一种用于脑卒中患者的多维度下肢康复评定装置及评定方法
1.本发明属于康复机器人技术、生物特征识别技术领域,具体涉及一种用于脑卒中患者的多维度下肢康复评定装置及评定方法。
背景技术:
2.康复训练效果往往通过康复评定系统来体现,康复评定是通过收集、分析患者的各种资料,从而准确地判断障碍的情况并形成诊断结论的过程。较临床诊断相比,康复评定重在功能,是对功能障碍做出定性、定量判断的过程。科学全面的康复评定方法,可以指导康复训练方式,加速肢体功能的恢复,大大减少康复时间。传统康复评定方法多采用人工关节活动度测量,肌力检测,量化表打分等方法,可能会导致测量误差较大,评定方法过于主观等问题,其次在评定方法方面过于单一,且设备价格昂贵,便携性较差,适用人群存在局限性。为了解决上述问题,本发明提出了一种多维度下肢康复评定装置及评定方法。通过将关节活动度,步态轨迹,步态相位三个层面构成评定方法。通过层次分析法对三个层面的权值进行量化。通过惯性传感器,薄膜压力传感器进行数据的采集。通过上述方法可有效提高康复评定的准确性及科学性。
技术实现要素:
3.本发明的目的在于提供一种用于脑卒中患者的多维度下肢康复评定装置及评定方法,能够解决传统下肢康复评定的问题,是一种设备小型、价格低廉且携带方便的便携性装置,且能对人体下肢关节角度、步态轨迹及足底压力进行数据采集、处理,通过层次分析法进行权值确定并评分的方法,该方法简单且容易实现。
4.本发明的技术方案:一种用于脑卒中患者的多维度下肢康复评定装置,其特征在于它包括上位机模块、主控制器模块、惯性传感器模块、压力传感器模块及通信模块;其中,所述主控制器模块的输入端与惯性传感器模块和压力传感器模块连接,用于关节及足底数据的采集与传输,主控制器模块的输出端与通信模块的输入端连接;所述通信模块用于建立主控制器模块与上位机模块的通信,所述通信模块的输入端与主控制器模块的输出端连接,其输出端连接上位机模块的输入端;所述惯性传感器模块用于采集关节角度和步态轨迹信息;所述压力传感器模块用于采集足底压力信息。
5.所述压力传感器模块是由薄膜压力传感器构成的模块,安装于鞋垫中。
6.所述薄膜压力传感器的数量是8个压力传感器;所述8个薄膜压力传感器分别通过8个模数转换器与主控制器模块连接;所述8个薄膜压力传感器分别安装于两个鞋垫中,一个鞋垫中有4个,其中三个在前脚掌处,另一个在脚跟处。
7.所述鞋垫中的4个薄膜压力传感器所在位置分别对应足跟、第四跖骨、第一跖骨和大拇指,分别获取4个薄膜压力传感器所在位置的压力信号。
8.所述惯性传感器模块是由4个惯性传感器构成;所述4个惯性传感器与主控制器模块连接;所述4个惯性传感器中分别置于两条腿的大腿及小腿处。
9.所述通信模块是wifi、5g、4g或串口通信方式中的一种。
10.一种用于脑卒中患者的多维度下肢康复评定方法,其特征在于它包括以下步骤:
11.(1)利用惯性传感器获取关节角度信号,利用该信号求取并记录患者关节屈曲和伸展角度,得到患者关节屈曲和伸展角度,并分别与医学标准关节角度做比值,从而得到占比;将此占比作为关节活动度的评定依据;
12.所述步骤(1)是采用最大最小关节度算法对惯性传感器获取的关节角度信号进行处理,即分别获取患者髋关节屈曲角度a1、患者髋关节伸展角度b1、患者膝关节屈曲角度c1、患者膝关节伸展角度d1,并分别求取与标准髋关节屈曲角度a
11
、标准髋关节伸展角度b
11
、标准膝关节屈曲角度c
11
、标准膝关节伸展角度d
11
的占比,如表1所示;期中,ωa、ωb、ωc、ωd分别为患者两腿的膝关节和髋关节在屈曲和伸展时共计4个指标得分所占关节活动度得分的权重;
13.表1
[0014][0015][0016]
则,根据公式(1)即可得到关节活动度的得分rs;
[0017][0018]
