基于腕关节运动学模型的转动轴线动态偏移量测量方法
1.本发明属于人体工程技术领域,尤其涉及一种基于腕关节运动学模型的转动轴线动态偏移量测量方法。
背景技术:
2.手腕是人体连接手掌和前臂的部位,如图1所示,手腕的腕骨100前端与手掌的掌骨400连接,手腕的腕骨100后端与前臂的桡骨200和尺骨300连接,由于腕关节复杂的生理解剖结构,手腕在进行掌屈/背屈和桡偏/尺偏两自由度的运动时,其转动轴线并不是固定的,而是随着关节的运动而发生变化,其相对于固定轴线会产生一个动态轴线偏移量。此外,手臂表面皮肤的变形、穿戴绑具与皮肤的相对滑动等都可能导致腕关节运动时的转动轴线相对固定轴线发生偏移。轴线的动态偏移不仅给腕关节转动轴线的定位及测量工作带来干扰和困难,并且在穿戴外骨骼式机器人进行康复训练时,可能产生额外的交互力,影响舒适性和安全性。因此,腕关节转动轴线动态偏移量的准确测量一方面可以为康复训练装置、假肢、矫形器等提供设计的理论依据,另一方面也可作为腕关节功能性评估的评价指标,具有较大的现实应用价值。
3.目前腕关节转动轴线动态偏移量的测量方法主要有侵入式和非侵入式两种方法。侵入式通常是将标记点直接打入关节骨骼,通过x光等成像设备,实现对转动轴线运动变化的观测。该方法对人体伤害较大,故一般较少采纳。非侵入式测量方法,主要借助于运动捕捉系统、视觉传感等特定设备,配合皮肤表面放置标记点进行测量。该方法一定程度上减少了对人体的伤害,但使用的设备成本往往较高,操作复杂,影响了推广应用。
4.本发明通过构建腕关节的运动学模型,结合惯性传感器和拉线位移传感器,即可快速配置轴线动态偏移量的测量环境,成本较低,且利用闭式运动链中位姿变换方法,可实时精确求解轴线动态偏差量。
技术实现要素:
5.为解决现有技术存在的腕关节的转动轴线动态偏移量难以测量,以及测量精度低的问题,本发明提供一种基于腕关节运动学模型的转动轴线动态偏移量测量方法。
6.为解决上述技术问题,本发明所采用的技术方案如下,一种基于腕关节运动学模型的转动轴线动态偏移量测量方法,该腕关节运动学模型包括激光指示器、底板和设置在底板上的前臂托架,第三个指骨的末端安装有第一惯性传感器,所述底板上设置有第二惯性传感器和拉线位移传感器,所述第二惯性传感器和拉线位移传感器均位于前臂托架的前方,所述拉线位移传感器与前臂托架在竖直面内对齐,所述第二惯性传感器位于拉线位移传感器的侧方,所述激光指示器用于指示腕关节的位置;
7.该测量方法包括如下步骤:
8.步骤一,测量前准备:首先将人体的前臂放置于所述前臂托架上,再通过激光指示器引导前臂,直至激光指示器的激光束与腕关节的转动轴线对齐,此时前臂沿前臂托架的
轴向放置,再用绑带将前臂固定在前臂托架上;
9.步骤二,腕关节运动学模型的建立:将前臂和手部视为刚体,构建成一个多连杆机构,并分别在腕骨与桡骨接触面中心、头状骨中心、掌屈背伸或桡偏尺偏自由度轴线中心、第三个指骨末端中心分别建立坐标系,构建轴线偏差求解的运动学模型;
10.步骤三,腕关节的转动轴线偏移量求解:构建基于多连杆机构的闭式运动链,通过位姿变换定量求解腕关节的转动轴线偏移量。
11.作为优选,所述步骤二中,建立坐标系:其中基坐标系{o0,x0,y0,z0}为固接于腕骨与桡骨接触面中心位置;第一坐标系{o1,x1,y1,z1}的原点与基座标系的原点重合;第二坐标系{o2,x2,y2,z2}的原点位于头状骨中心;第三坐标系{o3,x3,y3,z3}与第二坐标系的原点重合,第三坐标系表示腕关节掌屈背伸或桡偏尺偏自由度运动的转动轴线变化;第四坐标系{o4,x4,y4,z4}固接于第三个指骨末端位置;所述步骤三中,使用改进型d-h位姿变换方法建立相邻两坐标系之间的位姿变换关系。
12.进一步地,所述步骤三中,d-h位姿变换的参数包括:连杆序号i,绕着x
i-1
轴从z
i-1
轴旋转到zi轴的角度α
i-1
;沿着x
i-1
轴从z
i-1
轴移动到zi轴的距离a
i-1
