一种基于智能中医夹板的远程实现系统的制作方法
1.本发明涉及医疗器械技术领域,特别涉及一种基于智能中医夹板的远程实现系统。
背景技术:
2.康复夹板一般指的是帮助骨折患者进行恢复所使用的夹板工具,在某些情况下,需要对康复夹板在夹持的紧固度有一定的要求。现有的做法是通过医生来帮忙夹持。但是,在一些应用场景中,医生可以无法在现场进行夹持。因此,在这些应用场景中,对于康复夹板的安装就已经有远程控制的需求。因此如何对康复夹板的安装的远程控制实现,是行业内研究的课题。
技术实现要素:
3.本发明的目的是提供一种基于智能中医夹板的远程实现系统,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
4.本发明解决其技术问题的解决方案是:提供一种基于智能中医夹板的远程实现系统,包括:远程控制端、监控装置、基础夹板、第一传动带、第一紧固力提供装置、第二传动带和第二紧固力提供装置;所述基础夹板设有柔性薄膜传感器;所述第一紧固力提供装置包括:第一壳体、第一固定端、第一传动机构、第一电源、第一控制模块、第一无线模块、第一按钮和第二按钮;所述第一控制模块分别第一无线模块和第一传动机构连接;所述第一固定端设置在第一壳体的右侧壳壁上,所述第一传动机构和第一电源均设置在第一壳体中;所述第一电源给第一控制模块、第一无线模块和第一传动机构提供电能;所述第一传动带的一端与第一固定端固定连接,所述第一传动带绕着基础夹板并与第一传动机构连接;所述第一按钮用于通过按压发出第一按压信号,所述第一控制模块根据所述第一按压信号控制第一传动机构以使得第一传动带松弛;所述第二按钮用于通过按压发出第二按压信号,所述第一控制模块根据所述第二按压信号控制第一传动机构以使得第一传动带收紧;所述第二紧固力提供装置包括:第二壳体、第二固定端、第二传动机构、第二电源、第二控制模块、第三按钮、第四按钮和第二无线模块;所述第二控制模块分别第一按钮、第二按钮、第二无线模块和第二传动机构连接;所述第二固定端设置在第二壳体的右侧壳壁上,所述第二传动机构和第二电源均设置在第二壳体中;所述第二电源给第二控制模块、第二无线模块和第二传动机构提供电能;所述第二传动带的一端与第二固定端固定连接,所述第二传动带绕着基础夹板并
与第二传动机构连接;所述第三按钮用于通过按压发出第三按压信号,所述第二控制模块根据所述第三按压信号控制第二传动机构以使得第二传动带松弛;所述第四按钮用于通过按压发出第四按压信号,所述第二控制模块根据所述第四按压信号控制第二传动机构以使得第二传动带收紧;所述监控装置包括:麦克风、扬声器、摄像头、第三控制模块和第三无线模块,所述第三控制模块分别与麦克风、扬声器、摄像头、柔性薄膜传感器和第三无线模块连接,所述远程控制端分别与第一无线模块、第二无线模块和第三无线模块连接;所述柔性薄膜传感器用于采集基础夹板的压力值,所述压力值记为实时压力值,将所述实时压力值传递给第三控制模块;所述摄像头用于采集患者设定区域的影像,所述影像记为基础夹板安装影像,并将所述基础夹板安装影像传递给第三控制模块;所述麦克风用于采集患者的声音,所述声音记为患者交流声音,将所述患者交流声音传递给第三控制模块;所述第三控制模块将所述患者交流声音、实时压力值和基础夹板安装影像通过第三无线模块传递给远程控制端;所述远程控制端用于:播放所述患者交流声音、显示所述实时压力值和基础夹板安装影像,并接收医生输入的第一调整量、第二调整量和医生交流声音,将所述第一调整量通过第一无线模块传递给第一控制模块,将第二调整量通过第二无线模块传递给第二控制模块;将所述医生交流声音通过第三无线模块传递给第三控制模块;所述第一控制模块控制第一传动机构带动第一传动带移动以使得基础夹板的实时压力值达到第一调整量;所述第二控制模块控制第二传动机构带动第二传动带移动以使得基础夹板的实时压力值达到第二调整量;所述第三控制模块控制扬声器播出所述医生交流声音。
5.进一步,本基于智能中医夹板的远程实现系统还包括:第一显示屏,所述第一显示屏设置在第一壳体中,所述第一显示屏用于显示第一调整量和实时压力值。
6.进一步,本基于智能中医夹板的远程实现系统还包括:第二显示屏,所述第二显示屏设置在第二壳体中,所述第二显示屏用于显示第二调整量和实时压力值。