(2)利用惯性传感器的获取步态轨迹信号,记录患者膝关节和髋关节的运动轨迹,并通过患者膝关节和髋关节的运动轨迹与标准膝关节和髋关节的运动轨迹的相似程度作为步态轨迹的评定依据;
[0019]
所述步骤(2)采用余弦相似度算法对惯性传感器获取的步态轨迹信号进行处理,得到并记录患者膝关节和髋关节的运动轨迹,即:选取患者髋关节运动轨迹和标准髋关节运动轨迹相同个数的点组成两个向量a1和向量b1,选取患者膝关节运动轨迹和标准膝关节运动轨迹相同个数的点组成两个向量a2和向量b2,分别计算四个向量的余弦夹角,如公式(2),公式(3),并将此余弦夹角作为步态轨迹的评定依据;
[0020][0021][0022]
则,步态轨迹的得分为公式(4)
[0023]
ts=(cosθ1×
w1+cosθ2×
w2)
×
100
ꢀꢀꢀ
(4)
[0024]
公式(4)中,可取w1=w2=0.5,w1为髋关节运动轨迹得分占步态轨迹得分的权重,w2为膝关节运动轨迹得分占步态轨迹得分的权重。
[0025]
(3)利用压力传感器获取足底压力信号,以此对患者的步态相位进行识别,记录双侧步态相位顺序,得到异常步态周期数和总步态周期数,并计算异常步态周期数占总步态周期数的占比,将此占比作为步态相位的评定依据;
[0026]
所述步骤(3)采用比例模糊逻辑分相法进行步态相位的识别,记录双侧步态相位顺序,根据步态相位识别结果,对站立前期相位、站立中期相位、站立后期相位及摆动期相位的时间间隔求得异常步态周期数和总步态周期数,从而求取异常步态周期数占总步态周期数的占比,如图4所示,具体由以下步骤构成:
[0027]
(3-1)将足底压力信号进行比例化融合处理,即:对足底压力信号进行同一时刻的求和取比例运算,解决因个体差异产生的识别误差,如公式(5)-(8)所示:
[0028][0029][0030][0031][0032]
其中,k1、k2、k3、k4分别为4个压力传感器信号占足底压力信号总和的比例;f1、f2、f3、f4分别代表4个压力传感器在同一时刻所受的压力;
[0033]
(3-2)将步骤(3-1)得到的比例融合后的数据进行模糊化处理,确定适当的隶属度函数,由于经步骤(3-1)比例化融合后的4个压力传感器信号占足底压力信号总和的比例数据,即k1、k2、k3、k4,的取值范围均在0-1之间,为消除了传统步态阶段划分的尖锐边界,选用指数函数作为隶属度函数,如公式(9)所示:
[0034][0035]
其中,f(ki)是函数的输出,ki是步骤(3-1)得到的4个压力传感器信号占足底压力信号总和的比例k1、k2、k3、k4,k
0i
是比例阈值,s为灵敏度系数;
[0036]
(3-3)由于如步骤(3-2)中公式(9)所示的隶属度函数是对称函数,因此,为了描述比例值ki接近1或接近0的程度,可直接取步骤(3-2)中公式(9)的反函数,并将f(ki)分为fh(ki)和f
l
(ki)两部分,fh(ki)代表比例值ki接近于1的程度,f
l
(ki)表示比例值ki接近于0的程度,分别如公式(10)和公式(11)所示;
[0037][0038][0039]
(3-4)基于步骤(3-3)中的公式(10)和公式(11)的函数输出,设置模糊逻辑规则
表,如表2所示,医学标准将步态分为六个相位,分别为初始接触,负载响应,站立中期,站立后期,预期摆动期和摆动后期,由于初始接触和负载响应,站立后期和预摆动后期的力学区分程度低。因此将它们划为一类,称为站立前期和站立后期,比例模糊逻辑分相法进行步态相位的识别时,将步态重新分成四个时相位,即:站立前期,站立中期,站立后期,摆动期;
[0040]
表2
[0041] 足跟k1第四跖骨k2第一跖骨k3大拇指k4站立前期ash*ll站立中期bs*hhl站立后期csl**h摆动期dsllll
[0042]
由表2,可以得出如公式(12)-(15)所示的站立前期、站立中期、站立后期及摆动期的分相公式,即为患者的步态相位的分相结果;