;沿着zi轴从x
i-1
轴移动到xi轴的距离di;绕着zi轴从x
i-1
轴旋转到xi轴的角度θi;θ3=θ
m-90
°
,其中θm为腕关节的掌屈背伸自由度转动角度,并规定掌屈方向为正,θm∈[-90
°
,90
°
];l为头状骨中心到第三个指骨末端的距离;e为相对于腕骨与桡骨接触面的腕关节的转动轴线偏移量;
[0013]
所述第四坐标系相对于基坐标系的位姿变换运动学方程可以表示为:
[0014][0015]
其中,c3=cosθ3,s3=sinθ3;
[0016]
所述第一惯性传感器与第四坐标系重合,所述拉线位移传感器的拉线与第三个指骨的末端连接,分别解算第一惯性传感器和第二惯性传感器姿态的四元数,再将所得到的四元数转换成姿态角,通过姿态角计算所述第一惯性传感器相对于第二惯性传感器的转动角度θm,即腕关节的掌屈背伸自由度转动角度θm;
[0017]
同时,在拉线位移传感器的出线口处建立第五坐标系{o5,x5,y5,z5},根据位姿变换有:
[0018]
其中,
[0019]
为第五坐标系相对于基坐标系的姿态描述,为3x3矩阵形式;为第五坐标系原点在基坐标系的位置描述,为3x3矩阵形式,其坐标(p
1x
,p
1y
,p
1z
)中的参数m为第五坐标系的原点与基坐标系的原点在x轴方向的距离,参数n为第五坐标系的原点与基坐标系的原点在z轴方向的距离。由此,矩阵可表示为4x4矩阵形式,且各元素均为已知常数;
[0020]
同理,有:
[0021]
通过第二惯性传感器(p0,p1,p2,p3)可以确定所述第四坐标系相对于第五坐标系的姿态旋转变换矩阵为:
[0022][0023]
为所述第四坐标系原点在第五坐标系的位置描述,其可通过拉线位移传感器获得的长度r;第五坐标系的原点与第四坐标系的原点连线与x轴之间的夹角为α,由此第四坐标系的原点在第五坐标系的坐标可表示为(p
2x
,p
2y
,p
2z
),其中p
2x
=-r*cosα,p
2y
=0,p
2z
=r*sinα;
[0024]
因此,有:
[0025][0026]
结合式(3),有:
[0027][0028]
由式(7)与式(1)相等,可得:
[0029][0030]
e=m-l cosθ
m-r cosα(9)
[0031]
最后,根据式(8)和式(9)可求解腕关节的转动轴线偏移量e。
[0032]
进一步地,将腕关节的桡偏尺偏自由度的轴线与掌屈背伸自由度的轴线简化为正交位置关系;
[0033]
根据d-h位姿变换方法,在桡偏尺偏运动中,所述第四坐标系相对于基坐标系的位姿变换运动学方程与式(1)不同,表示为:
[0034][0035]
其中,c2=cosθ2,s2=sinθ2,θ2=-90
°‑
θn,其中θn为桡偏尺偏转动角度,可由所述第一惯性传感器相对于第二惯性传感器的转动角度获得,以尺偏方向为正,θn∈[-90
°
,90
°
];同时,腕关节在进行桡偏尺偏自由度运动时,所述第四坐标系的原点在第五坐标系的位置描述表现为空间运动,因此,其坐标(p
2x
',p
2y
',p
2z
'),其中,'),其中,p
2z
'=r sinα;α为第五坐标系的原点与第四坐标系的原点连线与其在水平面投影之间的夹角,并在掌屈背伸自由度转动角度为零的情况下,有之间的夹角,并在掌屈背伸自由度转动角度为零的情况下,有为第五坐标系的原点与第四坐标系的原点连线在水平面的投影与x轴之间的夹角
[0036]
因此,有:
[0037][0038][0039]
由式(12)与式(10)相等,可得:
[0040]
sinα=n/r(13)
[0041][0042][0043]
θ2=-90
°‑
θn(16)
[0044]
根据式(13)~(16)可得:
[0045]
α=arc sin(n/r)(17)
[0046][0047][0048]
最后,根据式(17)~(19)求解腕关节的转动轴线偏移量e。
[0049]
