一种微创手术机器人的柔性终端器械
1.本发明涉及微创手术技术领域,具体涉及一种微创手术机器人的柔性终端器械
背景技术:
2.现代科技不断发展,同时医疗技术也在不断进步。随着临床经验的丰富和科技水平的提高,国内外近年来提出了单孔腹腔镜外科手术的概念,而与多孔腹腔镜手术相比,单孔微创手术具有创伤进一步缩小、术后不留疤痕、病人康复快并且感染率低等独特优势,具有柔性的多自由度微创手术器械也便成为了研究的热点。
3.随着微创手术得到越来越广泛的应用,连续体机器人在人体腔道介入微创手术中,因其结构紧凑小巧、柔顺度高等特性,相比于传统的刚性手术器械具备较大的优越性,能够适应复杂腔道并精准定位病灶位置。现有的柔性连续体终端手术器械则存在负载能力较低,柔性连续体器械刚度不佳,且连续体动作范围不足等问题,临床上对一种具有强负载能力,且具有大运动范围的柔性连续体终端手术器械有强烈的需求,因此亟需提供一种微创手术机器人的柔性终端器械。
技术实现要素:
4.本发明的目的是为了解决现有技术中柔性连续体终端手术器械负载能力较低,柔性连续体器械刚度不佳且连续体动作范围不足等问题,进而提供一种微创手术机器人的柔性终端器械。
5.本发明为解决上述问题采取的技术方案是:一种微创手术机器人的柔性终端器械,包括组织钳器械安装组件和组织钳连续体组件;所述组织钳连续体组件安装在组织钳器械安装组件的器械直管上,所述组织钳连续体组件包括钳头安装盘、多个导丝盘、连续体底盘和四根导丝,所述导丝在运动过程中与钳头安装盘、导丝盘和连续体底盘产生接触,实现组织钳连续体组件的旋转及弯曲动作进而执行手术操作。
6.进一步地,所述组织钳连续体组件还包括弹簧钢管、钢丝和和拉伸杆;所述钳头安装盘安装在弹簧钢管的前端,所述连续体底盘安装在弹簧钢管的后端,多个导丝盘由前至后依次套装在弹簧钢管上,且导丝盘位于钳头安装盘与连续体底盘之间,所述连续体底盘安装在器械直管上,四根导丝呈圆周均匀分布在钢丝的外部;
7.所述钢丝的一端和拉伸杆连接,钢丝的另一端依次穿过弹簧钢管、连续体底盘和器械直管,所述导丝的一端和钳头安装盘连接,导丝的另一端依次穿过导丝盘、连续体底盘和器械直管,所述钳头安装盘上安装有手术钳组件,所述手术钳组件的末端和拉伸杆连接。
8.进一步地,所述钢丝外部穿有第一钢丝弹簧和第二钢丝弹簧,所述第一钢丝弹簧安装在器械直管内部,所述第二钢丝弹簧安装在弹簧钢管内部,每个所述导丝外部均穿有导丝弹簧,所述导丝弹簧安装在器械直管内部。
9.进一步地,所述器械直管和连续体底盘连接的一端通过四轴激光切割加工有一段器械直管螺旋切口,所述器械直管由镍钛合金制成。
10.进一步地,所述弹簧钢管通过四轴激光切割整体加工有弹簧钢管螺旋切口,所述弹簧钢管由镍钛合金制成,所述弹簧钢管的两端加工有安装切口。
11.进一步地,所述导丝盘是空心柱体,且导丝盘内设有环形凸台,所述环形凸台上沿圆周方向均布设有四个导丝盘导丝孔。
12.进一步地,所述导丝盘的端面对称设有两个圆弧导丝盘斜面,两个导丝盘斜面之间通过两个导丝盘弧面连接,所述导丝盘一端的两个导丝盘弧面的中心连线与另一端的两个导丝盘弧面的中心连线垂直,相邻两个导丝盘之间相对的导丝盘弧面相互接触,两个导丝盘之间的导丝盘弧面接触后,其相对的两个导丝盘斜面组成一个梭形导丝盘间隙斜面。
13.进一步地,所述钳头安装盘的一端对称设有两个圆弧钳头安装盘斜面,两个钳头安装盘斜面之间通过两个钳头安装盘弧面连接,所述钳头安装盘内设有环形凸台,所述环形凸台上沿圆周方向均布设有四个钳头安装盘导丝孔,所述钳头安装盘的中心设有拉伸杆过孔,所述钳头安装盘弧面与相邻导丝盘上的导丝盘弧面相互接触。
14.进一步地,所述连续体底盘一端对称设有两个圆弧连续体底盘斜面,两个连续体底盘斜面之间通过两个连续体底盘弧面连接,所述连续体底盘内设有环形凸台,所述环形凸台上沿圆周方向均布设有四个连续体底盘导丝孔,所述连续体底盘的中心设有钢丝过孔,所述连续体底盘弧面与相邻导丝盘上的导丝盘弧面相互接触。
