基于机器学习的扭矩模型指导种植窝洞个性化制备方法
1.本发明涉及口腔修复技术领域,更具体的说是涉及一种基于机器学习的扭矩模型指导种植窝洞个性化制备方法。
背景技术:
2.种植体初期稳定性是影响种植手术长期成功率的重要因素。临床上通常将植入种植体时扭力扳手加力的最后扭矩值来表示种植体初期稳定性。影响种植体初期稳定性的因素很多,比如种植体周围骨质和骨量,种植体的长度、直径、几何形状,表面处理,外科备洞技术等。然而,在临床实践中,根据种植体厂商推荐的方案进行外科备洞,由于不同患者骨质情况存在差异,不同种植体形貌等原因往往会出现初次植入种植体后扭矩不足,需进行再次备洞调整,甚至由于过度钻孔,造成初期稳定性无法达到预期的后果,影响诊疗效果。因此如何保证种植体初期稳定性是本领域技术人员亟需解决的问题。
技术实现要素:
3.有鉴于此,本发明提供了一种基于机器学习的扭矩模型指导种植窝洞个性化制备方法,克服上上述缺陷。
4.为了实现上述目的,本发明提供如下技术方案:
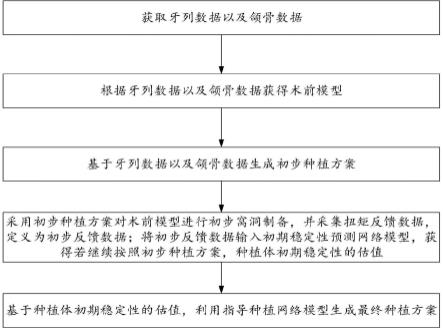
5.一种基于机器学习的扭矩模型指导种植窝洞个性化制备方法,具体步骤为:
6.数据获取:获取牙列数据以及颌骨数据;
7.模型制备:根据牙列数据以及颌骨数据获得术前模型;
8.初步种植方案生成:基于牙列数据以及颌骨数据生成初步种植方案;
9.初期稳定性预测:采用初步种植方案对术前模型进行初步窝洞制备,并采集扭矩反馈数据,定义为初步反馈数据;将初步反馈数据输入初期稳定性预测网络模型,获得若继续按照初步种植方案,种植体初期稳定性的估值;
10.最终种植方案生成:基于种植体初期稳定性的估值,利用指导种植网络模型生成最终种植方案。
11.可选的,根据口腔cbct获得颌骨数据。
12.可选的,初步种植方案包括种植体的型号、直径以及长度。
13.可选的,反馈数据依靠扭矩传感器获得。
14.可选的,初期稳定性预测网络模型的构建步骤为:
15.训练数据获取:根据不同钻针在不同骨质使用过程中力矩的各项数据生成训练集;
16.模型构建:确定输入变量以及输出变量,并根据输入变量以及输出变量,建立初步网络模型;
17.模型训练:基于训练集对初步网络模型进行训练,获得初期稳定性预测网络模型。
18.可选的,初步网络模型的输入变量为:颌骨数据、逐级扩孔过程中每一钻的深度、
直径、最大阻力矩、最小阻力矩以及种植体长度、直径、型号;输出变量为:种植体初期稳定性。
19.可选的,指导种植网络模型中的输入变量为:颌骨数据、逐级扩孔过程中第一钻以及第二钻的深度、直径、最大阻力矩、最小阻力矩、种植体初期稳定性的估值;输出变量为最终种植窝洞的孔径、深度,最后一钻的直径、深度以及种植体长度、直径、型号。
20.可选的,还包括运动轨迹规划:将最终种植方案输入机械臂控制系统,确定机械臂目标位姿后进行逆运动学求解。
21.经由上述的技术方案可知,与现有技术相比,本发明公开了一种基于机器学习的扭矩模型指导种植窝洞个性化制备方法,基于扭矩传感器可实时检测当前备洞的扭矩情况,为初期稳定性的预测提供了数据支持;本发明通过机器学习构建初期稳定性预测网络模型和指导种植网络模型,协同对种植过程的各项参数对不同骨质的患者所需备洞形态进行个性化指导,并且可以精确制备出所需窝洞形貌,使不同骨质的患者均可获得良好的初期稳定性。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
23.图1为本发明的方法流程示意图;
24.图2为本发明的初期稳定性预测网络模型结构示意图。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.本发明实施例公开了一种基于机器学习的扭矩模型指导种植窝洞个性化制备方法,如图1所示,具体步骤为:
27.步骤1、获取牙列数据以及颌骨数据;
28.其中,通过光学扫描仪获取牙列数据;通过cbct获取颌骨数据。
29.步骤2、根据牙列数据以及颌骨数据获得术前模型;
30.步骤3、基于牙列数据以及颌骨数据生成初步种植方案,具体为:
31.通过患者术前cbct获得种植位点颌骨宽度和高度,制定初步种植方案,即种植体型号、直径、长度;
32.初期稳定性预测:采用初步种植方案对术前模型进行初步窝洞制备,并采集扭矩反馈数据,定义为初步反馈数据;将初步反馈数据输入初期稳定性预测网络模型,获得若继续按照初步种植方案,种植体初期稳定性的估值;具体为:
33.力反馈系统获得逐级钻孔时第一钻、第二钻的最大、最小阻力矩,医生给出或机器
人系统通过导航获得钻孔深度和孔径;将上述值输入网络模型f(x)中,输出若继续按照初步种植方案,种植体初期稳定性的估值。
34.其中初期稳定性预测网络模型的构建过程为:
35.将临床种植过程中不同钻针在不同骨质使用过程中力矩的各项数据作为数据集,输入变量x为cbct中颌骨情况(宽度w、高度h),逐级扩孔过程中每一钻的深度pn、直径dn、最大阻力矩ω
1n
,最小阻力矩ω
2n
,种植体长度l、直径d、型号m;输出变量为种植体初期稳定性(抗扭力矩数值p)。通过机器学习算法,建立输入和输出变量的映射关系,并训练出网络模型p1=f(x1),如图2所示。其中,“黑匣子”隐含层代表患者不易被定量描述的骨质。
36.其中,利用种植系统,或在种植手机机头上安装扭矩传感器,实时反馈备洞和旋入种植体时的阻力矩。
37.步骤4、基于种植体初期稳定性的估值,利用指导种植网络模型生成最终种植方案。
38.具体为:针对初期稳定性预测网络模型中给出的估值,判断该初期稳定性是否满足要求,同时根据患者颌骨数据确定种植体的初期稳定性。
39.若要达到特定的初期稳定性,则在指导种植网络模型中输入具体初期稳定性数值,则系统根据模型输出达到该数值的最佳种植窝洞孔径d、深度p,最后一钻的直径d
n+1
、深度p
n+1
和种植体长度l、直径d、型号m。
40.其中指导种植网络模型的构建:将临床种植过程中不同钻针在不同骨质使用过程中力矩的各项数据作为数据集,输入变量为cbct中颌骨情况(宽度w、高度h),逐级扩孔过程中第一钻、第二钻的深度p1、p2、直径d1、d2、最大阻力矩ω
11
,最小阻力矩ω
22
,最终种植体植入的初期稳定性p,输出变量为达到该初期稳定性所应用的最终种植窝洞孔径d、深度p,最后一钻的直径d
n+1
、深度p
n+1
,所选用的种植体长度l、直径d、型号m。通过机器学习算法,建立输入和输出变量的映射关系,并训练出网络模型p2=f(x2)。
41.通过上述两个网络模型确定种植窝洞孔径d、深度p,最后一钻的直径d
n+1
、深度p
n+1
和种植体长度l、直径d、型号m后,医生根据需要调整种植方案或输入机械臂控制系统,确定机械臂目标位姿后进行逆运动学求解。基于rrt算法对机械臂执行系统末端到达目标位姿的运动轨迹进行规划,完成种植手术。
42.本发明通过机器学习构建初期稳定性预测网络模型和指导种植网络模型,协同对种植过程的各项参数对不同骨质的患者所需备洞形态进行个性化指导,并且可以精确制备出所需窝洞形貌,使不同骨质的患者均可获得良好的初期稳定性。
43.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
44.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1