一种踝关节术后韧带恢复装置
1.本发明涉及医疗器械领域,尤其涉及一种踝关节术后韧带恢复装置。
背景技术:
2.踝关节挛缩、受外伤或手术后需要进行固定以限制其活动从而利于软组织的快速修复。通常,软组织的修复过程中会发生各种挛缩以及粘连,因而去除踝关节固定装置后患者会产生不同程度的踝关节功能障碍。踝关节功能障碍会极大地影响患者的日常生活,因此对患者的踝关节进行康复训练尤为重要。另外在踝关节训练中还要通过平衡肌肉力量以预防关节扭伤。
3.本实验团队长期针对踝关节康复训练的相关技术进行大量相关记录资料的浏览和研究,同时依托相关资源,并进行大量相关实验,经过大量检索发现存在的现有技术如现有技术公开的kr101557247b1、kr101408966b1、us06926739b1、和cn103027823b,如现有技术公开的一种踝关节康复训练装置,其包括支撑平台、第一回转平台、第一驱动器、第二回转平台及第二驱动器。支撑平台上相对地设置有两个支撑柱。第一回转平台为框架结构,其相对的两外侧各设置一个第一支撑架,所述两个第一支撑架和所述两个支撑柱对应活动配合,使第一回转平台可在水平面回转。第一驱动器和第一回转平台相连接,其驱动第一回转平台绕第一水平轴旋转。第二回转平台上设置有脚托盘,其绕垂直于第一水平轴的第二水平轴可旋转地设置于第一回转平台内。第二驱动器和第二回转平台相连接,其驱动第二回转平台绕第二水平轴旋转。所述踝关节康复训练装置整体结构简单,适合踝关节损伤患者进行康复治疗与人体平衡能力的测定。
4.为了解决本领域普遍存在不能有效对不同患者的脚部进行稳定固定、对患者脚踝附近的韧带的康复训练不全面等等问题,作出了本发明。
技术实现要素:
5.本发明的目的在于,针对目前本邻域所存在的不足,提出了一种踝关节术后韧带恢复装置。
6.为了克服现有技术的不足,本发明采用如下技术方案:
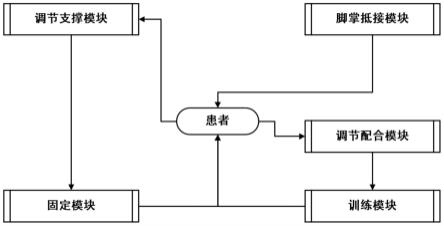
7.一种踝关节术后韧带恢复装置,所述踝关节术后韧带恢复装置包括对患者身体进行支撑固定的固定模块、活动设置于所述固定模块上且对患者的小腿进行适应性支撑的调节支撑模块、对患者的脚掌进行适配固定的脚掌抵接模块、对所述脚掌抵接模块进行阻力牵引以供患者进行踝关节术后韧带恢复训练的训练模块、和驱动所述训练模块相对所述固定模块进行移动以使得所述训练模块自动与患者的脚掌进行配合固定的调节配合模块,
8.其中,所述固定模块包括对患者的至少头部和背部进行支撑的上支撑板、其中一端与所述上支撑板转动配合且用于对患者臀部和部分大腿进行支撑固定的中支撑板、其中一端与所述中支撑板的另一端转动配合且用于对患者的至少部分大腿和小腿进行支撑固定的下支撑板、底部固定于地面且顶部与所述上支撑板转动固定的至少两个上升降驱动设
备、底部固定于地面且顶部与所述中支撑板转动固定的至少两个中升降驱动设备、和底部固定于地面且顶部与所述下支撑板转动固定的至少两个下升降驱动设备,其中,以所述下支撑板的远离所述中支撑板的一端为所述下支撑板的训练端,以所述下支撑板的底板壁为驱动底壁。