15.进一步地,所述组织钳器械安装组件还包括安装板本体、导向轴套和回转关节;所述器械直管通过导向轴套转动连接在安装板本体上,所述器械直管伸出安装板本体的一端连接有回转关节,所述回转关节通过钢丝挡圈固定,所述回转关节和所述钢丝挡圈间设置有管塞。
16.本发明具有以下有益技术效果:
17.本发明采用的导丝经回转关节,进入器械直管,依次穿过导丝弹簧、连续体底盘和多个导丝盘,最后固定在钳头安装盘内部,导丝在运动过程中会与钳头安装盘、导丝盘和连续体底盘产生接触,接触过程中产生的力会迫使柔性连续体手术器械产生弯曲,实现组织钳连续体组件旋转及弯曲动作,相邻两个导丝盘之间相对的导丝盘弧面相互接触,两个导丝盘之间的导丝盘弧面接触后,相对两个导丝盘斜面组成一个梭形导丝盘间隙斜面,导丝盘间隙斜面形成柔性单元,此种柔性连续体器械动作范围广泛。
18.本发明采用的弹簧钢管激光切割螺旋切口,保证连续体弯曲刚度,弹簧钢管具有较强的扭矩,有效的防止连续体非操作性转动,进而加大连续体整体负载,器械直管局部激光切割螺旋切口,单根直管能确保连续体整体强度和精度,局部可弹性弯曲,加大连续体终端器械操作范围。
19.本发明结构精巧,可在人体极其复杂腔道内,控制柔性手术终端器械,实现精准的、安全可靠的手术效果,且解决柔性连续体手术终端器械负载小、活动范围不足等问题,在柔性手术器械中有广泛的应用。
附图说明
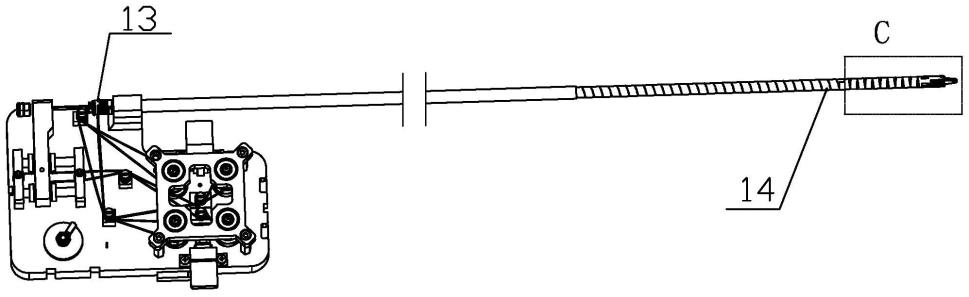
20.图1是本发明的结构示意图;
21.图2是本发明的内部结构示意图;
22.图3是弹簧钢管的布置示意图;
23.图4是图2的a位置局部放大图;
24.图5是弹簧钢管的结构示意图;
25.图6是弹簧钢管的弯曲示意图;
26.图7是弹簧钢管的剖视图;
27.图8是器械直管的结构示意图之一;
28.图9是器械直管的结构示意图之二;
29.图10是本发明的柔性连续体弯曲示意图之一;
30.图11是本发明的柔性连续体弯曲示意图之二;
31.图12是器械直管的剖视图;
32.图13是图12的b位置局部放大图;
33.图14是组织钳器械安装组件的结构示意图;
34.图15是组织钳器械安装组件的剖视图;
35.图16是图1的c位置局部放大图;
36.图17是钳头安装盘的结构示意图;
37.图18是导丝盘的结构示意图;
38.图19是连续体底盘的结构示意图;
39.图中,13、组织钳器械安装组件;1301、安装板本体;1302、器械直管;1302-1、器械直管螺旋切口;1303、导向轴套;1304、回转关节;1305、管塞;1306、钢丝挡圈;
40.14、组织钳连续体组件;1401、钳头安装盘;1401-1、钳头安装盘斜面;1401-2、钳头安装盘弧面;1401-3、钳头安装盘导丝孔;1401-4、拉伸杆过孔;1402、导丝盘;1402-1、环形凸台;1402-2、导丝盘导丝孔;1402-3、导丝盘斜面;1402-4、导丝盘弧面;1402-5、导丝盘间隙斜面;1403、弹簧钢管;1403-1、弹簧钢管螺旋切口;1403-2安装切口;1404、连续体底盘;1404-1、连续体底盘斜面;1404-2、连续体底盘弧面;1404-3、连续体底盘导丝孔;1404-4、钢丝过孔;1405、钢丝;1406、第一钢丝弹簧;1407、导丝弹簧;1408、导丝;1409、第二钢丝弹簧;1410、手术钳组件;1411、拉伸杆。
具体实施方式
41.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合说明书附图及实施例,对本发明进行进一步详细说明,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
42.具体实施方式一:结合图1至图19说明本实施方式,本实施方式所述一种微创手术机器人的柔性终端器械,包括组织钳器械安装组件13和组织钳连续体组件14;所述组织钳连续体组件14安装在组织钳器械安装组件13的器械直管1302上,所述组织钳连续体组件14包括钳头安装盘1401、多个导丝盘1402、连续体底盘1404和四根导丝1408,所述导丝1408在运动过程中与钳头安装盘1401、导丝盘1402和连续体底盘1404产生接触,实现组织钳连续体组件14的旋转及弯曲动作进而执行手术操作。