[0043]
as=fh(k1)
×fl
(k3)
×fl
(k4)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0044]
bs=fh(k2)
×fh
(k3)
×fl
(k4)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0045]
cs=f
l
(k1)
×fh
(k4)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0046]
ds=f
l
(k1)
×fl
(k2)
×fl
(k3)
×fl
(k4)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0047]
其中,当ki>k
0i
时,模糊集处于“大”的状态,记为“h”,当ki<k
0i
时,模糊集处于“小”的状态,记为“l”,若此时无状态,则记为“*”;
[0048]
(3-5)基于步骤(3-4)中的公式(12)-(15)的输出,计算步态相位占一个步态周期的持续时间:一个步态周期包含站立前期、站立中期、站立后期和摆动期,且步态相位顺序为站立前期-》站立中期-》站立后期-》摆动期;将步态相位持续时间与医学标准的步态相位时间进行比较,为考虑个体差异性,将医学标准的步态相位持续时间分为站立前期as占一个步态周期的8%-12%,站立中期bs占一个步态周期18%-22%,站立后期cs占一个步态周期28%-32%,摆动期ds占一个步态周期38-42%;最终通过判断步态相位持续时间是否超出医学标准的步态相位持续时间规定的范围,若超出则为异常步态周期,没有超出则为正常步态周期;将异常步态周期数与总步态周期数的占比作为步态相位的评定依据,总步态周期数为异常步态周期数和正常步态周期数的和,异常步态周期数为异常步态周期的和,正常步态周期为正常步态周期数的和;此时,步态相位得分为公式(16)所示:
[0049][0050]
其中,ps为步态相位得分,an为异常步态周期数,tn为总步态周期数。
[0051]
(4)由于关节活动度、步态轨迹及步态相位在多维度下肢康复评定中所起的作用不同,为获得科学准确的康复评定结果,需要将三者综合进行评定,利用层次分析法确定步骤(1)得到的关节活动度评价依据、步骤(2)得到的步态轨迹评价依据以及步骤(3)得到的步态相位评价依据所占的权重:
[0052]
(4-1)根据层次分析法的分析方式,将层次分析法分为三个层次,即:目标层、准则层和方案层;其中,所述目标层是下肢关节功能的恢复程度;所述准则层是步骤(1)得到的关节活动度评价依据、步骤(2)得到的步态轨迹评价依据以及步骤(3)得到的步态相位评价依据;所述方案层是步骤(1)得到的关节活动度评价依据、步骤(2)得到的步态轨迹评价依
据以及步骤(3)得到的步态相位评价依据所占的权重系数;
[0053]
(4-2)并利用“1-9尺度法”对关节活动度,步态轨迹,足底压力的占比大小进行量化,将准则层中步骤(1)得到的关节活动度评价依据、步骤(2)得到的步态轨迹评价依据以及步骤(3)得到的步态相位评价依据进行两两对比,组成一个的成对比较表格,该表格行与列的标题项均为评价指标,且顺序一致;
[0054]
表3
[0055] 关节活动度步态轨迹步态相位关节活动度a
11a12a13
步态轨迹a
21a22a23
步态相位a
31a32a33
[0056]
(4-4)由步骤(4-2)得到的三行三列的表格,可以得到如式(17)所示的成对比较矩阵,即:判断矩阵a:
[0057][0058]
判断矩阵a中每一个元素与三行三列的表格中的每个单元格中的数据对应;
[0059]
(4-5)对判断矩阵a的列向量进行归一化,同时对行求和并进行归一化,则可得到公式(18):