9.进一步的,所述脚掌抵接模块包括至少两个分别部分活动配合于所述下支撑板的下板壁且部分朝所述下支撑板外伸出以用于对患者的小腿进行支撑固定的单元板、部分嵌设于所述单元板的伸出端的板壁上且相应转动轴贯穿至所述单元板外的微型旋转电机、通过一侧壁与所述微型旋转电机的转动轴固定连接进而由所述微型旋转电机驱动至相对所述单元板进行转动作业的转动板、一板侧沿与所述转动板的相对远离所述单元板的板壁通过相应连接件转动配合且用于对患者的脚掌进行抵接配合的脚掌固定板、配合连接至所述脚掌固定板和单元板上的用于限制所述脚掌固定板相对所述单元板进行预设角度转动的扭转弹簧、和配合设置于所述脚掌固定板上且对患者的抵接于所述脚掌固定板的脚掌进行环绕固定的固定机构,其中,所述单元板的伸出至所述下支撑板的一端为所述单元板的伸出端。
10.进一步的,所述调节支撑模块包括分别驱动相应单元板相对所述下支撑板进行移动的移动驱动机构、均匀敷设于所述单元板的上板壁的红外传感器、和接收所述红外传感器的检测值且对应生成所述移动驱动机构对相应单元板的移动驱动指令的指令生成单元。
11.进一步的,所述调节配合模块包括垂直固定于地面且与所述下支撑板以预设间隔距离邻接设置的固定支架、竖直固定于所述固定支架上的线性滑台、由所述线性滑台驱动至相对所述固定支架进行升降线性滑动的滑块、和加强所述滑块与所述线性滑台的固定稳定性的固定稳定器,其中所述固定支架为柜体结构。
12.进一步的,所述训练模块包括相对地面水平连接于所述滑块的其中一侧壁上的驱动壳体、设置于所述驱动壳体内的驱动空腔、设置于所述驱动壳体上的贯出口、固定于所述驱动空腔内的卷扬装置、和一端由所述卷扬装置绕卷固定且另一端从所述贯出口贯出至所述驱动壳体外界并进一步通过相应锁合件固定于所述脚掌固定板的配合壁上的弹力绳。
13.本发明所取得的有益效果是:
14.1.本发明通过所述调节支撑模块以有效对不同患者小腿在相应单元板上的接触区域进行识别,进一步通过自动调节所述单元板的伸缩移动作业以使得所述脚掌固定板自动抵接配合至患者的脚掌,进而保证对不同患者进行康复训练过程中,脚掌抵接模块与不同患者脚部的自动抵接。
15.2.本发明通过所述固定机构有效对将所述脚掌固定板与患者脚部进行牢固固定,以保证患者在康复训练中脚掌牵引转动的稳定性,进而保证后续康复训练的训练效果。
16.3.本发明过所述微型旋转电机驱动所述脚掌固定板和转动板相对所述单元板进行同步转动进而对患者脚踝附近的韧带进行全面阻力拉伸康复训练,同时通过所述调节配合模块以保证所述卷扬设备精准控制所述牵引绳对脚掌固定板的牵引阻力,进而有效提高患者脚踝术后韧带的康复训练效率。
附图说明
17.从以下结合附图的描述可以进一步理解本发明。图中的部件不一定按比例绘制,
而是将重点放在示出实施例的原理上。在不同的视图中,相同的附图标记指定对应的部分。
18.图1为本发明的踝关节术后韧带恢复装置的模块化示意图。
19.图2为本发明的调节支撑模块的模块化示意图。
20.图3为本发明的脚掌抵接模块的结构示意图。
21.图4为本发明的固定机构的结构示意图。
22.图5为本发明的踝关节术后韧带恢复装置与现有技术的实验对比示意图。
23.附图标号说明:1-下支撑板;2-线性驱动设备;3-单元板;4-开口环框;5-微型旋转电机;6-转动板;7-脚掌固定板;8-转动片;9-弧形板;10-减速电机。
具体实施方式
24.为了使得本发明的目的、技术方案及优点更加清楚明白,以下结合其实施例,对本发明进行进一步详细说明;要指出的是,此处所描述的具体实施例仅用于解释本发明,并不用于限制本案。对于本领域技术人员而言,在查阅以下详细描述之后,本实施例的其它系统、方法和/或特征将变得显而易见。并且关于附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