43.具体实施方式二:结合图1至图19说明本实施方式,本实施方式所述组织钳连续体组件14还包括弹簧钢管1403、钢丝1405和和拉伸杆1411;所述钳头安装盘1401安装在弹簧钢管1403的前端,所述连续体底盘1404安装在弹簧钢管1403的后端,多个导丝盘1402由前
至后依次套装在弹簧钢管1403上,且导丝盘1402位于钳头安装盘1401与连续体底盘1404之间,所述连续体底盘1404安装在器械直管1302上,四根导丝1408呈圆周均匀分布在钢丝1405的外部。
44.所述钢丝1405的一端和拉伸杆1411连接,钢丝1405的另一端依次穿过弹簧钢管1403、连续体底盘1404和器械直管1302,所述导丝1408的一端和钳头安装盘1401连接,导丝1408的另一端依次穿过导丝盘1402、连续体底盘1404和器械直管1302,所述钳头安装盘1401上安装有手术钳组件1410,所述手术钳组件1410的末端和拉伸杆1411连接。
45.所述钢丝1405外部穿有第一钢丝弹簧1406和第二钢丝弹簧1409,所述第一钢丝弹簧1406安装在器械直管1302内部,所述第二钢丝弹簧1409安装在弹簧钢管1403内部,每个所述导丝1408外部均穿有导丝弹簧1407,所述导丝弹簧1407安装在器械直管1302内部。
46.本实施例中器械直管1302内设有第一钢丝弹簧1406,钢丝1405从第一钢丝弹簧1406内部穿过,第一钢丝弹簧1406保护穿过的钢丝1405,防止与其他导丝发生缠绕,器械直管1302内设有四个导丝弹簧1407,导丝1408从导丝弹簧1407内部穿过,导丝弹簧1407保护穿过的导丝1408,防止与其他导丝发生缠绕,并且弹簧可随连续体发生弯曲。
47.连续体底盘1404安装在器械直管1302的另一端,弹簧钢管1403一端安装在连续体底盘1404中,导丝盘1402依次安装在弹簧钢管1403外部,弹簧钢管1403内部设有第二钢丝弹簧1409,钢丝1405在弹簧第二钢丝弹簧1409内部穿过,第二钢丝弹簧1409保护穿过的钢丝1405,防止与其他部件发生缠绕钢丝1405一端固定在拉伸杆1411上,拉伸杆1411穿过钳头安装盘1401,手术钳组件1410安装在钳头安装盘1401上。
48.其它组成及连接关系与具体实施方式一相同。
49.具体实施方式三:结合图1至图19说明本实施方式所述器械直管1302和连续体底盘1404连接的一端通过四轴激光切割加工有一段器械直管螺旋切口1302-1,所述器械直管1302由镍钛合金制成;所述弹簧钢管1403通过四轴激光切割整体加工有弹簧钢管螺旋切口1403-1,所述弹簧钢管1403由镍钛合金制成,所述弹簧钢管1403的两端加工有安装切口1403-2。
50.本实施例中弹簧钢管1403通过四轴激光切割,加工出弹簧钢管螺旋切口1403-1,弹簧钢管具有良好的许用应变和结构强度,置于连续体内部,保证弹簧钢管1403弯曲刚度适配于连续体弯曲和复位所需值,且能确保手术钳组件1410的工作负载,弹簧钢管1403弯曲角度在60
°
内,复位效果最佳,弹簧钢管1403两端加工安装切口1403-2,安装后实现组织钳连续体组件14在手术中不发生非操作性转动;器械直管1302局部通过四轴激光切割,加工出器械直管螺旋切口1302-1,实现器械直管1302局部可弯曲,加大手术钳组件1410可操作范围,器械直管1302整根钢管即可实现弯曲功能,且能保证整体精度,又比链接钢管强度更高,使连续体终端器械更加稳定可靠。
51.其它组成及连接关系与具体实施方式一相同。
