一种面向妇科检查的触觉感知软体机器手系统
1.本发明属于软体机器手技术领域,具体涉及一种面向妇科检查的触觉感知软体机器手系统。
背景技术:
2.指检是医生进行快速诊断的重要检查手段,将手指通过自然腔道,然后对生殖器官以及近段的肠道进行检查,主要包括肛门指检和阴道指检。其中阴道指检能够对妇科情况进行全面的评估,主要检查阴道是否存在畸形以及阴道炎,还可以查出宫颈糜烂以及糜烂的程度,甚至还能够判断出子宫以及输卵管卵巢的大小和形态。
3.目前的阴道指检主要通过双手触诊,检查者戴好手套后将手指分别放在病人的阴道和腹部,在双手之间触摸骨盆结构。一般来说,右手插入阴道,左手触摸腹部。放入阴道当中的食指和中指(两指)将检查阴道的通畅程度、深度以及弹性,判断阴道是否存在畸形或者疤痕。之后扪触宫颈,了解宫颈的大小、形状以及硬度,再检查有没有接触性出血、脓液、黏液等,来判断病变情况。
4.传统的刚性机器人技术早已应用于医疗领域,如医疗外骨骼、手术机器人等等。刚性机器人系统在结构化环境中表现良好,具备高精度、大输出力、性能成熟等优点。但此类机器人在实际复杂应用场景中也面临着诸多挑战,如在结构复杂、未知环境中适应性有待提高,在和人体亲密接触的场景中往往共融性不佳等等。
5.软体机器人是目前机器人领域的一个热点和前沿方向。不同于传统的刚性机器人,软体机器人通常由柔性材料构成,具有被动适应性、人机交互安全性及高度灵活性,可以在复杂及未知环境中及与人交互的场景中较好地完成任务。对软体机器人的研究将对医疗机器人系统的发展和推广应用产生明显的推动作用。近年来软体机器人技术的发展,使得用软体机器手指代替医生完成触诊成为可能,这将在极大程度上令医生从日常繁琐的指检操作中解放出来,并且可以帮助医生实现远程触诊,即便不处在同一物理空间下的医生也可以通过主从遥操作的方式控制安装在协作机械臂上的软体机器手指完成指检的信息获取,经处理后形成可视化的信息供医生进行下一步的操作,实现医疗资源尤其是知名医师资源的异地共享。
6.尽管软体机器人已成为研究热点,由连续体结构和超弹性材料的组成的软体机器人应用于阴道指检仍然面临着传感和结构设计方面的挑战:1)许多软体机器人是开环控制,实际应用时缺乏有效的反馈和感知信息,已经被成熟应用的传统传感器,如编码器、应变计和惯性测量装置(imu)会破坏软体结构的柔性,不适合直接应用于软体机器人,相比用于刚性机器人的传统而可靠的模块式传感器,软体机器人需要新的柔性感知解决方案;2)软体机器手指需要有多自由度运动的灵活性,以便检查阴道和宫颈的不同位置,并且手指需具备刚度可调节功能,在插入阴道时具有高刚度,从而保证顺利进入检查位置,而在触诊时切换为柔软的低刚度状态,来感知阴道内是否存在着畸形或疤痕,以及宫颈的硬度和活动度检查,现在还没有相应的技术能够做到。
技术实现要素:
7.为解决上述问题,本发明公开了一种面向妇科检查的触觉感知软体机器手系统,机器手指为硅橡胶制成的层状柱体结构,采用电机&绳索的驱动方式,绳索的张紧可以用于增加手指的刚度;集成在手指末端的柔性压阻传感器用于获取触觉感知信号,经过处理后将可视化的触觉信息反馈给远端的医生,供医生做出诊断;而手指内部的本体感受传感器用于感知软体机器手指形变过程的变形量,对机器手指的弯曲角度作出反馈。本发明操作简单、易于驱动、结构紧凑,在与患者进行交互时能在很大程度上减轻患者的异物感和疼痛感。
8.为达到上述目的,本发明的技术方案如下:一种面向妇科检查的触觉感知软体机器手系统,包括两组相同尺寸的软体机器手指、手指驱动箱、协作机械臂以及人机交互系统四个部分。
9.所述软体机器手指由手指本体、末端的柔性压阻传感器、内部的本体感受传感器组成。所述手指本体呈圆柱状,内部开有四个相同深度的腔体,即三个四周腔体和一个中心腔体,软体机器手指的外侧均匀开有等深的凹槽,使得手指在外力作用下更易弯曲;所述中心腔体用于装配所述本体感受传感器来获取手指的形变量,三个所述四周腔体偏心装配用作驱动的绳索,使得手指实现万象弯曲的功能;所述软体机器手指的前端集成了一个所述柔性压阻传感器来获取触觉感知信号。
10.两组软体机器手指型号尺寸一样,可替换,减少制造成本。
