一种基于人工智能的数字肠镜诊疗系统的制作方法
一种基于人工智能的数字肠镜诊疗系统
1.技术领域
2.本发明属于医学图像处理和图像分类技术领域,具体涉及一种基于人工智能的数字肠镜诊疗系统。
背景技术:
3.随着社会的发展,人们的生活水平越来越高,医疗水平也在不断提高着,但是癌症却越来越严重地威胁着我们的生命安全,比如说肠癌。有数据表明,有数据显示:在过去30多年里,中国结直肠癌患病人数增长了700%,成为全球肠癌确诊人数最多的国家。肠癌是近些年高发的消化道恶性肿瘤,它的病发率仅次于胃癌。且近些年随着我国逐渐向着老龄化发展、国民平均寿命增长、饮食习惯改变等因素影响,肠癌病发率仍在不断增长,甚至呈现了逐渐年轻化趋势,中青年人群患肠癌也并不罕见。
4.为了发现肠癌,现有“筛查”方法有基于粪便样本,然而粪便样本结果并不准确,不能直接发现病灶。肠癌的早期诊断通常患者需要进行肠镜检查。之所以肠癌早期诊断率不高,除了和癌症本身的特点有关外,还与大家对“肠镜”畏惧有关。肠镜在弯曲、无序的肠道中拐弯是通过外置的旋钮牵动肠镜唯一的活动节实现的,而操作人员拖动肠镜在肠道中进入的过程是一个类同盲人过街的过程,存在诸多不确定因素,是一个试探性的前行过程,肠镜在肠道中何时、何处、向哪个方向拐弯完全靠操作人员对人体胃肠道解剖部位的了解、凭借手感经验、以及受检人反馈的腹胀部位做出判断的。肠镜检查的整体过程对操作者的手法、经验以及娴熟度等都提出了较高的要求。而且,在检查过程中,受检人通常感到腹胀难忍、时常出现恶心呕吐现象。严重的,甚至可能出现休克等不良反应,更存在着肠道穿孔的风险。而且,支持现有金标准技术(光学肠镜)医疗资源严重不足且没有扩展空间。
5.现有技术问题概括:现有肠镜系统检测不准确、肠镜检查系统多依靠经验、患者检查过程中体验不好。
6.针对上述技术问题,本发明提供了一种基于人工智能的数字肠镜诊疗系统。
技术实现要素:
7.为实现本发明目的,本发明采用如下技术方案:根据本发明的一个方面,提供了一种基于人工智能的数字肠镜诊疗系统。
8.一种基于人工智能的数字肠镜诊疗系统,其特征在于,具体包括:扫描机架、检查床、计算机;扫描机架,包括:高压射线发生器,射线管,用于产生x射线;检查床,包括床体、重量传感器、探测器,床体用于承载患者,并且由低辐射吸收率材料制成;重量传感器用于检查人体的体重数据;探测器用于收集衰减后的射线信号,将射线信号转变为可供记录的电信号;
计算机连接检查床,接收检查床的体重数据,用于需造影时的造影剂给药;与探测其相连,接收电信号,首先通过滤波算法对电信号进行去噪处理,并利用pcm-tvm算法基于去噪处理后的数据重建三维立体的肠道图像,以及在重建的图像上根据训练完成的基于pso-svm算法与mask r-cnn算法的组合预测模型对肠道状态进行判断。
9.采用基于人工智能的数字肠镜诊疗系统可解决现有肠镜系统检测不准确、肠镜检查系统多依靠经验、患者检查过程中体验不好的问题,患者仅需躺在检查床上就可以实现对肠道状态的判断,将肠道 图像进行三维立体的重建,可以使得整体的图像变得更加直观,便于医生进行对肠道状态进行判断;根据训练完成的基于pso-svm算法与mask r-cnn算法的组合预测模型对肠道状态进行判断,其中pso-svm算法采用pso算法对svm算法的初值进行确定,使得整体的收敛速度大大加快,与此同时采用mask r-cnn算法,与传统的cnn算法对比其精度和收敛速度都有较大的提升,将上述算法的两种预测结果组合起来,使得最后的判断结果变得更加准确,而且收敛速度也大大加快。
10.进一步的技术方案在于,所述低辐射吸收率材料采用碳纤维材料。
11.进一步的技术方案在于,所述探测器采用固体探测器或气体探测器。
12.进一步的技术方案在于,所述滤波算法采用k-means聚类算法对电信号进行去噪处理。
13.通过聚类算法对电信号进行去噪处理,可以进一步提高得到电信号的准确度,从而使得最终得到的三维图像的精度更高,使得对于疾病的判断准确度从数据基础上即有一定程度的提高。
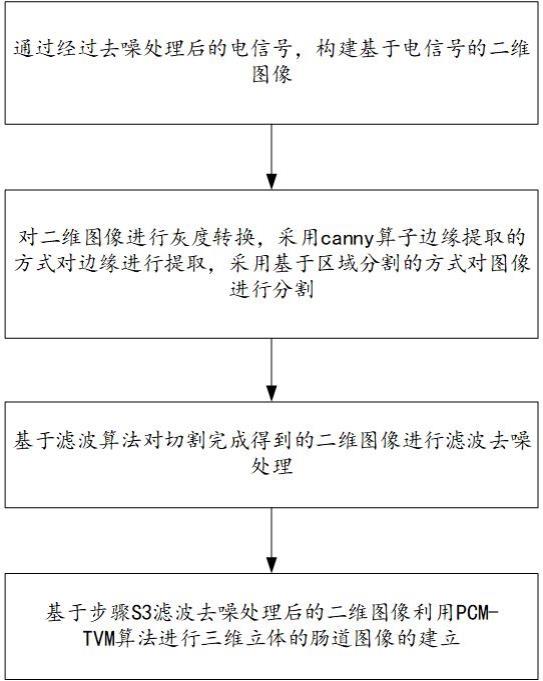