52.具体实施方式四:结合图1至图19说明本实施方式,本实施方式所述导丝盘1402是空心柱体,且导丝盘1402内设有环形凸台1402-1,所述环形凸台1402-1上沿圆周方向均布设有四个导丝盘导丝孔1402-2,所述导丝盘1402的端面对称设有两个圆弧导丝盘斜面1402-3,两个导丝盘斜面1402-3之间通过两个导丝盘弧面1402-4连接,所述导丝盘1402一端的两个导丝盘弧面1402-4的中心连线与另一端的两个导丝盘弧面1402-4的中心连线垂
直,相邻两个导丝盘1402之间相对的导丝盘弧面1402-4相互接触,两个导丝盘1402之间的导丝盘弧面1402-4接触后,其相对的两个导丝盘斜面1402-3组成一个梭形导丝盘间隙斜面1402-5。
53.所述钳头安装盘1401的一端对称设有两个圆弧钳头安装盘斜面1401-1,两个钳头安装盘斜面1401-1之间通过两个钳头安装盘弧面1401-2连接,所述钳头安装盘1401内设有环形凸台,所述环形凸台上沿圆周方向均布设有四个钳头安装盘导丝孔1401-3,所述钳头安装盘1401的中心设有拉伸杆过孔1401-4,所述钳头安装盘弧面1401-2与相邻导丝盘1402上的导丝盘弧面1402-4相互接触。
54.所述连续体底盘1404一端对称设有两个圆弧连续体底盘斜面1404-1,两个连续体底盘斜面1404-1之间通过两个连续体底盘弧面1404-2连接,所述连续体底盘1404内设有环形凸台,所述环形凸台上沿圆周方向均布设有四个连续体底盘导丝孔1404-3,所述连续体底盘104的中心设有钢丝过孔1404-4,所述连续体底盘弧面1404-2与相邻导丝盘1402上的导丝盘弧面1402-4相互接触。
55.本实施例中相邻两个导丝盘1402之间相对的导丝盘弧面1402-4相互接触,两个导丝盘1402之间的导丝盘弧面1402-4接触后,其相对的两个导丝盘斜面1402-3组成一个梭形导丝盘间隙斜面1402-5,导丝盘间隙斜面1402-5形成柔性单元,此种柔性连续体器械动作范围广泛。
56.其它组成及连接关系与具体实施方式一相同。
57.具体实施方式五:结合图1至图19说明本实施方式,本实施方式所述组织钳器械安装组件13还包括安装板本体1301、导向轴套1303和回转关节1304;所述器械直管1302通过导向轴套1303转动连接在安装板本体1301上,所述器械直管1302伸出安装板本体1301的一端连接有回转关节1304,所述回转关节1304通过钢丝挡圈1306固定,所述回转关节1304和所述钢丝挡圈1306间设置有管塞1305。本实施例中所述管塞1305为不锈钢管塞,管塞1305的型号采用通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知。
58.其它组成及连接关系与具体实施方式一相同。
59.具体实施方式六:结合图1至图19说明本实施方式,本实施方式所述一种微创手术机器人的柔性连续体终端器械,组织钳器械安装组件13包括器械直管1302、导向轴套1303、回转关节1304、管塞1305和钢丝挡圈1306,器械直管1302通过导向轴套1303安装在安装板本体1301上,回转关节1304安装在器械直管1302上,使用钢丝挡圈1306将回转关节1304固定在器械直管1302上,不锈钢管塞1305安装在器械直管1302端头;器械直管1302内设有第一钢丝弹簧1406,钢丝1405从第一钢丝弹簧1406内部穿过,第一钢丝弹簧1406保护穿过的钢丝1405,防止与其他导丝发生缠绕,器械直管1302内设有四个导丝弹簧1407,导丝1408从导丝弹簧1407内部穿过,导丝弹簧1407保护穿过的导丝1408,防止与其他导丝发生缠绕,并且弹簧可随连续体发生弯曲。
60.连续体底盘1404安装在器械直管1302的另一端,弹簧钢管1403一端安装在连续体底盘1404中,导丝盘1402依次安装在弹簧钢管1403外部,弹簧钢管1403内部设有第二钢丝弹簧1409,钢丝1405在弹簧第二钢丝弹簧1409内部穿过,第二钢丝弹簧1409保护穿过的钢丝1405,防止与其他部件发生缠绕钢丝1405一端固定在拉伸杆1411上,拉伸杆1411穿过钳