11.三个绳索同步伸缩,那个使插入阴道的机器手指也进行伸缩,另外三个绳索不同步伸缩,压在小腹上的手指可以像人的手指一样弯曲,这个弯曲的目的是把脏器往下压,配合阴道内的手指,共同完成深部触觉感知,如感知子宫内壁后方的包块。
12.所述手指驱动箱由微型电机、电机固定支架、限位滑轮、绳索滑轮、绳索以及箱体组成。所述箱体与所述软体机器手指连接为一个整体;所述微型电机由所述电机固定支架固定于所述箱体之中;所述绳索一端固定至软体机器手指的端部,另一端经由所述限位滑轮固定至所述绳索滑轮处;所述限位滑轮固定于所述箱体内部,通过所述限位滑轮来限制所述绳索从所述软体机器手指中出来的位置,防止所述绳索在收缩过程中产生的力作用于所述四周腔体处,进而损坏所述四周腔体;所述绳索滑轮连接至所述微型电机的转轴处;所述微型电机的转轴转动时,连接至所述绳索滑轮处的所述绳索不断卷绕,使得偏心装配于所述软体机器手指中的所述绳索的长度不断缩短,进而使得所述软体机器手指产生弯曲;三个所述微型电机分别用于驱动单根所述绳索,从而使得所述软体机器手指实现万象弯曲的功能。
13.所述协作机械臂具备六个自由度;两个所述协作机械臂经手指驱动箱连接至所述软体机器手指处,用于所述软体机器手指的精准定位;所述协作机械臂的底端固定至所述人机交互系统处。
14.所述人机交互系统由可移动电子机柜和触摸屏操作界面组成;医疗工作者通过所述触摸屏操作界面与软体机器手系统进行交互;所述触摸屏操作界面用于显示所述软体机器手指由末端的所述柔性压阻传感器获取的触觉信号,经处理后形成可视化的信息,并交由医生进行下一步的操作;所述触摸屏操作界面还用于显示所述软体机器手指内部的本体感受传感器反馈的弯曲信号,由系统处理后将其转换为手指的弯曲角度,从而实现对手指
的弯曲角度的控制。
15.本发明的有益效果为:本发明中的软体机器手指由硅橡胶材料制成,在与患者进行交互时能在很大程度上减轻患者的异物感和疼痛感;本发明中采用电机&绳索的驱动方式,操作简单、易于驱动、结构紧凑,且很容易集成在一个无缆束缚的系统中;本发明中采用电机&绳索的驱动方式,将绳索布置在对称且偏心配置的四周腔体中,可以使手指实现万象弯曲的效果;本发明中的软体机器手指由硅橡胶材料制成,且手指的外侧均匀开有等深的凹槽,使手指在外力作用下更易弯曲,在电机&绳索的驱动作用下,使得软体机器手指具备媲美于人体手指的大工作空间;本发明中的软体机器手指在三个电机驱动的绳索同时收缩而张紧时,其刚度增大,能够顺利插入阴道并进入检查位置;本发明中的软体机器手指的前端集成了一个柔性压阻传感器来获取触觉感知信号,经计算机处理后将可视化的触觉信息反馈给远端的医生,从而使医生做出相应的诊断;本发明中的软体机器手指的中心腔体处集成了一个本体感受传感器,来获取手指弯曲过程中的弯曲信号,经处理后转换为手指的弯曲角,使得手指的形变可控;本发明中的协作机械臂的末端连接至与软体机器手指相连的手指驱动箱,从而实现对软体机器手指位置的精确定位;本发明中的人机交互系统可以获取传感器收集的感知信号,经处理后将可视化的信息显示在触摸屏操作界面上,供医生进行下一步的诊断操作。
附图说明
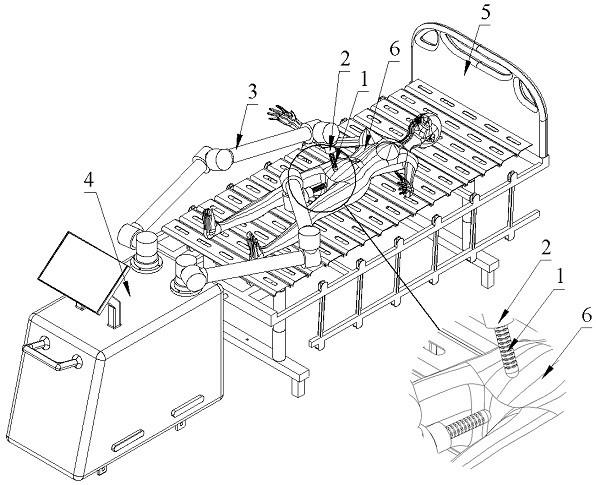
16.图1为本发明所述的面向妇科检查的触觉感知软体机器手系统的操作示意图。
17.图2为本发明所述的面向妇科检查的触觉感知软体机器手系统的指检示意图。
18.图3为本发明所述的面向妇科检查的触觉感知软体机器手系统的软体机器手指的侧视图。
19.图4为本发明所述的面向妇科检查的触觉感知软体机器手系统的软体机器手指的腔体配置图。
20.图5为本发明所述的面向妇科检查的触觉感知软体机器手系统的手指驱动箱的示意图。
21.图6为本发明所述的面向妇科检查的触觉感知软体机器手系统的人机交互系统的示意图。
22.附图标记说明:1—软体机器手指,11—手指本体,12—柔性压阻传感器,13—本体感受传感器,111—中心腔体,112—四周腔体,113—凹槽;2—手指驱动箱,21—微型电机,22—电机固定支架,23—限位滑轮,24—绳索滑轮,25—绳索,26—箱体;3—协作机械臂,31—机械臂末端关节;