14.进一步的技术方案在于,所述利用pcm-tvm算法基于去噪处理后的数据重建三维立体的肠道图像,还包括:s1:通过经过去噪处理后的电信号,构建基于电信号的二维图像;s2:对二维图像进行灰度转换,采用canny算子边缘提取的方式对边缘进行提取,采用基于区域分割的方式对图像进行分割;s3:基于滤波算法对切割完成得到的二维图像进行滤波去噪处理;s4:基于步骤s3滤波去噪处理后的二维图像利用pcm-tvm算法进行三维立体的肠道 图像的建立。
15.通过将二维图像进行灰度转换,并采用canny算子边缘提取的方式对肠道图像的边界进行提取,最后分割得到相应的肠道图像,从而为下一步的三维图形重建奠定了基础,通过滤波算法对图像数据进行滤波,可以使得图像特征变得更加的明确,最后通过pcm-tvm算法构建三维立体的肠道图像,可以使得重建的图像清晰度更高,使得提供给医生进行医学判断还是通过组合预测模型进行病况的判断都均有较高的优势。
16.进一步的技术方案在于,所述滤波算法采用非局部均值算法,计算公式为:其中,给定离散噪声图像f(x),估计值u(x)为图像中所有像素的加权平均值;λ(x)为像素x的邻域,ω(x,y)为原始图像f(x)的权重,且0<ω(x,y)<1;nlm算法不仅仅对单个点的灰度进行比较,还在整个邻域中进行了对比,这使得它
比邻域筛选器有着更强的鲁棒性,使得最后的去噪效果变得更好。
17.进一步的技术方案在于:所述步骤s2进行采用canny算子边缘提取的方式对边缘进行提取之前,首先采用自适应直方图的方法对图像进行均衡化。
18.通过自适应直方图的方法对图像进行均衡化,可以避免当图像的灰度分布不均匀时,得到的边缘就不是很理想,使得得到的边缘更加细致连续光滑。
19.进一步的技术方案在于:所述基于pso-svm算法与mask r-cnn算法的组合预测模型,具体为:通过基于pso-svm算法的预测模型,对重建三维立体的肠道图像进行预测,输出肠道图像的对应的肠道状态,通过基于mask r-cnn算法的预测模型,对重建三维立体的肠道图像进行预测,输出肠道图像的对应的肠道状态,针对专家打分的形式,对不同算法的预测得到的肠道状态赋予不同的权值,从而得到最终的肠道状态。
20.通过组合型预测模型,其中pso-svm算法采用pso算法对svm算法的初值进行确定,使得整体的收敛速度大大加快,与此同时采用mask r-cnn算法,与传统的cnn算法对比其精度和收敛速度都有较大的提升,将上述算法的两种预测结果组合起来,使得最后的判断结果变得更加准确,而且收敛速度也大大加快,最终通过专家打分的形式,利用不同的算法为其进行权值的确定,从而使得整体的预测结果变得更加准确。
21.进一步的技术方案在于:所述pso-svm算法通过pso算法对svm算法的惩罚因子和径向基核函数的参数进行初始化,进一步的技术方案在于:所述肠道状态包括正常、癌变、疾病三种状态,疾病状态表明存在除癌变外的其他肠道疾病,癌变状态表示存在肠道癌变类疾病,正常状态表示肠道处于正常状态。
22.通过将肠道状态分为三种,分为正常、癌变、疾病三种状态,使得对于疾病的判断变得更加准确,为后期医生进行诊治提供了参考。
附图说明
23.通过参照附图详细描述其示例实施方式,本发明的上述和其它特征及优点将变得更加明显。
24.图1是根据实施例1一种基于人工智能的数字肠镜诊疗系统的框架图。
25.图2是利用pcm-tvm算法基于去噪处理后的数据重建三维立体的肠道图像的流程图。
具体实施方式
26.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的实施方式;相反,提供这些实施方式使得本发明将全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。图中相同的附图标记表示相同或类似的结构,因而将省略它们的详细描述。
27.用语“一个”、“一”、“该”、“所述”用以表示存在一个或多个要素/组成部分/等;用语“包括”和“具有”用以表示开放式的包括在内的意思并且是指除了列出的要素/组成部分/等之外还可存在另外的要素/组成部分/等。
