力系统的驱动下,用于对目标对象接触进行按压或旋转,工作过程中调整初始按摩路径到动态按摩路径,以及实时调整动态按摩路径,保证康复按摩过程中,能够精准的康复对象的脸颊脂肪、咬合肌肉、下颌骨和腮腺。
[0061]
参见图2示例,本发明的第一机械臂包括第一线性轨道11、第一移动杆12、第一上转动机构13和第一下转动机构15,第一线性轨道通过第一移动杆带动第一上转动机构进行水平移动,第一上转动机构能够进行转动运动,第一上转动机构通过第一连接杆14带动第一下转动机构进行转动,第一下转动机构15能够进行转动运动,第一下转动机构的转动输出端连接有一个第一转动杆,realsense深度摄像头3 安装于第一转动杆上,第一按摩头41安装于第一转动杆的端部;第二机械臂包括第二线性轨道21、第二移动杆22、第二上转动机构23和第二下转动机构25,第二线性轨道21通过第二移动杆22带动第二上转动机构23进行水平移动,第二上转动机构23能够进行转动运动,第二上转动机构23通过第二连接杆24带动第二下转动机构25进行转动,第二下转动机构25能够进行转动运动,第二下转动机构25的转动输出端连接有一个第二转动杆26,realsense深度摄像头3安装于第二转动杆26 上,第二按摩头42安装于第二转动杆26的端部。需要说明的是,本发明对于第一机械臂与第二机械臂的具体结构不做限定。
[0062]
本实施例中,修正系统500包括设置于按摩机构上的轴力传感器,用于获取按摩机构与工作过程中目标对象的反馈力和反馈力矩,并将时时反馈力传输到处理器,处理器根据反馈力与反馈力矩生成修正数据,用于校正初始按压力、初始旋转力、动态按压力和动态旋转力,保持康复按摩过程中接触挤压过程中精准给出初始按压力、初始旋转力、动态按压力和动态旋转力。本发明的具体示例,轴力传感器包括安装于第一机械臂上的第一轴力传感器和安装于第二机械臂上的第二轴力传感器。本实施例中的第一轴力传感器与第二轴力传感器均为六轴力传感器。本实施例中修正数据包括获取初始按摩路径上的第一修正数据和获取动态按摩路径上的第二修正数据,根据第一修正数据调整初始按压力与初始旋转力,根据第二修正数据调整动态按压力与动态旋转力。详细地,参见图2所示,本发明的六轴力传感器,能够获取第一上转动机构的第一力矩、第一下转动机构的第二力矩、第一上转动机构与第一下转动机构之间的第一力臂、第一下转动机构与第一按摩头之间的第二力臂、第一按摩头与目标对象之间的第一反馈力和第一反馈力的第三力臂,同理,获取第二上转动机构的第一力矩、第二下转动机构的第二力矩、第二上转动机构与第二下转动机构之间的第一力臂、第二下转动机构与第二按摩头之间的第二力臂、第二按摩头与目标对象之间的第一反馈力和第一反馈力的第三力臂。需要说明的是,轴力传感器获取的数据根据具体的机械臂结构进行设定,在此,本发明不做具体限定。
[0063]
本发明的按摩机器人使用过程中,目标对象不可能保持静止的状态,随着第一按摩头与第二按摩头对康复对象的脸颊脂肪、咬合肌肉、下颌骨和腮腺康复按摩过程中,当康复对象未发生移动时,realsense深度摄像头采集康复对象的静态面部表面彩色图像和静态面部深度图像,第一按摩头与第二按摩头按照初始按摩路径对康复对象的脸颊脂肪、咬合肌肉、下颌骨和腮腺进行康复按摩,同时根据静态面部表面彩色图像和静态面部深度图像确定按摩的初始点和终止点,并通过反馈力和反馈力矩修正初始按压力与初始旋转力提高按摩的精准性;当目标对象会发生移动, realsense深度摄像头采集目标对象移动过程的动态面部信息,动态面部信息包括动态面部表面彩色图像和动态面部深度图像,采用表面向量法为目标对象每一次移动调整动态按摩路径,同时根据动态面部表面彩色图像和动态面部深度图像确定按摩的初始点和终止点,以及通过反馈力和反馈力矩修正动态按压力与动态旋转力提高康复按摩过程中能够保持接触挤压过程中精准给出初始按压力、初始旋转力、动态按压力和动态旋转力。
[0064]