7.进一步,所述第一传动机构包括:第一步进电机和第一转动轮,所述第一转动轮安装在第一步进电机的转动轴上,所述第一转动轮与第一传动带摩擦连接,所述第一转动轮用于带动第一传动带移动,所述第一步进电机与第一控制模块连接。
8.进一步,所述第二传动机构包括:第二步进电机和第二转动轮,所述第二转动轮安装在第二步进电机的转动轴上,所述第二转动轮与第二传动带摩擦连接,所述第二转动轮用于带动第二传动带移动,所述第二步进电机与第二控制模块连接。
9.进一步,所述基础夹板上开设有透气孔。
10.进一步,所述第一电源为充电电池。
11.进一步,所述第二电源为充电电池。
12.本发明的有益效果是:本基于智能中医夹板的远程实现系统通过设置远程控制
端、监控装置、第一紧固力提供装置、第二紧固力提供装置、第一传动带和第二传动带。通过远程控制端对第一紧固力提供装置和第二紧固力提供装置进行远程控制,同时,通过监控装置对控制的情况进行实时监控。本技术方案可以使得医护人员可以远程对患者安装的基础夹板的松紧程度进行控制,和对患者进行远程指导。
附图说明
13.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单说明。显然,所描述的附图只是本发明的一部分实施例,而不是全部实施例,本领域的技术人员在不付出创造性劳动的前提下,还可以根据这些附图获得其他设计方案和附图。
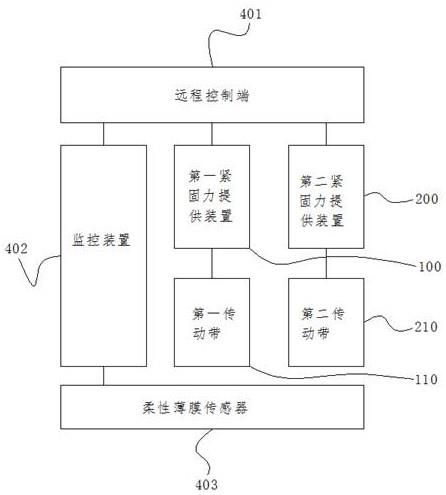
14.图1是基于智能中医夹板的远程实现系统的连接结构示意图;图2是第一紧固力提供装置的连接结构示意图;图3是第二紧固力提供装置的连接结构示意图;图4是监控装置的连接结构示意图;图5是基础夹板安装在手臂上的示意图。
具体实施方式
15.以下将结合实施例和附图对本发明的构思、具体结构及产生的技术效果进行清楚、完整地描述,以充分地理解本发明的目的、特征和效果。显然,所描述的实施例只是本发明的一部分实施例,而不是全部实施例,基于本发明的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本发明保护的范围。另外,文中所提到的所有联接/连接关系,并非单指构件直接相接,而是指可根据具体实施情况,通过添加或减少联接辅件,来组成更优的联接结构。本发明创造中的各个技术特征,在不互相矛盾冲突的前提下可以交互组合。
16.实施例1,参考图1、图2、图3、图4和图5,提供一种基于智能中医夹板的远程实现系统,包括:远程控制端401、监控装置402、基础夹板500、第一传动带110、第一紧固力提供装置100、第二传动带210和第二紧固力提供装置200。
17.所述基础夹板500设有柔性薄膜传感器403。
18.所述第一紧固力提供装置100包括:第一壳体、第一固定端、第一传动机构106、第一电源101、第一控制模块104、第一无线模块107、第一按钮102和第二按钮103。
19.所述第一控制模块104分别第一无线模块107和第一传动机构106连接。
20.所述第一固定端设置在第一壳体的右侧壳壁上,所述第一传动机构106和第一电源101均设置在第一壳体中;所述第一电源101给第一控制模块104、第一无线模块107和第一传动机构106提供电能;所述第一传动带110的一端与第一固定端固定连接,所述第一传动带110绕着基础夹板500并与第一传动机构106连接。
21.所述第一按钮102用于通过按压发出第一按压信号,所述第一控制模块104根据所述第一按压信号控制第一传动机构106以使得第一传动带110松弛。
22.所述第二按钮103用于通过按压发出第二按压信号,所述第一控制模块104根据所述第二按压信号控制第一传动机构106以使得第一传动带110收紧。
23.所述第二紧固力提供装置200包括:第二壳体、第二固定端、第二传动机构206、第二电源201、第二控制模块204、第三按钮202、第四按钮203和第二无线模块207。
24.所述第二控制模块204分别第一按钮102、第二按钮103、第二无线模块207和第二传动机构206连接。