作为优选,所述激光指示器固定设置在前臂托架上,所述激光指示器的激光束朝向水平方向且垂直于前臂托架,当前臂沿前臂托架的轴向贴合放置在前臂托架内,所述腕关节的转动轴线与激光指示器的激光束轴线对齐时,所述前臂放置到位。
[0050]
有益效果:本发明的基于腕关节运动学模型的转动轴线动态偏移量测量方法,建立基于腕关节生理结构的多连杆运动学模型,并基于惯性传感器和拉线位移传感器,搭建闭式运动链进行位姿变换,从而求解获得腕关节转动轴线偏移量;在使用本发明的测量方法时,将前臂与前臂托架紧密绑定,并将第一惯性传感器安装于第三个指骨的末端表面,排除表面皮肤变形、前臂与前臂托架之间的相对滑动等因素对腕关节转动轴线的位置带来的干扰,提高了腕关节转动轴线偏移量及转动半径求解的准确性;因此,使用本发明的测量方法求解腕关节转动轴线偏移量,可以比较充分地表征因生理结构原因导致的腕关节转动轴线动态变化情况,相比于现有的方法,本发明的测量方法对于腕关节转动轴线偏移量的测量具有明显的个体化特征,腕关节转动轴线偏差的数值与人体生理结构(如腕骨到指骨的距离、关节活动范围等)相关,且不易受表面皮肤变形、前臂与前臂托架之间的相对滑动等因素的影响,测量简单方便,测量精度高,成本较低,具有较好的推广应用价值。
附图说明
[0051]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域的普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
[0052]
图1是手腕的结构示意图;
[0053]
图2是本发明测量方法的建立的各个坐标系的示意图;
[0054]
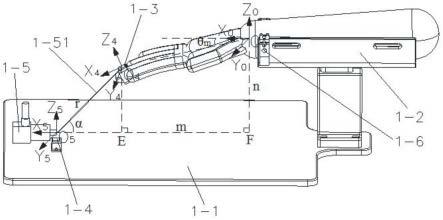
图3是本发明测量方法的掌屈/背伸的腕关节转动轴线偏移量测量时的立体结构示意图;
[0055]
图4是本发明测量方法的桡骨/尺骨的腕关节转动轴线偏移量测量时的立体结构示意图;
[0056]
图中:1-1、底板,1-2、前臂托架,1-3、第一惯性传感器,1-4、第二惯性传感器,1-5、拉线位移传感器,1-51、拉线,1-6、激光指示器;100、腕骨,101、头状骨,200、桡骨,300、尺骨,400、掌骨,500、指骨。
具体实施方式
[0057]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0058]
如图2~4所示,一种基于腕关节运动学模型的转动轴线动态偏移量测量方法,该腕关节运动学模型包括激光指示器1-6、底板1-1和设置在底板1-1上的前臂托架1-2,第三个指骨500的末端安装有第一惯性传感器1-3,所述底板1-1上设置有第二惯性传感器1-4和拉线位移传感器1-5,所述第二惯性传感器1-4和拉线位移传感器1-5均位于前臂托架1-2的前方,所述拉线位移传感器1-5与前臂托架1-2在竖直面内对齐,所述第二惯性传感器1-4位于拉线位移传感器1-5的侧方,所述激光指示器1-6用于指示腕关节的位置;所述激光指示
器1-6固定设置在前臂托架1-2上,所述激光指示器1-6的激光束朝向水平方向且垂直于前臂托架1-2,当前臂沿前臂托架1-2的轴向贴合放置在前臂托架1-2内,所述腕关节的转动轴线与激光指示器1-6的激光束轴线对齐时,所述前臂放置到位;
[0059]
该测量方法包括如下步骤:
[0060]
步骤一,测量前准备:首先将人体的前臂放置于所述前臂托架1-2上,如图3和图4所示,再通过激光指示器1-6发射的激光束引导前臂,直至激光指示器1-6的激光束与腕关节的转动轴线对齐,此时前臂沿前臂托架1-2的轴向贴合放置在前臂托架1-2内,再用绑带(图中未示意出)将前臂固定在前臂托架1-2上,确保前臂与前臂托架1-2之间无相对运动;
[0061]