优选地,本发明还包括存储分类系统600,将每一目标对象包括弹性模型、初始按压力、初始旋转力、动态按压力与动态旋转力在内的按摩数据进行分类存储。用于储存每一康复对象的状态,并记录每一康复对象弹性模型,便于进行下次的康复按摩。
[0065]
实施例二:
[0066]
一种仿真按摩机器人,包括:视觉检测系统100,用于采集目标对象初始状态的静态图像信息和工作过程中的动态图像信息,根据静态图像信息选取第一按摩区域并规划第一按摩路径,根据动态图像信息选取第二按摩区域并规划第二按摩路径。
[0067]
本实施例中,静态图像信息包括静态表面彩色图像和静态深度图像,采用表面向量法根据静态表面彩色图像与静态深度图像规划第一按摩路径;动态图像信息包括动态表面彩色图像和动态深度图像,采用表面向量法根据动态表面彩色图像与动态深度图像规划第二按摩路径;具体地,根据静态表面彩色图像上的按摩点的三维坐标结合静态深度图像
相对应的按摩点三维坐标采用表面向量法规划第一按摩路径,根据动态表面彩色图像上的按摩点的三维坐标结合动态深度图像相对应的按摩点三维坐标采用表面向量法规划第二按摩路径。需要说明的是,本发明采用 realsense深度摄像头进行静态图像信息与动态图像信息的采集,realsense 深度摄像头在进行图像采集过程中的拍照频率为50次/秒,首先将第一次的拍摄的静态表面彩色图像与静态深度图像处理得到第一按摩路径,工作过程中目标对象不能保持静止不动,为此,realsense深度摄像头时时进行拍摄,获得动态表面彩色图像和动态深度图像,并为每一动态表面彩色图像和动态深度图像处理获得第二按摩路径,在工作过程中进行按摩路径调整;本发明中拍照频率为50次/秒,所以 20ms调整一次按摩路径,小于人体肌肉反应的200ms,使得本发明的仿真按摩机器人在工作过程中能够保持高精度的仿真按摩。本发明中,具体的图像采集器不做限制,能够对目标对象进行表面彩色图像与深度图像采集的其它图像采集装置均可;以及,对于拍照频率不做限定,实际拍照频率不小于5次/秒均在本发明的保护范围之内。
[0068]
本发明的仿真按摩机器人在对目标对象进行按摩的过程中需要首先选中目标对象的待按摩区域,然后在进行按摩,为此,目标对象上待按摩的区域上设有aruco 标识,便于根据静态图像信息准确快速的选取第一按摩区域,动态图形信息准确快速的选取第二按摩区域。具体地,aruco标识包括四个角点标识和每两个相邻角点标识之间的中点标识,获取每一角点标识和每一中点标识的三维坐标;根据每一静态信息图像中每一角点标识和每一中点标识的三维坐标规划第一按摩路径;根据每一动态信息图像中每一角点标识和每一中点标识的三维坐标规划第二按摩路径。详细地,时时读取aruco标识码上对应四个角点标识与四个中点标识的三维坐标,并与第一按摩区域与第二按摩区域内相对应角点标识或中点标识的三维坐标进行对比,得到一个转换矩阵t-move,通过转换矩阵进行坐标转换,调整第一按摩路径与第二按摩路径。t-move具体转换过程如下:
[0069]
1、向量变换:
[0070]
向量pa=(x,y,z),则pb=x
*
ub+y
*
vb+z
*
wb;其中pa为p在a坐标系下的向量表示,pa为p在b坐标系下的向量表示,ub、vb、wb分别为a坐标系下的坐标轴 x、y、z在b坐标系下的向量表示。
[0071]
2、点的变换:
[0072]
点pa=(x,y,z),则点pb=x
*
ub+y
*
vb+z
*
wb+qb;其中pa为p在a坐标系下的坐标,pa为p在b坐标系下的坐标,ub、vb、wb分别为a坐标系下的坐标轴x、y、 z在b坐标系下的向量表示,qb为a坐标系下的原点在b坐标系下的坐标表示。
[0073]
3、点和向量的矩阵表示:
[0074]
(x
′
,y
′
,z
′
)=x
*
ub+y
*
ub+z
*
ub[0075]
(x
′
,y
′
,z
′
)=x
*
ub+y
*
ub+z
*
ub+qb[0076]
(x
′
,y
′
,z
′
,w
′
)=x