4—人机交互系统,41—可移动电子机柜,42—触摸屏操作界面;5—检查床;6—患者,61—小腹,62—阴道,63—宫颈,64—子宫。
具体实施方式
23.下面结合附图和具体实施方式,进一步阐明本发明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。
24.本发明所述的面向妇科检查的触觉感知软体机器手系统包含软体机器手指1、手指驱动箱2、协作机械臂3和人机交互系统4组成。结合图3、图4所示,软体机器手指本体11呈圆柱状(直径12-15mm);软体机器手指本体11的四周开有三个相同大小、相同深度的四周腔体112,用于配置绳索25(绳索25穿孔而过,初始位置平行于手指圆柱体的中轴线),中心腔体111用于配置本体感受传感器13来获取软体机器手指本体11的弯曲信息;软体机器手指本体11的外侧均匀开有等深的凹槽113;软体机器手指本体11的前端集成了一个柔性压阻传感器12用于获取触觉信息。
25.单个凹槽113高度为5mm,绳索是偏心配置,拉紧时手指会向一侧弯曲,弯曲角度在0-90
°
。
26.绳索25采用凯夫拉线,具有较强的耐磨性,嵌入至手指内部,不与人体直接接触,对人体无害。
27.手指驱动箱的示意图如图5所示,由微型电机21、电机固定支架22、限位滑轮23、绳索滑轮24、绳索25以及箱体26组成。微型电机21由电机固定支架22固定于箱体26之中;所述绳索25一端固定至软体机器手指11的端部,另一端经限位滑轮23固定至绳索滑轮24处;绳索滑轮24连接至微型电机21的转轴处。
28.协作机械臂3的末端关节31经手指驱动箱2连接至软体机器手指1。人机交互系统4由可移动电子机柜41和触摸屏操作界面42组成,如图6所示。
29.发明所述的面向妇科检查的触觉感知软体机器手系统的操作示意图与指检示意图分别如图1、图2所示。本发明中的一个完整的指检流程为:一、患者6做好检查准备,平躺在医疗床5上,双腿张开;二、操作者通过人机交互系统4中的触摸屏操作界面42,来精确定位协作机械臂3的位置,使得两只软体机器手指1分别置于患者的小腹61和阴道62外侧处;三、三个微型电机21同时驱动绳索25,绳索产生的张紧力使得置于阴道62外侧的软体机器手指1的刚度增加,在刚度较大的情况下,操纵协作机械臂3使得阴道62外侧处的软体手指1顺利进入患者的阴道62内部;四、微型电机21反向驱动,使得绳索25复位,同时处于患者阴道62内部的软体机器手指1转变为初始的柔软状态;五、正式开始检查,分为阴道内壁检查、宫颈硬度及活动度检查:(1)阴道内壁检查:由协作机械臂3操纵的软体机器手指1在患者的阴道62内部滑动,软体机器手指1前端的柔性压阻传感器12在滑过具有不同表面形状、纹理或生物组织的阴道62内壁时,通过监测滑动过程中的触觉信号的变化,可以感知被接触物体的表面形态和纹理。同时,通过检查软体机器手指1在从阴道62抽出后表面存在的血液、脓液、黏液来判
断病变情况;(2)宫颈硬度及活动度检查:协作机械臂3操纵软体机器手指1去滑动、按压宫颈,根据软体机器手指1前端的柔性压阻传感器12在滑动、按压不同硬度的组织时获得的具有差异化触觉信号来感知宫颈的硬度、活动度;检查过程中置于患者小腹61处的软体机器手指1按压子宫64,用于配合阴道62内部的软体机器手指1来感知子宫64的质地,判断有无水肿、息肉、糜烂;检查过程中本体感受传感器13用于感知软体机器手指1的弯曲程度,协作机械臂3用于其末端软体机器手指1的精确定位;六、人机交互系统4对柔性压阻传感器12获取的触觉信号进行处理,将其转换为可视化的触觉信号显示在触摸屏操作界面42上,经大数据分析后判断病变概率,并交由医生进行下一步的诊断。
30.需要说明的是,以上内容仅仅说明了本发明的技术思想,不能以此限定本发明的保护范围,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰均落入本发明权利要求书的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1