步骤二,腕关节运动学模型的建立:将前臂和手部视为刚体,构建成一个多连杆机构,并分别在腕骨100与桡骨200接触面中心、头状骨101中心、掌屈/背伸或桡偏/尺偏自由度轴线中心、第三个指骨500末端中心分别建立坐标系,构建轴线偏差求解的运动学模型;在腕关节运动学模型中,本实施例的所述建立坐标系:如图3所示,其中基坐标系{o0,x0,y0,z0}为固接于腕骨100与桡骨200接触面中心位置;第一坐标系{o1,x1,y1,z1}的原点与基座标系的原点重合;第二坐标系{o2,x2,y2,z2}的原点位于头状骨101中心;第三坐标系{o3,x3,y3,z3}与第二坐标系的原点重合,第三坐标系表示腕关节掌屈/背伸或桡偏/尺偏自由度运动的转动轴线变化;第四坐标系{o4,x4,y4,z4}固接于第三个指骨500末端位置;
[0062]
步骤三,腕关节的转动轴线偏移量求解:构建基于多连杆机构的闭式运动链,通过位姿变换定量求解腕关节的转动轴线偏移量;使用改进型d-h位姿变换方法建立相邻两坐标系之间的位姿变换关系。
[0063]
腕关节具备两个自由度,即腕关节掌屈/背伸自由度和桡偏/尺偏,两自由度的转动轴线位置随着腕关节的转动而不断变化,因两自由度轴线之间也存在一定偏差,为求解方便,将两自由度轴线偏移量分别求解:
[0064]ⅰ.腕关节掌屈/背伸的转动轴线偏移量e:
[0065]
所述步骤三中,d-h位姿变换的参数包括:连杆序号i,绕着x
i-1
轴从z
i-1
轴旋转到zi轴的角度α
i-1
;沿着x
i-1
轴从z
i-1
轴移动到zi轴的距离a
i-1
;沿着zi轴从x
i-1
轴移动到xi轴的距离di;绕着zi轴从x
i-1
轴旋转到xi轴的角度θi;下表1中列出了相邻两坐标系之间的d-h位姿变换的参数;
[0066]
iα
i-1ai-1di
θi100090
°
2900e-90
°
3-90
°
00θ3490
°
l00
[0067]
表1 d-h参数
[0068]
表1中,l为头状骨101中心到第三个指骨500末端的距离,该距离数值与个体生理尺寸有关,参考相关文献(babaiasl m,mahdioun sh,jaryani p,et al.a review of technological and clinical aspects of robot-aided rehabilitation of upper-extremity after stroke[j].disability&rehabilitation assistivetechnology,2016:263.),有l=0.108*h,h为人体身高,其为常数;e为相对于腕骨100与桡骨200接触面的腕关节的转动轴线偏移量;θ3=θ
m-90
°
,其中θm为腕关节的掌屈/背伸自由度转动角度,并规定掌
屈方向为正,θm∈[-90
°
,90
°
];
[0069]
因此,所述第四坐标系相对于基坐标系的位姿变换运动学方程可以表示为:
[0070][0071]
其中,c3=cosθ3,s3=sinθ3;
[0072]
如图3所示,所述第一惯性传感器1-3与第四坐标系重合,所述拉线位移传感器1-5的拉线1-51与第三个指骨500的末端(第一惯性传感器1-3)连接,分别解算第一惯性传感器1-3和第二惯性传感器1-4姿态的四元数,再将所得到的四元数转换成姿态角,通过姿态角计算所述第一惯性传感器1-3相对于第二惯性传感器1-4的转动角度θm,即腕关节的掌屈/背伸自由度转动角度θm;
[0073]
同时,在拉线位移传感器1-5的出线口处建立第五坐标系{o5,x5,y5,z5},因此,在图3中,根据位姿变换有:
[0074]
其中,
[0075]
为第五坐标系相对于基坐标系的姿态描述,为3x3矩阵形式;为第五坐标系原点在基坐标系的位置描述,为3x3矩阵形式,其坐标(p
1x
,p
1y
,p
1z
)中的参数m为第五坐标系的原点与基坐标系的原点在x轴方向的距离,参数n为第五坐标系的原点与基坐标系的原点在z轴方向的距离,m、n均可通过搭建测试实验手动测量获得。由此,矩阵可表示为4x4矩阵形式,且各元素均为已知常数;