[0060][0061]
其中,w1、w2、w3关节活动度权重、步态轨迹权重及步态相位权重;
[0062]
(4-6)对公式(18)进行一致性验证,得到公式(19):
[0063][0064]
因aω=λω,则:
[0065][0066]
其中n为矩阵阶次;
[0067]
(4-7)随机一致性指标ri,如表4所示:
[0068]
表4
[0069]
n1234567891011ri000.580.901.121.241.321.411.451.491.51
[0070]
进一步可以得到不一致性指标ci和一致性比率cr,分别如公式(21)和公式(22)所示:
[0071][0072]
[0073]
若一致性比率cr<0.1时,则认为表3的不一致程度在容许范围之内,有满意的一致性,通过一致性检验,并可用式(18)归一化特征向量ω作为权向量;若一致性比率不符合要求,则要重新按照步骤(4-2)和步骤(4-3)构造成对比较矩阵构建判断矩阵,再利用步骤(4-5)~(4-7)进行一致性验证,最终求得各层面所占权重。
[0074]
所述步骤(4)中表3的数值为
″
1-9尺度法”提供的官方数值,数值使用的是santy的1-9标度方法给出的,为公知内容。实施例中,表3数值内容是由康复医师根据经验参考santy的1-9标度方法确定,得到的是表3-1所示的具体数值;
[0075]
表3-1
[0076] 关节活动度步态轨迹步态相位关节活动度11/31/4步态轨迹311/2步态相位421
[0077]
表中,用“数字1”表示行与列两个评价依据同等重要,“数字3”表示行比列稍微重要,“数字5”表示行比列明显重要,“数字2”表示行比列的重要程度介于“数字1”和“数字3”之间,“数字4”表示行比列的重要程度介于“数字3”和“数字5”之间,分数部分为列比行的重要程度,如“数字1/3”表示列比行稍微重要;
[0078]
则进一步得到:
[0079][0080]
对判断矩阵a的列向量进行归一化,同时对行求和并进行归一化,则可得到
[0081][0082]
即:关节活动度权重为0.123,步态轨迹权重为0.32,步态相位权重为0.557;
[0083]
进行一致性验证,得到:
[0084][0085]
因aω=λω,则:
[0086][0087]
其中n为矩阵阶次;
[0088]
进一步可以得到不一致性指标ci和一致性比率cr:
[0089][0090]
[0091]
因此,表3-1的不一致程度在容许范围之内,有满意的一致性,通过一致性检验,此时得到的归一化特征向量ω,即:关节活动度权重为0.123,步态轨迹权重为0.32,步态相位权重为0.557,能够作为评价指标的权重。
[0092]
(5)根据步骤(4)确定的评价指标的权重,结合步骤(1)的关节活动度的得分rs,步骤(2)的步态轨迹的得分ts,步骤(3的)步态相位得分ps,即可获取综合康复评价得分,为公式(23)所示
[0093]zs
=w1×rs
+w2×
ts+w3×
psꢀꢀꢀꢀ
(23)
[0094]
其中zs为综合康复评价得分;
[0095]
(6)根据公式(23)得到的综合康复评价得分,对患者康复效果进行评定:规定90分以上康复效果为优秀,80-90分之间康复效果为良好,70-80分之间康复效果为一般,60分以下康复效果为差;当患者综合康复评价得分处于60分以下时,给出
″
需加强康复训练强度
″
的结论,且该阶段的训练方式应趋向于被动康复训练方式;当患者综合康复评价得分处于70-80分之间时,给出
″
可适当降低康复训练强度
″
的结论,在被动训练方式的基础上适当增加主动训练方式;当患者综合康复评价得分处于80-90分之间时,给出
″
可以将主动训练方式作为主要训练方式
″
的结论,并适当增加对抗式训练方式;当患者综合康复评价得分处于90分以上时,给出
″