*
ub+y
*
vb+z
*
wb+w
*
qb[0077]
其中w=0,为向量的坐标变换,w=1,为点的坐标变换
[0078]
令qb=(q
x
,qy,qz,1),ub=(u
x
,uy,uz,0),ub=(v
x
,vy,vz,0),wb=(w
x
,wy,wz,0),则可得到坐标系a到坐标系b的变换的矩阵为:
[0079][0080]
模拟系统200,采集目标对象的mri图像信息,根据mri图像信息与静态图像信息和动态图像信息模拟创建模拟目标对象,并进行负载测试获取目标对象的弹性模型;本实施例中,首先根据目标对象的mri图像与静态图像信息相结合,通过一定的载荷试验创建脸颊脂肪,咬合肌肉,下颌骨和腮腺的弹性模型。在对目标对象按摩的过程中,通过载荷试验建立与目标对象的模型,通过肌肉按摩的不同力反馈数据进行肌肉紧张程度的评估,并将相应的力反馈数据结合到工作过程中的路径规划和按摩力大小的确定。需要说明的是,本发明的处理器300,根据弹性模型为第一按摩路径计算第一按摩力,弹性模型结合动态图像信息为第二按摩路径计算第二按摩力;在进行实际的工作过程中,根据弹性模量确定第一按摩力和第二按摩力,本发明通过处理器控制第一按摩力与第二按摩力,实现仿真按摩机器人能够精准的模拟人手进行按摩时的按摩力,提高按摩机器人的工作过程中的舒适度。
[0081]
本实施例的具体示例,按摩系统400,包括动力系统和按摩机构,动力系统驱动连接按摩机构,动力系统驱动按摩机构根据第一按摩路径按照第一按摩力为目标对象进行按摩,以及,动力系统驱动按摩机构根据第二按摩路径按照第二按摩力为目标对象进行按摩;其中按摩机构包括第一机械臂和第二机械臂,第一机械臂上设有第一按摩头,第二机械臂上设有第二按摩头,第一按摩头与第二按摩头的与目标对象的接触面均为弧面结构。本实施例中动力系统为电机,第一机械臂与第二机械臂能够实现包括旋转、弯曲和移动在内的动作,具体结构为现有技术在此不做展开说明,第一按摩头与第二按摩头在动力系统的驱动下,用于对目标对象接触进行按压或旋转,工作过程中实时调整第一按摩路径,保证工作过程中第一按摩力与第二按摩力能够精准的作用到目标对象,实现仿真按摩的准确性。参见图2示例,本发明的第一机械臂包括第一线性轨道11、第一移动杆12、第一上转动机构13和第一下转动机构15,第一线性轨道通过第一移动杆带动第一上转动机构进行水平移动,第一上转动机构能够进行转动运动,第一上转动机构通过第一连接杆14带动第一下转动机构进行转动,第一下转动机构15能够进行转动运动,第一下转动机构的转动输出端连接有一个第一转动杆,realsense深度摄像头3安装于第一转动杆上,第一按摩头41安装于第一转动杆的端部;第二机械臂包括第二线性轨道21、第二移动杆22、第二上转动机构23和第二下转动机构25,第二线性轨道21通过第二移动杆 22带动第二上转动机构23进行水平移动,第二上转动机构23能够进行转动运动,第二上转动机构23通过第二连接杆24带动第二下转动机构25进行转动,第二下转动机构25能够进行转动运动,第二下转动机构25的转动输出端连接有一个第二转动杆26,realsense深度摄像头3安装于第二转动杆26上,第二按摩头42安装于第二转动杆26的端部。需要说明的是,本发明对于第一机械臂与第二机械臂的具体结构不做限定。
[0082]
本实施例中,修正系统500包括设置于按摩机构上的轴力传感器,用于获取按摩机构与工作过程中目标对象的反馈力和反馈力矩,并将时时反馈力传输到处理器,处理器根据反馈力与反馈力矩生成修正数据,用于校正第一按摩力与第二按摩力,保持仿真按摩的精准性。本发明的具体示例,轴力传感器包括安装于第一机械臂上的第一轴力传感器和安装于第二机械臂上的第二轴力传感器。本实施例中的第一轴力传感器与第二轴力传感器均