25.实施例一:
26.结合附图1、附图2、附图3、附图4和附图5,本实施例构造了一种踝关节术后韧带恢复装置;
27.一种踝关节术后韧带恢复装置,所述踝关节术后韧带恢复装置包括对患者身体进行支撑固定的固定模块、活动设置于所述固定模块上且对患者的小腿进行适应性支撑的调节支撑模块、对患者的脚掌进行适配固定的脚掌抵接模块、对所述脚掌抵接模块进行阻力牵引以供患者进行踝关节术后韧带恢复训练的训练模块、和驱动所述训练模块相对所述固定模块进行移动以使得所述训练模块自动与患者的脚掌进行配合固定的调节配合模块,其中,所述固定模块包括对患者的至少头部和背部进行支撑的上支撑板、其中一端与所述上支撑板转动配合且用于对患者臀部和部分大腿进行支撑固定的中支撑板、其中一端与所述中支撑板的另一端转动配合且用于对患者的至少部分大腿和小腿进行支撑固定的下支撑板、底部固定于地面且顶部与所述上支撑板转动固定的至少两个上升降驱动设备、底部固定于地面且顶部与所述中支撑板转动固定的至少两个中升降驱动设备、和底部固定于地面且顶部与所述下支撑板转动固定的至少两个下升降驱动设备,其中,以所述下支撑板的远离所述中支撑板的一端为所述下支撑板的训练端,以所述下支撑板的底板壁为驱动底壁;
28.进而通过相应升降驱动设备对相应支撑板的升降调节以使得所述固定机构呈现床体和/或椅体机构以对患者进行踝关节术后韧带恢复训练过程中的身体进行有效支撑作业,以保证患者康复训练中的身体的稳定性,进而有效保证训练效果;
29.所述脚掌抵接模块包括至少两个分别部分活动配合于所述下支撑板的下板壁且部分朝所述下支撑板外伸出以用于对患者的小腿进行支撑固定的单元板、部分嵌设于所述单元板的伸出端的板壁上且相应转动轴贯穿至所述单元板外的微型旋转电机、通过一侧壁与所述微型旋转电机的转动轴固定连接进而由所述微型旋转电机驱动至相对所述单元板进行转动作业的转动板、一板侧沿与所述转动板的相对远离所述单元板的板壁通过相应连
接件转动配合且用于对患者的脚掌进行抵接配合的脚掌固定板、配合连接至所述脚掌固定板和单元板上的用于限制所述脚掌固定板相对所述单元板进行预设角度转动的扭转弹簧、和配合设置于所述脚掌固定板上且对患者的抵接于所述脚掌固定板的脚掌进行环绕固定的固定机构,其中,所述单元板的伸出至所述下支撑板的一端为所述单元板的伸出端;
30.所述调节支撑模块包括分别驱动相应单元板相对所述下支撑板进行移动的移动驱动机构、均匀敷设于所述单元板的上板壁的红外传感器、和接收所述红外传感器的检测值且对应生成所述移动驱动机构对相应单元板的移动驱动指令的指令生成单元,其中,所述移动驱动机构包括顶部固定于所述驱动底壁上且中部套设于所述单元板的部分外板壁的开口环框、和固定于所述驱动底壁上且动力输出轴与所述单元板固定连接以驱动所述单元板贯穿移动于所述开口环框的线性驱动设备;
31.所述红外传感器用于检测所述患者腿部在所述单元板的接触区域,所述红外传感器基于在患者小腿支撑于所述单元板时,小腿在单元板上的相应接触区域的红外传感器进行遮挡,进而对应红外传感器生成相应遮挡信号,且单元板的伸出端附近的未被所述小腿接触的未接触区域上的红外传感器不生成遮挡信号;