28.实施例1
如图1所示,根据本发明的一个方面,提供了一种基于人工智能的数字肠镜诊疗系统。
29.一种基于人工智能的数字肠镜诊疗系统,其特征在于,具体包括:扫描机架、检查床、计算机;扫描机架,包括:高压射线发生器,射线管,用于产生x射线;检查床,包括床体、重量传感器、探测器,床体用于承载患者,并且由低辐射吸收率材料制成;重量传感器用于检查人体的体重数据;探测器用于收集衰减后的射线信号,将射线信号转变为可供记录的电信号;在另外的一种可能的实施例中,检查床,用于承载患者,检查床具有重量传感器,并且可以是碳纤维之类的低辐射吸收率材料制成。碳纤维预浸料层压而成,树脂和基材可以充分浸渍,床板结构均匀,可防止伪影产生。碳纤维的x射线透过性好,能帮助x射线准确无误地穿透人体,经过多次转换,在屏幕上呈现出一个高清晰的图案。碳纤维板可用于手术台或者放射治疗用的面板以及衬垫板,基于碳纤维材料的各项特性,如抗撞击、耐刻刮、易清洗、防潮防火、无渗透表面的防霉菌、防静电以及耐化学腐蚀、抗氧化等,在很大程度上满足了医疗器械的强度和刚度需求。碳纤维板的尺寸在(1.35m~2.35m)长*(0.55m~1.25m)宽。碳纤维复合材料床板较其他各类材料床板相比,x射线透过率明显提高。检查床内配备重量感知单元,将感知的重量发送到计算机,需要造影剂时计算机负责计算所需剂量。
30.计算机连接检查床和扫描机架,控制扫描机架产生x射线,接收检查床的体重数据,用于需造影时的造影剂给药;与探测其相连,接收电信号,首先通过滤波算法对电信号进行去噪处理,并利用pcm-tvm算法基于去噪处理后的数据重建三维立体的肠道图像,以及在重建的图像上根据训练完成的基于pso-svm算法与mask r-cnn算法的组合预测模型对肠道状态进行判断。
31.采用基于人工智能的数字肠镜诊疗系统可解决现有肠镜系统检测不准确、肠镜检查系统多依靠经验、患者检查过程中体验不好的问题,患者仅需躺在检查床上就可以实现对肠道状态的判断,将肠道 图像进行三维立体的重建,可以使得整体的图像变得更加直观,便于医生进行对肠道状态进行判断;根据训练完成的基于pso-svm算法与mask r-cnn算法的组合预测模型对肠道状态进行判断,其中pso-svm算法采用pso算法对svm算法的初值进行确定,使得整体的收敛速度大大加快,与此同时采用mask r-cnn算法,与传统的cnn算法对比其精度和收敛速度都有较大的提升,将上述算法的两种预测结果组合起来,使得最后的判断结果变得更加准确,而且收敛速度也大大加快。
32.在另外的一种可能的实施例中,所述低辐射吸收率材料采用碳纤维材料。
33.在另外的一种可能的实施例中,所述探测器采用固体探测器或气体探测器。
34.在另外的一种可能的实施例中,其中,固体探测器包括晶体,晶体用于将射线信号先转变为光信号;晶体例如可以是:掺铊碘化钠(nai:tl)、bgo、纯碘化铯(csi)、铊掺杂碘化铯(csi:tl)、氟化钡(baf2)、baf2:y、氟化铈(cef3)、pbwo4和cdwo4等闪烁晶体。
35.在另外的一种可能的实施例中,所述滤波算法采用k-means聚类算法对电信号进行去噪处理。
36.通过聚类算法对电信号进行去噪处理,可以进一步提高得到电信号的准确度,从而使得最终得到的三维图像的精度更高,使得对于疾病的判断准确度从数据基础上即有一
定程度的提高。
37.在另外的一种可能的实施例中,所述利用pcm-tvm算法基于去噪处理后的数据重建三维立体的肠道图像,还包括:s1:通过经过去噪处理后的电信号,构建基于电信号的二维图像;s2:对二维图像进行灰度转换,采用canny算子边缘提取的方式对边缘进行提取,采用基于区域分割的方式对图像进行分割;s3:基于滤波算法对切割完成得到的二维图像进行滤波去噪处理;s4:基于步骤s3滤波去噪处理后的二维图像利用pcm-tvm算法进行三维立体的肠道图像的建立。