25.所述第二固定端设置在第二壳体的右侧壳壁上,所述第二传动机构206和第二电源201均设置在第二壳体中;所述第二电源201给第二控制模块204、第二无线模块207和第二传动机构206提供电能;所述第二传动带210的一端与第二固定端固定连接,所述第二传动带210绕着基础夹板500并与第二传动机构206连接。
26.所述第三按钮202用于通过按压发出第三按压信号,所述第二控制模块204根据所述第三按压信号控制第二传动机构206以使得第二传动带210松弛。
27.所述第四按钮203用于通过按压发出第四按压信号,所述第二控制模块204根据所述第四按压信号控制第二传动机构206以使得第二传动带210收紧。
28.所述监控装置402包括:麦克风302、扬声器303、摄像头304、第三控制模块301和第三无线模块305,所述第三控制模块301分别与麦克风302、扬声器303、摄像头304、柔性薄膜传感器403和第三无线模块305连接,所述远程控制端401分别与第一无线模块107、第二无线模块207和第三无线模块305连接。
29.所述柔性薄膜传感器403用于采集基础夹板500的压力值,所述压力值记为实时压力值,将所述实时压力值传递给第三控制模块301;所述摄像头304用于采集患者设定区域的影像,所述影像记为基础夹板500安装影像,并将所述基础夹板500安装影像传递给第三控制模块301,所述麦克风302用于采集患者的声音,所述声音记为患者交流声音,将所述患者交流声音传递给第三控制模块301。
30.所述第三控制模块301将所述患者交流声音、实时压力值和基础夹板500安装影像通过第三无线模块305传递给远程控制端401。
31.所述远程控制端401用于:播放所述患者交流声音、显示所述实时压力值和基础夹板500安装影像,并接收医生输入的第一调整量、第二调整量和医生交流声音,将所述第一调整量通过第一无线模块107传递给第一控制模块104,将第二调整量通过第二无线模块207传递给第二控制模块204;将所述医生交流声音通过第三无线模块305传递给第三控制模块301。
32.所述第一控制模块104控制第一传动机构106带动第一传动带110移动以使得基础夹板500的实时压力值达到第一调整量。
33.所述第二控制模块204控制第二传动机构206带动第二传动带210移动以使得基础夹板500的实时压力值达到第二调整量;所述第三控制模块301控制扬声器303播出所述医生交流声音。
34.本基于智能中医夹板的远程实现系统主要的目的是可以使得医护人员可以远程对患者安装的基础夹板500的松紧程度进行控制,和对患者进行远程指导。
35.当患者需要进行基础夹板500的安装的时候,其可以委托朋友或者自行将基础夹板500放置到需要夹持的身体部位上。基础夹板500的数量根据患者的实际需求而定。当放置好基础夹板500后,然后就可以使用第一传动带110、第一紧固力提供装置100、第二传动
带210和第二紧固力提供装置200了。
36.对于第一紧固力提供装置100,可以通过按压第一按钮102,第一按钮102产生第一按压信号,第一控制模块104根据所述第一按压信号来控制第一传动机构106运动,从而使得第一传动带110处于松弛状态。第一传动带110松弛到可以将基础夹板500围绕,然后通过按压第二按钮103。第二按钮103产生第二按压信号,第一控制模块104根据第二按压信号控制第一传动机构106运动,从而使得第一传动带110进行收紧。第一传动带110通过收紧作用在基础夹板500上,使得基础夹板500对夹持的身体部位产生紧固力。根据作用力与反作用力的原理,基础夹板500所受到的压力值在数值上等于紧固力。因此,基础夹板500上的柔性薄膜传感器403得到实时压力值反映了基础夹板500对夹持的身体部位的紧固程度。
37.患者通过第一按钮102和第二按钮103使得基础夹板500处于基本的安装状态,这个时候,远程的医护人员可以通过监控装置402得到实时压力值。柔性薄膜传感器403通过对实时压力值的获取,并将所述实时压力值通过第三无线模块305传递给远程控制端401。同时,监控装置402通过摄像头304实时得到患者在安装基础夹板500的影像,即得到基础夹板500安装影像;患者还可以通过麦克风302将其的声音传递给医护,即麦克风302获取患者的患者交流声音,并通过第三控制模块301、第三无线模块305传递给远程控制端401。在远程控制端401中,医护输入医生交流声音,医生交流声音通过第三无线模块305传递到第三控制模块301。第三控制模块301控制扬声器303将医生交流声音输出。通过这样,患者和医生实现了远程的语音交流。从而医生可以对患者在基础夹板500的安装上进行指导。