头安装盘1401,手术钳组件1410安装在钳头安装盘1401上。
61.弹簧钢管1403通过四轴激光切割,加工出弹簧钢管螺旋切口1403-1,弹簧钢管具有良好的许用应变和结构强度,置于连续体内部,保证弹簧钢管1403弯曲刚度适配于连续体弯曲和复位所需值,且能确保手术钳组件1410的工作负载,弹簧钢管1403弯曲角度在60
°
内,复位效果最佳,弹簧钢管1403两端加工安装切口1403-2,安装后实现组织钳连续体组件14在手术中不发生非操作性转动;器械直管1302局部通过四轴激光切割,加工出器械直管螺旋切口1302-1,实现器械直管1302局部可弯曲,加大手术钳组件1410可操作范围,器械直管1302整根钢管即可实现弯曲功能,且能保证整体精度,又比链接钢管强度更高,使连续体终端器械更加稳定可靠。
62.本发明通过电机驱动传动组件中的电机牵引导丝1408动作,四根导丝1408经回转关节1304,进入器械直管1302,依次穿过导丝弹簧1407、连续体底盘1404、多个导丝盘1402,最后固定在钳头安装盘1401内部,导丝1408在运动过程中会与钳头安装盘1401、导丝盘1402和连续体底盘1404产生接触,接触过程中产生的力会迫使柔性连续体手术器械产生弯曲,实现组织钳连续体组件14旋转及弯曲动作,进而执行手术操作。本发明采用电机驱动传动组件中的电机、传动系统均为现有技术,部件型号采用通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知,能实现驱动功能即可,不是本发明保护的重点。
63.其它组成及连接关系与具体实施方式一相同。
64.工作原理:本发明包括组织钳器械安装组件13和组织钳连续体组件14;所述组织钳连续体组件14安装在组织钳器械安装组件13的器械直管1302上,所述组织钳连续体组件14包括钳头安装盘1401、多个导丝盘1402、连续体底盘1404和四根导丝1408,组织钳器械安装组件13包括器械直管1302、导向轴套1303、回转关节1304、管塞1305和钢丝挡圈1306,器械直管1302通过导向轴套1303安装在安装板本体1301上,回转关节1304安装在器械直管1302上,使用钢丝挡圈1306将回转关节1304固定在器械直管1302上,不锈钢管塞1305安装在器械直管1302端头;器械直管1302内设有第一钢丝弹簧1406,钢丝1405从第一钢丝弹簧1406内部穿过,第一钢丝弹簧1406保护穿过的钢丝1405,防止与其他导丝发生缠绕,器械直管1302内设有四个导丝弹簧1407,导丝1408从导丝弹簧1407内部穿过,导丝弹簧1407保护穿过的导丝1408,防止与其他导丝发生缠绕,并且弹簧可随连续体发生弯曲。
65.连续体底盘1404安装在器械直管1302的另一端,弹簧钢管1403一端安装在连续体底盘1404中,导丝盘1402依次安装在弹簧钢管1403外部,弹簧钢管1403内部设有第二钢丝弹簧1409,钢丝1405在弹簧第二钢丝弹簧1409内部穿过,第二钢丝弹簧1409保护穿过的钢丝1405,防止与其他部件发生缠绕钢丝1405一端固定在拉伸杆1411上,拉伸杆1411穿过钳头安装盘1401,手术钳组件1410安装在钳头安装盘1401上。
66.本发明通过电机驱动传动组件中的电机牵引导丝1408动作,四根导丝1408经回转关节1304,进入器械直管1302,依次穿过导丝弹簧1407、连续体底盘1404、多个导丝盘1402,最后固定在钳头安装盘1401内部,导丝1408在运动过程中会与钳头安装盘1401、导丝盘1402和连续体底盘1404产生接触,接触过程中产生的力会迫使柔性连续体手术器械产生弯曲,实现组织钳连续体组件14旋转及弯曲动作,进而执行手术操作。
67.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技
术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1