[0076]
同理,有:
[0077]
参考相关文献《李志伟、李克昭、赵磊杰等人.基于单位四元数的任意旋转角度的三维坐标转换[j].大地测量与地球动力学,2017,37(01):81-85.》,通过第二惯性传感器1-4(p0,p1,p2,p3)可以确定所述第四坐标系相对于第五坐标系的姿态旋转变换矩阵为:
[0078][0079]
为所述第四坐标系(第一惯性传感器1-3所在坐标系)原点在第五坐标系的位置描述,其可通过拉线位移传感器1-5获得的长度r;第五坐标系的原点与第四坐标系的原点连线(即拉线位移传感器1-5伸出的拉线1-51)与x轴之间的夹角为α,由此第四坐标
系的原点在第五坐标系的坐标可表示为(p
2x
,p
2y
,p
2z
),其中p
2x
=-r*cosα,p
2y
=0,p
2z
=r*sinα;
[0080]
因此,有:
[0081][0082]
结合式(3),有:
[0083][0084]
由式(7)与式(1)相等,可得:
[0085][0086]
e=m-lcosθ
m-rcosα(9)
[0087]
最后,式(8)和式(9)中的参数m和n可通过搭建测试实验手动测量获得,l可通过人体高度求解获得,r可通过拉线位移传感器1-5测量获得,腕关节掌屈/背伸自由度的转动角度θm可通过求解第一惯性传感器1-3和第二惯性传感器1-4相对转动角度获得,根据式(8)和式(9)可求解腕关节的转动轴线偏移量e。
[0088]
腕关节桡偏/尺偏的轴线偏移量求解方法可同理求得,仅对与腕关节掌屈/背伸的转动轴线偏移量的差异点作简要分析;
[0089]ⅱ.腕关节桡偏/尺偏的转动轴线偏移量e:
[0090]
将腕关节的桡偏/尺偏自由度的轴线与掌屈/背伸自由度的轴线简化为正交位置关系,如图4所示,为简化图4,图4中的第一惯性传感器1-3、第二惯性传感器1-4,以及基座标系、第四坐标系和第五坐标系,未作标注,同图3保持一致;根据d-h位姿变换方法,在桡偏/尺偏运动中,所述第四坐标系相对于基坐标系的位姿变换运动学方程与式(1)不同,表示为:
[0091][0092]
其中,c2=cosθ2,s2=sinθ2,θ2=-90
°‑
θn,其中θn为桡偏/尺偏转动角度,可由所述第一惯性传感器1-3相对于第二惯性传感器1-4的转动角度获得,以尺偏方向为正,θn∈[-90
°
,90
°
];同时,腕关节在进行桡偏/尺偏自由度运动时,所述第四坐标系(第一惯性传感器1-3所在坐标系)的原点在第五坐标系的位置描述表现为空间运动,因此,其坐标(p
2x
',
p
2y
',p
2z
'),其中,p
2z
'=r sinα;α为第五坐标系的原点与第四坐标系的原点连线(即拉线1-51传感器伸出的拉线1-51)与其在水平面投影之间的夹角,并在掌屈/背伸自由度转动角度为零的情况下,有之间的夹角,并在掌屈/背伸自由度转动角度为零的情况下,有为第五坐标系的原点与第四坐标系的原点连线(即拉线1-51传感器伸出的拉线1-51)在水平面的投影与x轴之间的夹角
[0093]
因此,参照所述第ⅰ部分的求解方法,有:
[0094][0095][0096]
由式(12)与式(10)相等,可得:
[0097]
sinα=n/r(13)
[0098][0099][0100]
θ2=-90
°‑
θn(16)
[0101]
根据式(13)~(16)可得:
[0102]
α=arc sin(n/r)(17)
[0103][0104][0105]
最后,式(17)~(19)的参数m和n可通过搭建测试实验手动测量获得,l可通过人体高度求解获得,r可通过拉线位移传感器1-5测量获得,腕关节桡偏/尺偏自由度的转动角度θn可通过求解第一惯性传感器1-3和第二惯性传感器1-4相对转动角度获得,因此,根据式(17)~(19)求解腕关节的转动轴线偏移量e。
[0106]
以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1