38.患者在对基础夹板500进行基本安装后,这时,医护则可以通过远程对基础夹板500的紧固程度进行远程控制了。
39.基础夹板500的实时压力值通过第三无线模块305发送给远程控制端401。医护通过实时压力值的情况进行调整,医护可以通过在远程控制端401中输入第一调整量和第二调整量。此时第一控制模块104通过第一无线模块107得到第一调整量,第二控制模块204通过第二无线模块207得到第二调整量,第一控制模块104根据第一调整量对第一传动带110的松紧程度进行调整,第二控制模块204根据第二调整量对第二传动带210的松紧程度进行调整。
40.通过这样,医护可以实现对基础夹板500的松紧程度进行控制调整了。从而实现对基础夹板500进行准确的安装。
41.在完成了对基础夹板500的准确固定后,此时,患者可以通过绷带将基础夹板500进行缠绕,从而对基础夹板500的固定进行保持。绷带缠绕完毕后,患者则可以对第一传动带110、第一紧固力提供装置100、第二传动带210和第二紧固力提供装置200进行拆除。拆除过程为:患者可以按压第一按钮102,从而使得第一控制模块104控制第一传动机构106带动第一传动带110松弛,待第一传动带110松弛后,就可以将第一紧固力提供装置100取出。患者可以按压第三按钮202,从而使得第二控制模块204控制第二传动机构206带动第二传动带210松弛,待第二传动带210松弛后,就可以将第二紧固力提供装置200取出。
42.为了便于患者得知基础夹板500的松紧程度的基本情况,在一些优选的具体实施例中,本基于智能中医夹板的远程实现系统还包括:第一显示屏105,所述第一显示屏105设置在第一壳体中,所述第一显示屏105用于显示第一调整量和实时压力值。
43.在一些优选的具体实施例中,本基于智能中医夹板的远程实现系统还包括:第二
显示屏205,所述第二显示屏205设置在第二壳体中,所述第二显示屏205用于显示第二调整量和实时压力值。
44.在一些优选的具体实施例中,所述第一传动机构106包括:第一步进电机和第一转动轮,所述第一转动轮安装在第一步进电机的转动轴上,所述第一转动轮与第一传动带110摩擦连接,所述第一转动轮用于带动第一传动带110移动,所述第一步进电机与第一控制模块104连接。
45.当第一传动带110需要移动的时候,第一步进电机的转动轴可以带动第一转动轮,由于第一转动轮与第一传动带110摩擦连接,因此,第一转动轮可以带动第一传动带110转动,从而实现第一传动带110的移动。
46.在一些优选的具体实施例中,所述第二传动机构206包括:第二步进电机和第二转动轮,所述第二转动轮安装在第二步进电机的转动轴上,所述第二转动轮与第二传动带210摩擦连接,所述第二转动轮用于带动第二传动带210移动,所述第二步进电机与第二控制模块204连接。
47.当第二传动带210需要移动的时候,第二步进电机的转动轴可以带动第二转动轮,由于第二转动轮与第二传动带210摩擦连接,因此,第二转动轮可以带动第二传动带210转动,从而实现第二传动带210的移动。
48.为了使得基础夹板500具有一定的透气性,在一些优选的具体实施例中,所述基础夹板500上开设有透气孔510。
49.需要说明的是,基础夹板500的形状可以根据需要进行设定,一般基础夹板500的形状符合人体工学。
50.在一些优选的具体实施例中,所述第一电源101为充电电池。所述第二电源201为充电电池。
51.以上对本发明的较佳实施方式进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做出种种的等同变型或替换,这些等同的变型或替换均包含在本技术权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1