可以将对抗式训练方式作为主要训练方式
″
的建议。
[0096]
本发明的优越性:多维度下肢康复评定方法及装置,通过对三个层面构成的评定方法进行分析,分别利用最大最小关节度算法、余弦相似度算法、比例模糊逻辑分相法对患者的下肢关节角度、步态轨迹及足底压力进行处理,并通过层次分析法实现了对关节活动度、步态轨迹和步态相位三个层面的评定方法的权重进行确定;解决了因个体差异产生的步态相位误差,以及设备价格昂贵,便携性较差等问题,评定精度高,评定结果准确,具有较高的研究意义。
附图说明
[0097]
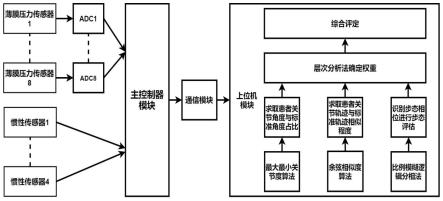
图1为本发明所涉一种用于脑卒中患者的多维度下肢康复评定装置的整体结构示意图。
[0098]
图2为本发明所涉一种用于脑卒中患者的多维度下肢康复评定装置中薄膜压力传感器及惯性传感器的安装位置分布示意图。
[0099]
图3为本发明所涉一种用于脑卒中患者的多维度下肢康复评定方法的流程图。
[0100]
图4为本发明所涉一种用于脑卒中患者的多维度下肢康复评定方法中比例模糊逻辑分相法的流程结构示意图。
具体实施方式
[0101]
实施例:本发明实施例针对脑卒中患者下肢康复评定的问题,设计了一种多维度下肢康复评定方法及装置。
[0102]
图1为本发明所涉一种用于脑卒中患者的多维度下肢康复评定装置的整体结构示意图,首先该采集系统由1个主控制器模块,压力传感器模块,压力传感器模块包含8个薄膜压力传感器,惯性传感器模块,惯性传感器模块包含4个惯性传感器,1个通信模块,1双鞋垫组成。其中通信模块不限于蓝牙,wifi,5g,4g,串口等。薄膜压力传感器需经adc转换后传输
至主控制器模块,主控制器模块将adc转换后的数字信号转化为压力值,经通讯模块传输至上位机模块进行处理。惯性传感器经主控制器模块发送零度校准指令后进行数据的传送,并最终经主控制器模块通过通讯模块传输至上位机模块进行处理。惯性传感器数据包含关节角度及关节轨迹数据。关节角度,关节轨迹数据及压力数据处理过程均在上位机模块中进行,上位机模块中包含最大最小关节度算法,余弦相似度算法,比例模糊逻辑分相法的实现及综合康复评定。
[0103]
图2为本发明所涉一种用于脑卒中患者的多维度下肢康复评定装置中薄膜压力传感器及惯性传感器的安装位置分布示意图,惯性传感器1位于大腿处,用于采集髋关节活动度和髋关节轨迹,惯性传感器2位于小腿处,用于采集膝关节活动度和髋关节轨迹,惯性传感器通过粘带固定患者的大腿及小腿处。8个薄膜压力传感器分别安装于两个鞋垫中,一个鞋垫中有4个,其中三个在前脚掌处,另一个在脚跟处,压力传感器4,压力传感器3,压力传感器2,压力传感器1,分别对应足跟、第四跖骨、第一跖骨和大拇指,压力传感器通过强力胶固定于鞋垫处,并将此鞋垫置于患者鞋中。
[0104]
图3为本发明所涉一种用于脑卒中患者的多维度下肢康复评定方法的流程图。首先经上位机模块控制主控制器模块通过惯性传感器实现关节角度的采集,并将采集数据传输至通信模块,并由通信模块传输至上位机模块,在上位机模块中经最大最小关节度算法处理,得出关节活动度度评定结果,关节活动度评定内容,具体步骤如下所示,为确保惯性传感器输出精度,初始化惯性传感器时,需向惯性传感器发送以当前位置为零角度的零度校准指令:
[0105]
(1)利用惯性传感器获取关节角度信号,利用该信号求取并记录患者关节屈曲和伸展角度,得到患者关节屈曲和伸展角度,并分别与医学标准关节角度做比值,从而得到占比;将此占比作为关节活动度的评定依据;
[0106]
所述步骤(1)是采用最大最小关节度算法对惯性传感器获取的关节角度信号进行处理,即分别获取患者髋关节屈曲角度a1、患者髋关节伸展角度b1、患者膝关节屈曲角度c1、患者膝关节伸展角度d1,并分别求取与标准髋关节屈曲角度a
11
、标准髋关节伸展角度b