38.通过将二维图像进行灰度转换,并采用canny算子边缘提取的方式对肠道图像的边界进行提取,最后分割得到相应的肠道图像,从而为下一步的三维图形重建奠定了基础,通过滤波算法对图像数据进行滤波,可以使得图像特征变得更加的明确,最后通过pcm-tvm算法构建三维立体的肠道图像,可以使得重建的图像清晰度更高,使得提供给医生进行医学判断还是通过组合预测模型进行病况的判断都均有较高的优势。
39.在另外的一种可能的实施例中,所述滤波算法采用非局部均值算法,计算公式为:其中,给定离散噪声图像f(x),估计值u(x)为图像中所有像素的加权平均值;λ(x)为像素x的邻域,ω(x,y)为原始图像f(x)的权重,且0<ω(x,y)<1;nlm算法不仅仅对单个点的灰度进行比较,还在整个邻域中进行了对比,这使得它比邻域筛选器有着更强的鲁棒性,使得最后的去噪效果变得更好。
40.在另外的一种可能的实施例中,所述步骤s2进行采用canny算子边缘提取的方式对边缘进行提取之前,首先采用自适应直方图的方法对图像进行均衡化。
41.通过自适应直方图的方法对图像进行均衡化,可以避免当图像的灰度分布不均匀时,得到的边缘就不是很理想,使得得到的边缘更加细致连续光滑。
42.在另外的一种可能的实施例中,所述基于pso-svm算法与mask r-cnn算法的组合预测模型,具体为:通过基于pso-svm算法的预测模型,对重建三维立体的肠道图像进行预测,输出肠道图像的对应的肠道状态,通过基于mask r-cnn算法的预测模型,对重建三维立体的肠道图像进行预测,输出肠道图像的对应的肠道状态,针对专家打分的形式,对不同算法的预测得到的肠道状态赋予不同的权值,从而得到最终的肠道状态。
43.通过组合型预测模型,其中pso-svm算法采用pso算法对svm算法的初值进行确定,使得整体的收敛速度大大加快,与此同时采用mask r-cnn算法,与传统的cnn算法对比其精度和收敛速度都有较大的提升,将上述算法的两种预测结果组合起来,使得最后的判断结果变得更加准确,而且收敛速度也大大加快,最终通过专家打分的形式,利用不同的算法为其进行权值的确定,从而使得整体的预测结果变得更加准确。
44.在另外的一种可能的实施例中,所述pso-svm算法通过pso算法对svm算法的惩罚因子和径向基核函数的参数进行初始化,在另外的一种可能的实施例中,所述肠道状态包括正常、癌变、疾病三种状态,疾
病状态表明存在除癌变外的其他肠道疾病,癌变状态表示存在肠道癌变类疾病,正常状态表示肠道处于正常状态。
45.通过将肠道状态分为三种,分为正常、癌变、疾病三种状态,使得对于疾病的判断变得更加准确,为后期医生进行诊治提供了参考。
46.在本发明实施例中,术语“多个”则指两个或两个以上,除非另有明确的限定。术语“安装”、“连接”、“固定”等术语均应做广义理解,例如,“连接”可以是固定连接,也可以是可折卸连接,或一体地连接。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明实施例中的具体含义。
47.本发明实施例的描述中,需要理解的是,术语“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明实施例和简化描述,而不是指示或暗示所指的装置或单元必须具有特定的方向、以特定的方位构造和操作,因此,不能理解为对本发明实施例的限制。
48.在本说明书的描述中,术语“一个实施例”、“一个优选实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本发明实施例的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
49.以上仅为本发明实施例的优选实施例而已,并不用于限制本发明实施例,对于本领域的技术人员来说,本发明实施例可以有各种更改和变化。凡在本发明实施例的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明实施例的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1