32.所述红外传感器沿所述单元板的上板壁的长度方向以预设间隔依次设置,且所述单元板的初始作业状态为由所述移动驱动机构以预设的上限伸出长度驱出至所述下支撑板外,且在所述患者的腿部固定于相应的单元板上时,所述指令生成单元接收各红外传感器的检测信号,并且获取相应接近所述脚掌固定板的附近的至少一个互相邻接且不生成遮挡信号的红外传感器所在的单元板区域为未遮挡区域,且获取所述未遮挡区域的长度作为目标长度,进一步发送指令至相应移动驱动机构以使得所述移动驱动机构驱动相应单元板朝所述下支撑板内回收目标长度,进而实现自动调节所述单元板进行移动至将所述脚掌固定板适配抵接至患者的脚掌上;
33.本发明通过所述调节支撑模块以有效对不同患者小腿在相应单元板上的接触区域进行识别,进一步通过自动调节所述单元板的伸缩移动作业以使得所述脚掌固定板自动抵接配合至患者的脚掌,进而保证对不同患者进行康复训练过程中,脚掌抵接模块与不同患者脚部的自动抵接。
34.实施例二:
35.结合附图1、附图2、附图3、附图4和附图5,除了包含以上实施例的内容以外,还在于:
36.在所述脚掌固定板相对所述转动板进行转动作业时,以所述脚掌固定板为转动作业过程中的旋转面,且以转动板的与脚掌固定板转动配合的板侧沿为转动作业过程中的旋转轴,进一步,所述脚掌固定板的供患者脚掌进行踩压抵接的一侧板壁为脚掌固定板的踩压壁,且所述脚掌固定板的与所述踩压壁平行设置的另一侧板壁为脚掌固定板的配合壁;
37.其中,所述固定机构包括两个分别至少部分对称嵌设于所述配合壁的顶部且对应动力输出轴贯出至所述配合壁外的减速电机、一端与所述减速电机的动力输出轴连接固定且另一端朝所述配合壁外延伸设置的转动片、一端与所述转动片的另一端连接固定且另一端朝所述踩压壁弯曲延伸设置的弧形结构的弧形板、依次敷设于所述弧形板的内弧壁的单元气囊、嵌设于所述弧形板内且分别与相应单元气囊连通设置的通气管、与所述通气管连通设置进而控制相应单元气囊的充气情况的微型充放气泵、和敷设于所述单元气囊的外囊
衣以监控所述单元气囊对患者脚掌的抵接压力的柔性压力传感器;
38.在所述患者未踩压于所述脚掌固定板上时,所述弧形板位于所述脚掌固定板的顶端进而不影响所述驱动机构对单元板的位置调节作业,且在所述患者脚掌抵接于所述脚掌固定板上时,所述减速电机驱动相应弧形板进行转动作业进而使得相应弧形板分贝环绕配合于患者脚掌的两侧区域,且相应弧形板的环绕配合以及配合于各弧形板的单元气囊进一步充气后对患者脚部进行抵接,以实现的脚掌进行抵接固定,进而将患者脚掌固定于所述脚掌固定板上;
39.其中,所述柔性压力传感器与控制相应单元气囊的充气情况的微型充放气泵电气连接,进而在所述减速电机驱动所述弧形板环绕配合至患者的脚掌两侧时,相应微型充放气泵对相应单元气囊进行充气作业直至相应单元气囊上的柔性压力传感的检测值到达预设的上限固定压力值,进而实现自动将不同患者的脚掌固定于所述脚掌固定板上,以保证患者的脚踝韧带恢复训练的安全性和训练效率;
40.本发明通过所述固定机构有效对将所述脚掌固定板与患者脚部进行牢固固定,以保证患者在康复训练中脚掌牵引转动的稳定性,进而保证后续康复训练的训练效果。
41.实施例三:结合附图1、附图2、附图3、附图4和附图5,除了包含以上实施例的内容以外,还在于:
42.所述调节配合模块包括垂直固定于地面且与所述下支撑板以预设间隔距离邻接设置的固定支架、竖直固定于所述固定支架上的线性滑台、由所述线性滑台驱动至相对所述固定支架进行升降线性滑动的滑块、和加强所述滑块与所述线性滑台的固定稳定性的固定稳定器,其中所述固定支架为柜体结构;
43.所述训练模块包括相对地面水平连接于所述滑块的其中一侧壁上的驱动壳体、设置于所述驱动壳体内的驱动空腔、设置于所述驱动壳体上的贯出口、固定于所述驱动空腔内的卷扬装置、一端由所述卷扬装置绕卷固定且另一端从所述贯出口贯出至所述驱动壳体外界并进一步通过相应锁合件固定于所述脚掌固定板的配合壁上的弹力绳;
44.通过所述卷扬装置对相应弹力绳的释放长度的控制进而同步对所述弹力绳对所述脚掌固定板的牵引阻力进行控制,在患者进行踝关节术后韧带恢复训练过程中,患者的脚掌通过所述固定机构固定于相应脚掌固定板上,且患者通过脚掌在所述弹力绳的牵引阻力下朝小腿方向进行转动,进而有效实现对踝关节附近韧带进行康复训练,同时,通过所述微型旋转电机的转动驱动以使得所述转动板和脚掌固定板相对所述单元板进行同步转动作业,以实现对所述患者的脚掌的固定角度进行调节,进一步实现对患者脚踝的不同角度的韧带进行拉伸训练;
45.所述固定稳定器包括分别竖直设置于所述固定支架上的线性凹槽、分别移动配合于所述线性凹槽内且限位活动于所述线性凹槽的凹槽腔内的移动块、和一端固定于所述移动块且另一端固定于所述滑块上的弯曲结构的连接杆,进而在所述线性滑台停止对所述滑块进行移动驱动作业时,且患者在训练过程对所述弹力绳进行拉伸牵引时,所述连接杆以及移动块有效加强所述滑块在所述弹力绳牵引过程中的稳定性,进而保证患者训练过程中的安全性;
46.其中,所述线性凹槽位于所述线性滑台的两侧附近的固定支架区域上,所述线性滑台竖直固定于所述固定支架的接近所述床体的一侧,且所述下升降驱动设备与所述线性
滑台电气连接,所述线性滑台用于驱动所述驱动壳体至所述上支撑板的预设距离上方,进而保证在所述固定模块进行升降调节时,保证所述牵引绳对所述脚掌固定板的牵引阻力的固定性,使得仅通过所述卷扬装置对牵引绳的牵引阻力进行控制,进而提高相应牵引绳对所述脚掌固定板的牵引阻力的精准调节;
47.本发明过所述微型旋转电机驱动所述脚掌固定板和转动板相对所述单元板进行同步转动进而对患者脚踝附近的韧带进行全面阻力拉伸康复训练,同时通过所述调节配合模块以保证所述卷扬设备精准控制所述牵引绳对脚掌固定板的牵引阻力,进而有效提高患者脚踝术后韧带的康复训练效率。
48.虽然上面已经参考各种实施例描述了本发明,但是应当理解,在不脱离本发明的范围的情况下,可以进行许多改变和修改。也就是说上面讨论的方法,系统和设备是示例。各种配置可以适当地省略,替换或添加各种过程或组件。例如,在替代配置中,可以以与所描述的顺序不同的顺序执行方法,和/或可以添加,省略和/或组合各种部件。而且,关于某些配置描述的特征可以以各种其他配置组合,如可以以类似的方式组合配置的不同方面和元素。此外,随着技术发展其中的元素可以更新,即许多元素是示例,并不限制本公开或权利要求的范围。并且应当理解,在阅读了本发明的记载的内容之后,技术人员可以对本发明作各种改动或修改,这些等效变化和修饰同样落入本发明权利要求所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1