为六轴力传感器。修正系统,本实施例中的修正数据包括获取第一按摩路径上的第一修正数据和获取第二按摩路径上的第二修正数据,根据第一修正数据调整第一按摩力为第一修正按摩力,根据第二修正数据调整第二按摩力为第二修正按摩力。详细地,参见图2所示,本发明的六轴力传感器,能够获取第一上转动机构的第一力矩、第一下转动机构的第二力矩、第一上转动机构与第一下转动机构之间的第一力臂、第一下转动机构与第一按摩头之间的第二力臂、第一按摩头与目标对象之间的第一反馈力和第一反馈力的第三力臂,同理,获取第二上转动机构的第一力矩、第二下转动机构的第二力矩、第二上转动机构与第二下转动机构之间的第一力臂、第二下转动机构与第二按摩头之间的第二力臂、第二按摩头与目标对象之间的第一反馈力和第一反馈力的第三力臂。需要说明的是,轴力传感器获取的数据根据具体的机械臂结构进行设定,在此,本发明不做具体限定。
[0083]
本发明的按摩机器人使用过程中,目标对象不可能保持静止的状态,随着第一按摩头与第二按摩头按压目标对象过程中,当目标对象未发生移动时,realsense 深度摄像头采集目标对象的静态表面彩色图像和静态深度图像,第一按摩头与第二按摩头按照第一按摩路径对目标对象进行按摩,同时根据静态表面彩色图像和静态深度图像确定按摩的初始点和终止点,并通过反馈力和反馈力矩修正第一按摩力提高按摩的精准性;当目标对象会发生移动,realsense深度摄像头采集目标对象移动过程的动态图像信息,动态图像信息包括动态表面彩色图像和动态深度图像,采用表面向量法为目标对象每一次移动指定第二边按摩路径,同时根据动态表面彩色图像和动态深度图像确定按摩的初始点和终止点,以及通过反馈力和反馈力矩修正第二按摩力提高按摩的精准性。本发明能够在按摩的过程中动态调整按摩路径和按摩力,保证实际工作过程中的精准性。
[0084]
优选地,本发明还包括存储分类系统600,将每一目标对象包括弹性模型、第一按摩力与第二按摩力在内的按摩数据进行分类存储。用于储存每一目标对象的状态,并记录每一目标对象弹性模型,便于进行下次的按摩。
[0085]
实施例三:
[0086]
参见图3所示,本实施例提供一种仿真按摩机器人的操作方法,包括如下步骤:
[0087]
步骤s100:获取目标对象初始状态的静态图像信息,并根据静态图像信息选取第一按摩区域并规划第一按摩路径;
[0088]
步骤s200:获取目标对象的mri图像信息,根据mri图像信息与静态图像信息模拟创建模拟目标对象,并进行负载测试获取模拟目标对象的弹性模型;
[0089]
步骤s300:根据弹性模型为第一按摩路径计算第一按摩力;
[0090]
步骤s400:第一机械臂沿第一按摩路径移动,且设置于第一机械臂端部的第一按摩头根据第一按摩力对目标对象进行按摩,第二机械臂沿第一按摩路径移动,且设置于第二机械臂端部的第二按摩头根据第一按摩力对目标对象进行按摩;
[0091]
步骤s500:获取目标对象工作过程中的动态图像信息,根据动态图像信息选取第二按摩区域并规划第二按摩路径;
[0092]
步骤s600:弹性模型结合动态图像信息为第二按摩路径计算第二按摩力;
[0093]
步骤s700:第一机械臂沿第二按摩路径移动,且设置于第一机械臂端部的第一按摩头根据第二按摩力对目标对象进行按摩,第二机械臂沿第二按摩路径移动,且设置于第二机械臂端部的第二按摩头根据第二按摩力对目标对象进行按摩;
[0094]
步骤s800:第一机械臂上的第一轴力传感器时时获取目标对象对于第一机械臂的第一反馈力与第一反馈力矩,第二机械臂上的第二轴力传感器时时获取目标对象低于第二机械臂的第二反馈力与第二反馈力矩;
[0095]
步骤s900:根据第一反馈力、第一反馈力矩、第二反馈力与第二反馈力矩修正第一按摩力与第二按摩力。
[0096]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,以及对于上述实施例一个或多个进行组合实施例,本领域技术人员可以在权利要求的范围内做出各种变化或修改或组合,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1