11
、标准膝关节屈曲角度c
11
、标准膝关节伸展角度d
11
的占比,如表1所示;期中,ωa、ωb、ωc、ωd分别为患者两腿的膝关节和髋关节在屈曲和伸展时共计4个指标得分所占关节活动度得分的权重;
[0107]
表1
[0108][0109]
则,根据公式(1)即可得到关节活动度的得分rs;
[0110][0111]
其次经上位机模块控制主控制器模块通过惯性传感器实现关节轨迹的采集,并将采集数据传输至通信模块,并由通信模块传输至上位机模块,在上位机模块中并经余弦相似度算法处理,得出步态轨迹评定结果,具体的步态轨迹评定内容如下所示:
[0112]
(2)利用惯性传感器的获取步态轨迹信号,记录患者膝关节和髋关节的运动轨迹,并通过患者膝关节和髋关节的运动轨迹与标准膝关节和髋关节的运动轨迹的相似程度作为步态轨迹的评定依据;
[0113]
所述步骤(2)采用余弦相似度算法对惯性传感器获取的步态轨迹信号进行处理,得到并记录患者膝关节和髋关节的运动轨迹,即:选取患者髋关节运动轨迹和标准髋关节运动轨迹相同个数的点组成两个向量a1和向量b1,选取患者膝关节运动轨迹和标准膝关节运动轨迹相同个数的点组成两个向量a2和向量b2,分别计算四个向量的余弦夹角,如公式(2),公式(3),并将此余弦夹角作为步态轨迹的评定依据;
[0114][0115][0116]
则,步态轨迹的得分为公式(4)
[0117]
ts=(cosθ1×
w1+cosθ2×
w2)
×
100
ꢀꢀꢀ
(4)
[0118]
公式(4)中,可取w1=w2=0.5,w1为髋关节运动轨迹得分占步态轨迹得分的权重,w2为膝关节运动轨迹得分占步态轨迹得分的权重。
[0119]
其次经上位机模块控制主控制器模块通过薄膜压力传感器实现足底压力的采集,并将采集数据传输至通信模块,并由通信模块传输至上位机模块,在上位机模块中并经比例模糊逻辑分相法进行处理,得出步态相位评定结果,具体的步态相位评定内容如下所示:
[0120]
(3)利用压力传感器获取足底压力信号,以此对患者的步态相位进行识别,记录双侧步态相位顺序,得到异常步态周期数和总步态周期数,并计算异常步态周期数占总步态周期数的占比,将此占比作为步态相位的评定依据;
[0121]
所述步骤(3)采用比例模糊逻辑分相法进行步态相位的识别,记录双侧步态相位
顺序,根据步态相位识别结果,对站立前期相位、站立中期相位、站立后期相位及摆动期相位的时间间隔求得异常步态周期数和总步态周期数,从而求取异常步态周期数占总步态周期数的占比,如图4所示,具体由以下步骤构成:
[0122]
(3-1)将足底压力信号进行比例化融合处理,即:对足底压力信号进行同一时刻的求和取比例运算,解决因个体差异产生的识别误差,如公式(5)-(8)所示:
[0123][0124][0125][0126][0127]
其中,k1、k2、k3、k4分别为4个压力传感器信号占足底压力信号总和的比例;f1、f2、f3、f4分别代表4个压力传感器在同一时刻所受的压力;
[0128]
(3-2)将步骤(3-1)得到的比例融合后的数据进行模糊化处理,确定适当的隶属度函数,由于经步骤(3-1)比例化融合后的4个压力传感器信号占足底压力信号总和的比例数据,即k1、k2、k3、k4,的取值范围均在0-1之间,为消除了传统步态阶段划分的尖锐边界,选用指数函数作为隶属度函数,如公式(9)所示:
[0129][0130]
其中,f(ki)是函数的输出,ki是步骤(3-1)得到的4个压力传感器信号占足底压力信号总和的比例k1、k2、k3、k4,k
0i
是比例阈值,s为灵敏度系数;
[0131]
(3-3)由于如步骤(3-2)中公式(9)所示的隶属度函数是对称函数,因此,为了描述比例值ki接近1或接近0的程度,可直接取步骤(3-2)中公式(9)的反函数,并将f(ki)分为fh(ki)和f
l
(ki)两部分,fh(ki)代表比例值ki接近于1的程度,f
l
(ki)表示比例值ki接近于0的程度,分别如公式(10)和公式(11)所示;
[0132][0133][0134]
(3-4)基于步骤(3-3)中的公式(10)和公式(11)的函数输出,设置模糊逻辑规则表,如表2所示,医学标准将步态分为六个相位,分别为初始接触,负载响应,站立中期,站立后期,预期摆动期和摆动后期,由于初始接触和负载响应,站立后期和预摆动后期的力学区分程度低。因此将它们划为一类,称为站立前期和站立后期,比例模糊逻辑分相法进行步态相位的识别时,将步态重新分成四个时相位,即:站立前期,站立中期,站立后期,摆动期;
[0135]
表2
[0136] 足跟k1第四跖骨k2第一跖骨k3大拇指k4站立前期ash*ll站立中期bs*hhl站立后期csl**h摆动期dsllll
[0137]
由表2,可以得出如公式(12)-(15)所示的站立前期、站立中期、站立后期及摆动期的分相公式,即为患者的步态相位的分相结果;
[0138]
as=fh(k1)
×fl
(k3)
×fl
(k4)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0139]
bs=fh(k2)
×fh
(k3)
×fl
(k4)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0140]
cs=f
l
(k1)
×fh
(k4)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0141]
ds=f
l
(k1)
×fl
(k2)
×fl
(k3)
×fl
(k4)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0142]
其中,当ki>k
0i
时,模糊集处于“大”的状态,记为“h”,当ki<k
0i
时,模糊集处于“小”的状态,记为“l”,若此时无状态,则记为“*”;
[0143]
(3-5)基于步骤(3-4)中的公式(12)-(15)的输出,计算步态相位占一个步态周期的持续时间:一个步态周期包含站立前期、站立中期、站立后期和摆动期,且步态相位顺序为站立前期-》站立中期-》站立后期-》摆动期;将步态相位持续时间与医学标准的步态相位时间进行比较,为考虑个体差异性,将医学标准的步态相位持续时间分为站立前期as占一个步态周期的8%-12%(实施例中取10%),站立中期bs占一个步态周期18%-22%(实施例中取20%),站立后期cs占一个步态周期28%-32%(实施例中取30%),摆动期ds占一个步态周期38-42%(实施例中取40%);最终通过判断步态相位持续时间是否超出医学标准的步态相位持续时间规定的范围,若超出则为异常步态周期,没有超出则为正常步态周期;将异常步态周期数与总步态周期数的占比作为步态相位的评定依据,总步态周期数为异常步态周期数和正常步态周期数的和,异常步态周期数为异常步态周期的和,正常步态周期为正常步态周期数的和;此时,步态相位得分为公式(16)所示:
[0144][0145]
其中,ps为步态相位得分,an为异常步态周期数,tn为总步态周期数。
[0146]
最后实现层次分析法确定各评定层面权重:
[0147]
(4)由于关节活动度、步态轨迹及步态相位在多维度下肢康复评定中所起的作用不同,为获得科学准确的康复评定结果,需要将三者综合进行评定,利用层次分析法确定步骤(1)得到的关节活动度评价依据、步骤(2)得到的步态轨迹评价依据以及步骤(3)得到的步态相位评价依据所占的权重:
[0148]
(4-1)根据层次分析法的分析方式,将层次分析法分为三个层次,即:目标层、准则层和方案层;其中,所述目标层是下肢关节功能的恢复程度;所述准则层是步骤(1)得到的关节活动度评价依据、步骤(2)得到的步态轨迹评价依据以及步骤(3)得到的步态相位评价依据;所述方案层是步骤(1)得到的关节活动度评价依据、步骤(2)得到的步态轨迹评价依据以及步骤(3)得到的步态相位评价依据所占的权重系数;
[0149]
(4-2)并利用“1-9尺度法”对关节活动度,步态轨迹,足底压力的占比大小进行量化,将准则层中步骤(1)得到的关节活动度评价依据、步骤(2)得到的步态轨迹评价依据以
及步骤(3)得到的步态相位评价依据进行两两对比,组成一个的成对比较表格,如表3-1所示该表格行与列的标题项均为评价指标,且顺序一致;
[0150]
表3-1
[0151] 关节活动度步态轨迹步态相位关节活动度11/31/4步态轨迹311/2步态相位421
[0152]
表中,用“数字1”表示行与列两个评价依据同等重要,“数字3”表示行比列稍微重要,“数字5”表示行比列明显重要,“数字2”表示行比列的重要程度介于“数字1”和“数字3”之间,“数字4”表示行比列的重要程度介于“数字3”和“数字5”之间,分数部分为列比行的重要程度,如“数字1/3”表示列比行稍微重要;
[0153]
以康复医师的指导可以得到如式(24)所示的比较矩阵,即:判断矩阵a:
[0154][0155]
对判断矩阵a的列向量进行归一化,同时对行求和并进行归一化,则可得到公式(25):
[0156][0157]
对公式(18)进行一致性验证,得到公式(26):
[0158][0159]
因aω=λω,则:
[0160][0161]
其中n为矩阵阶次;
[0162]
随机一致性指标ri,如表4所示:
[0163]
表4
[0164]
n1234567891011ri000.580.901.121.241.321.411.451.491.51
[0165]
通过表4所示的随机一致性指标ri,进一步可以得到不一致性指标ci和一致性比率cr,分别如公式(28)和公式(29)所示:
[0166][0167][0168]
由于一致性比率cr<0.1,认为判断矩阵a的不一致程度在容许范围之内,有满意
的一致性,通过一致性检验,并可用式(25)归一化特征向量ω作为权向量;最后得获得关节活动度权重为0.123,步态轨迹权重为0.32,步态相位权重为0.557。并最终推得综合康复评价得分为公式(30):
[0169]zs
=0.123
×rs
+0.32
×
ts+0.557
×
psꢀꢀꢀꢀ
(30)
[0170]
患者在获得综合康复评价得分后,可参考技术方案中步骤(5)得分范围对应的康复训练方式对康复训练内容进行调整。以加快康复效果。
[0171]
患者操作具体步骤为:
[0172]
(1)患者根据图2,穿戴好评定装置。
[0173]
(2)通过上位机模块对主控制器模块的控制进行关节活动度的评定,患者进行髋关节和膝关节的伸展和屈曲运动,在运动时需将伸展和屈曲运动角度达到自身极限,以提高评定的准确性。
[0174]
(3)通过上位机模块对主控制器模块的控制进行步态轨迹的评定,患者进行与康复训练时的步态正常行走。为确保评定准确性,在行走过程中尽量避免进行拐弯,避障等动作。
[0175]
(4)通过上位机模块对主控制器模块的控制进行步态相位的评定,患者仍进行与步骤(3)相同的动作。
[0176]
(5)评定完毕后,通过上位机模块的提示,即可获得本次综合康复评价的得分,患者可根据得分,参考技术方案中步骤(5)得分范围对应的康复训练方式对康复训练内容进行调整。
[0177]
尽管为说明目的公开了本发明的实施例和附图,但是本领域的技术人员可以理解:在不脱离本发明及所附权利要求的范围内,各种替换、变化和修改都是可能的,因此,本发明的范围不局限于实施例和附图所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1